Леонов Г.А., Шумафов М.М. Проблемы стабилизации линейных управляемых систем
Подождите немного. Документ загружается.


221
Выберем s
1
так, чтобы характеристический многочлен системы (9),
где u = s
1
x
2
, имел вид
p
3
+ αp
2
+ (s
1
+ β)p + γ = (p − κ)(p
2
+ α
1
p + β
1
),
где α
1
= α + κ, β
1
= −γ/κ, κ > 0 и
s
1
= −β − κ(α + κ) −
γ
κ
.
Ясно, что при достаточно малых κ и, следовательно, при достаточно
больших s
1
, многочлен p
2
+α
1
p+ β
1
имеет комплексные корни −λ±iω,
где λ = (α+κ)/2. Очевидно, что при достаточно малых κ выполнено
неравенство λ > κ. Значит, все условия теоремы 1 (§ 7) выполнены.
Поскольку для системы (9)
T r (A + bs(t)
∗
c
∗
) = −α ∀t ∈ R,
то в силу теоремы 2 из § 8 при α < 0 невозможна асимптотическая
устойчивость системы (9) (u = s(t)y).
Таким образом, нами получен следующий результат.
Теорема 3. Пусть α 6= 0, γ 6= 0. Тогда для стабилизируемости
системы (9) необходимо и достаточно, чтобы α > 0.
3) Пусть передаточная функция системы со скалярным входом
u(t) и скалярным выходом y(t) имеет вид
W (p) =
p
2
p
3
+ αp
2
+ βp + γ
где α, β, γ ∈ R, γ 6= 0. Тогда эту систему можно реализовать (в силу
следствия теоремы 2 из § 3, гл.II ) в фазовом пространстве R
3
как
систему вида (1) (§ 1)
˙x
1
= x
2
,
˙x
2
= x
3
,
˙x
3
= −(αx
3
+ βx
2
+ γx
1
) − u, y = x
3
.
(10)
Здесь
A =
0 1 0
0 0 1
−γ −β − α
, b =
0
0
−1
, c =
0
0
1
222
Стационарная стабилизация u = s
0
y этой системы возможна тогда
и только тогда, когда
β > 0, γ > 0.
В случае β < 0, γ < 0 стабилизация (как стационарная, так и неста-
ционарная) невозможна в силу теоремы 1 из § 8 (здесь c
1
= c
2
= 0,
c
3
= 1; a
1
= γ < 0, a
2
= β < 0).
Рассмотрим случай β > 0, γ < 0 (когда стационарная стабилиза-
ция невозможна). Применим теорему 1 из § 4. Как и выше, примем
s
1
= s
2
; λ
1
= λ
2
= λ, κ
1
= κ
2
= κ.
Выберем s
1
так, чтобы характеристический многочлен системы
(10), где u = s
1
y, принял вид
p
3
+ (α + s
1
)p
2
+ βp + γ = (p − κ)(p
2
+ α
1
p + β
1
),
где κ > 0 и
α
1
= −
γ + βκ
κ
2
, β
1
= −
γ
κ
, s
1
= −
γ + βκ
κ
2
− κ − α .
При достаточно малом κ > 0 (и достаточно большом s
1
) мно-
гочлен p
2
+ α
1
p + β
1
имеет два отрицательных корня, больший из
которых равен
ν =
γ + βκ
2κ
2
+
r
(γ + βκ)
2
4κ
4
+
γ
κ
.
За число λ примем −ν : λ = −ν.
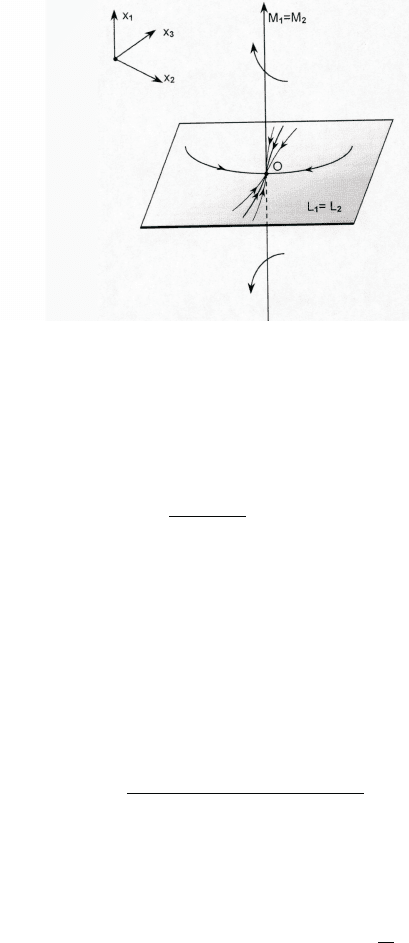
Легко проверить, что неравенство λ > κ сводится к неравенству
β + κ
2
> 0, которое имеет место (так как β > 0). Таким образом,
здесь (рис.23)
dim M
1
= dim M
2
= 1, dim L
1
= dim L
2
= 2.
Возьмем σ
0
так, чтобы характеристический многочлен системы
(10), где u = σ
0
y, имел вид:
p
3
+ (α + σ
0
)p
2
+ βp + γ = (p − κ
0
)(p
2
+ α
0
p + β
0
),
где κ
0
> 0 и
α
0
= −
γ + βκ
0
κ
2
0
, β
0
= −
γ
κ
0
, σ
0
= −
γ + βκ
0
κ
2
0
− κ
0
− α.
223
Рис.23. Неустойчивое M
1
= M
2
и устойчивое L
1
= L
2
многообразия
системы (10), где u = s
1
y.
При достаточно большом κ
0
(и |σ
0
|) многочлен p
2
+α
0
p+ β
0
имеет
комплексно сопряженные корни λ
0
± iω
0
, причем
λ
0
=
γ + βκ
0
2κ
2
0
> 0.
Поэтому, не умаляя общности, можно принять (это равносильно
линейной замене координат x
1
, x
2
, x
3
), что
A + σ
0
bc
∗
=
µ
κ
0
0
0 Q
¶
, b =
µ
b
1
b
2
¶
, c =
µ
c
1
c
2
¶
,
где Q − (2 × 2)-матрица, имеющая собственные значения λ
0
± iω
0
,
b
1
, c
1
∈ R, b
2
, c
2
∈ R
2
. Также (без умаления общности) можно счи-
тать, что
W (p) =
p
2
p
3
+ (α + σ
0
)p
2
+ βp + γ
(этого можно добиться всегда за счет изменения функции s(t) в об-
ратной связи u = s(t)y для системы (10)).
Поскольку W (p) = c
∗
(A − pI)
−1
b, то
1 = lim
p→∞
pW (p) = pc
∗
(A − pI)
−1
b = − lim
p→∞
c
∗
(I −
A
p
)
−1
b = −c
∗
b,
224
т.е.
c
∗
b = −1.
Как и в доказательстве теоремы 2 из § 7 (заменяя матрицу A на
A + σ
0
bc
∗
), установим, что
lim
p→∞
(κ − p)W (p) = b
1
c
1
.
Используя последние два соотношения и вид функции W (p), будем
иметь:
c
∗
b
b
1
c
1
=
−1
lim
p→∞
(κ
0
− p)W (p)
= 1+
α
2
κ
0
+ β
2
κ
2
0
= 1−
2γ
κ
3
0
−
β
κ
2
0
< 1 (11)
при достаточно большом κ
0
.
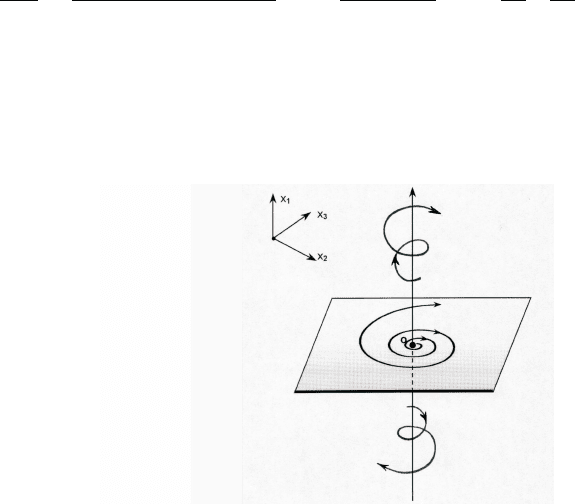
Траектории системы
˙x = (A + σ
0
bc
∗
)x (12)
имеют вид, изображенный на рис.24.
Рис.24. Траектории системы (10), где u = σ
0
y.
Так как матрица Q имеет комплексные собственные значения, то
для ненулевого вектора d ∈ M
1
существует число τ
1
> 0 такое, что
векторы
b,
1
0
0
, [exp(A + σ
0
bc
∗
)τ
1
]d
225
принадлежат одной плоскости (следует учесть, что фазовый поток
{f
t
} системы (12) аффинно эквивалентен семейству растяжений вдоль
оси x
1
с одновременным вращением (на угол ω
0
t) вокруг этой оси;
здесь f
t
= exp(A + σ
0
bc
∗
)t).
С учетом неравенства (11) из леммы 2 (§ 7) следует существование
чисел µ и τ(µ) таких, что (в лемме 2 § 7 h
∗
:= (1, 0, 0))
(1, 0, 0) · [exp(A + (σ
0
+ µ)bc
∗
)τ(µ)]d
1
= 0,
где d
1
= [exp(A + σ
0
bc
∗
)τ
1
]d.
Из того факта, что плоскости {x
1
= 0} и L
2
пересекаются и мат-
рица Q имеет комплексные собственные значения, следует существо-
вание числа τ
2
такого, что
[exp(A + σ
0
bc
∗
)τ
2
]d
2
∈ L
2
, (13)
где d
2
= [exp(A + (σ
0
+ µ)bc
∗
)τ(µ)]d
1
(так как плоскость {x
1
= 0} —
инвариантна относительно A + σ
0
bc, то фазовый поток {f
t
} в этой
плоскости есть {e
Qt
} — семейство вращений (на угол ω
0
t) с одновре-
менным растяжением в e
λ
0
t
раз).
Таким образом, сначала на промежутке [0, τ
1
] фазовый поток {f
t
}
системы (12) переводит произвольный ненулевой вектор d ∈ M
1
в
вектор d
1
, принадлежащий плоскости π, натянутой на вектор b и еди-
ничный вектор (1, 0, 0)
∗
оси x
1
. Затем, переключаясь на траектории
системы ˙x = [A+(σ
0
+µ)bc
∗
]x, на промежутке (τ
1
, τ
1
+τ(µ)] фазовый
поток {g
t
} этой системы "переносит"вектор d
1
с плоскости π в вектор
d
2
на плоскости {x
1
= 0}. И, наконец, под действием опять фазового
потока {f
t
}(f
t
= e
Qt
) на промежутке (τ
1
+ τ (µ), τ
1
+ τ (µ) + τ
2
] век-
тор d
2
переводится в вектор, лежащий на пересечении {x
1
= 0}∪L
2
(рис.25).
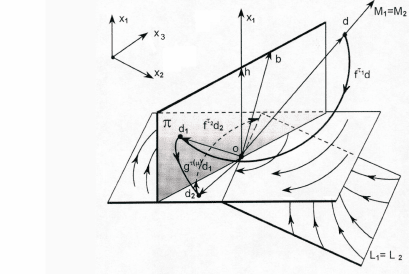
226
Рис.25. Отображение неустойчивого многообразия M
1
в устойчивое L
2
.
Так как все преобразования f
τ
1
, g
τ(µ)
, f
τ
2
линейны, то из включе-
ния (13) следует включение
f
τ
2
g
τ(µ)
f
τ
1
M
1
⊂ L
2
,
т.е. выполняется "условие вложения многообразий"(6) из § 4 с
θ
τ
0
= f
τ
2
g
τ(µ)
f
τ
1
, τ = τ
1
+ τ(µ) + τ
2
.
Здесь {θ
t
} — фазовый поток системы
˙x = (A + σ(t)bc
∗
)x (x ∈ R
n
),
где
σ(t) =
σ
0
при t ∈ [0, τ
1
),
σ
0
+ µ при t ∈ [τ
1
, τ
1
+ τ(µ)),
σ
0
при t ∈ [τ
1
+ τ(µ), τ
1
+ τ(µ) + τ
2
).
Итак, в силу основной теоремы из § 4 мы можем сформулировать
следующий результат.
Теорема 4. Пусть β 6= 0, γ < 0. Тогда для стабилизируемости
системы (10) необходимо и достаточно, чтобы β > 0.
227
ГЛАВА V
НЕСТАЦИОНАРНАЯ ВЫСОКОЧАСТОТНАЯ
СТАБИЛИЗАЦИЯ ЛИНЕЙНЫХ СИСТЕМ
§ 1. Постановка задачи
В этой главе рассматривается линейная система управления
˙x = Ax + bu, y = c
∗
x (1)
где A — вещественная постоянная (n × n)-матрица, b и c — одно-
столбцовые векторы: b, c ∈ R
n
, x = x(t) — n-мерный вектор состо-
яния (x ∈ R
n
), u = u(t) — скалярный вход (u ∈ R) и y = y(t) —
скалярный выход (y ∈ R).
В предыдущей главе было дано в ряде важных случаев решение
задачи нестационарной линейной стабилизации для системы (1) —
проблемы Брокетта — в классе кусочно–постоянных периодических
стабилизирующих функций s(t), т.е. была найдена такая обратная
связь
u = s(t)
∗
y, (2)
что замкнутая система (1), (2), т.е. система
˙x = (A + bs(t)
∗
c
∗
)x, x ∈ R
n
,
оказывалась асимптотически устойчивой. При этом период T функ-
ции s(t) был достаточно большим, т.е. нами была осуществлена низ-
кочастотная стабилизация системы (1) (и при более общей ситуации,
когда b и c тоже матрицы).
В работе [259] предложен подход к решению проблемы Брокетта
в другом классе стабилизирующих функций s(t), а именно, в клас-
се непрерывных периодических функций, у которых период доста-
точно мал (высокочастотная стабилизация). Эта методика отлична
от методики, рассмотренной в предыдущей главе и основывается на
процедурах усреднения.
228
Следует отметить, что этот подход использует идеи и методы,
применявшиеся ранее в теории управления колебаниями (см., на-
пример ([169,193,195,196,257]), в частности, при рассмотрении хоро-
шо известного явления стабилизации верхнего положения маятника,
когда точка подвеса совершает достаточно быстрые колебания в вер-
тикальном направлении (см. [23,31,77,114,128,169,235]).
Изложим указанный выше подход, применяемый для решения (в
частном случае, когда b, c ∈ R
n
) проблемы Брокетта, следуя работе
[259].
§ 2. Некоторые предварительные факты.
Приведем некоторые понятия и факты, которые будут использо-
ваны нами в дальнейшем.
1. Теорема об экспоненциальной устойчивости.
Пусть дана система
˙x = f (t, x), t ∈ R, x ∈ R
n
, f(t, 0) ≡ 0, (1)
где вектор-функция f(t, x) = (f
1
(t, x), ··· , f
n
(t, x))
∗
кусочно-непре-
рывна по t в интервале I
+
t
= {a
1
< t < +∞} (a ∈ R) и удовлетворяет
условию Липшица по переменным x
1
, ··· , x
n
во всем пространстве
R
n
, x = (x
1
, ··· , x
n
)
∗
.
О п р е д е л е н и е . Тривиальное р е ш е н и е x(t) ≡ 0 диффе-
ренциального уравнения (1) называется э к с п о н е н ц и а л ь н о у с-
т о й ч и в ы м при t → +∞ (см. [81]), если для каждого решения
x(t) ≡ x(t; t
0
, x
0
), x(t
0
) = x
0
, x
0
∈ R
n
этого уравнения справедливо
неравенство
kx(t)k ≤ N kx(t
0
ke
−α(t−t
0
)
при t ≥ t
0
,
где N и α — положительные постоянные, не зависящие от выбора
решения x(t).
Аналогично определяется экспоненциальная устойчивость нетри-
виального решения. А именно, решение ξ(t) экспоненциально устой-
чиво, если для любого решения x(t) ≡ x(t; t
0
, x
0
) справедливо нера-
венство
kx(t) − ξ(t)k ≤ N kx(t
0
) − ξ(t
0
)ke
−α(t−t
0
)
при t ≥ t
0
,

229
где N и α — положительные постоянные, не зависящие от выбора
решения x(t).
Очевидно, что из экспоненциальной устойчивости решения
x(t) ≡ 0 следует его асимптотическая устойчивость в целом. Обрат-
ное, вообще говоря, неверно. Примером может служить скалярное
уравнение
˙x = −
x
t
, x ∈ R, t ∈ [1, +∞).
Действительно, его общее решение имеет вид
x(t) =
x
0
t
, x
0
= x(1), (t
0
:= 1);
и, поэтому, нулевое решение x(t) ≡ 0 не является экспоненциально
устойчивым, хотя оно является асимптотически устойчивым.
Однако, для линейной системы с постоянными коэффициентами
положение иное: из асимптотической устойчивости ее тривиального
решения следует его экспоненциальная устойчивость.
Предложение 1. Если тривиальное решение линейной системы
˙x = Ax, x ∈ R
n
, (2)
с постоянной матрицей A асимптотически устойчиво (при
t → +∞), то эта система экспоненциально устойчива, т.е. каж-
дое ее решение экспоненциально устойчиво (при t → +∞).
Д о к а з а т е л ь с т в о. В силу теоремы 1 из § 1, гл.III тривиальное
решение x(t) ≡ 0 системы (2) асимптотически устойчиво тогда и
только тогда, когда матрица A гурвицева, т.е. все собственные числа
λ
j
(A) матрицы A имеют отрицательные вещественные части:
Re λ
j
(A) < 0 (j = 1, . . . , n).
Положим
α = −
1
2
max
j
Re λ
j
(A).
Тогда по лемме ( § 2, гл.I) об оценке нормы экспоненты имеем
ke
At
k ≤ N e
−αt
при t ≥ 0, (3)
где N — некоторая положительная константа.
230
Решение x(t) уравнения (2) с начальным условием x(t
0
) = x
0
да-
ется формулой
x(t) = e
(t−t
0
)A
x
0
,
где начальные данные t
0
∈ R, x
0
∈ R
n
произвольные.
Поэтому, с учетом оценки (3), получаем
kx(t)k ≤ N kx(t
0
)ke
−α(t−t
0
)
при t ≥ t
0
.
Пусть ξ(t) — любое решение системы (2). Тогда, учитывая, что
разность x(t) − ξ(t) тоже есть решение системы (2), будем иметь
kx(t) − ξ(t)k ≤ N kx(t
0
) − ξ(t
0
)ke
−α(t−t
0
)
при t ≥ t
0
.
Последнее соотношение доказывает предложение 1.
Почти очевидно следующее
Предложение 2. Линейная система
˙x = A(t)x, x ∈ R
n
,
с кусочно-непрерывной матрицей A(t) экспоненциально устойчива
тогда и только тогда, когда ее тривиальное решение x(t) ≡ 0 экс-
поненциально устойчиво.
Д о к а з а т е л ь с т в о аналогично доказательству теоремы 4 из § 1,
гл.III.
Приведем одно достаточное условие экспоненциальной устойчиво-
сти общей системы (1).
Сначала докажем следующее простое утверждение.
Лемма. Пусть
q(x) = x
∗
Qx (Q = Q
∗
),
— положительно определенная квадратичная форма, заданная в R
n
.
Тогда существуют положительные числа α < β такие, что
αkxk
2
≤ q(x) ≤ βkxk
2
.
Д о к а з а т е л ь с т в о. Форма q(x) положительна во всех точках
единичной сферы kxk = 1. Поскольку сфера компактна, а форма
q(x) непрерывна на ней, то точные нижняя и верхняя грани дости-
гаются, и, поэтому
0 < α ≤ q(x) ≤ β, для всех x ∈ {x : kxk = 1}, (4)