Леонов Г.А., Шумафов М.М. Проблемы стабилизации линейных управляемых систем
Подождите немного. Документ загружается.

141
Теорема 2 (о стабилизируемости тройки (A, b, c)).Пусть мат-
рицы A, b и c в системе (1) удовлетворяют следующим условиям:
1) пара (A, b) стабилизируема, а пара (A, c) полностью наблюда-
ема;
2) существуют вещественные соответственно (`×m)- и (m×n)-
матрицы s и g, удовлетворяющие соотношениям (23), (24), где H =
H
∗
— вещественная положительно определенная матрица.
Тогда система (1) стабилизируема.
Д о к а з а т е л ь с т в о . Из соотношений (23) и (24), оче-
видно, следует, что выполнено равенство (25). Отсюда, поскольку
css
∗
c
∗
≥ 0, получаем неравенство
(A + bs
∗
c
∗
)
∗
H + H(A + bs
∗
c
∗
) ≤ −cc
∗
. (26)
Так как пара (A, c) полностью наблюдаема, то по теореме двой-
ственности Калмана пара (A
∗
, c) и, следовательно, в силу следствия 1
теоремы о критериях управляемости (см. § 1, гл.II) пара
(A
∗
+ csb
∗
, c) будет полностью управляемой. Поэтому по той же тео-
реме двойственности Калмана полностью наблюдаемой будет пара
(A + bs
∗
c
∗
, c). Отсюда и из неравенства (26) в силу леммы 2 следует,
что A + bs
∗
c
∗
гурвицева, так как H > 0. Последнее означает, что
тройка (A, b, c) стабилизируема. Теорема 2 доказана.
Замечание 1. Условия теоремы 2 являются лишь достаточными,
но не необходимыми. В работе [237] показано, что условия теоре-
мы 1 являются и достаточными для стабилизируемости системы (1).
Как это видно из сравнений условий теорем 1 и 2, условия теоре-
мы 2 несколько более стеснительны, чем условия теоремы 1: вместо
стабилизируемости пары (A
∗
, c) и неотрицательной определенности
матрицы H (в теореме 1) требуется соответственно полная наблюда-
емость пары (A, c) и положительная определенность матрицы H (в
теореме 2).
Замечание 2. Левая часть равенства (25) определяет, очевидно,
линейный оператор K в (линейном) пространстве эрмитовых матриц
{H} (H
∗
= H):
K(H) = (A + bs
∗
c
∗
)
∗
H + H(A + bs
∗
c
∗
).
В силу леммы 1 (леммы А.М.Ляпунова) уравнение K(H) = G од-
нозначно разрешимо при любой матрице G = G
∗
, поскольку A+bs
∗
c
∗
142
— гурвицева матрица. Поэтому оператор K обратим. Обозначим че-
рез L — линейный оператор, обратный к K : L = K
−1
. Тогда реше-
ние H уравнения (25) можно записать так: H = −L(cc
∗
) −L(css
∗
c
∗
).
Подставляя это значение H в уравнение (23) (предварительно сделав
операцию транспонирования в обеих его частях) получим квадрат-
ное уравнение относительно (` × m)-матрицы (cs):
L(css
∗
c
∗
)b − cs = −g
∗
− L(cc
∗
)b.
(В таком виде записывались так называемые разрешающие урав-
нения Лурье в векторной форме [3,49,102,103,105]). Таким образом,
уравнения (25), (23), а значит, и уравнения (24), (23) сводятся к урав-
нениям Лурье-Риккати. Очевидно, верно и обратное. В [105] и др.
были получены условия разрешимости уравнений Лурье в случаях
m = 1, ` = 2, 3, 4, 5. С использованием этих уравнений были найде-
ны решения многих практически важных задач. Для общего случая
условием разрешимости уравнений Лурье является так называемое
"частотное"условие Якубовича-Калмана [54], которое в случае ли-
нейных систем вида (1) совпадает с критерием Найквиста.
Замечание 3. Проблема стационарной стабилизации линейных
систем вида (1) является одной из самых важных вопросов в теории
управления при синтезе линейной обратной связи, поскольку одним
из достоинств решения этой проблемы является его аналитически
замкнутая форма. Поэтому этой проблеме посвящено большое ко-
личество работ, обзор которых можно найти, например, в статьях
[196,282] .
§ 8. Стабилизируемость неполностью управляемых систем
В § 4 настоящей главы мы доказали теорему о стабилизации пары
(A, b) в предположении её полной управляемости. Приведем теперь
теорему, дающую достаточное условие стабилизируемости системы
˙x = Ax + bu, x ∈ R
n
, u ∈ R
m
(1)
(где A и b — постоянные (n ×n)- и (n ×m)-матрицы соответственно)
в случае, когда пара (A, b) не является полностью управляемой.
Пусть среди n корней λ
1
, ··· , λ
n
(каждый корень выписывается
столько раз, какова его кратность) характеристического уравнения
143
det (pI − A) = 0 имеются ровно k таких, у которых вещественные
части неотрицательны (а у остальных n−k корней— отрицательны).
Тогда систему (1) невырожденным линейным преобразованием пе-
ременных x = Qy (y ∈ R
n
, Q — неособая матрица) можно привести
к виду (за матрицу Q достаточно взять матрицу, приводящую A к
вещественной жордановой нормальной форме):
(
˙y
1
=
e
A
1
y
1
+
e
b
1
u, y
1
∈ R
k
,
˙y
2
=
e
A
2
y
2
+
e
b
2
u, y
2
∈ R
n−k
, u ∈ R
m
,
(2
0
)
(2
00
)
где
e
A ≡
µ
e
A
1
0
0
e
A
2
¶
= Q
−1
AQ,
e
b ≡
Ã
e
b
1
e
b
2
!
, (3)
причем
e
b
1
∈ R
k
,
e
b
2
∈ R
n−k
,
e
A
1
— (k × k)-матрица, все собственные
числа которой имеют неотрицательные вещественные части, а
e
A
2
—
гурвицева матрица порядка (n − k) × (n − k);
e
b
1
и
e
b
2
— матрицы
порядков k × m и (n − k) × m соответственно.
Теорема (о стабилизируемости неполностью управляемой
системы). Пусть в системе (2
0
), (2
00
)
rank (
e
b
1
,
e
A
1
e
b
1
, ··· ,
e
A
k−1
1
e
b
1
) = k < n.
Тогда система (1) стабилизируема.
Д о к а з а т е л ь с т в о . По теореме о стабилизации из § 5,
примененной к подсистеме (2
0
) системы (2
0
),(2
00
) существует (веще-
ственная) (k×m)-матрица es
1
такая, что матрица
e
A
1
+
e
b
1
es
∗
1
гурвицева,
а u = es
∗
1
y
1
есть стабилизирующее управление для подсистемы (2
0
).
При таком управлении матрица (полной) системы (2
0
), (2
00
) имеет
вид
B =
e
A
1
+
e
b
1
es
∗
1
| 0
e
b
2
es
∗
1
| A
2
¾
k
¾
n-k
.
| {z }
k
|{z}
n-k
(4)
144
Характеристический многочлен этой матрицы по теореме Лапласа
о разложении определителя по k строкам можно записать так:
det (pI −B) = det [pI −(
e
A
1
+
e
b
1
es
∗
1
)] · det (pI −
e
A
2
).
Так как матрицы
e
A
1
+
e
b
1
es
∗
1
и
e
A
2
гурвицевы, то в силу последнего
равенства и матрица B тоже будет гурвицевой.
Таким образом, управление
u = es
∗
0
y,
где
es
∗
0
= ( es
∗
1
|{z}
k
, 0
|{z}
n−k
) (5)
(es
∗
0
— матрица, полученная из матрицы es
∗
1
дополнением её до (m×n)-
матрицы нулевой матрицей порядка m × (n − k) является стабили-
зирующей для всей системы (2
0
),(2
00
)).
Чтобы построить стабилизирующее управление для исходной си-
стемы (1), перепишем матрицу (4) так:
B =
e
A +
e
bes
∗
0
. (6)
С учетом равенств (3), представим матрицу (6) в виде
B = Q
−1
AQ + Q
−1
bes
∗
0
= Q
−1
(A + bes
∗
0
Q
−1
)Q. (7)
Поскольку матрица B гурвицева и, в силу (7), матрицы B и
C = A + bs
∗
,
где
s = (Q
∗
)
−1
es
0
, (8)
подобны, то матрица C тоже гурвицева (es
∗
0
— матрица (5)). Послед-
нее означает, что пара (A, b) стабилизируема, причем стабилизирую-
щее управление имеет вид
u = s
∗
x,
где s — матрица (8).
145
ГЛАВА IV
НЕСТАЦИОНАРНАЯ НИЗКОЧАСТОТНАЯ
СТАБИЛИЗАЦИЯ ЛИНЕЙНЫХ СИСТЕМ
В следующих двух главах мы будем рассматривать задачу неста-
ционарной линейной стабилизации (соответственно низкочастотной
и высокочастотной).
§ 1. Постановка задачи. Проблема Брокетта
Рассмотрим линейную систему
˙x = Ax + bu, y = c
∗
x, x ∈ R
n
, u ∈ R
m
, y ∈ R
`
, (1)
где A, b и c вещественные постоянные (n × n)−, (n × m)− и (n ×
`)-матрицы соответственно. Р.Брокетт в книге [198] сформулировал
следующую задачу: найти (`×m)-матрицу s(t) такую, чтобы система
(1), замкнутая обратной связью
u = s(t)
∗
y, (2)
была асимптотически устойчивой (в целом).
Другими словами, проблема Брокетта формулируется так: дана
тройка матриц A, b и c (порядков n × n, n × m и n × ` соответ-
ственно). Спрашивается при каких условиях существует матрица
s(t) (порядка (` × m)) такая, что система
˙x = (A + bs(t)
∗
c
∗
)x (x ∈ R
n
) (3)
является асимптотически устойчивой ?
В предыдущей главе нами была рассмотрена задача стабилизации
системы (1) с помощью постоянной матрицы s(t) ≡ s = const . В
проблеме Брокетта требуется найти переменную стабилизирующую
матрицу s = s(t), обладающую указанным выше свойством. Поэтому
проблему Брокетта можно переформулировать следующим образом.
Насколько введение зависимых от времени t матриц s(t) расши-
ряет возможности стационарной стабилизации ?
В задачах стабилизации механических систем часто оказывает-
ся необходимым рассматривать более узкий класс стабилизирующих

146
матриц s(t), а именно, периодические матрицы s(t), имеющие нуле-
вое среднее на периоде [0, T ]:
T
Z
0
s(t) dt = 0. (4)
В настоящей главе рассматриваются алгоритмы построения пе-
риодических кусочно-постоянных функций s(t), решающих в ряде
случаев проблему Брокетта. При изложении соответствующих ре-
зультатов будем следовать работам [96,98,245–247].
§ 2. Линейные системы дифференциальных уравнений
с периодической матрицей
Напомним основные факты из теории линейных уравнений с пе-
риодическими коэффициентами, которые нам понадобятся в даль-
нейшем.
1. Фазовые потоки. Понятие фазового потока и фазового про-
странства являются основными в теории дифференциальных урав-
нений.
Рассмотрим линейную систему
˙x = A(t)x, t ∈ R, x ∈ R
n
(1)
с кусочно-непрерывной на R периодической с периодом T > 0 мат-
рицей A(t):
A(t + T ) = A(t) ∀t ∈ R.
Пространство R
n
называется фазовым пространством, а прямое
произведение R
n+1
= R × R
n
— расширенным фазовым простран-
ством системы (1).
Пример. Уравнение маятника (при малых колебаниях и отсут-
ствии трения) имеет вид
¨x + ω
2
x = 0.
Частота ω определяется длиной маятника ` : ω =
q
g
`
(g — уско-
рение свободного падения). Колебания маятника переменной длины
описываются аналогичным уравнением:
¨x + ω
2
(t)x = 0,
147
которое можно записать в виде системы (1):
½
˙x = x
2
,
˙x
2
= −ω
2
(t)x
1
,
, A(t) =
µ
0 1
−ω
2
(t) 0
¶
.
(Примером маятника переменной длины являются качели.)
В случае, когда в (1) матрица A(t) непрерывна, из общего курса
дифференциальных уравнений известно, что решение x = ψ(t; x
0
, t
0
)
уравнения (1) существует, определяется начальным условием
ψ(t
0
; x
0
, t
0
) = x
0
однозначно и зависит от t
0
, x
0
и t непрерывно, при-
чем все решения уравнения (1) неограниченно продолжаемы вправо
и влево, т.е. определены на всей оси (−∞, +∞). В случае, когда A(t)
кусочно-непрерывна, а матрица-функция A(t) имеет точки разрыва
первого рода (скачки), всю ось (−∞, +∞) можно разбить на счет-
ное число интервалов I
k
= (t
k−1
, t
k
) (k = 1, 2, ···), на каждом из
которых матрица A(t) непрерывна и, следовательно, решения урав-
нения (1) определены на интервалах I
k
(k = 1, 2, . . .). Далее, в точ-
ках разрыва t
k
, разделяющих интервалы непрерывности I
k
, решения
"склеиваются". А именно, пусть решение x = ψ
k
(t) определено на
I
k
= (t
k−1
, t
k
). Тогда чтобы продолжить это решение на следующий
интервал I
k+1
= (t
k
, t
k+1
), достаточно продолжить сначала реше-
ние ψ
k
(t) до точки t = t
k
, затем взять на интервале I
k+1
то реше-
ние x = ψ
k+1
(t), которое удовлетворяет условию: ψ
k+1
(t
k
) = ψ
k
(t
k
).
Продолжая этот процесс вправо и, аналогично, влево, получим ре-
шение x = ψ(t) уравнения (1), определенное и непрерывное на всей
оси (−∞, +∞). Причем это решение обладает теми же свойствами
(единственности, непрерывной зависимости от начальных условий),
что и в случае непрерывной матрицы A(t) (см.[155,214]).
График решения x = ψ(t) системы (1) называется интегральной
кривой, а образ отображения ψ : R → R
n
— фазовой кривой или
траекторией системы (1).
Таким образом, траектория системы (1) лежит в фазовом про-
странстве R
n
, а интегральная кривая — в расширенном фазовом
пространстве R
n+1
.
Пусть x = ψ(t; x
0
, t
0
) (t ∈ R) — решение системы (1) с начальным
условием
ψ(t
0
; x
0
, t
0
) = x
0
(t
0
∈ R; x
0
∈ R
n
). (2)
148
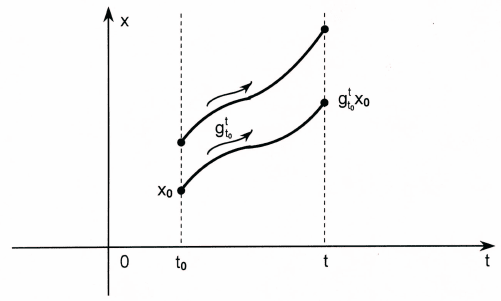
О п р е д е л е н и е 1. Преобразованием за время от t
0
до t, осу-
ществляемым траекториями системы (1), называется отображе-
ние фазового пространства R
n
в себя, сопоставляющее начальному
условию x
0
в момент t
0
значение решения x = ψ(t; x
0
, t
0
) системы
(1) в момент t (рис.10).
Это преобразование обозначается так: g
t
t
0
.
Таким образом,
g
t
t
0
: R
n
→ R
n
: g
t
t
0
x
0
= ψ(t; x
0
, t
0
) ∀x
0
∈ R
n
(t
0
, t ∈ R) (3)
Рис.11. Преобразование g
t
t
0
за время от t
0
до t.
Из формулы (3) следует, что, если отождествить каждую гипер-
плоскость t = t
0
в расширенном фазовом пространстве с фазовым
пространством R
n
, то преобразование g
t
2
t
1
(t
1
, t
2
∈ R) можно рассмат-
ривать как отображение (осуществляемое интегральными кривыми
системы (1)) гиперплоскости t = t
1
в гиперплоскость t = t
2
.
О п р е д е л е н и е 2. Семейство преобразований {g
t
t
0
,
t
0
∈ R, t ∈ R} называется ф а з о в ы м п о т о к о м системы (1) с
фазовым пространством R
n
.
Траектории системы (1) называются траекториями соответству-
ющего ей фазового потока.
Замечание. В частном случае, когда в системе (1) матрица A(t)
постоянная: A(t) ≡ A (A = const ), преобразования g
t
t
0
зависят лишь
149
от разности t − t
0
и совпадают с преобразованием g
t−t
0
0
за время от
0 до t − t
0
:
g
t
t
0
= g
t−t
0
0
(∀t
0
, t ∈ R
n
). (4)
Последнее равенство следует из теоремы единственности решений
и того факта, что если x = ψ(t) — решение системы ˙x = Ax (A =
const ) с начальным условием ψ(t
0
) = x
0
, то x = ψ
0
(t) ≡ ψ(t + t
0
)
— решение этой системы с начальным условием ψ
0
(0) = x
0
(сдвиг
решения вдоль оси t есть снова решение — свойство, которым об-
ладают все решения систем дифференциальных уравнений, правые
части которых не зависят от t (автономные системы)). Поэтому для
системы ˙x = Ax (x ∈ R
n
) с постоянной матрицей A, в силу (4), мож-
но говорить о преобразовании за время τ = t−t
0
или (переобозначив
τ → t ) за время t. Преобразование за время t, соответствующее си-
стеме (1) с постоянной матрицей A(t) ≡ A, будем обозначать через
g
t
(без нижнего индекса 0), т.е.
g
t
:= g
t
0
(∀t ∈ R), (5)
и соответственно ее фазовый поток — {g
t
, t ∈ R} или просто {g
t
}.
2. Примеры фазовых потоков простейших дифференци-
альных уравнений.
1. ˙x = 0. Фазовый поток есть g
t
x = x (x ∈ R).
2. ˙x = 1. Фазовый поток — g
t
x = x + t (x ∈ R).
3. ˙x = kx. Имеем x(t) = e
kt
x
0
. Поэтому фазовый поток есть
{e
kt
}; g
t
x = e
kt
x(∀ x ∈ R).
4. ˙x = y, ˙y = 0. Решение этой системы: x(t) = x
0
+ ty
0
, y(t) = y
0
.
Поэтому фазовый поток — g
t
: (x, y) → (x + ty, y) ∀(x, y) ∈ R
2
.
5. ˙x = y, ˙y = 1. Решение: x(t) = x
0
+ y
0
t + t
2
/2, y(t) = y
0
+ t.
Фазовый поток – g
t
: (x, y) → (x + ty + t
2
/2, y + t) ∀(x, y) ∈ R
2
.
6. ˙x = y, ˙y = −x (уравнения малых колебаний маятника). Реше-
ние:
½
x(t) = x
0
cos t + y
0
sin t,
y(t) = −x
0
sin t + y
0
cos t.
Фазовым потоком являются повороты плоскости (x, y) на угол t
(эллиптические повороты):
g
t
=
µ
cos t sin t
−sin t cos t
¶
.
150
(Здесь отображение g
t
отождествляется с матрицей, описывающей
его в базисе e
1
= (1, 0)
∗
, e
2
= (0, 1)
∗
). Для любой точки (x, y) ∈ R
2
g
t
: (x, y) → (x cos t + y sin t, −x sin t + y cos t).
Траекториями фазового потока являются окружности (аффинные
образы эллипсов) — под действием фазового потока точки плоскости
движутся по окружностям.
7. ˙x = y, ˙y = x (уравнение малых колебаний перевернутого маят-
ника). Решение:
x(t) = x
0
e
t
+ e
−t
2
+ y
0
e
t
− e
−t
2
= x
0
ch t + y
0
sh t,
y(t) = x
0
e
t
− e
−t
2
+ y
0
e
t
+ e
−t
2
= x
0
sh t + y
0
ch t.
Здесь фазовым потоком являются гиперболические повороты:
g
t
=
µ
ch t sh t
sh t ch t
¶
(отображение g
t
отождествляется с описывающей его матрицей в ба-
зисе e
1
= (1, 0)
∗
, e
2
= (0, 1)
∗
). Для любой точки (x, y) ∈ R
2
g
t
: (x, y) → (xch t + ysh t, xsh t + ych t).
Траекториями фазового потока являются гиперболы — под действи-
ем фазового потока точки плоскости движутся по гиперболам.
Преобразование g
t
(гиперболический поворот) состоит из сжатия
в e
t
раз в направлении собственного вектора ξ
1
, соответствующего
собственному значению λ
1
= −1 матрицы g
t
, и растяжения в e
t
раз
в направлении собственного вектора ξ
2
, соответствующего собствен-
ному значению λ
2
= 1.
Заметим, что эллиптический и гиперболический повороты сохра-
няют площади (так как det g
t
= 1).
Замечание . В вышеприведенных примерах гладкое векторное
поле, заданное дифференциальным уравнением (или системой), опре-
деляло фазовый поток. Возникает вопрос, всякое ли гладкое вектор-
ное поле определяет фазовый поток ? Ответ — нет, не всякое.
Контрпримером может служить уравнение: ˙x = x
2
, x ∈ R. Реше-
ние этого уравнения: x(t) = x
0
/(1 − x
0
t). Поэтому g
t
x = x/(1 − xt).
Однако последняя формула не задает фазовый поток – отображение