Mikles J., Fikar M. Process Modelling, Identification, and Control
Подождите немного. Документ загружается.


168 4 Dynamical Behaviour of Processes
Variance of a continuous random variable ξ can be expressed as follows
σ
2
= E
(ξ −μ)
2
=
∞
−∞
(x −μ)
2
f(x)dx (4.210)
σ
2
= E
ξ
2
− (E {ξ})
2
(4.211)
The standard deviation is its square root
σ =
E {ξ
2
}−(E {ξ})
2
(4.212)
Normal distribution for a continuous random variable is given by the fol-
lowing density function
f(x)=
1
σ
√
2π
e
−
(x −μ)
2
2σ
2
(4.213)
Let us now consider two independent continuous random variables ξ
1
,ξ
2
defined in the same probability space. Their joint density function is given by
the product
f(x
1
,x
2
)=f
1
(x
1
)f
2
(x
2
) (4.214)
where f
1
(x
1
),f
2
(x
2
) are density functions of the variables ξ
1
,ξ
2
.
Similarly as for one random variable, we can introduce the moments (if
they exist) also for two random variables, for example by
E {ξ
r
1
,ξ
s
2
} =
∞
−∞
∞
−∞
x
r
1
x
s
2
f(x
1
,x
2
)dx
1
dx
2
(4.215)
Correspondingly, the central moments are defined as
E {(ξ
1
− μ
1
)
r
(ξ
2
− μ
2
)
s
} =
∞
−∞
∞
−∞
(x
1
−μ
1
)
r
(x
2
−μ
2
)
s
f(x
1
,x
2
)dx
1
dx
2
(4.216)
where μ
1
= E {ξ
1
},μ
2
= E {ξ
2
}.
Another important property characterising two random variables is their
covariance defined as
Cov (ξ
1
,ξ
2
)=E {(ξ
1
− μ
1
)(ξ
2
− μ
2
)}
=
∞
−∞
∞
−∞
(x
1
− μ
1
)(x
2
− μ
2
)f(x
1
,x
2
)dx
1
dx
2
(4.217)
If ξ
1
,ξ
2
have finite variances, then the number
r(ξ
1
,ξ
2
)=
Cov (ξ
1
,ξ
2
)
σ
1
σ
2
(4.218)
is called the correlation coefficient (σ
1
=
D[ξ
1
],σ
2
=
D[ξ
2
]).
4.4 Statistical Characteristics of Dynamic Systems 169
Random variables ξ
1
,ξ
2
are uncorrelated if
Cov (ξ
1
,ξ
2
) = 0 (4.219)
Integrable random variables ξ
1
,ξ
2
with integrable term ξ
1
ξ
2
are uncorrelated
if and only if
E {ξ
1
,ξ
2
} = E {ξ
1
}E {ξ
2
} (4.220)
This follows from the fact that Cov (ξ
1
,ξ
2
)=E {ξ
1
,ξ
2
}−E {ξ
1
}E {ξ
2
}.Thus
the multiplicative property of probabilities extends to expectations.
If ξ
1
,ξ
2
are independent integrable random variables then they are uncor-
related.
A vector of random variables ξ =(ξ
1
,...,ξ
n
)
T
is usually computationally
characterised only by its expected value E {ξ} and the covariance matrix
Cov (ξ).
The expected value E {ξ} of a vector ξ is given as the vector of expected
values of the elements ξ
i
.
The covariance matrix Cov (ξ) of a vector ξ with the expected value E {ξ}
is the expected value of the matrix (ξ − E {ξ})(ξ −E {ξ})
T
, hence
Cov (ξ)=E
(ξ − E[ξ])(ξ − E {ξ})
T
(4.221)
A covariance matrix is a symmetric positive (semi-)definite matrix that con-
tains in i-th row and j-th column covariances of the random variables ξ
i
,ξ
j
:
Cov (ξ
i
,ξ
j
)=E {(ξ
i
− E {ξ
i
})(ξ
j
− E {ξ
j
})} (4.222)
Elements of a covariance matrix determine a degree of correlation between
random variables where
Cov (ξ
i
,ξ
j
)=Cov(ξ
j
,ξ
i
) (4.223)
The main diagonal of a covariance matrix contains variances of random vari-
ables ξ
i
:
Cov (ξ
i
,ξ
i
)=E {(ξ
i
− E {ξ
i
})(ξ
i
− E {ξ
i
})} = σ
2
i
(4.224)
4.4.3 Stochastic Processes
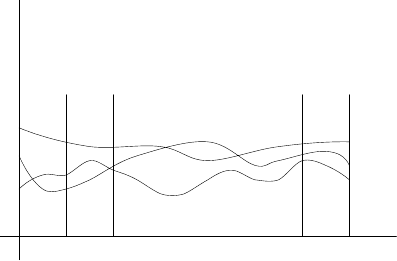
When dealing with dynamic systems, some phenomenon can be observed as
a function of time. When some physical variable (temperature in a CSTR) is
measured under the same conditions in the same time t
m
several times, the
results may resemble trajectories shown in Fig. 4.30. The trajectories 1,2,3 are
all different. It is impossible to determine the trajectory 2 from the trajectory 1
and from 2 we are unable to predict the trajectory 3. This is the reason that it
is not interesting to investigate time functions independently but rather their
170 4 Dynamical Behaviour of Processes
t
1
t
2
t
n
t
m
t
1
2
3
ξ
Fig. 4.30. Realisations of a stochastic process
large sets. If their number approaches infinity, we speak about a stochastic
(random) process.
A stochastic process is given as a set of time-dependent random variables
ξ(t). Thus, the concept of a random variable ξ is broadened to a random
function ξ(t). It might be said that a stochastic process is such a function
of time whose values are at any time instant random variables. A random
variable in a stochastic process yields random values not only as an outcome of
an experiment but also as a function of time. A random variable corresponding
to some experimental conditions and changing in time that belongs to the set
of random variables ξ(t) is called the realisation of a stochastic process.
A stochastic process in some fixed time instants t
1
,t
2
,...,t
n
depends only
on the outcome of the experiment and changes to a corresponding random
variable with a given density function. From this follows that a stochastic
process can be determined by a set of density functions that corresponds to
random variables ξ(t
1
),ξ(t
2
),...,ξ(t
n
) in the time instants t
1
,t
2
,...,t
n
.The
density function is a function of time and is denoted by f(x, t). For any time
t
i
(i =1, 2,...,n) exists the corresponding density function f(x
i
,t
i
).
Consider a time t
1
and the corresponding random variable ξ(t
1
). The prob-
ability that ξ(t
1
) will be between x
1
and x
1
+dx
1
is given as
P (x
1
≤ ξ(t
1
) <x
1
+dx
1
)=f
1
(x
1
,t
1
)dx
1
(4.225)
where f
1
(x
1
,t
1
) is the density function in time t
1
(one-dimensional density
function).
Now consider two time instants t
1
and t
2
. The probability that a random
variable ξ(t
1
) will be in time t
1
between x
1
and x
1
+dx
1
and in time t
2
between
x
2
and x
2
+dx
2
can be calculated as
P (x
1
≤ ξ(t
1
) <x
1
+dx
1
; x
2
≤ ξ(t
2
) <x
2
+dx
2
)=f
2
(x
1
,t
1
; x
2
,t
2
)dx
1
dx
2
(4.226)
4.4 Statistical Characteristics of Dynamic Systems 171
where f
2
(x
1
,t
1
; x
2
,t
2
)istwo-dimensional density function and determines the
relationship between the values of a stochastic process ξ(t) in the time instants
t
1
and t
2
.
Sometimes, also n-dimensional density function f
2
(x
1
,t
1
; x
2
,t
2
; ...; x
n
,t
n
)
is introduced and is analogously defined as a probability that a process ξ(t)
passes through n points with deviation not greater than dx
1
, dx
2
,...,dx
n
.
A stochastic process is statistically completely determined by the density
functions f
1
,...,f
n
and the relationships among them.
The simplest stochastic process is a totally independent stochastic process
(white noise). For this process, any random variables at any time instants are
mutually independent. For this process holds
f
2
(x
1
,t
1
; x
2
,t
2
)=f(x
1
,t
1
)f(x
2
,t
2
) (4.227)
as well as
f
n
(x
1
,t
1
; x
2
,t
2
; ...; x
n
,t
n
)=f(x
1
,t
1
)f(x
2
,t
2
) ...f(x
n
,t
n
) (4.228)
Based on the one-dimensional density function, the expected value of a
stochastic process is given by
μ(t)=E {ξ(t)} =
∞
−∞
xf
1
(x, t)dx (4.229)
In (4.229) the index of variables of f
1
is not given as it can be arbitrary.
Variance of a stochastic process can be written as
D[ξ(t)] =
∞
−∞
[x −μ(t)]
2
f
1
(x, t)dx (4.230)
D[ξ(t)] = E
ξ
2
(t)
− (E {ξ(t)})
2
(4.231)
Expected value of a stochastic process μ(t) is a function of time and it is
the mean value of all realisations of a stochastic process. The variance D[ξ(t)]
gives information about dispersion of realisations with respect to the mean
value μ(t).
Based on the information given by the two-dimensional density function,
it is possible to find an influence between the values of a stochastic process at
times t
1
and t
2
. This is given by the auto-correlation function of the form
R
ξ
(t
1
,t
2
)=E {ξ(t
1
)ξ(t
2
)} =
∞
−∞
∞
−∞
x
1
x
2
f
2
(x
1
,t
1
; x
2
,t
2
)dx
1
dx
2
(4.232)
The auto-covariance function is given as
Cov
ξ
(t
1
,t
2
)=E {(ξ(t
1
) −μ(t
1
))(ξ(t
2
) −μ(t
2
))}
=
∞
−∞
∞
−∞
[x
1
− μ(t
1
)][x
2
− μ(t
2
)]f
2
(x
1
,t
1
; x
2
,t
2
)dx
1
dx
2
(4.233)
172 4 Dynamical Behaviour of Processes
For the auto-correlation function follows
R
ξ
(t
1
,t
2
)=Cov
ξ
(t
1
,t
2
) −μ(t
1
)μ(t
2
) (4.234)
Similarly, for two stochastic processes ξ(t)andη(t), we can define the
correlation function
R
ξη
(t
1
,t
2
)=E {ξ(t
1
)η(t
2
)} (4.235)
and the covariance function
Cov
ξη
(t
1
,t
2
)=E {(ξ(t
1
) −μ(t
1
))(η(t
2
) −μ
η
(t
2
))} (4.236)
If a stochastic process with normal distribution is to be characterised, it
usually suffices to specify its mean value and the correlation function. However,
this does not hold in the majority of cases.
When replacing the arguments t
1
, t
2
in Equations (4.232), (4.234) by t
and τ then
R
ξ
(t, τ)=E {ξ(t)ξ(τ)} (4.237)
and
Cov
ξ
(t, τ)=E {(ξ(t) − μ(t))(ξ(τ) − μ(τ))} (4.238)
If t = τ then
Cov
ξ
(t, t)=E
(ξ(t) − μ(t))
2
(4.239)
where Cov
ξ
(t, t) is equal to the variance of the random variable ξ. The ab-
breviated form Cov
ξ
(t)=Cov
ξ
(t, t) is also often used.
Consider now mutually dependent stochastic processes ξ
1
(t),ξ
2
(t),...ξ
n
(t)
that are elements of stochastic process vector ξ(t). In this case, the mean values
and auto-covariance function are often sufficient characteristics of the process.
The vector mean value of the vector ξ(t) is given as
μ(t)=E {ξ(t)} (4.240)
The expression
Cov
ξ
(t
1
,t
2
)=E
(ξ(t
1
) −μ(t
1
))(ξ(t
2
) −μ(t
2
))
T
(4.241)
or
Cov
ξ
(t, τ)=E
(ξ(t) −μ(t))(ξ(τ ) −μ(τ))
T
(4.242)
is the corresponding auto-covariance matrix of the stochastic process vector
ξ(t).
The auto-covariance matrix is symmetric, thus

4.4 Statistical Characteristics of Dynamic Systems 173
Cov
ξ
(τ,t)=Cov
T
ξ
(t, τ) (4.243)
If a stochastic process is normally distributed then the knowledge about
its mean value and covariance is sufficient for obtaining any other process
characteristics.
For the investigation of stochastic processes, the following expression is
often used
¯μ = lim
T →∞
1
2T
T
−T
ξ(t)dt (4.244)
¯μ is not time dependent and follows from observations of the stochastic process
in a sufficiently large time interval and ξ(t) is any realisation of the stochastic
process. In general, the following expression is used
¯
μ
m
= lim
T →∞
1
2T
T
−T
[ξ(t)]
m
dt (4.245)
For m = 2 this expression gives
¯
μ
2
.
Stochastic processes are divided into stationary and non-stationary.Inthe
case of a stationary stochastic process, all probability densities f
1
,f
2
,... f
n
do not depend on the start of observations and onedimensional probability
density is not a function of time t. Hence, the mean value (4.229) and the
variance (4.230) are not time dependent as well.
Many stationary processes are ergodic, i.e. the following holds with prob-
ability equal to one
μ =
∞
−∞
xf
1
(x)dx =¯μ = lim
T →∞
1
2T
T
−T
ξ(t)dt (4.246)
μ
2
=
¯
μ
2
,μ
m
=
¯
μ
m
(4.247)
The usual assumption in practice is that stochastic processes are stationary
and ergodic.
The properties (4.246) and (4.247) show that for the investigation of sta-
tistical properties of a stationary and ergodic process, it is only necessary to
observe its one realisation in a sufficiently large time interval.
Stationary stochastic processes have a two-dimensional density function
f
2
independent of the time instants t
1
, t
2
, but dependent on τ = t
2
− t
1
that separates the two random variables ξ(t
1
), ξ(t
2
). As a result, the auto-
correlation function (4.232) can be written as
R
ξ
(τ)=E {ξ(t
1
)ξ(t
2
)} =
∞
−∞
∞
−∞
x
1
x
2
f
2
(x
1
,x
2
,τ)dx
1
dx
2
(4.248)
For a stationary and ergodic process hold the equations (4.246), (4.247) and
the expression E {ξ(t)ξ(t + τ )} can be written as

174 4 Dynamical Behaviour of Processes
E {ξ(t)ξ(t + τ)} = ξ(t)ξ(t + τ)
= lim
T →∞
1
2T
T
−T
ξ(t)ξ(t + τ )dt (4.249)
Hence, the auto-correlation function of a stationary ergodic process is in the
form
R
ξ
(τ) = lim
T →∞
1
2T
T
−T
ξ(t)ξ(t + τ )dt (4.250)
Auto-correlation function of a process determines the influence of a random
variable between the times t+τ and t. If a stationary ergodic stochastic process
is concerned, its auto-correlation function can be determined from any of its
realisations.
The auto-correlation function R
ξ
(τ) is symmetric
R
ξ
(−τ)=R
ξ
(τ) (4.251)
For τ = 0 the auto-correlation function is determined by the expected
value of the square of the random variable
R
ξ
(0) = E
ξ
2
(t)
= ξ(t)ξ(t) (4.252)
For τ →∞the auto-correlation function is given as the square of the
expected value. This can easily be proved.
R
ξ
(τ)=ξ(t)ξ(t + τ)=
∞
−∞
∞
−∞
x
1
x
2
f
2
(x
1
,x
2
,τ)dx
1
dx
2
(4.253)
For τ →∞, ξ(t)andξ(t + τ ) are mutually independent. Using (4.227) that
can be applied to a stochastic process yields
R
ξ
(∞)=
∞
−∞
x
1
f(x
1
)dx
1
∞
−∞
x
2
f(x
2
)dx
2
= μ
2
=(¯μ)
2
(4.254)
The value of the auto-correlation function for τ = 0 is in its maximum and
holds
R
ξ
(0) ≥ R
ξ
(τ) (4.255)
The cross-correlation function of two mutually ergodic stochastic processes
ξ(t), η(t) can be given as
E {ξ(t)η(t + τ )} =
ξ(t)η(t + τ) (4.256)
or
R
ξη
(τ)=
∞
−∞
∞
−∞
x
1
y
2
f
2
(x
1
,y
2
,τ)dx
1
dy
2
= lim
T →∞
1
2T
T
−T
ξ(t)η(t + τ)dt (4.257)

4.4 Statistical Characteristics of Dynamic Systems 175
Consider now a stationary ergodic stochastic process with corresponding
auto-correlation function R
ξ
(τ). This auto-correlation function provides infor-
mation about the stochastic process in the time domain. The same information
can be obtained in the frequency domain by taking the Fourier transform of
the auto-correlation function. The Fourier transform S
ξ
(ω)ofR
ξ
(τ) is given
as
S
ξ
(ω)=
∞
−∞
R
ξ
(τ)e
−jωτ
dτ (4.258)
Correspondingly, the auto-correlation function R
ξ
(τ) can be obtained if S
ξ
(ω)
is known using the inverse Fourier transform
R
ξ
(τ)=
1
2π
∞
−∞
S
ξ
(ω)e
jωτ
dω (4.259)
R
ξ
(τ)andS
ξ
(ω) are non-random characteristics of stochastic processes. S
ξ
(ω)
is called power spectral density of a stochastic process. This function has large
importance for investigation of transformations of stochastic signals entering
linear dynamical systems.
The power spectral density is an even function of ω:
S
ξ
(−ω)=S
ξ
(ω) (4.260)
For its determination, the following relations can be used.
S
ξ
(ω)=2
∞
0
R
ξ
(τ)cosωτdτ (4.261)
R
ξ
(τ)=
1
π
∞
0
S
ξ
(ω)cosωτdω (4.262)
The cross-power spectral density S
ξη
(ω) of two mutually ergodic stochastic
processes ξ(t),η(t) with zero means is the Fourier transform of the associated
cross-correlation function R
ξη
(τ):
S
ξη
(ω)=
∞
−∞
R
ξη
(τ)e
−jωτ
dτ (4.263)
The inverse relation for the cross-correlation function R
ξη
(τ)ifS
ξη
(ω)is
known, is given as
R
ξη
(τ)=
1
2π
∞
−∞
S
ξη
(ω)e
jωτ
dω (4.264)
If we substitute in (4.249), (4.259) for τ = 0 then the following relations
can be obtained
E
ξ(t)
2
= R
ξ
(0) = lim
T →∞
1
2T
T
−T
ξ
2
(t)dt (4.265)
E
ξ(t)
2
= R
ξ
(0) =
1
2π
∞
−∞
S
ξ
(ω)dω =
1
π
∞
0
S
ξ
(ω)dω (4.266)
176 4 Dynamical Behaviour of Processes
The equation (4.265) describes energetical characteristics of a process. The
right hand side of the equation can be interpreted as the average power of the
process. The equation (4.266) determines the power as well but expressed in
terms of power spectral density. The average power is given by the area under
the spectral density curve and S
ξ
(ω) characterises power distribution of the
signal according to the frequency. For S
ξ
(ω) holds
S
ξ
(ω) ≥ 0 (4.267)
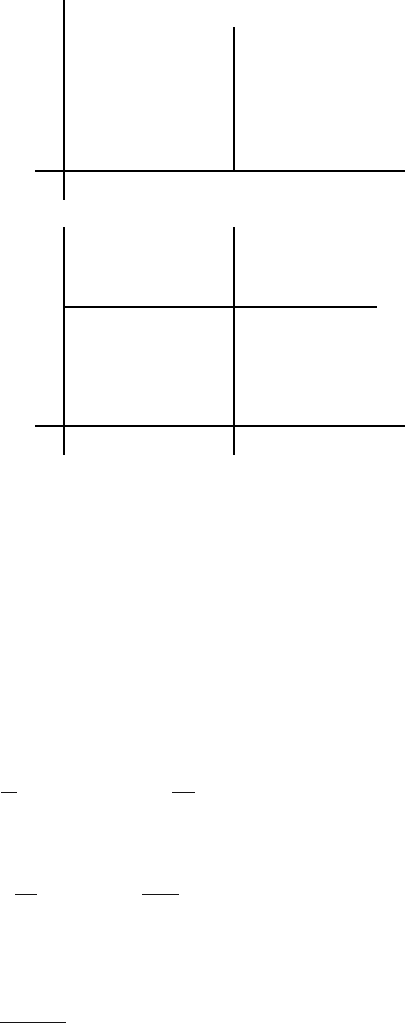
4.4.4 White Noise
Consider a stationary stochastic process with a constant power spectral den-
sity for all frequencies
S
ξ
(ω)=V (4.268)
This process has a “white” spectrum and it is called white noise. Its power
spectral density is shown in Fig. 4.31a. From (4.266) follows that the average
power of white noise is indefinitely large, as
E
ξ(t)
2
=
1
π
V
∞
0
dω (4.269)
Therefore such a process does not exit in real conditions.
The auto-correlation function of the white noise can be determined from
equation (4.262)
R
ξ
(τ)=
1
π
∞
0
V cos ωτdω = Vδ(τ ) (4.270)
where
δ(τ)=
1
π
∞
0
cos ωτdω (4.271)
because the Fourier transform of the delta function F
δ
(jω) is equal to one and
the inverse Fourier transform is of the form
δ(τ)=
1
2π
∞
−∞
F
δ
(jω)e
jωτ
dω
=
1
2π
∞
−∞
e
jωτ
dω
=
1
2π
∞
−∞
cos ωτdω +j
1
2π
∞
−∞
sin ωτdω
=
1
π
∞
0
cos ωτdω (4.272)
4.4 Statistical Characteristics of Dynamic Systems 177
6
S
ξ
R
ξ
V
0
ω
a)
b)Vδ(τ)
τ
0
Fig. 4.31. Power spectral density and auto-correlation function of white noise
The auto-correlation function of white noise (Fig. 4.31b) is determined by the
delta function and is equal to zero for any non-zero values of τ. White noise
is an example of a stochastic process where ξ(t)andξ(t + τ ) are independent.
A physically realisable white noise can be introduced if its power spectral
density is constrained
S
ξ
(ω)=V for |ω| <ω
1
S
ξ
(ω)=0 for|ω| >ω
1
(4.273)
The associated auto-correlation function can be given as
R
ξ
(τ)=
V
π
ω
1
0
cos ωτdω =
V
πτ
sin ω
1
τ (4.274)
The following relation also holds
¯μ
2
= D =
V
2π
ω
1
−ω
1
dω =
Vω
1
π
(4.275)
Sometimes, the relation (4.268) is approximated by a continuous function.
Often, the following relation can be used
S
ξ
(ω)=
2aD
ω
2
+ a
2
(4.276)
The associated auto-correlation function is of the form