Леонов Г.А., Шумафов М.М. Проблемы стабилизации линейных управляемых систем
Подождите немного. Документ загружается.

181
Для доказательства теоремы 2 достаточно определить функцию
s(t) следующим образом:
s(t) =
s
0
при t ∈ [0, |σ
0
τ
j
/2s
0
|),
σ
0
при t ∈ [|σ
o
τ
j
/2s
0
|, τ
j
+ |σ
0
τ
j
/2s
0
|), s(t + T ) = s(t),
s
0
при t ∈ [τ
j
+ |σ
0
τ
j
/2s
0
|, τ
j
+ |σ
0
τ
j
/s
0
|),
(20)
где T : = τ
j
(1 −σ
0
/s
0
) — период функции s(t). Здесь τ
j
— достаточно
большое число, удовлетворяющее условию (19). Легко проверить, что
функция s(t) имеет нулевое среднее на периоде. Далее, доказатель-
ство теоремы 2 полностью повторяет рассуждения доказательства
теоремы 1. При этом
t
1
= t
2
:= −σ
0
τ
j
/2s
0
, τ := τ
j
.
Замечание 1. Условие ограниченности функции kθ
t
k на [0, +∞)
можно заменить следующим условием: все собственные значения λ
j
матрицы A + b(cσ
0
)
∗
обладают неположительными вещественными
частями:
Re λ
k
(A + b(cσ
0
)
∗
) ≤ 0 (k = 1, . . . , n),
причем собственные числа, имеющие нулевые вещественные части,
допускают лишь простые элементарные делители т.е. соответствую-
щие клетки в жордановой нормальной форме матрицы сводятся к
одному элементу.
Замечание 2. Теорема из § 3 является следствием теоремы 2.
Действительно, применим теорему 2 к системе (4) из § 3 с функци-
ей s(t) вида (5) в предположении, что выполнено условие α
2
< 4
(β −ν
2
0
) (не умаляя общности будем считать, что β −ν
2
0
−α
2
/4 = 1 ).
Тогда характеристический многочлен системы (4) из § 3 с s(t) = σ
0
,
где σ
0
= β, имеет комплексно-сопряженные корни и, следовательно,
выполнено условие (19) с некоторым τ
1
> 0 ({θ
t
} — фазовый поток
системы (7) из § 3). Поэтому τ
j
:= τ
1
+ 2πj, j ∈ Z. Легко видеть,
что функция kθ
t
k ограничена на [0, +∞), так как преобразование θ
t
аффинно эквивалентно повороту на угол t с последующим сжатием.
Далее, при s(t) = s
0
, где s
0
:= −β, характеристический многочлен
системы (4)(§ 3) имеет вещественные корни −λ < 0 и κ > 0, причем
λ > κ.
182
Таким образом, выполнены все условия теоремы 2 и, следователь-
но, система (4) (из § 3) с функцией s(t) вида (20) асимптотически
устойчива (при этом T = 2τ
j
).
§ 5. Некоторые предложения, обеспечивающие
эффективную проверку "условия вложения многообразий"
Рассмотрим систему
˙z = Qz, z ∈ R
n
, (1)
где Q — постоянная неособая (n × n)–матрица.
Пусть h ∈ R
n
— произвольный ненулевой вектор.
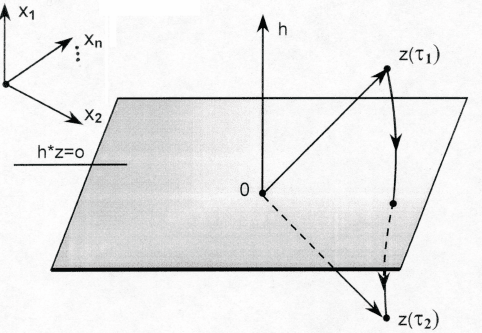
Лемма 1. Предположим, что решение z(t) системы (1) имеет
вид
z(t) = v(t) + w(t), t ∈ [0, +∞),
где v(t) — периодическая вектор-функция такая, что h
∗
v(t) 6≡ 0, w(t)
— вектор-функция, для которой
+∞
Z
0
kw(τ)kdτ < +∞, lim
t→+∞
w(t) = 0.
Тогда существуют числа τ
1
и τ
2
такие, что выполнены неравенства
h
∗
z(τ
1
) > 0, h
∗
z(τ
2
) < 0, (2)
т.е. функция h
∗
z(t) меняет свой знак (рис.18).
183
Рис. 18. Переход решения z(t) с одной стороны плоскости h
∗
z = 0
на другую.
Д о к а з а т е л ь с т в о . Предположим противное, т.е. что
h
∗
z(t) ≥ 0 ∀t ≥ 0 или h
∗
z(t) ≤ 0 ∀t ≥ 0. Пусть, для определенности,
h
∗
z(t) ≥ 0 ∀t ≥ 0. Тогда и h
∗
v(t) ≥ ∀t ≥ 0. Действительно, в про-
тивном случае существует момент t
0
такой, что h
∗
v(t
0
) < 0 и в силу
периодичности h
∗
v(t) будем иметь
h
∗
z(t
0
+ nT ) = h
∗
v(t
0
) + h
∗
w(t
0
+ nT ) < 0
для достаточно больших n ∈ N (здесь T — период функции v(t)).
Отсюда, в силу условия h
∗
v(t) 6≡ 0, следует, что
+∞
Z
0
h
∗
v(τ)dτ = +∞,
так как h
∗
v(t) — периодическая функция.
Поэтому будет выполнено также соотношение
lim
t→+∞
t
Z
0
h
∗
z(τ )dτ = +∞. (3)
184
С другой стороны
t
Z
0
h
∗
z(τ )dτ =
t
Z
0
h
∗
Q
−1
˙z(τ )dτ = h
∗
Q
−1
(z(t) − z(0)).
Отсюда и из ограниченности функции z(t) на [0, +∞) следует огра-
ниченность функции
t
Z
0
h
∗
z(τ )dτ.
Последнее противоречит соотношению (3). Полученное противоре-
чие доказывает лемму 1.
Следствие. Пусть решение z(t) системы ˙z = P z с постоянной
(не обязательно неособой) (n × n)–матрицей P имеет вид
z(t) = e
λt
[v(t) + w(t)],
где число λ не является собственным значением матрицы P, а v(t)
и w(t) удовлетворяют условиям леммы 1. Тогда справедливо утвер-
ждение леммы 1, т.е. имеют место неравенства (2).
Для доказательства следствия достаточно заметить, что функ-
ция ζ(t) = e
−λt
z(t) является решением уравнения
˙
ζ = (P − λI)ζ
(где I — единичная матрица) и, тогда остается применить лемму 1
к последнему уравнению, полагая Q := P − λI.
Лемма 2. Пусть n = 2 и матрица Q в (1) имеет комплексно-
сопряженные собственные значения α ± iβ.
Тогда для любой пары ненулевых векторов h ∈ R
2
и d ∈ R
2
суще-
ствуют числа τ
1
и τ
2
такие, что
h
∗
e
Qτ
1
d > 0, h
∗
e
Qτ
2
d < 0, (4)
т.е. решениеz(t) = e
Qt
d системы (1) попадает на плоскость
{h
∗
z} = 0 в некоторый момент τ ∈ (τ
1
, τ
2
).
Д о к а з а т е л ь с т в о . В рассматриваемом случае фазовый
поток {g
t
} системы (1) аффинно эквивалентен семейству растяже-
ний (если α < 0, то вместо растяжений имеем сжатия) в e
αt
раз с
одновременным вращением на угол β.
185
Поэтому, очевидно, для любого вектора d ∈ R
2
существуют такие
числа τ
1
и τ
2
, что
h
∗
g
τ
1
d > 0, h
∗
g
τ
2
d < 0.
Так как
z(t; d) = e
Qt
d, d ∈ R
2
,
— решение системы (1) с начальным условием z(0; d) = d, то
(см. п.1,§ 2)
g
t
= e
Qt
.
Следовательно, имеют место неравенства (4). Лемма 2 доказана.
Следующая лемма является обобщением леммы 2.
Лемма 3. Пусть матрица Q имеет пару комплексно-сопряжен-
ных собственных чисел α ± iβ кратности 1, а остальные ее соб-
ственные числа λ
j
(Q) удовлетворяют условию Re λ
j
(Q) < α (j =
1, ··· , n − 2).
Пусть, далее, для векторов h ∈ R
n
и d ∈ R
n
выполнены неравен-
ства
det(d, Qd, . . . , Q
n−1
d) 6= 0, (5)
det(h, Q
∗
h, . . . , (Q
∗
)
n−1
h) 6= 0. (6)
Тогда существуют числа τ
1
и τ
2
такие, что
h
∗
e
Qτ
1
d > 0, h
∗
e
Qτ
2
d < 0, (7)
т.е. решение x = e
Qt
d системы (1) попадает на плоскость
{h
∗
z = 0} в некоторый момент t = τ ∈ (τ
1
, τ
2
).
Напомним, что условия (5) и (6) — это условия полной управляе-
мости пары (Q, d) и полной наблюдаемости пары (Q, h).
Д о к а з а т е л ь с т в о л е м м ы 3. В силу условий леммы 3
решение
z(t) = e
Qt
d
системы (1) можно представить в виде
z(t) = e
αt
v(t) +
X
j
e
λ
j
t
p
j
(t), (8)
186
где каждая компонента вектор-функции v(t) имеет вид c
1
cos βt +
c
2
sin βt (c
1
, c
2
— константы), и, поэтому, v(t) — периодическая функ-
ция; p
j
(t) — вектор-функция, каждая компонента которой есть неко-
торый многочлен от t (в частности, константа).
Перепишем (8) в форме
z(t) = e
αt
(v(t) + w(t)),
где
w(t) =
X
j
e
(λ
j
−α)t
p
j
(t).
Очевидно, функции v(t) и w(t) удовлетворяют условиям леммы 1.
Далее, из условий (5) (полной управляемости пары (Q, d)) и (6)
(полной наблюдаемости пары (Q, h)) следует соотношение h
∗
v(t) 6≡ 0.
Теперь, применяя следствие леммы 1, получим что справедливы
неравенства (7). Лемма 3 доказана.
Рассмотрим систему (8) из § 4 при n = 2, т.е. систему
˙x = (A + bs(t)
∗
c
∗
)x, x ∈ R
2
, (9)
где периодическая матрица s(t) имеет вид (9) (§ 4).
Из теоремы § 4 и леммы 2 вытекает следующая
Теорема. Пусть для системы (9) существуют матрицы s
0
и σ
0
,
удовлетворяющие следующим условиям:
1) det bs
∗
0
c
∗
6= 0, T r bs
∗
0
c
∗
6= 0;
если det bs
∗
0
c
∗
= 0, то пусть выполняется хотя бы одно из нера-
венств
det A 6= 0 или det(a
1
, r
2
) + det(r
1
, a
2
) 6= 0,
где a
1
, a
2
и r
1
, r
2
— первый и второй столбцы матриц A и bs
∗
0
c
∗
соответственно:
A = (a
1
, a
2
), bs
∗
0
c
∗
= (r
1
, r
2
).
2) матрица A + bσ
0
c имеет комплексно-сопряженные собствен-
ные числа.
Тогда существует периодическая матрица
s
(
t
)
такая, что си-
стема (9) асимптотически устойчива.
Д о к а з а т е л ь с т в о . Положим в формуле (9) из § 4
s
1
= s
2
= µs
0
, σ(t) ≡ σ
0
,
187
где |µ| — достаточно большое число и T r µbs
∗
0
c
∗
< 0. Из последнего
неравенства следует, что (при достаточно большом |µ| )
T r (A + µbs
∗
0
c
∗
) < 0. (10)
Пусть λ и κ — собственные числа матрицы A + µbs
∗
0
c
∗
. Тогда в силу
(10) λ + κ < 0. Следовательно, одно из чисел λ, κ отрицательно,
скажем λ. Если det bs
∗
0
c
∗
6= 0, то при достаточно большом |µ|
det(A + µbs
∗
0
c
∗
) 6= 0.
Последнее соотношение имеет место и тогда, когда det bs
∗
0
c
∗
= 0.
Действительно, в этом случае (по условию теоремы), как легко ви-
деть, квадратичная функция ϕ(ε) = det(bs
∗
0
c
∗
+ εA) отлична от нуля
для всех достаточно малых ε и, значит, при достаточно большом
|µ| ϕ(1/µ) 6= 0. Следовательно, λκ 6= 0, т.е. κ 6= 0. В зависимости
от знака κ особая точка x = 0 системы (9), где s(t) ≡ s
0
или седло
(если κ > 0 ), или устойчивый узел (если κ < 0 ).
В любом случае система (9), где s(t) ≡ s
0
, имеет одномерные ин-
вариантные устойчивое многообразие L
1
(соответствующее собствен-
ному числу λ < 0) и ( устойчивое или неустойчивое) многообразие
M
1
(соответствующее собственному числу κ ). Поэтому для этой си-
стемы выполнены условия (3), (4) и (7) из § 4 с λ
1
= λ
2
= −λ, κ
1
=
κ
2
= κ (L
1
≡ L
2
, M
1
≡ M
2
). Заметим, что если κ < 0, то система
(9) будет, очевидно, асимптотически устойчива.
В силу леммы 2 и условия 2) теоремы для системы (9), где
s(t) ≡ s
0
, выполнено "условие вложения многообразий"(6) из § 4.
Итак, выполнены все условия основной теоремы из § 4 и, следо-
вательно, система (9) с функцией s(t) вида (9) (§ 4), где s
1
= s
2
=
s
0
, σ(t) ≡ σ
0
, асимптотически устойчива. Теорема доказана.
188
§ 6. Стабилизация линейной системы в скалярном случае
(когда вход и выход — скалярные функции)
Рассмотрим теперь важный для теории управления случай, когда
в системе
˙x = Ax + bu, y = c
∗
x, x ∈ R
n
, (1)
(A — вещественная (n × n) -матрица), b и c — одностолбцовые n-
мерные векторы (вход u и выход y являются скалярными функция-
ми).
Всюду в дальнейшем будем предполагать, что передаточная функ-
ция W (p) = c
∗
(A−pI)
−1
b системы (1) невырождена. В силу теоремы
2 из § 3, гл.II, это означает, что пара (A, b) полностью управляема, а
пара (A, c) полностью наблюдаема.
Вначале докажем две леммы, устанавливающие полную наблюда-
емость и полную управляемость системы
˙x = (A + µbc
∗
)x, x ∈ R
n
, (2)
где µ 6= 0 — параметр, обладающий (n − 1)-мерным и одномерным
интегральными многообразиями.
Лемма 1. Если гиперплоскость {x ∈ R
n
: h
∗
x = 0}, где
h ∈ R
n
, h 6= 0 — интегральное многообразие для системы (2), то
пара (A, h) полностью наблюдаема.
Д о к а з а т е л ь с т в о . Предположим противное — пара
(A, h) неполностью наблюдаема. Тогда в силу теоремы двойственно-
сти Калмана (см.§ 3, гл.II) пара (A
∗
, h) неполностью управляема и,
следовательно, не выполнено свойство (V I
у
) полной управляемости
(см. § 1, гл.II ), т.е. существуют ненулевой вектор ξ ∈ C
n
= CR
n
и
число λ ∈ C такие, что
h
∗
ξ = 0, Aξ = λξ (ξ 6= 0). (3)
Из полной наблюдаемости пары (A, c) следует неравенство c
∗
ξ 6= 0.
Действительно, в противном случае мы имели бы неполностью на-
блюдаемую пару (A, c).
Так как {h
∗
x = 0} — интегральное многообразие для системы (2),
то векторное поле, определяемое системой (2), ортогонально вектору
h, т.е.
h
∗
(A + µbc
∗
)x = 0 ∀x ∈ {h
∗
x = 0}
189
(подпространство {h
∗
x = 0} ⊂ R
n
инвариантно относительно опера-
тора A + µbc
∗
). Отсюда следует, что
h
∗
(A + µbc
∗
)
k
x = 0, k = 1, 2, . . . ,
для всех x ∈ {h
∗
x = 0} ⊂ R
n
.
Из последних равенств выводим, что имеют место также соотно-
шения
h
∗
(A + µbc
∗
)
k
z = 0, k = 1, 2, . . . ,
для всех z из комплексной гиперплоскости
{z ∈ CR
n
: h
∗
z = 0} (z = x + iy, x, y ∈ R
n
).
При k = 1 и z = ξ, в силу (3), получим
0 = h
∗
Aξ + µh
∗
bc
∗
ξ = µh
∗
bc
∗
ξ.
Отсюда h
∗
b = 0 (так как c
∗
ξ 6= 0).
При k = 2 и z = ξ, используя (3) и предыдущее равенство, будем
иметь
0 = h
∗
(A + µbc
∗
)
2
ξ = λh
∗
(A + µbc
∗
)ξ + µh
∗
(A + µbc
∗
)bc
∗
ξ =
= µ(h
∗
Ab + µh
∗
bc
∗
b)c
∗
ξ = µ(h
∗
Ab)c
∗
ξ.
Отсюда h
∗
Ab = 0, так как µ 6= 0, c
∗
ξ 6= 0.
Продолжая этот процесс далее, получим равенства h
∗
A
k
b = 0
(k = 0, . . . , n −1). Из полной управляемости пары (A, b) следует, что
(см.§ 1, гл.II) векторы
b, Ab, . . . , A
n−1
b
линейно независимы и, следовательно, из предыдущих равенств сле-
дует, что h = 0. Полученное противоречие доказывает, что предпо-
ложение о полной ненаблюдаемости пары (A, h) не верно. Лемма 1
доказана.
Лемма 2. Если прямая {αd}, α ∈ R, d ∈ R
n
, (d 6= 0) — инте-
гральное многообразие для системы (2), то пара (A, d) полностью
управляема.
Д о к а з а т е л ь с т в о . Из условия леммы 2 следует, что
прямая {α d} — одномерное инвариантное подпространство относи-
тельно оператора A + µbc
∗
, т.е.
(A + µbc
∗
)x = α
1
d,
190
если x = αd (α, α
1
∈ R). Отсюда получаем
(A + µbc
∗
)
k
d = α
k
1
d, (4)
где k = 0, 1, 2, . . .. Из полной наблюдаемости пары (A, c) имеем
c
∗
d 6= 0. Действительно, в противном случае имели бы
Ad + (A + µbc
∗
)d = α
1
d,
т.е. Ad = α
1
d и c
∗
d = 0, что противоречит полной наблюдаемости
пары (A, c). Поэтому для вектора z ∈ R
n
такого, что
z
∗
d = 0, z
∗
Ad = 0, ··· , z
∗
A
n−1
d = 0, (5)
будем иметь из (4) последовательно при k = 1, 2, . . . , n − 1:
0 = α
1
z
∗
d = z
∗
(A + µbc
∗
)d = µz
∗
bc
∗
d.
Отсюда z
∗
b = 0, так как c
∗
d 6= 0. Далее, используя последнее равен-
ство, получаем
0 = α
2
1
z
∗
d = z
∗
(A + µbc
∗
)
2
d = z
∗
A
2
d + µz
∗
bc
∗
Ad+
+µz
∗
Abc
∗
d + µ
2
z
∗
bc
∗
bc
∗
d = µz
∗
Abc
∗
d.
Отсюда z
∗
Ab = 0 (так как µ 6= 0 и c
∗
d 6= 0 ).
Продолжая этот процесс далее, получим равенства
z
∗
b = 0, z
∗
Ab = 0, . . . , z
∗
A
n−1
b = 0.
Из последних равенств и полной управляемости пары (A, b) следует,
что z = 0.
Таким образом, из соотношений (5) имеем z = 0. Это означает,
что пара (A, d) полностью управляема. Лемма 2 доказана.
Следующая теорема устанавливает стабилизируемость системы (1)
с помощью обратной связи
u
=
s
(
t
)
y,
(6)
где s(t) — кусочно-постоянная периодическая функция с достаточно
большим периодом T .
Теорема. Пусть для системы (1) выполнены предположения ос-
новной теоремы из § 4, причем
dim M
1
= 1, dim L
2
= n − 1