Леонов Г.А., Шумафов М.М. Проблемы стабилизации линейных управляемых систем
Подождите немного. Документ загружается.

211
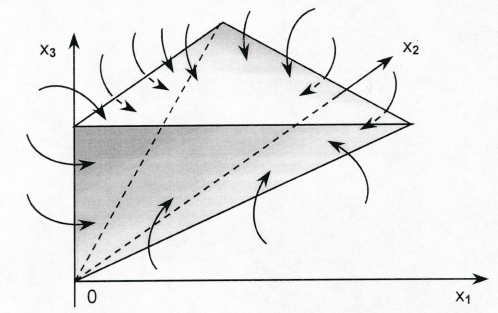
Рис.22. (Случай n = 3). Положительно инвариантное множество Ω.
Пусть решение x(t) системы (3) пересекает границу (размерности
n − 1)
∂Ω
j
= {x
j
= 0, x
i
> 0 ∀i 6= j , x
n
+ c
n−1
x
n−1
+ ··· + c
1
x
1
> 0}
(i, j = 1, ··· , n − 1)
множества Ω в момент t = τ , т.е. x(τ) ∈ ∂Ω
j
. Тогда
˙x
j
(τ) > 0. (4)
Действительно, при j = 1, 2, . . . , n − 2 имеем
˙x
j
(τ) = x
j+1
(τ) > 0.
При j = n − 1 (и n > 2)
˙x
n−1
(τ) = x
n
(τ) > −c
n−1
x
n−1
(τ) − ··· − c
1
x
1
(τ) ≥ 0,
так как c
k
≤ 0 (k = 1, . . . , n − 1) в силу условия 1) теоремы 1.
При n = 2 имеем
˙x
1
(τ) = x
2
(τ) > −c
1
x
1
(τ) ≥ 0
(так как c
1
≤ 0). Пусть теперь x(τ ) ∈ ∂Ω
0
, где
∂Ω
0
= {x
j
> 0 (j = 1, . . . , n − 1), x
n
+ c
n−1
x
n−1
+ ··· + c
1
x
1
= 0}
— оставшаяся (n − 1)-мерная граница множества Ω. Обозначим
V (x) = x
n
+ c
n−1
x
n−1
+ ··· + c
1
x
1
.
212
Тогда в силу системы (3) имеем
dV (x(t))
dt
|
t=τ
= −a
n
x
n
− ··· − a
1
x
1
+ c
n−1
x
n
+ ··· + c
1
x
2
=
= (c
n−1
− a
n
)x
n
(τ) + ··· + (c
1
− a
2
)x
2
(τ) − a
1
x
1
=
= (c
n−1
− a
n
)(−c
n−1
x
n−1
(τ) − ··· − c
1
x
1
(τ))+
+ ··· + (c
1
− a
2
)x
2
(τ) − a
1
x
1
(τ) =
= [−a
n−1
+ c
n−2
+ c
n−1
(a
n
− c
n−1
]x
n−1
(τ) + ···
··· + [−a
2
+ c
1
+ c
2
(a
n
− c
n−1
]x
2
(τ)+
+[−a
1
+ c
1
(a
n
− c
n−1
)]x
1
(τ)
(здесь мы использовали соотношение x
n
(τ) + c
n−1
x
n−1
(τ) + ··· +
c
1
x
1
(τ) = 0). Отсюда и из условия 2) теоремы 1 следует неравен-
ство
dV (x(t))
dt
|
t=τ
> 0. (5)
Из неравенств (4) и (5) следует, что граница ∂Ω множества Ω,
за исключением ее частей, имеющих размерность не больше, чем
n − 2, является бесконтактной по отношению к векторному полю,
определяемому системой (3) и решения системы (3) "прошивают"эту
границу снаружи вовнутрь множества Ω. Отсюда и из непрерывной
зависимости решений системы (3) от начальных данных следует по-
ложительная инвариантность множества Ω.
Так как ˙x
1
> 0 внутри множества Ω, то из положительной инвари-
антности Ω вытекает, что нулевое решение x(t) ≡ 0 и, следовательно,
сама система (3) не является асимптотически устойчивой ни при ка-
ком выборе функции s(t). Теорема 1 доказана.
Таким образом, необходимым условием стабилизации системы
(1) является нарушение хотя бы одного из условий 1) или 2) тео-
ремы 1.
Приведем теперь другое хорошо известное [16,17] достаточное усло-
вие неустойчивости системы вида (2).
Теорема 2. Если для линейной системы
˙x = P (t)x, t ∈ R, x ∈ R
n
, (6)
с кусочно–непрерывной матрицей P (t) выполнено неравенство
T r P (t) ≥ α > 0 ∀t ∈ R (7)
для некоторого положительного числа α, то система (6) неустой-
чива.
213
Если вместо условия (7) выполнено неравенство
T r P (t) ≥ 0,
то система (6) не является асимптотически устойчивой.
Д о к а з а т е л ь с т в о . Пусть
η
1
, . . . , η
n
— произвольная система линейно независимых векторов фазового
пространства R
n
и
ψ
1
(t) = ψ
1
(t; η
1
, t
0
), . . . , ψ
n
(t) = ψ
n
(t; η
n
, t
0
)
— фундаментальная система решений уравнения (6) (см. следствие
2 теоремы 1 из § 2), выходящих в момент t = t
0
из векторов {η
k
}
n
k=1
:
ψ
1
(t
0
) = η
1
, . . . , ψ
n
(t
0
) = η
n
.
Пусть W (t) – определитель Вронского фундаментальной матрицы
Ψ(t) решений {ψ
k
(t)}
n
k=1
:
W (t) = det Ψ(t), Ψ(t) = (ψ
1
(t), ··· , ψ
n
(t)).
Тогда по теореме Лиувилля
W (t) = W (t
0
) exp
t
Z
t
0
T r P (τ ) dτ
и, следовательно, в силу условия (7)
|W (t)| ≥ |W ( t
0
)|e
α(t−t
0
)
. (8)
Если система (6) была бы устойчивой, то для любого наперед задан-
ного шара S
ε
(с центром в начале координат) радиуса ε (ε > 0 —
произвольное число) существовал бы шар S
δ
радиуса δ такой, что
преобразование g
t
t
0
фазового пространства R
n
, осуществляемое тра-
екториями уравнения (6) за время от t
0
до t, переводило бы шар
S
δ
(с центром в начале координат) в множество g
t
t
0
S
δ
, лежащее при
любом t ≥ t
0
в шаре S
ε
, т.е.
g
t
t
0
S
δ
⊂ S
ε
∀t ∈ [t
0
, +∞). (9)
214
(g
t
0
t
0
S
δ
≡ S
δ
, напомним, что (см. п.1, § 2) g
t
t
0
x
0
= ψ(t; x
0
, t
0
)), где
ψ(t; x
0
, t
0
) — решение уравнения (6) с начальным условием
ψ(t
0
; x
0
, t
0
) = x
0
). Из (9) имеем:
µ(g
t
t
0
S
δ
) ≤ µ(S
ε
) ≤ C
n
ε
n
, (10)
где C
n
— некоторая константа (зависящая от размерности фазового
пространства), µ — мера соответствующего множества.
Возьмем теперь длины векторов
η
1
, . . . η
n
настолько малыми, что-
бы параллелепипед Σ
0
, натянутый на векторы η
1
, . . . , η
n
, лежал в
шаре S
δ
: Σ
0
⊂ S
δ
. Так как g
t
t
0
: R
n
→ R
n
линейное преобразование
(см. следствие 3 теоремы 1 из § 2), то образ g
t
t
0
Σ
0
параллелепипеда
Σ
0
тоже есть параллелепипед Σ
t
, объем µ(Σ
t
) которого равен
µ(Σ
t
) = |det (g
t
t
0
η
1
, . . . , g
t
t
0
η
n
)| = |det Ψ(t)| = |W (t)|, (11)
т.е. значению в момент t модуля определителя Вронского.
Поскольку Σ
0
⊂ S
δ
, то в силу (9)
Σ
t
⊂ S
ε
(Σ
t
= g
t
t
0
Σ
0
) ∀t ≥ t
0
,
и, поэтому, используя (10), (11), получаем
|W (t)| = µ(Σ
t
) ≤ C
n
ε
n
∀t ≥ t
0
.
Отсюда следует, что функция |W (t)| ограничена на промежутке
[t
0
, +∞). С другой стороны, из соотношения (8) следует, что
|W (t)| → +∞ при t → +∞. Полученное противоречие доказывает
первую часть теоремы 2.
Вторая часть теоремы 2 доказывается аналогично. Действительно,
асимптотическая устойчивость системы (6) означала бы, что кроме
условия (9), для векторов η
1
, . . . , η
n
∈ R
n
выполняются еще соотно-
шения:
g
t
t
0
η
1
→ 0, . . . , g
t
t
0
η
n
→ 0
при t → +∞ и, следовательно, в силу (11)
|W (t)| → 0 при t → +∞
вопреки неравенству
|W (t)| ≥ |W (t
0
)|,
которое следует из формулы Лиувилля в силу условия T r P (t) ≥ 0.
Теорема 2 доказана полностью.

215
Следствие. Система (2) неустойчива, если
T r (A + s(t)bc
∗
) ≥ α > 0 ∀t ∈ R
(α – некоторое число), и не является асимптотически устойчивой,
если
T r (A + s(t)bc
∗
) ≥ 0 ∀t ∈ R.
§ 9. Низкочастотная стабилизация двумерных
и трехмерных систем
Применим полученные в предыдущих параграфах результаты к
двумерным и трехмерным системам.
1. Двумерные системы. Рассмотрим систему со скалярным вхо-
дом u(t) и скалярным выходом y(t), передаточная функция которой
равна
W (p) =
c
2
p + c
1
p
2
+ a
2
p + a
1
, (1)
где a
1
, a
2
; c
1
, c
2
— некоторые вещественные числа.
Будем предполагать, что c
2
6= 0. Тогда, не умаляя общности, мож-
но считать, что c
2
= 1. Предположим также, что функция W (p)
невырождена, т.е.
c
2
1
− a
2
c
1
+ a
1
6= 0. (2)
Тогда систему с передаточной функцией (1) можно реализовать (в
силу следствия теоремы 2 из § 3, гл.II) в фазовом пространстве R
2
как систему вида (1) из § 1:
½
˙x
1
= x
2
,
˙x
2
= −a
1
x
1
− a
2
x
2
− u, y = c
1
x
1
+ x
2
.
(3)
Здесь
A =
µ
0 1
−a
1
−a
2
¶
, b =
µ
0
−1
¶
, c =
µ
c
1
1
¶
, x =
µ
x
1
x
1
¶
.
Из условий Рауса–Гурвица (см. § 2, гл.III)вытекает, что стационар-
ная стабилизация системы (2) с помощью обратной связи
u = s
0
y, s
0
= const 6= 0 возможна тогда и только тогда, когда
a
2
+ s
0
> 0, a
1
+ c
1
s
0
> 0.
216
Легко вывести, что для существования числа s
0
, удовлетворяющего
последним неравенствам, необходимо и достаточно выполнения либо
условия c
1
> 0, либо соотношений c
1
≤ 0, a
2
c
1
< a
1
.
Рассмотрим случай, когда стационарная стабилизация невозмож-
на:
c
1
≤ 0, a
2
c
1
≥ a
1
. (4)
Применим теорему из § 5 к системе (3). Условие 1) этой теоремы
выполнено для s
0
6= 0:
det bs
∗
0
c
∗
= s
0
det bc
∗
= 0
T r bs
∗
0
c
∗
= s
0
T r bc
∗
= s
0
c
∗
b = −s
0
6= 0.
Условие 2) этой же теоремы будет выполнено, если при некотором
σ
0
∈ R характеристический многочлен
p
2
+ (a
2
+ σ
0
)p + (a
1
+ c
1
σ
0
)
системы (2), где u = σ
0
y имеет комплексно сопряженные корни. Лег-
ко видеть, что для существования такого числа σ
0
необходимо и до-
статочно выполнения неравенства
c
2
1
− a
2
c
1
+ a
1
> 0. (5)
Таким образом, если выполнено неравенство (5), то в силу теоремы
из § 5 существует такая обратная связь u = s(t)y, где s(t) — кусочно-
постоянная периодическая функция, что система (3), где u = s(t)y,
асимптотически устойчива.
Этот же результат можно получить и с помощью теоремы 2 из § 7.
Для этого, не умаляя общности, можно предположить, что a
2
> 0.
Этого всегда можно достичь выбором s
0
в выражении (правой части
второго уравнения системы (3), где u = s(t)y)
−(a
2
+ s
0
)x
2
− (a
1
+ c
1
s
0
)x
1
− (s(t) − s
0
)(c
1
x
1
+ x
2
)
и переобозначениями
a
2
+ s
0
→ a
2
, a
1
+ c
1
s
0
→ a
1
, s(t) − s
0
→ s(t).
Заметим, что, тогда из условия (2) и неравенств (4) вытекает, что
a
1
> 0.
Из неравенства a
2
> 0 и соотношений (4) следует, что матрица A
в системе (2) имеет вещественные собственные числа −λ и κ разных

217
знаков: −λ < 0, κ > 0, причем λ > κ (так как −λ + κ = −a
2
< 0).
Далее, условие (13) в теореме 2 (§ 7) принимает здесь вид
κ + λ
κ + c
1
< 1.
(В силу (2) κ 6= −c
1
.)
Отсюда получаем, что все условия теоремы 2 из § 7 выполнены,
если
(λ − c
1
)(κ + c
1
) = −c
2
1
+ a
2
c
1
− a
1
< 0.
Это неравенство совпадает с неравенством (5).
Если выполнено неравенство
c
2
1
− a
2
c
1
+ a
1
< 0,
то, как легко видеть, выполнены условия теоремы 1 из § 8 и, тем
самым, система (3) не может быть стабилизируема ни при какой
обратной связи u = s(t)y.
Итак, нами получен следующий результат.
Теорема 1. Пусть передаточная функция W (p) системы (3) невы-
рождена, т.е. выполнено неравенство (2).
Тогда необходимым и достаточным условием стабилизируемо-
сти системы (3) является выполнение хотя бы одного из условий:
1) c
1
> 0 или 2) c
1
≤ 0, c
2
1
− a
2
c
1
+ a
1
> 0. (6)
При этом в стабилизирующем управлении u = s(t)y, функцию s(t)
можно выбрать кусочно-постоянной периодической с достаточно
большим периодом (низкочастотная стабилизация).
Замечание 1. В следующей главе V будет показано с помощью
процедуры усреднения, что условия 1), 2) теоремы 1 также необхо-
димы и достаточны в другом классе стабилизирующих функций s(t)
вида
s(t) = s
0
+ s
1
ω cos ωt (s
0
, s
1
∈ R),
где ω — достаточно большое число (высокочастотная стабилизация).

218
Замечание 2. Теорема 1 очень хорошо иллюстрирует как введе-
ние функции s(t) 6≡ s
0
, s
0
= const, в обратной связи u = s(t)y (неста-
ционарная стабилизация) расширяет возможности стационарной ста-
билизации (s(t) ≡ s
0
): в пространстве параметров {(a
1
, a
2
; c
1
)} си-
стемы (3) условия (6) выделяют более широкую область, чем об-
ласть, определяемая условиями Рауса-Гурвица (c
1
> 0 или c
1
≤ 0,
a
2
c
1
< a
1
) при стационарной стабилизации.
2. Трехмерные системы.
1) Пусть передаточная функция системы (3) со скалярным входом
u(t) и скалярным выходом y(t) имеет вид:
W (p) =
1
p
3
+ αp
2
+ βp + γ
, (7)
где α, β, γ — некоторые вещественные числа. (Очевидно, функция
W (p) невырождена). Тогда такую систему (в силу следствия теоремы
2 из § 3 гл.II) можно реализовать в фазовом пространстве R
3
как
систему вида (1) из § 1:
˙x = x
2
,
˙x
2
= x
3
,
˙x
3
= −(αx
3
+ βx
2
+ γx
1
) − u, y = x
1
.
(8)
Стационарная стабилизация u = s
0
y системы (8) возможна тогда
и только тогда, когда
α > 0 и β > 0.
(это следует из условий Рауса–Гурвица).
Пусть α > 0, β ≤ 0 (в этом случае стационарная стабилизация
невозможна). Применим здесь теорему 4 из § 7.
Выберем σ
0
> 0 так, чтобы характеристический многочлен систе-
мы (8), где u = σ
0
y, имел вид:
p
3
+ αp
2
+ βp + (γ + σ
0
) = (p − κ
0
)(p
2
+ α
0
p + β
0
),
где α
0
= α + κ
0
, β
0
= β + κ
0
(α + κ
0
), κ
0
< 0, причем
σ
0
= −κ
2
0
(α + κ
0
) − βκ
0
− γ.
219
При достаточно большом σ
0
и, значит, — κ
0
многочлен p
2
+ α
0
p + β
0
имеет два комплексных корня λ
0
± iω
0
, где λ
0
> 0, а исходный ха-
рактеристический многочлен — один отрицательный κ
0
и два ком-
плексных корня λ
0
± iω
0
.
Аналогично, возьмем s
1
< 0 так, чтобы характеристический мно-
гочлен системы (8), где u = s
1
y, принял вид:
p
3
+ αp
2
+ βp + (γ + s
1
) = (p − κ
1
)(p
2
+ α
1
p + β
1
),
где α
1
= α + κ
1
, β
1
= β + κ
1
(α + κ
1
), κ
1
> 0, причем
s
1
= −κ
2
1
(α + κ
1
) − βκ
1
− γ.
При достаточно большом |s
1
| и, значит, κ
1
многочлен p
2
+ α
1
p + β
1
имеет два комплексных корня −λ
1
±iω
1
, где λ
1
= (α + κ
1
)/2, причем
λ
1
> 0, а характеристический многочлен — один положительный и
два комплексных корня −λ
1
± iω
1
.
Наконец, аналогично как и выше, возьмем s
2
настолько большим,
чтобы для характеристического многочлена системы (8), где u = s
2
y,
выполнялось равенство
p
3
+ αp
2
+ βp + (γ + s
2
) = (p + λ
2
)(p
2
+ α
2
p + β
2
),
где α
2
= α − λ
2
, β
2
= β − λ
2
(α − λ
2
), и, тем самым, этот многочлен
при достаточно большом λ
2
будет иметь один отрицательный корень
−λ
2
< 0 и два комплексных корня κ
2
±iω
2
, причем κ
2
=
(λ
2
−α)
2
> 0.
Таким образом, здесь (см. теорему 4 из § 7)
dim M
1
= dim L
2
= 1, dim M
2
= dim L
1
= 2
λ
1
=
α + κ
1
2
, κ
2
=
λ
2
− α
2
λ
1
λ
2
− κ
1
κ
2
=
1
2
α(λ
2
+ κ
1
) > 0.
Следовательно, выполнены все условия теоремы 4 из § 7. Поэтому
при α < 0, β ≤ 0 существует такое управление u = s(t)y, где s(t) —
кусочно-постоянная периодическая функция с достаточно большим
периодом, что система (8), где u = s(t)y, асимптотически устойчива.
Поскольку для системы (8) (u = s(t)y)
T r (A + bs(t)
∗
c
∗
) = −α ∀t ∈ R,
то в силу теоремы 2 из § 8 система (8) (u = s(t)y) не является асимп-
тотически устойчивой при α ≤ 0.
Таким образом, получаем следующий результат.

220
Теорема 2. Система (8) с передаточной функцией (7) стабили-
зируема тогда и только тогда, когда α > 0. При этом функцию s(t)
в стабилизирующем управлении u = s(t)y можно выбрать кусочно-
постоянной периодической с достаточно большим периодом (низ-
кочастотная стабилизация).
Замечание 1. В гл.V будет показана возможность высокочастот-
ной стабилизации системы (8) в другом классе функций вида
s(t) = s
0
+ s
1
ω
2
cos ωt (s
0
, s
1
∈ R),
где ω — достаточно большое число. При этом оказывается, что, как
и здесь, условие α > 0 необходимо и достаточно для стабилизируе-
мости системы (8).
Замечание 2. Как и теорема 1, теорема 2 хорошо иллюстриру-
ет преимущества нестационарной стабилизация (условие α > 0) по
сравнению со стационарной (условия α > 0, β > 0).
2) Рассмотрим систему со скалярным входом u(t) и скалярным
выходом y(t) и передаточной функцией вида
W (p) =
p
p
3
+ αp
2
+ βp + γ
,
где α, β и γ — некоторые вещественные числа. Будем считать, что
γ 6= 0 (условие невырожденности функции W (p)). Тогда эту систе-
му можно реализовать (в силу следствия теоремы 2 из § 3, гл.II) в
фазовом пространстве R
3
как систему
˙x
1
= x
2
,
˙x
2
= x
3
,
˙x
3
= −(αx
3
+ βx
2
+ γx
1
) − u, y = x
2
.
(9)
Из условий Рауса–Гурвица выводим, что стационарная стабилизация
u = s
0
y системы (9) возможна в том и только том случае, когда
α > 0, γ > 0.
Рассмотрим случай α > 0, γ < 0 (тогда стационарная стабилизация
невозможна). Применим здесь теорему 1 из § 7 с
s
1
= s
2
; λ
1
= λ
2
= λ, κ
1
= κ
2
= κ.