Kurfess T.R. Robotics and Automation Handbook
Подождите немного. Документ загружается.

21
-10 Robotics and Automation Handbook
collision detection, kinematic constraints) can be directly answered using kinematic simulation. Inclusion
of the dynamics becomes important when the engineer is interested in more detailed information such as
reaction forces, sizing motors/actuators, sensor selection, control design, estimating power consumption
and determining how contacting parts behave. We consider two approaches to simulation of the robot
dynamics. First is the canned approach that handles the computation of the dynamic equations of motion
based on a CAD model of the system. The second approach is based on using a time domain simulation
package such as Matlab’s Simulink or MatrixX’s SystemBuild
®
.Thefirst approach is generally much easier
and provides sufficient information to answer fundamental questions. In addition, in many cases, it is
possible to integrate the dynamic simulation package with a control package such as Simulink or System-
Build. The second approach requires a deeper understanding of the system’s dynamics but enables greater
flexibility in terms of modeling the system (including control algorithms, sensory feedback, arbitrary
inputs).
21.3.4.1 Multibody Dynamic Packages
Two examples of multibody dynamic simulation packages are LMS International’s Dynamic Motion Sim-
ulation (DADS) and MSC Software’s Adams. With both packages, you begin by either building a pa-
rameterized model of the robot or importing the model from a CAD system, much like the simulation
packages described earlier. The software automatically formulates and solves the dynamic equations of
motion. Both MSC Adams and DADS
®
have integration capabilities with control simulation software
such as Simulink and SystemBuild. The engineer can take the geometrically defined models and easily
incorporate them within block diagrams created with the control system software. It is then possible to
evaluate a wide class of mechanical and control designs and estimate the system’s performance prior to
ever cutting metal.
SolidWorks provides an option for integrating the Adams simulation technology directly into the
SolidWorks environment. This interface, CosmosMotion
®
, is a physics-based motion simulation pack-
age that is fully embedded into the SolidWorks environment. The part’s geometry and mass properties
are defined inside SolidWorks. CosmosMotion reads these characteristics, along with all of the defined
constraints. The engineer specifies joint motion or forces, and the software displays the resulting forces
and/or motion of the system based on fundamental physical principles. The advantage of this approach
is twofold. First, the design and simulation is embedded in the same interface. The user is not concerned
with file transfers or compatability issues. Second, the same software package that the engineer uses to
design the robot is used to define the geometry and mass properties for the simulation. These advantages
come at a cost. A professional version of SolidWorks, at the time of this writing, is $4000. Likewise, the
CosmosMotion package is $6000.
Another option is to import the CAD model into a time domain simulation package such as Matlab
and Simulink. SimMechanics
®
provides an effortless importation of SolidWorks CAD assemblies into
the Simulink time domain simulation environment. This approach enables the ability to simulate the
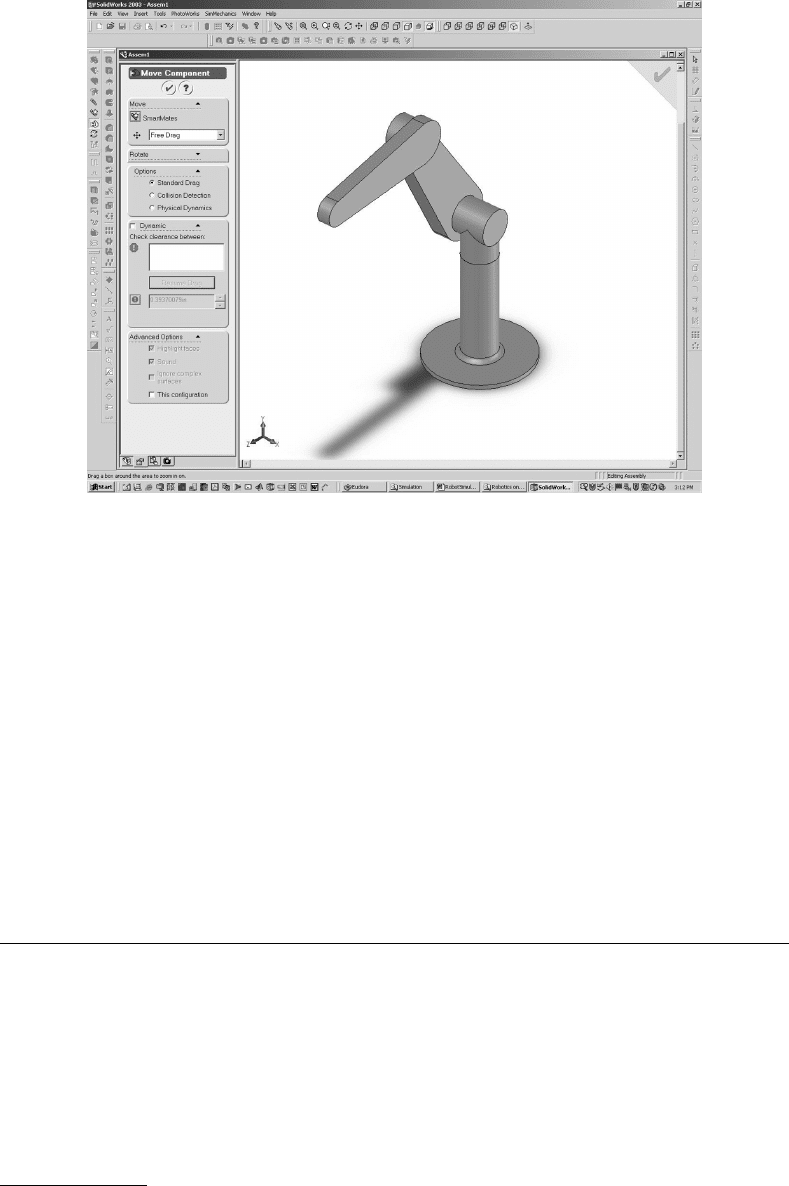
behavior of mechanical, control, and other dynamic systems. As an example, we constructed a sim-
ple three-degrees-of-freedom manipulator in the SolidWorks environment. This model, shown in
Figure 21.9, consists of four parts: a base and three links. These four parts are combined in an as-
sembly. The assembly includes the ability to define constraints (what SolidWorks calls Mates) between
parts. In the case of the robot which has three revolute joints, we require six constraints: three con-
straints forcing the joints on adjoining parts to be collinear and three constraints forcing each face on
adjoining parts to be as close as possible. Now, when moving a part, the whole assembly moves, il-
lustrating the constrained motion due to the robot’s kinematics. It is also possible to include collision
detection and restrict motion when constraints are reached. At this point, SolidWorks is restricted to
constraint detection and ranges of motion. However, when defining parts, you can include not only
the geometry but the types of materials as well (specifically the material’s density). SolidWorks, like
many CAD packages, includes the ability to compute, based upon the geometry and materials, the
resulting mass properties for each part (mass, location of center of mass, principal axes of inertia,
Copyright © 2005 by CRC Press LLC
Robot Simulation 21
-11
FIGURE 21.9 SolidWorks robot model (courtesy Oak Ridge National Laboratory).
moments of inertia...). SimMechanics takes this information, along with the constraints, derives the
dynamic equations of motion, and exports the results into a Simulink model. It is then straightforward
to include actuation forces, sensors, and control to enable a high fidelity numerical simulation of the
robot.
The minimum requirements for this approach is the cost associated with SolidWorks in addition to
Matlab ($1900), Simulink ($2800), and SimMechanics ($4000). If these prices are beyond budgetary
constraints, there are other options. First, there are software packages that are lower cost. In terms of
dynamic simulation, a professional license for ProgramCC
®,6
is $750. The lower cost is offset by reduced
flexibility. There is no graphical interface for developing simulation block diagrams as there is in Simulink
or SystemBuild. The basic package is predominately script based. It is possible to construct sophisticated
dynamic models and simulate the response of the system to various inputs, but it is not as straightforward
as with Simulink.
21.4 Build Your Own
One last possibility is to build your own simulation capabilities. The clear disadvantage is time and know-
how. Our motivation in this last section is to provide some insight into the know-how. There are a few
obvious, and not so obvious, advantages to building your own simulation package. Clearly, cost is one
consideration. If you already have a good understanding of programming, there are quite a few free or
inexpensive utilities available that can ease the process of writing a robot simulation package. Another
reason is flexibility. It is quite possible that there are no robot simulation packages available that exactly
answer your needs. If this is the case, you may need to develop your own program.
6
http://www.programcc.com/
Copyright © 2005 by CRC Press LLC
21
-12 Robotics and Automation Handbook
21.4.1 Graphical Animation
There are a number of different ways to visually display robot motion. In this section, we will focus on
where to begin if we wish to develop a package similar to the systems covered in the previous section. Many
of these packages exploit the OpenGL interface. OpenGL was originally developed by Silicon Graphics, Inc.
(SGI) as a multi-purpose, platform-independent graphical API. OpenGL is a collection of approximately
150 distinct commands that you can use to specify objects and operations needed to produce interactive
three-dimensional applications. To provide a starting point, note that OpenGL is based on object oriented
programming, C++. To efficiently develop a robot simulation package, you develop a set of classes that can
constructsimple objects such as spheres, cylinders, rectangles, andwhatever basic objects you need to define
a robot. OpenGL uses a number of vector and matrix operations to define objects in three-dimensional
space. As a simple example, the following function would draw a cube.
Void DrawCube(float x, float y, float z)
{
glPushMatrix();
glTranslatef(x,y,z);
glBegin(GL\_POLYGON);
glVertex3f(0.0f, 0.0f, 0.0f); // top face
glVertex3f(0.0f, 0.0f, -1.0f);
glVertex3f(-1.0f, 0.0f, -1.0f);
glVertex3f(-1.0f, 0.0f, 0.0f);
glVertex3f(0.0f, 0.0f, 0.0f); // front face
glVertex3f(-1.0f, 0.0f, 0.0f);
glVertex3f(-1.0f, -1.0f, 0.0f);
glVertex3f(0.0f, -1.0f, 0.0f);
glVertex3f(0.0f, 0.0f, 0.0f); // right face
glVertex3f(0.0f, -1.0f, 0.0f);
glVertex3f(0.0f, -1.0f, -1.0f);
glVertex3f(0.0f, 0.0f, -1.0f);
glVertex3f(-1.0f, 0.0f, 0.0f); // left face
glVertex3f(-1.0f, 0.0f, -1.0f);
glVertex3f(-1.0f, -1.0f, -1.0f);
glVertex3f(-1.0f, -1.0f, 0.0f);
glVertex3f(0.0f, 0.0f, 0.0f); // bottom face
glVertex3f(0.0f, -1.0f, -1.0f);
glVertex3f(-1.0f, -1.0f, -1.0f);
glVertex3f(-1.0f, -1.0f, 0.0f);
glVertex3f(0.0f, 0.0f, 0.0f); // back face
glVertex3f(-1.0f, 0.0f, -1.0f);
glVertex3f(-1.0f, -1.0f, -1.0f);
glVertex3f(0.0f, -1.0f, -1.0f);
glEnd();
glPopMatrix();
}
OpenGL uses what is called a matrix stack to construct complicated models of many simple objects. In
the case of the cube, the function first gets the most recent coordinate frame, possibly pushed onto the
stack prior to this function call. Then the function glTranslate() performs a translation on the coordinate
frame. Likewise there are functions such as glRotate() and glScale() that provide the ability to rotate and
scale the object. The glBegin() and glEnd() functions provide bounds on the definition of the verticies,
defined by the glVertex3f() function, of the object.
Your robot will consist of a number of these primitives, thus the motivation for object-oriented pro-
gramming. Animation of motion will require the coordination of these primitives. It is now clear that a
visual robot simulation program requires a combination of programming for animation (using utilities
such as OpenGL) and an understanding of robot kinematics. There are a number of references, includ-
ing this handbook, that provide excellent guidelines for writing the algorithms necessary for providing
Copyright © 2005 by CRC Press LLC
Robot Simulation 21
-13
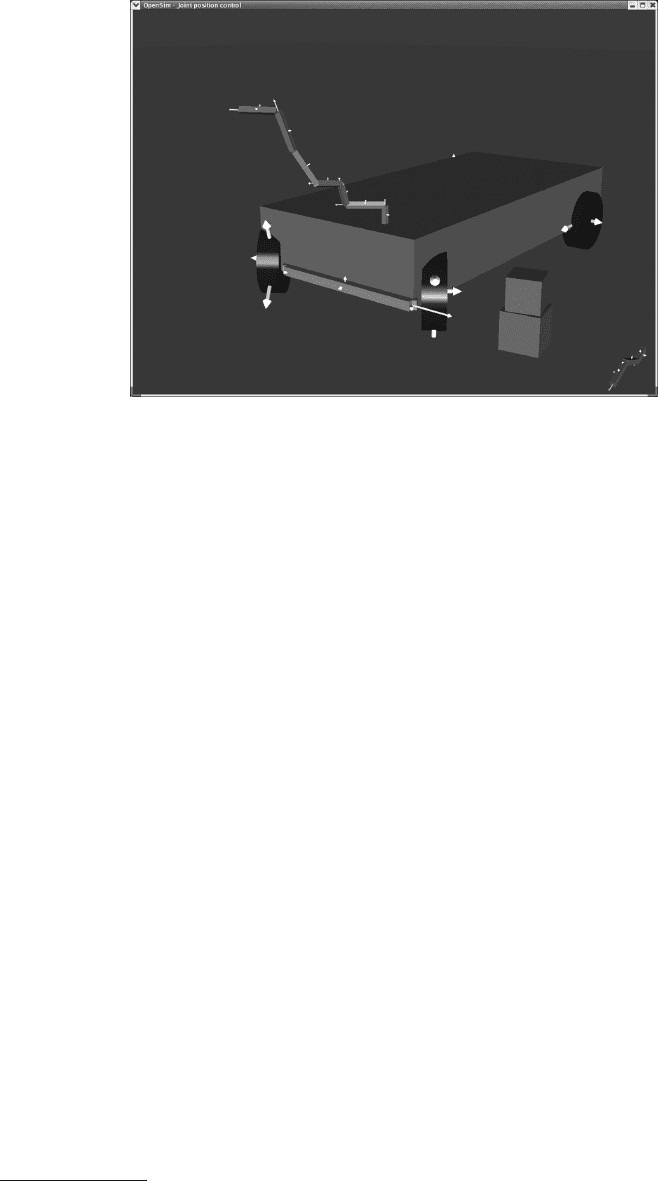
FIGURE 21.10 OpenSim simulation of vehicle and arm (courtesy of Oak Ridge National Laboratory).
coordinated motion of a robot (Asada and Slotine, 1989; Craig, 1989; Spong and Vidyasagar, 1989; and
Yoshikawa, 1990). Basically, you will have some form of interface that provides a desired motion for your
robot. This can be from a script file, mouse motion, slider bars on a dialog box, or any basic form of input
into your application. The kinematic routines will transform the desired motion of the robot into the
required transformations for each primitive or link on your robot. The results of these transformations
are passed to functions such as glTranslate() and glRotate() to provide the animation of the coordinated
motion.
Clearly, the above description is not sufficient to enable you to immediately start writing software for
robot animation. However, it does provide a good starting point. There are many examples where research
groups have used OpenGL to develop their own robot simulation package.
7,8
In addition, there are a
number of good references on programming in OpenGL (Hawkings and Astle, 2001; Woo et al., 1999).
These references, combined with the above robotics references, provide guidance on exactly how to write
software that animates objects, for example, the robot shown in Figure 21.10.
21.4.2 Numerical Simulation
InSection 21.3,webriefly describedthe utilityofprogramssuchas Simulinkand SystemBuildfor simulating
the motion of a robotic system. However, this approach required the use of a secondary software package
for computing the dynamic equations of motion. In this final section, we will describe a simple procedure
for computing the equations of motion for a serial link manipulator and embedding the dynamics in a
Simulink simulation. The basic methodology requires the use of a symbolic software package and a deeper
understanding of dynamics. The approach is based on using homogenous transforms to describe key
points on the robot: joint locations and centers of mass. Using the transformations, we construct linear
and angular velocity vectors about each center of mass. The displacement terms are used to construct a
potential energy term while the velocity terms are used in the computation of the kinetic energy. We use the
LaGrange approach to compute the resulting equations of motion. We then describe how to include joint
7
ORNL’s simulation package: http://marvin.ornl.gov/opensim/
8
Georgia Tech’s simulation package: http://www.imdl.gatech.edu/mbsim/index.html
Copyright © 2005 by CRC Press LLC

21
-14 Robotics and Automation Handbook
and tip forces as well as partitioning the equations so that they are suitable for any numerical integration
routine. While this approach is presently limited to serial link manipulators, it should give the reader a
better understanding of the mechanics associated with simulation of robot dynamics.
Two primary elements in any time domain simulation consist of the state equations and an integration
routine. The state equations are derived using basic principles in dynamics. Our objective is to formulate
the dynamics into a general form, given in Equation (21.1), where
¯
x represents a vector of states for the
system and
¯
u is a vector of control inputs. In the case of a robot, the vector
¯
x could represent the position
and velocities of each of the joints. The vector
¯
u would contain the joint forces due to the actuators driving
the robot. The equation is derived from the system’s dynamic equations of motion.
˙
¯
x = F (
¯
x,
¯
u, t)
(21.1)
During each time step of the simulation, we compute the forces driving the robot, possibly due to a
control law, and compute the derivative of the state using Equation (21.1). We then use an integration
routine to compute the state of the system,
¯
x, for the next time step. The basic elements are shown in
Figure 21.11.
Clearly, the computation of the state equations requires quite a bit of effort. The following section
provides a basic procedure for computing the dynamic equation of motion, in the state equation format
described above, for a general serial link manipulator. The approach is based on computing, symbolically,
the position and orientation of each joint and center of mass of the robot. While not necessary, we
use the Denavit-Hartenburg approach. First, as a review, the homogeneous transform is expressed using
the traditional Denavit-Hartenberg (D-H) representation found in most robotics texts where the four
quantities θ
i
(angle), α
i
(twist), d
i
(offset), l
i
(length) are parameters of link and joint i.
H
i
=
c
θi
−s
θi
c
αi
s
θi
s
αi
a
i
c
θi
s
θi
c
θi
c
αi
−c
θi
s
αi
a
i
s
θi
0 s
αi
c
αi
d
i
00 0 1
(21.2)
The conventional use of the homogeneous transform treats each subsequent transformation as a body
fixed rotation and translation.
We also assume that we can define an additional set of homogeneous transforms from each joint to
a point on each link where the associated mass properties (mass and inertia matrix) are known. So,
our basic methodology consists of using two sets of homogeneous transformations; one to describe the
pose of the arm and one to identify the displacements and velocities, both translation and rotation, of
the center of mass of each link and payload with respect to the manipulators state (joint position and
velocity). We extract from the transforms the vertical displacement of each center of mass of each link for
an expression of the total potential energy of the system. Likewise, computation of the system’s kinetic
energy is based on computing the linear and angular and velocity of each links center of gravity with
respect to the inertial frame. Once the kinetic and potential energy terms are derived, we simply use
the Matlab jacobian() command to symbolically calculate the mass matrix and nonlinear dynamic
x
des
Controller
x
=
F
(
x
,
u
,
t
)
u
t
t–Ts
x
(t) = ∫ F(
x
,
u
,
t
)
dt
+
x
(
t
–
Ts
)
x
.
.
FIGURE 21.11 General simulation block diagram.
Copyright © 2005 by CRC Press LLC

Robot Simulation 21
-15
terms following the Lagrange formulation. Symbolic packages such as Maple and Mathmatica do all the
rest.
First, the position of the center of mass for each link, with respect to the system’s inertial coordinate
system, is computed by iteratively postmultiplying each of the homogeneous transforms, starting from
the base and working to the tip of the robot.
H
i
base
= H
i−1
base
H
i
i−1
=
R
i−1
base
¯
x
i−1
base
¯
01
R
i
i−1
¯
x
i
i−1
¯
01
=
R
i
base
¯
x
i
base
¯
01
,
¯
x
i
base
=
x
i
base
y
i
base
z
i
base
(21.3)
The potential energy due to gravity for link i is the vertical component (z
i
base
in direction of gravity) of
¯
x
i
base
times the mass of the link.
V
i
= m
i
gz
i
base
(21.4)
To compute the kinetic energy, we must first derive expressions for the linear and angular velocity of the
center of gravity for each link as a function of the states of the manipulator. We have an expression,
¯
x
i
base
in Equation (21.3), for the position of the center of gravity of link i with respect to the base inertial frame.
The velocity vector
¯
v
i
is computed by multiplying the Jacobian (with respect to the combined states of the
manipulator
¯
q
i
base
)of
¯
x
i
base
, J (
¯
x
i
base
,
¯
q), by the state velocity vector,
˙
¯
q. Note from Equation (21.5), based
on the chain rule, that
¯
q
i
base
is a vector of robot joint displacements from the base of the robot (joint q
0
)
to the ith joint (q
i
).
¯
v
i
=
∂
¯
x
i
∂t
=
i
j=1
∂
¯
x
i
∂q
j
˙
q
j
(21.5)
= J (
¯
x
i
,
¯
q)
˙
¯
q where
¯
q = [q
0
q
1
...q
i
]
The rotational velocity is a little more involved but can be simplified by again using the homogeneous
transform. Starting at the base of the robot, project the net rotational velocity vector forward to the center
of mass of each link using the rotational matrix R
i
base
. Each subsequent joint consists of projecting the total
angular velocity vector of the previous joint to the current joint’s coordinate system, using the rotational
component of that joint’s homogenous transform, and adding the joint angular velocity.
¯
ω
i
=
˙
¯
q
i
+ R
i
i−1
¯
ω
i−1
(21.6)
We now have expressions for the linear and angular velocity of the center of mass for each link. The
total kinetic energy of the system is
T =
1
2
N
i=1
m
i
v
t
i
v
i
+ R
i
base
¯
ω
t
i
[I
i
]
¯
ω
i
(21.7)
where m
i
is the mass of link i and I
i
is the inertia matrix of link i about the center of gravity. As a final
step, we add external forces applied to the system. For now, we assume forces are applied only to the joints
Copyright © 2005 by CRC Press LLC
21
-16 Robotics and Automation Handbook
and tip of the robot. We use the principle of virtual work to lump these terms together.
∂W =
N
i=1
τ
i
∂q
i
+
¯
F
tip
∂
¯
x
tip
+
¯
M
tip
∂θ
tip
=
¯
τ + J
t
tip
(
¯
q)
¯
F
tip
¯
M
tip
∂
¯
q
=
¯
Q∂
¯
q
(21.8)
J
tip
(
¯
q) =
∂
¯
x
tip
base
∂
¯
q
Equation (21.4) and Equation (21.7) provide expressions for the kinetic and potential energy of the
system. We start with the classic definition of the Lagrange equations of motion.
∂
∂t
∂T
∂
˙
¯
q
−
∂T
∂q
+
∂V
∂q
=
¯
Q
(21.9)
The first term in Equation (21.9) can be expanded using the chain rule.
∂
∂t
=
∂
∂
¯
q
∂
¯
q
∂t
+
∂
∂
˙
¯
q
∂
˙
¯
q
∂t
(21.10)
Substituting Equation (21.10) into Equation (21.9),
∂
∂
˙
¯
q
∂T
∂
˙
¯
q
¨
¯
q +
∂
∂
¯
q
∂T
∂
˙
¯
q
˙
¯
q −
∂T
∂
¯
q
+
∂V
∂
¯
q
=
¯
Q
(21.11)
As with the velocity computation in Equation (21.5), we can exploit the jacobian() function in
Matlab for the evaluation of many of the terms in Equation (21.11). First, the term ∂ T/∂
˙
¯
q is the differential
of the scalar kinetic energy term with respect to the full state velocity vectordefined in Equation (21.5). This
results in the vector, L
v
, in the script files shown below. The first term in Equation (21.11) represents the
mass matrix. This expression is easily computed by taking the Jacobian on L
v
with respect to the full state
velocity vector. The remaining elements in Equation (21.11) represent the nonlinear dynamics (coriolis,
centripetal, gravitational) of the system. Thus, it should be clear that once the kinetic and potential energy
terms are defined, it is straightforward to symbolically evaluate the dynamic equations. The Jacobian for
projecting external forces to the generalized coordinates can similarly be computed using the tip position
of the robot and the Matlab jacobian() function.
This basic methodology was developed to compute the dynamics of a class of robots operating on
the deck of a ship (a moving platform). We provide two examples to verify this methodology: a simple
one-degree-of-freedom (dof) system operating on a three-dof moving platform and a three-dof system
experiencing all six degrees of motion from the sea state. The first example is simple enough to verify
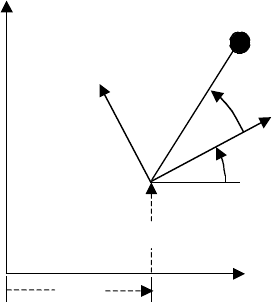
through hand calculations. The second example is more complex, yet practical. Figure 21.12 shows the
basic kinematic model of the one degree of freedom system experiencing three sea states in the X-Y plane.
We are assuming a one-dof system with mass M and rotary inertia I
z
located at the tip of a link of length L.
The system is experiencing only three of the six sea states: surge (x
s
), heave (y
s
), and pitch (θ
s
). The only
external force applied to the system is a joint torque τ , applied at joint 1. Appendix A shows the listing of
Matlab code used to generate the dynamic equations of motion. The two output variables of interest are
the MassMatrix and NLT (nonlinear terms). The resulting output is listed in Equation (21.12) and can be
Copyright © 2005 by CRC Press LLC
Robot Simulation 21
-17
M, I
z
L
x
s
y
s
θ
s
θ
1
X
s
Y
s
X
a
Y
a
FIGURE 21.12 One DOF model.
easily verified by the reader. Clearly, for this simple case, there is not a great advantage to using a symbolic
package over hand calculations.
MassMatrix = ML1
2
+ I
1z
NLT = ML1
2
¨
θ
p
+ I
1z
¨
θ
p
+ ML1 cos(θ
p
+ θ
1
)
¨
y
s
− ML1 sin(θ
p
+ θ
1
)
¨
x
s
+MgL1 cos(θ
p
+ θ
1
)
combining
(21.12)
(ML1
2
+ I
1z
)(
¨
θ
1
+
¨
θ
p
) +ML1 cos(θ
p
+ θ
1
)
¨
y
s
− ML1 sin(θ
p
+ θ
1
)
¨
x
s
+MgL1 cos(θ
p
+ θ
1
) = τ
1
The power of this approach is more evident as we progress to more complex systems. First, all that is
required is the definition of joint transformations. All of the differentiation for velocity and acceleration
terms is handled by the symbolic computational package (such as Maple or Mathematica). As a second
example, we derive the dynamic equations of motion for the three-dof system, shown in Figure 21.12,
with the full six-dof from the sea state. A listing of the Matlab code used for computing the dynamics of
this system on the deck of a ship is shown in Appendix B. It should be clear comparing the listings in
Appendix A and Appendix B that there is only a slight difference in the formulation of the transformations,
but the methodology for deriving the dynamics is the same. The resulting equations of motion can be
partitioned into a compact form, Equation (21.13),
M
rr
M
rs
M
t
rs
M
ss
¨
¯
q
r
¨
¯
q
s
+
NLT
r
NLT
s
=
¯
Q
r
¯
0
+
J
t
(q
r
)F
ext
¯
0
(21.13)
where M
rr
is the 3×3 mass matrix for the robot with respect to the robot’s state acceleration, M
ss
is the 6×6
mass matrix of the robot with respect to the sea state acceleration, M
rs
is the inertial coupling of the sea
state to the robot state, NLT
r
is a 3 ×1 vector of the nonlinear terms (gravitational, Coriolis, centripetal)
as a function of both the robot’s state and the sea state, Q
r
is the joint force input vector to the system, F
ext
is an external force vector applied to the end effector, and J
t
(q
r
) is the Jacobian from the end effector to
the joint space. In order to include the dynamic equations of motion in Simulink, we use Equation (21.14)
to solve for the acceleration of the robot’s state vector as a function of all of the inputs (external forces and
joint torques), system state (position and velocity), and external disturbances (sea state position, velocity,
Copyright © 2005 by CRC Press LLC
21
-18 Robotics and Automation Handbook
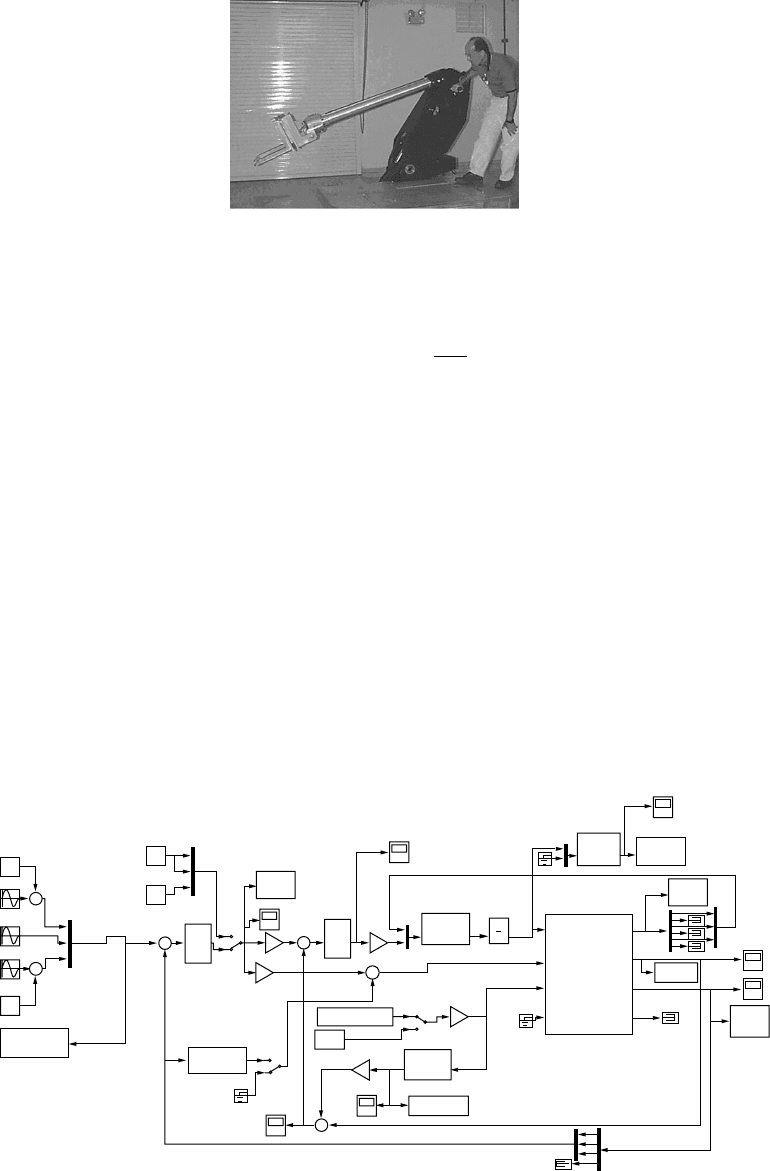
FIGURE 21.13 Force controlled hydraulic manipulator (courtesy Oak Ridge National Laboratory).
and acceleration). This expression is in the same form as Equation (21.1).
¨
¯
q
r
= M
−1
rr
{
¯
Q
r
+ J
t
(
¯
q
r
)
¯
F
ext
− NLT
r
− M
rs
¨
¯
q
s
} (21.14)
While the output of the single degree of freedom case can be listed in Equation (21.12), the results of
the dynamic equations of motion for the second system generates 84 pages of C code and would require
considerable effort to derive by hand. Fortunately, the code can be directly imported into Simulink through
the S-Function builder. The motivation for computing the dynamics equations of motion are threefold.
First, by having the dynamics in a symbolic form, it is possible to aid in the design process, changing
parameters to optimize the system. Second, a model of the system dynamics can aid in increasing the
fidelity of simulation for control design and analysis. Finally, there is no doubt about how the simulation
derived the system’s equations of motion.
The system modeled in this investigation is displayed in Figure 21.13. This system has a 500-lb payload
capacity and has threeactivedegrees of freedom.The actuator models include nonlinear dynamic modeling
of the hydraulic system (servo-valve orifice equations, asymetric cylinders, fluid compliance ...),controls,
and the dynamic equations of motion computed above.
The hydraulic actuator models generate force as a function of the servovalve current, actuator position,
and velocity. The Simulink model of the full system, including the sea state inputs, hydraulic models,
controls, and dynamic equations of motion, is shown in Figure 21.14.
+
-c-
-c-
k- ku
-c-
Sine Wave
Sine Wave1
Sine Wave2
+
+
+
+
×
×1
z
z1
Human Hand
Position
o
−−
+
Human
Stiffness
In1
Out1
In1
Out1
Subsystem
Subsystem 3
Subsystem 2
Subsystem1
Human
Force
To Workspace
1
alfa
accomodation
calo LDRD Joint Velocity
MATLAB
Function
MATLAB
Function
MATLAB
Function
1
s
Des Tip
Position
Des Joint
Position
Joint
States
Joint
States
TipForce
Tip Force
Tip
Position
Tip
Position
switch 3
switch1
switch
[time,sea_state]
Sea State
Out 1
1
1
Comp Force
Comp Sea Force1
Tip Pos.
Env. Force
atrix
+
+
Sea State
Ext Tip
Force
ID_
command
Actuator
Force
LDRD Arm
–
–
FIGURE 21.14 HAT simulation model (courtesy Oak Ridge National Laboratory).
Copyright © 2005 by CRC Press LLC
Robot Simulation 21
-19
Step
ID_command
Des Joint
Position
External Forces
applied to tip of robot
Ext Tip Force
Sea State
Double click
here for
information on
this demonstration
k-
+
+
−
−
+
−
In
Out1
In
Out1
In
Out1
Joint Controllers
Gc 1
Gc 2
Gc 3
Hydraulics
xv1
xv2
xv3
t1
t2
t3
F1
F2
F3
q1&
q1_d
x2&
x2_d
x3&
x3_d
1
Gain 2
4
Actuator
Force
S-function that
has full nonlinear
equations of motion
Torques States
Ext Forces
Tip
Force
Tip Force
Sea State
Subsystem
Joint
States
1
2
theta_to_L
theta_to_L
S-Function
Builder 1
S-Function
Builder
k-
k-
k-
Jt1 Angle
Jt2 Angle
Jt3 Angle
xv4
1
4
3
2
3
Tip Position
MATLAB
Function
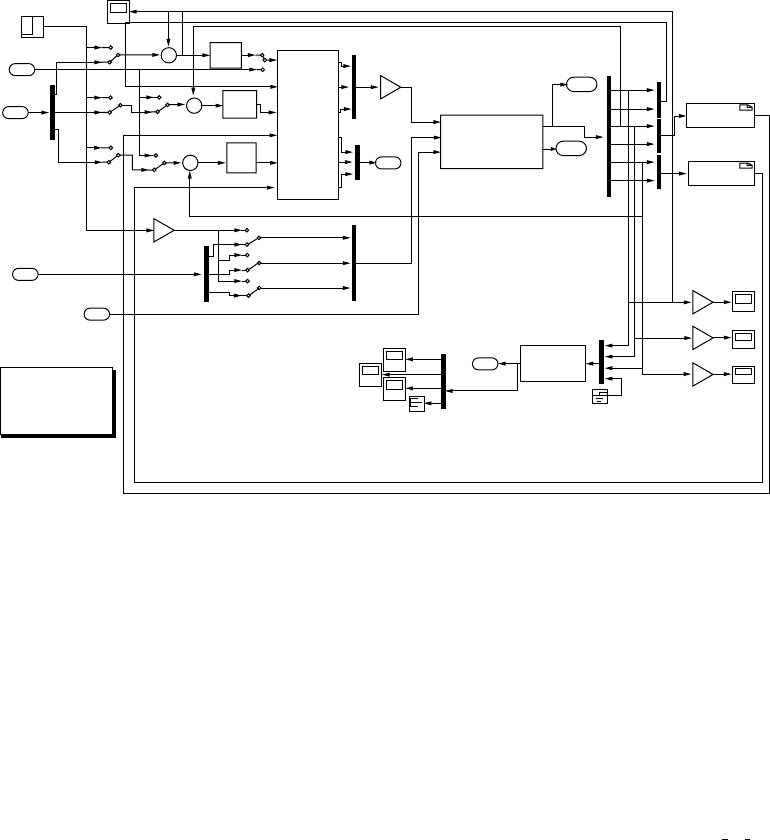
FIGURE 21.15 Details of HAT controller and manipulator model.
The nonlinear model of the hydraulic manipulator, shown as the LDRD arm block in Figure 21.14,
is expanded in Figure 21.15. The inputs to the model include the desired joint positions, the eighteen
elements of the sea state (displacement, velocity, and acceleration of roll, pitch, yaw, heave, surge, and
sway), and the external force applied to the robot. In addition, this model includes auxiliary inputs for
system identification.
There are two primary blocks to note in Figure 21.15. The first is the system dynamics block. This
contains the C code generated previously that represents the forward dynamics of the LDRD arm. The
second is the hydraulics block. From the expanded hydraulics block, each of the three joints has two
primary elements: the servo valve and the actuator. In the case of the second and third joints, there is
also a transmission associated with the coupling of the linear actuator with the joint (the two “theta
to L”
blocks in the upper right). The servo valve models are based on the full nonlinear orifice equations and
regulate the fluid flow to the actuators as a function of excitation signal (command to the moving coil
on the servo vavle), the supply, and return pressure, as well as the pressure on both sides of the actua-
tor. The actuator model generates a force based on the position, velocity, and bulk modulus (stiffness)
of the fluid. The position and velocity of the actuator come from the dynamic model of the manipu-
lator. The force from the actuator is the excitation to the dynamic model of the manipulator. It should
now be clear that the full nonlinear behavior of the manipulator is embodied in the simulation of the
manipulator.
To complete our example, we now consider the impact sea state has on the performance of a force
controlled system. Inputs to the system consist of a human command regulating about a single point and
a sea state with conditions commensurate with a destroyer moving at 20 knots in sea state 5. Figure 21.16
shows the force provided by the human while attempting to regulate the tip position. There is the expected
DC bias on the Z-direction force required to offset the gravitational load. The system is used for strength
amplification. The human only senses a fraction of the total payload weight. For this example, the payload
weight is 2224 N which projects to a human force of 22.4 N when in static equilibrium with a 100:1
force amplification ratio. However, during the 120 sec simulation run, the maximum perturbation felt by
Copyright © 2005 by CRC Press LLC