Леонов Г.А., Шумафов М.М. Проблемы стабилизации линейных управляемых систем
Подождите немного. Документ загружается.

161
Следующая теорема устанавливает критерий асимптотической ус-
тойчивости неподвижной точки x = 0 произвольного (не обязательно
H) линейного отображения.
Теорема 4 (Критерий асимптотической устойчивости ли-
нейного отображения .) Для асимптотической устойчивости
неподвижной точки x = 0 произвольного линейного отображения
F : R
n
→ R
n
необходимо и достаточно, чтобы все его собственные
значения ρ
j
лежали внутри единичного круга |p| < 1 (p ∈ C).
Д о к а з а т е л ь с т в о . Пусть Φ — матрица линейного отобра-
жения F в базисе {e
i
}
n
i=1
.
1. Дадим сначала оценку нормы матрицы Φ
k
, k ∈ N. Пусть
ρ
1
, ··· , ρ
n
— собственные числа матрицы Φ с учетом их кратностей.
Приведем матрицу Ψ к жордановой нормальной форме
J = SΦS
−1
= diag [J
1
(ρ
1
), ··· , J
m
(ρ
m
)] (m ≤ n), (24)
где
J
j
(ρ
j
) =
ρ
j
1 0 ··· 0
0 ρ
j
1 ··· 0
.
.
.
.
.
.
0 0 0
.
.
.
1
0 0 0 ··· ρ
j
(j = 1, ··· , m) (25)
— клетки Жордана порядков `
j
; ρ
1
, ··· , ρ
m
— собственные числа мат-
рицы Φ, соответствующие различным клеткам Жордана (не обяза-
тельно различные между собой), S — некоторая неособая матрица.
Из (24) имеем
Φ
k
= (S
−1
JS)
k
= S
−1
J
k
S, k ∈ N. (26)
Используя правило умножения клеточно-диагональных матриц,
найдем
J
k
= diag [J
1
(ρ
1
)
k
, ··· , J
m
(ρ
m
)
k
] (k ∈ N). (27)

162
Для матрицы (25) нетрудно подсчитать, что
J
j
(ρ
j
)
k
=
ρ
k
j
k·ρ
k−1
j
1!
k(k−1)ρ
k−2
j
2!
···
k(k−1)···(k−`
j
+2)ρ
k−`
j
+1
j
(`
j
−1)!
0 ρ
k
j
kρ
k−1
j
1!
···
k(k−1)···(k−`
j
+3)ρ
k−`
j
+2
j
(`
j
−2)!
.
.
.
.
.
.
.
.
.
···
.
.
.
.
.
.
0 0 0 ··· ρ
k
j
.
(28)
Из (26)-(28) получаем
kΦ
k
k ≤ kS
−1
k · kJ
k
k · kSk ≤ C
0
max
j
kJ
j
(ρ
j
)
k
k ≤ C
0
C
1
max
j
|ρ
j
|
k
P (k),
(29)
где P (k) — некоторый многочлен от k степени r = max
j
(`
j
− 1) с
положительными коэффициентами, а C
0
и C
1
— некоторые положи-
тельные константы.
Поскольку при любом µ > 1
lim
k→+∞
µ
−k
P (k) = 0,
то из (29) имеем следующую оценку
kΦ
k
k ≤ C
µ
(µγ)
k
(µ > 1), (30)
где γ = max
j
|ρ
j
|, C
µ
— некоторая константа, зависящая от µ.
Если собственным числам матрицы Φ, имеющим максимальный
модуль соответствуют простые жордановые клетки (т.е. последние
сводятся к одному элементу), то в (29) P(k) = const и, поэтому,
вместо (30) будем иметь
kΦ
k
k ≤ Cγ
k
.
2. Докажем теперь утверждение теоремы 4. Пусть x ∈ R
n
. Тогда
образами этой точки при последовательном применении отображе-
ния F = Φ (здесь мы отождествляем отображение F с матрицей Φ )
будут точки
x
k
= Φ
k
x, k = 1, 2, ··· . (31)
163
Пусть собственные числа ρ
j
матрицы Φ расположены внутри еди-
ничного круга |p| < 1. Тогда, поскольку в (30) µ > 1 — произвольное
число, то всегда можно выбрать µ таким, чтобы µγ < 1.
Используя (30), оценим норму вектора x
k
из (31):
kx
k
k ≤ kΦ
k
k · kxk ≤ C
µ
(µγ)
k
kxk (k ∈ N). (32)
Так как µγ < 1, то, как легко видеть, из неравенства (32) следует
асимптотическая устойчивость неподвижной точки x = 0 отображе-
ния F , т.е. достаточность утверждения теоремы 4.
Докажем необходимость. Пусть неподвижная точка x = 0 отоб-
ражения F асимптотически устойчива. Допустим, что существует
собственное значение ρ
j
0
такое, что |ρ
j
0
| ≥ 1. Тогда, положив в (31)
x = ξ, где ξ — собственный вектор матрицы Φ, соответствующий её
собственному числу ρ
j
0
, будем иметь из (31)
ξ
k
= Φ
k
ξ = ρ
k
j
0
ξ (k ∈ N), (33)
поскольку Φξ = ρ
j
0
ξ. Из (33) получаем
kξ
k
k = |ρ
j
0
|
k
kξk ≥ kξk (∀k ∈ N).
Последнее неравенство означает отсутствие асимптотической устой-
чивости неподвижной точки x = 0 отображения F . Полученное про-
тиворечие доказывает необходимость утверждения теоремы 4.
Теорема 4 доказана.
О п р е д е л е н и е 6. Собственные значения ρ
j
(j = 1, . . . , n) оператора монодромии H (или соответствующей ей
матрицы монодромии Ψ(T )) называются м у л ь т и п л и к а т о р а-
м и с и с т е м ы (1).
Из теоремы 2
0
и 4 вытекает
Теорема 5. Линейная периодическая система (1) асимптотиче-
ски устойчива тогда и только тогда, когда все её мультипликато-
ры расположены внутри единичного круга |p| < 1 (p ∈ C).
Докажем теперь следующую теорему, которая устанавливает до-
статочные условия устойчивости по Ляпунову отображения
F : R
2
→ R
2
.
164
О п р е д е л е н и е 7. Линейное отображение F плоско-
сти R
2
на себя называется г и п е р б о л и ч е с к и м, если его соб-
ственные числа λ
1
и λ
2
вещественны, различны и λ
1
λ
2
= 1, и
э л л и п т и ч е с к и м, если его собственные числа λ
1
и λ
2
комплекс-
но сопряжены и λ
1
λ
2
= 1.
Лемма. Пусть F — линейное отображение плоскости на себя.
Тогда начало координат плоскости (x
1
, x
2
) устойчиво для эллипти-
ческого и неустойчиво для гиперболического отображений.
Короче: эллиптическое отображение — устойчивое отображе-
ние, а гиперболическое отображение — неустойчивое.
Д о к а з а т е л ь с т в о . Пусть F — эллиптическое отображение
и λ, λ — его собственные числа, причем λλ = 1. Собственному числу
λ отвечает собственный вектор z ∈ C
2
= CR
2
комплексифицирован-
ного оператора
C
F : C
2
→ C
2
(см. § 2, гл.I). Представим z в виде:
z = x + iy, x ∈ R
2
, y ∈ R
2
. Тогда сопряженный вектор z = x − iy
также является собственным вектором с собственным значением λ.
Так как векторы z и z линейно независимы в C
2
, то легко видеть, что
и векторы x, y будут линейно независимыми в R
2
, т.е. x и y образуют
базис в R
2
.
Найдем матрицу оператора
C
F в (вещественном) базисе x, y. По-
скольку λλ = 1, то собственные числа λ и λ лежат на единичной
окружности |p| = 1 плоскости комплексного переменного p. Поэтому
λ, λ = cos α ± i sin α, где α = arg λ. По определению
C
F имеем:
C
F x + i
C
F y =
C
F (x + iy) =
(cos α + i sin α)(x + iy) = (x cos α − y sin α) + i(x sin α + y cos α).
Отсюда
C
F x = x cos α − y sin α,
C
F y = x sin α + y cos α.
Поэтому матрицей оператора F : R
2
→ R
2
в базисе {x, y} будет
µ
cos α sin α
−sin α cos α
¶
.
Таким образом, отображение F аффинно эквивалентно повороту на
угол α и, следовательно, будет устойчивым, так как траектория про-
извольной точки ξ ∈ R
2
− {F
k
ξ, k ∈ N} — лежит на эллипсе.
165
Пусть теперь F — гиперболическое отображение. Тогда одно из
собственных чисел (пусть это λ
1
) меньше, а другое (λ
2
) больше 1
по модулю. Поэтому отображение F состоит из сжатия в |λ
1
|
−1
раз
в направлении собственного вектора ξ
1
, соответствующего собствен-
ному числу λ
1
, и растяжения в |λ
2
| раз в направлении собственного
вектора ξ
2
, соответствующего собственному числу λ
2
. Оператор F в
базисе {ξ
1
, ξ
2
} имеет матрицу
µ
λ
1
0
0 λ
2
¶
.
Следовательно, отображение F аффинно эквивалентно гиперболи-
ческому повороту: (x
1
, x
2
) → (λ
1
x
1
; λ
2
x
2
) и, поэтому, неустойчиво,
так как траектории — {F
k
ξ, k ∈ N, ξ ∈ R
2
} — лежат на гиперболах
(траектория, начинающаяся в сколь угодно малой окрестности нача-
ла координат, после достаточно большого числа итераций F
k
выйдет
из любой фиксированной окрестности начала). Лемма доказана.
Теорема 6. Пусть Φ — матрица линейного отображения F плос-
кости на себя, причем det Φ = 1 (такое отображение сохраняет
площади).
Тогда начало координат устойчиво для отображения F (или, ко-
роче, отображение F устойчиво), если
|Tr Φ| < 2,
и неустойчиво, если
|Tr Φ| > 2.
Д о к а з а т е л ь с т в о . Характеристический многочлен матрицы
Φ имеет вид:
p
2
− σ · p + ∆,
где σ и ∆ — вещественные числа. Корни λ
1
и λ
2
этого многочлена
(собственные числа матрицы Φ) вещественны при |σ| > 2 и комплек-
сно-сопряжены при |σ| < 2. Так как
σ = λ
1
+ λ
2
= Tr Φ, ∆ = λ
1
λ
2
= det Ψ = 1,
то в первом случае (|T r Φ| > 2) одно из собственных чисел по мо-
дулю больше, а другое меньше 1, а во втором случае (|T r Φ| < 2)
собственные числа λ
1
и λ
2
=
¯
λ
1
лежат на единичной окружности
166
|p| = 1. В первом случае, отображение F гиперболическое и, следо-
вательно, в силу доказанной выше леммы, неустойчиво, а во втором
случае, отображение F эллиптическое и, поэтому, в силу той же лем-
мы, устойчиво. Теорема 5 доказана.
Замечание. Как мы видели выше, при последовательном приме-
нении (итерациях) отображения монодромии H к произвольной точ-
ке x
0
∈ R
n
получаем последовательность {x
k
} точек x
k
∈ R
n
(k =
0, 1, 2, ···), причем
x
k+1
= Hx
k
(k = 0, 1, 2, ···). (34)
Последнее соотношение представляет собой дискретную систему.
Таким образом, здесь при рассмотрении определенных свойств ре-
шений (как, например, устойчивость) мы заменяем систему диффе-
ренциальных уравнений (1) на соответствующую ей линейную дис-
кретную систему (34), где H — отображение за время периода T ,
порождаемое траекториями системы (1).
Некоторые аспекты теории линейных дискретных систем будут
рассмотрены в гл.VI.
§ 3. Низкочастотная стабилизация верхнего положения
равновесия маятника
Прежде чем перейти к проблеме Брокетта и к алгоритмам постро-
ения соответствующих стабилизирующих функций s(t) для системы
(3) § 1, мы рассмотрим сначала классическую задачу о стабилиза-
ции верхнего положения равновесия маятника с вибрирующей точ-
кой подвеса.
Рассмотрим колебания маятника, который может свободно вра-
щаться в определенной вертикальной плоскости вокруг своей точки
подвеса. Предположим, что точка подвеса совершает в вертикальном
направлении колебания с некоторой амплитудой и частотой.
Спрашивается, может ли верхнее, обычно неустойчивое, поло-
жение равновесия маятника стать устойчивым ?
Как показано в работах [31,77] неустойчивое верхнее положение
равновесия маятника может сделаться устойчивым при достаточно
быстрых колебаниях точки подвеса (когда точка подвеса совершает

167
в вертикальном направлении гармонические колебания y = a sin ωt
или y = a cos ωt с малой амплитудой a и высокой частотой ω). Этот
хорошо известный эффект высокочастотной стабилизации верхнего
положения равновесия мы рассмотрим позже в следующей главе V.
Здесь же мы рассмотрим возможность стабилизации верхнего по-
ложения равновесия маятника при низкочастотных колебаниях точ-
ки подвеса.
Для рассмотрения этого интересного явления (стабилизации верх-
него положения равновесия) составим уравнение колебаний маятни-
ка с вибрирующей точкой подвеса.
Как хорошо известно, уравнение колебаний маятника с покоящей-
ся точкой подвеса имеет вид
¨
θ + α
˙
θ + ν
2
0
sin θ = 0 (ν
2
0
= g/`) (1)
(в предположении, что трение пропорционально скорости), где θ —
угол отклонения, отсчитываемый от нижнего положения равновесия,
α — коэффициент трения, ν
0
=
p
g/` — собственная частота малых
колебаний (` — длина маятника, g — ускорение свободного падения).
Пусть точка подвеса совершает колебания в вертикальном направ-
лении по закону y = y(t), где y(t) — некоторая периодическая функ-
ция. Чтобы составить уравнение колебаний маятника с вибрирующей
точкой подвеса воспользуемся принципом относительности, соглас-
но которому движение маятника с вертикально вибрирующей точкой
подвеса эквивалентно движению маятника с покоящейся точкой под-
веса, находящемуся в поле "силы тяжести"с ускорением g + y
00
(t).
Поэтому, заменяя в (1) g на g + y
00
(t), получим искомое уравнение
¨
θ + α
˙
θ +
g + y
00
(t)
`
sin θ = 0. (2)
Уравнение (2) допускает стационарное решение θ(t) ≡ π , соответ-
ствующее верхнему положению равновесия маятника (стационарное
решение θ(t) ≡ 0 соответствует нижнему положению равновесия ма-
ятника).
Для исследования устойчивости следует рассмотреть малые от-
клонения (вариации) δθ = θ − π от этого положения равновесия
(θ = π). Уравнение первого приближения (уравнение в вариациях)
168
выглядит так (переобозначив δθ → θ):
¨
θ + α
˙
θ + (s(t) − ν
2
0
)θ = 0, (3)
где s(t) = y
00
(t)/` (s(t) – с точностью до константы ускорение точ-
ки подвеса). Наиболее часто рассматриваются (мы их рассмотрим в
гл.V) функции s(t) вида s
0
+βω cos ωt (или s
0
+βω
2
cos ωt) ([259,260])
и периодические функции вида ([16,17])
s(t) =
½
β при t ∈ [0, T/2),
−β при t ∈ [T/2, T ),
s(t + T ) = s(t), t ∈ [0, +∞),
где β > 0 — некоторое число, а T — период функции s(t).
Исследуем уравнение (3). Задача состоит в том, чтобы найти функ-
цию s(t) такую, чтобы положение равновесия (θ = 0,
˙
θ = 0) уравне-
ния (3) было асимптотически устойчивым (напомним, что в уравне-
нии (3) θ — угол отклонения, отсчитываемый от верхнего положения
равновесия).
Перейдем от уравнения (3) к эквивалентной ему системе
(
x
1
=
θ
)
½
˙x
1
= x
2
,
˙x
2
= −αx
2
− (s(t) − ν
2
0
)x
1
,
(4)
где стабилизирующая функция s(t) подлежит определению.
Будем искать стабилизирующую функцию s(t) в классе кусочно-
постоянных периодических с периодом T (где T — достаточно боль-
шое число) функций вида
s(t) =
−β при t ∈ [0, T/4),
β при t ∈ [T/4, 3T/4),
−β при t ∈ [3T/4, T ),
s(t + T ) = s(t) ∀T ∈ [0, +∞)
(5)
(где β > 0), имеющих нулевое среднее на периоде (см (4) § 1).
Для функций s(t) вида (5) покажем возможность стабилизации
верхнего положения равновесия маятника при низкочастотных ко-
лебаниях точки подвеса.
Имеет место следующая
Теорема. Пусть в системе (4), (5)
α
2
< 4(β − ν
2
0
).
169
Тогда для любого числа M > 0 существует число T > M такое, что
система (4) с функцией s(t) вида (5) асимптотически устойчива.
Д о к а з а т е л ь с т в о . Прежде всего, заметим, что, не умаляя
общности, можно считать
ν
2
≡ β − ων
2
0
− α
2
/4 = 1.
Этого можно добиться всегда, сделав в уравнении (3) (или в системе
(4)) замену времени
τ = νt.
Рассмотрим нужные нам свойства системы (4), когда s(t) = −β и
s(t) = β.
При s(t) = −β система (4), т.е. система
½
˙x
1
= x
2
,
˙x
2
= −αx
2
+ (β + ν
2
0
)x
1
,
(6)
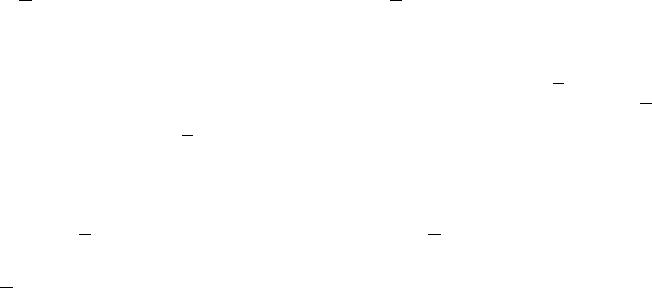
имеет седловую особую точку (x
1
= 0, x
2
= 0) с неустойчивым мно-
гообразием M
1
= {x
2
= `
1
x
1
} и устойчивым многообразием
L
1
= {x
2
= `
2
x
1
} (рис.13).
Рис.13. Неустойчивое (верхнее) положение
равновесия уравнения маятника —седло.
170
Здесь
`
1
= −
α
2
+
r
α
2
4
+ (β + ν
2
0
) (`
1
= λ
1
> 0),
`
2
= −
α
2
−
r
α
2
4
+ (β + ν
2
0
) (`
2
= λ
2
< 0),
( `
1
и `
2
совпадают с корнями λ
1
и λ
2
характеристического уравнения
p
2
+ αp − (β + ν
2
0
) = 0).
Фазовый поток {f
t
} системы (6) состоит из сжатий в e
−`
2
t
раз в
направлении прямой x
2
= `
2
x
1
и одновременного растяжения в e
`
1
t
раз в направлении прямой x
2
= `
1
x
1
.
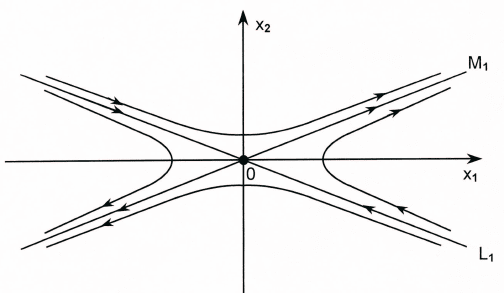
В силу условия α
2
< 4(β −ω
2
0
) теоремы характеристический мно-
гочлен p
2
+ αp + (β − ν
2
0
) = 0 системы (4) при s(t) = β, т.е. системы
½
˙x
1
= x
2
,
˙x
2
= −αx
2
− (β −ν
2
0
)x
1
,
(7)
имеет комплексно-сопряженные корни −α/2 ± i (ν = 1) и, следова-
тельно, положение равновесия (0, 0) системы (7) — устойчивый фо-
кус (рис.14).
Рис.14. Положение равновесия системы (7) — устойчивый фокус.
Фазовый поток {g
t
} системы (7) аффинно эквивалентен семейству
сжатий в e
αt/2
раз с одновременным вращением на угол t.