Kurfess T.R. Robotics and Automation Handbook
Подождите немного. Документ загружается.

20
-2 Robotics and Automation Handbook
(a)
(b)
(c)
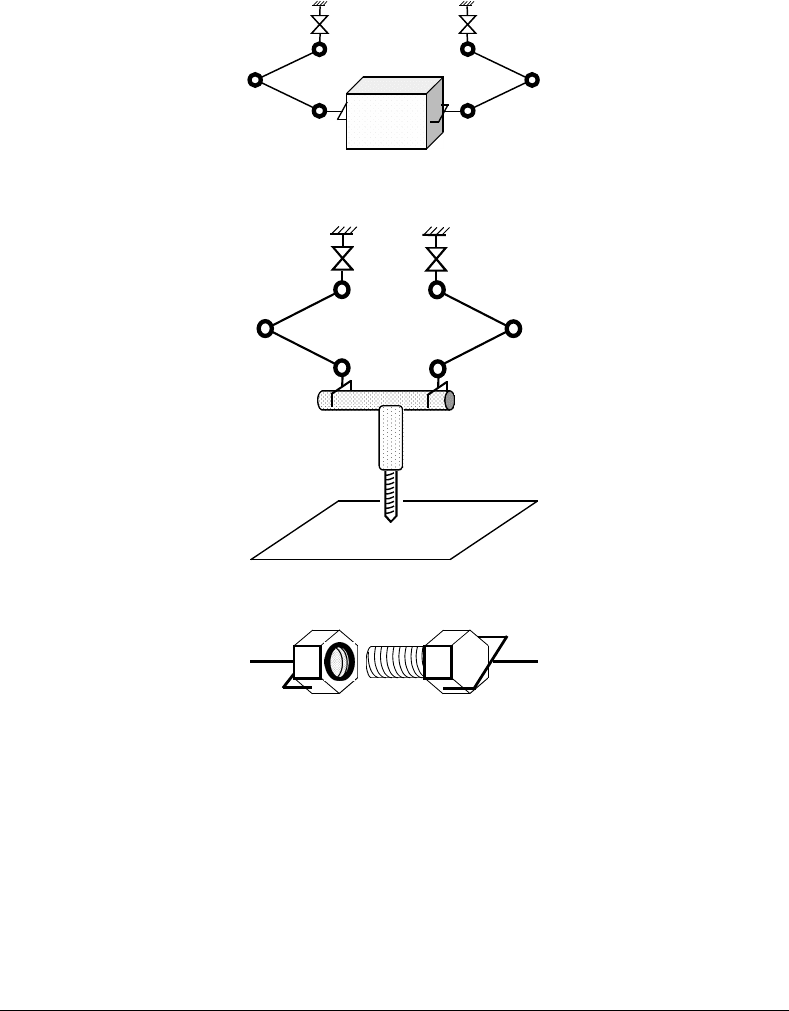
FIGURE 20.1 Tasks of manipulators: (a) load capacity, (b) rigidity, and (c) dexterity.
In this chapter, we first consider problems of coordinated motion control of multiple manipulators
having physical interaction among the manipulators including an object. Then, we outline several types of
controlalgorithmsfor multiple manipulators for handling an object in coordination.The impedance-based
motion control algorithm is introduced for the manipulation of an object in coordination and the assembly
of two parts. Finally, we introduce decentralized control algorithms of multiple mobile manipulators in
coordination.
20.2 Manipulation of an Object
Consider motion of an object supported by multiple manipulators. Suppose that n manipulators grasp
an object rigidly and each manipulator applies force/moment to the object as shown in Figure 20.2. We
define coordinate systems as shown in Figure 20.3 and several parameters as follows:
O
u
− x
u
y
u
z
u
absolute coordinate system
O
0
− x
0
y
0
z
0
object coordinate system
O
hi
− x
hi
y
hi
z
hi
ith arm coordinate system
r
0
∈ R
3
position vector from the origin of the absolute coordinate system
to the origin of the object coordinate system
Copyright © 2005 by CRC Press LLC

Coordinated Motion Control of Multiple Manipulators 20
-3
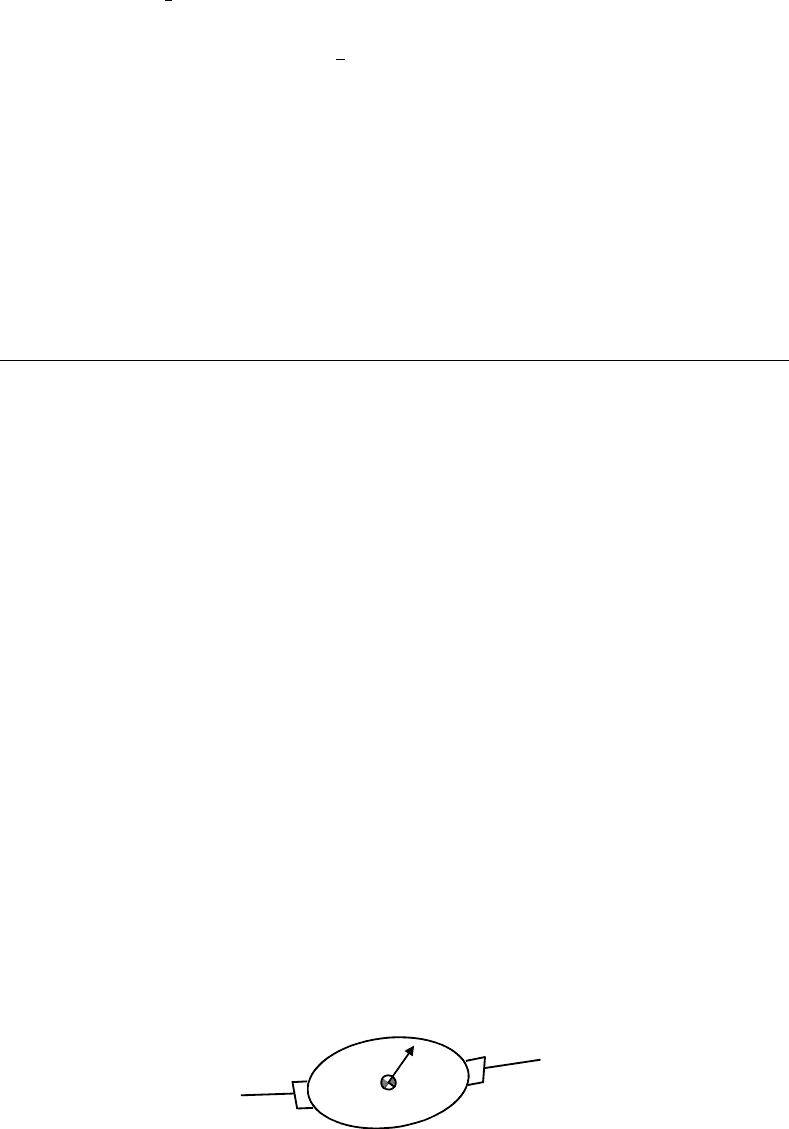
Object Trajectory
Force/moment
FIGURE 20.2 Manipulation of an object.
v
0
∈ R
3
linear velocity of the object
w
0
∈ R
3
angular velocity of the object
m mass of the object
M ∈ R
3
inertia matrix of the object
g ∈ R
3
acceleration of gravity
I
N
∈ R
N×N
N × N identity matrix
As is well known, the motion equation of an object supported by multiple manipulators is expressed as
follows:
m
¨
r
0
= F
0
+ mg
(20.1)
M
˙
w
0
+ w
0
× (Mw
0
) = N
0
(20.2)
where F
0
and N
0
are the resultant force and the resultant moment applied to the object by all manipulators
and are expressed as follows:
F
0
=
n
i=1
F
i
(20.3)
N
0
=
n
i=1
N
i
(20.4)
x
u
y
u
Absolute Coordinate System
ith Arm Coordinate System
ith Arm
Object Coordinate System
z
u
O
u
O
0
x
0
y
0
z
0
x
hi
y
hi
z
hi
o
hi
r
0
FIGURE 20.3 Coordinate systems.
Copyright © 2005 by CRC Press LLC
20
-4 Robotics and Automation Handbook
F
i
and N
i
are the force and the moment applied to the object by the ith manipulator in the object coordinate
system with respect to the absolute coordinate system. Note that the motion of the object is generated
based on the force F
0
and the moment N
0
, which are the resultant force and the resultant moment applied
to the object by the manipulators.
Putting Equation (20.1) and Equation (20.2) together, we have the following equation:
L =
mI
3
0
0 M
¨
r
0
l
˙
w
0
+
−mg
w
0
× (Mw
0
)
(20.5)
where
L ≡
F
0
N
0
(20.6)
F
0
and N
0
are also expressed as
F
0
N
0
= KF (20.7)
where
K = [I
6
I
6
···I
6
] ∈ R
6×6n
(20.8)
F =
F
T
1
N
T
1
F
T
2
N
T
2
···F
T
n
N
T
n
T
∈ R
6n
(20.9)
When each manipulator applies the force F
i
and the moment N
i
to the object, the resultant force F
0
and
the resultant moment N
0
applied to the object by all of the manipulators are shown by Equation (20.3)
and Equation (20.4). Thus, the motion of the object is defined uniquely by Equation (20.5) based on
the resultant force and the resultant moment applied to the object coordinate system with respect to the
absolute coordinate system.
On the other hand, when the motion of the object is generated by multiple manipulatorsin coordination,
we cannot determine uniquely the force F
i
and the moment N
i
, which are applied by each manipulator
to the object from Equation (20.7), although we can derive the resultant force and the resultant moment
applied to the object by all of the manipulators. The force/moment in the null space of K represented by
Equation (20.8) is referred to as the internal force/moment [3]. The internal force/moment is the force
and the moment that do not contribute to the motion of the object.
The solution of Equation (20.7) depends on how to distribute the load required for the manipulation
of the object among the manipulators and how to apply the internal force/moment to the object. The
following shows an example of the solutions of Equation (20.7) for the dual manipulators case (n = 2)
proposed by Uchiyama [3].
Solving Equation (20.7) using the generalized inverse matrix, we have the following equation:
F = W
−
L + [I
6
− I
6
]
T
ξ (20.10)
where ξ(∈R
12
)isanyvectorandW
−
is the generalized inverse matrix defined as
W
−
=
R
I
6
− R
(20.11)
From W
−1
L in Equation (20.10) and Equation (20.11), we can see that the load of the manipulator L is
distributed to two manipulators based on ratio of R : I
6
− R.
Copyright © 2005 by CRC Press LLC
Coordinated Motion Control of Multiple Manipulators 20
-5
When we distribute the load of the manipulator L equally to two manipulators, we can solve Equa-
tion (20.7) with R =
1
2
I
6
as
F =
1
2
I
6
I
6
L +
I
6
−I
6
ξ (20.12)
In the general case (n ≥ 3), we can solve Equation (20.7) using the pseudo inverse matrix of K , K
+
as
F = K
+
L + (I
6n
− K
+
K )ξ (20.13)
The second terms on the right hand sides of Equation (20.10), Equation (20.12), and Equation (20.13) do
not influence the force/moment applied to the object; that is, these terms do not affect the motion of the
object. By using these terms, we can specify the internal force/moment applied to the object.
20.3 Coordinated Motion Control of Multiple Manipulators
for Handling an Object
When multiple robots manipulate a single object in coordination as shown in Figure 20.2, we have to
consider the following problems:
(1) How to grasp the object
(2) How to generate the motion of the object
(3) How to apply the internal force/moment to the object
(4) How to distribute the load of the object among robots
In this section, we consider the problems of (2), (3), and (4), under the assumption that the manipulators
grasp the object firmly and can apply the force/moment to the object arbitrarily.
20.3.1 Motion of Object and Control of Internal Force/Moment
Many researchers have discussed the coordinated motion control problems of multiple manipulators.
Roughly speaking, the coordinated motion control algorithms for manipulators proposed so far could
be classified into five types: the master-slave type of control algorithms, the hybrid type of control algo-
rithms, the compliance-based control algorithms, the object dynamics–based control algorithms, and the
augmented dynamics–based control algorithms. In this section, we briefly introduce the outlines of these
control algorithms.
1. Master-slave type of control algorithms [1,4]: Master-slave type of control algorithm has been
proposed by Nakano [1] as the pioneering research of multiple robots coordination. In this method,
a manipulator referred to as a master controls the pose of the object based on the position control
law, and the other manipulators referred to as slave control the force/moment applied to the object
based on the force control law as shown in Figure 20.4. This method controls the position of
the object and the force/moment applied to the object precisely. In this method, however, the
distribution of the load among robots could not be realized appropriately. The servo stiffness of
Force Control
Position Control
Master Arm
Slave Arm
FIGURE 20.4 Master-slave type of control algorithm.
Copyright © 2005 by CRC Press LLC

20
-6 Robotics and Automation Handbook
Compliance/Impedance Compliance/Impedance
FIGURE 20.5 Compliance based control algorithm.
the position-controlled master manipulator is very high, the servo stiffness of the force-controlled
slave manipulators is almost zero, and the object is supported through the stiffness. Eventually,
the position-controlled master manipulator has to support the entire load required for the object
motion.
2. Hybrid type of control algorithms [5–7]: To control the motion of the object in 3D space, the robot
has to have six degrees of freedom (6-DOF). In addition, to control the internal force/moment
applied to the object, the robot has to have 6-DOF. In the hybrid type of control algorithms,
multiple robots control the 6-DOF with respect to the motion of the object and the 6-DOF with
respect to the internal force/moment applied to the object by using the 6n-DOF of n manipulators.
This type is similar to the hybrid position/force control algorithm and is regarded as a general-
ization of the master-slave type of control algorithm. Takase [5] has proposed this type of control
algorithm, which is derived based on how to constrain the motion of the object by manipulators. In
the practical use of this method, however, we have to consider several problems such as position and
orientation errors among the coordinate systems of manipulators or kinematic modeling errors
of each robot and the manipulated object. Unless we could control the manipulators exactly, the
manipulators might apply excessive internal force/moment to the object.
3. Compliance-based control algorithms [2,8,9]: In the compliance-based control algorithm, the
object is compliantly grasped through manipulator compliances or impedances realized by the
hardware or the software as shown in Figure 20.5. This type of control algorithm is robust against
the kinematic modeling errors of the manipulators and the object. Even if the modeling errors
exist, the robots would not apply the excessive internal force/moment to the object. The effect of
the modeling errors is reduced by the compliances or the impedances, through which the robots
control the position/orientation of the object and the internal force/moment applied to the object.
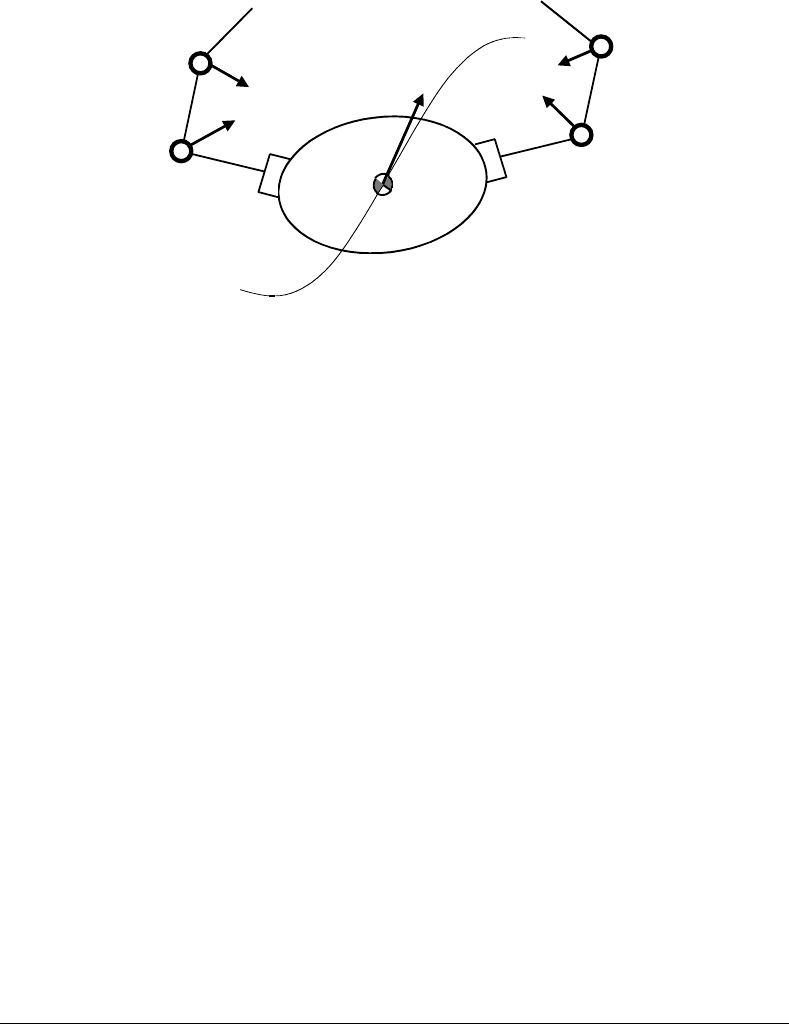
4. Object dynamics–based control algorithms [10]: In this algorithm, the motion of the object is
controlled dynamically based on Equation (20.5), under the assumption that the robots could be
regarded as actuators which generate the force/moment at grasping points of the object as shown in
Figure 20.6. The control algorithm has been proposed by Nakamura et al. [10]. When the mass of
the manipulated object is small, the precise manipulation of the object is not easy. To manipulate the
Object Trajectory
Force ActuatorForce Actuator
Resultant Force
FIGURE 20.6 Object dynamics–based control algorithm.
Copyright © 2005 by CRC Press LLC
Coordinated Motion Control of Multiple Manipulators 20
-7
Object Trajectory
Force Actuator
Force Actuator
Desired Motion
Joint Input
Joint Input
FIGURE 20.7 Augmented dynamics–based control algorithm.
object with small mass, the manipulators have to apply small force/moment to the object precisely.
In the practical robots; however, it is difficult to apply the small force/moment precisely to the
manipulated object at their grasping points.
5. Augmented dynamics–based control algorithm [11]: This control algorithm has been proposed
by Khatib [11]. This is an extension of their hybrid position/force control algorithm based on
the manipulator dynamics at its endeffector. They derived a resultant dynamics including the
manipulator dynamics and the object dynamics at the representative point of the object as shown
in Figure 20.7. Then, they designed a hybrid position/force control algorithm so that both the
pose of the object and the force/moment applied to the object are controlled. Note that they do
not consider the internal force/moment applied to the object, but they do consider force/moment
applied among grasping points.
20.3.2 Load Sharing Problem
When two manipulators manipulate an object, the load sharing between them is realized based on Equa-
tion (20.10). Several researches for the load sharing have been proposed so far. Zheng and Luh [12] have
proposed an optimal algorithm for load distribution with minimum exerted forces on the object. These
algorithms require less computational time, which makes them attractive for real-time applications. The
adaptive load-sharing controller developed by Pittelkau [13] optimizes the distribution of joint torques
over two manipulators to increase the efficiency and combined load-carrying capacity of the two ma-
nipulators. Uchiyama and Yamashita [14] have considered the adaptive load sharing of two cooperative
manipulators holding a common object from the viewpoint of robustness of the holding.
20.4 Coordinated Motion Control Based on Impedance
Control Law
In this section, we introduce the control algorithm based on the impedance control to realize the handling
of a single object and the assembly of two parts.
20.4.1 Design of Impedance for Handling an Object
Kosuge et al. have proposed a coordinated motion control algorithm of manipulators handling an object
based on impedance control of each manipulator [9,15]. In the algorithm based on the impedance control
law, the object is supported by multiple manipulators that are controlled so as to have impedance dynamics
Copyright © 2005 by CRC Press LLC

20
-8 Robotics and Automation Handbook
FIGURE 20.8 Compliant support of object.
around desired trajectories of their endeffectors as shown in Figure 20.8. The compliant support of the
object using mechanical impedance is used for decreasing the modeling errors of the robot system.
In this section, we are going to reconsider the algorithm and introduce an alternative coordinated
motion control algorithm of manipulators handling an object in coordination, so that we can control a
mechanical impedance of a manipulated object as well as the external force/moment sharing of the object
among the manipulators.
First, let us consider a control problem of an apparent mechanical impedance of the manipulated object
by multiple manipulators. We consider a problem to realize a mechanical impedance of the object around
its desired compliance center as shown in Figure 20.9. We assume that each manipulator supports the
object rigidity with its mechanical impedance around offset force/moment required for the manipulation
of the object which consists of the desired internal force/moment and the shared load.
Let the mechanical impedance of the object be expressed by the following equation:
M
¨
x + D
˙
x + K x = F
ext
(20.14)
where x is the deviation of the manipulated object from the desired trajectory of the compliance center
of the object, F
ext
is the external force/moment applied to the object around its desired compliance center,
and M, D, K are 6 × 6 positive definite matrices.
We assume that each manipulator graspsthe object firmly and that no relative motion between the object
and each manipulator exists. To realize the impedance of the manipulated object, we consider the case in
which each manipulator is controlled, based on the impedance control law around the desired compliance
center of the object as shown in Figure 20.9. Let the mechanical impedance of the ith manipulator around
the desired compliance center of the object be expressed by
M
i
¨
x
i
+ D
i
˙
x
i
+ K
i
x
i
= F
ei
(20.15)
x
3
x
2
x
1
FIGURE 20.9 Desired object impedance.
Copyright © 2005 by CRC Press LLC
Coordinated Motion Control of Multiple Manipulators 20
-9
where F
ei
istheexternalforce/momentapplied tothe ithmanipulatoraroundthedesiredcompliancecenter
of the object and x
i
is the deviation of the compliance centerof the ith manipulator. Fromthe assumption
that there is no relative motion between each manipulator and the object, we have the following relation:
x = x
i
(i = 1, 2, ..., n) (20.16)
The external force/moment F
ext
is shared by each manipulator which is as follows:
F
ei
= δ
i
F
ext
(i = 1, 2, ..., n) (20.17)
whereδ
i
> 0. Concerned withtheexternalforce/momentappliedtothe object, thefollowing relationholds:
n
i=1
F
ei
= F
ext
(20.18)
and we have
n
i=1
δ
i
= 1(δ
i
> 0) (20.19)
From these equations, we obtain the mechanical impedance of each manipulator, whichis necessary to real-
ize the desired mechanical impedance of the manipulated object expressed by Equation (20.14), as follows:
M
i
= δ
i
M (i = 1, 2, ..., n)
(20.20)
D
i
= δ
i
D (i = 1, 2, ..., n) (20.21)
K
i
= δ
i
K (i = 1, 2, ..., n) (20.22)
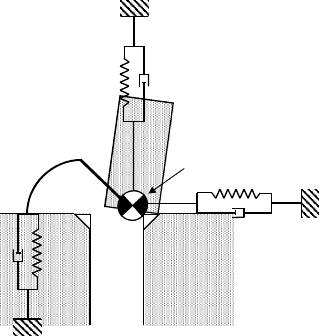
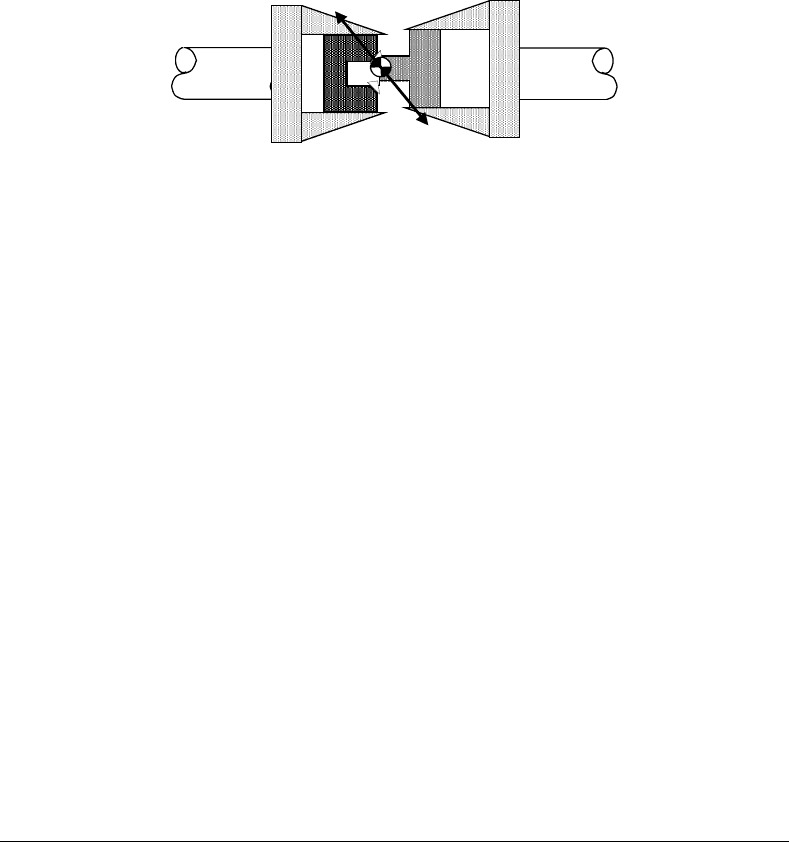
20.4.2 Design of Impedance for RCC Dynamics
As shown in Figure 20.10, the remote compliance center (RCC) is a well-known device for realizing the
assembly tasks of two parts. We are going to consider realizing a dynamic motion of the RCC between
two parts by using dual manipulators. Let the dynamics of the RCC device be expressed by the following
equation:
M
RCC
¨
x + D
RCC
˙
x + K
RCC
x = F (20.23)
where M
RCC
, D
RCC
, K
RCC
are 6 ×6 positive definite matrices.
Peg
Hole
Compliance Center
FIGURE 20.10 Remote compliance center.
Copyright © 2005 by CRC Press LLC
20
-10 Robotics and Automation Handbook
Arm 1
Arm 2
F
1
−
F
2
FIGURE 20.11 Assembly task of two parts by two arms.
Suppose that each manipulator has the same impedance structure as the one of the RCC device and let
the impedance of each manipulator be expressed by the following equations:
M
1
¨
x
1
+ D
1
˙
x
1
+ K
1
x
1
= F
1
(20.24)
M
2
¨
x
2
+ D
2
˙
x
2
+ K
2
x
2
= F
2
(20.25)
The force/moment applied to each manipulator has the following relation as shown in Figure 20.11.
F
1
=−F
2
(= F )
(20.26)
From Equation (20.23), Equation (20.24), and Equation (20.25), we have
x =x
1
− x
2
(20.27)
M
1
= M
2
= 2M
RCC
(20.28)
D
1
= D
2
= 2D
RCC
(20.29)
K
1
= K
2
= 2K
RCC
(20.30)
By specifying the impedance parameters expressed in Equation (20.28), Equation (20.29), and Equa-
tion (20.30), the impedance dynamics expressed in Equation (20.23) is realized between two parts sup-
ported by two manipulators. Under the assumption that we could design the impedance dynamics appro-
priately for realizing the assembly tasks of two parts, two manipulators could realize the assembly tasks
successfully.
20.5 Decentralized Motion Control of Multiple
Mobile Manipulators
In this section, we consider the case of multiple mobile manipulators handling an object in coordination. As
explained below, the coordination of multiple mobile manipulators has several control problems different
from the coordination of multiple manipulators. We briefly introduce the concept of a leader-follower
type of control algorithm designed for multiple mobile manipulators for handling a single object in
coordination as an example of the solution.
20.5.1 Multiple Mobile Manipulators
The mobile manipulators are expected to do tasks in an ordinary environment. Mobility is an important
function to cover the working space in the ordinary environment. In the ordinary environment, multiple
small robots are more appropriate than a large and heavy robot because the small robot has less kinetic
energy than the large and heavy one. When they are moving with the same speed, the small one is less
harmful to a human if its collisions occur.
As mentioned above, much research has been done for the motion control of multiple robots. However,
most of the control algorithms proposed so far are designed based on the centralized control system; that
Copyright © 2005 by CRC Press LLC
Coordinated Motion Control of Multiple Manipulators 20
-11
is, a single controller is supposed to control all of the robots in a centralized way based on the global
information. The centralized control system may be effective in case of the coordinated motion control of
manipulators since the number of the manipulators in coordination is usually limited to two or three.
The use of mobile manipulators in the real world is one of the challenging topics in recent years [16–18].
Considering the case where such mobile manipulators transport a single object in coordination, a single
controller could not control a large number of robots because of the real-time communication problem
around the robots and the computational burden of the single controller. A centralized controller is no
more realistic to control a large number of mobile manipulators.
In addition, deferent from the case of the manipulator, the dead reckoning system of a mobile manipula-
tor is not so reliable, because the mobile manipulator has a slippage between its wheels and the ground and
we could not position the mobile manipulator precisely. Therefore, we could not apply the same control
principle of manipulators for controlling the multiple mobile manipulators, and the control system of the
mobile manipulators has to be redesigned robust against the inevitable positioning error of each mobile
manipulator.
20.5.2 Leader-Follower Type Control Algorithm
Many control algorithms have been proposed for the handling of a single object by multiple robots in
coordination. Most of these control algorithms proposed so far have been designed under the assumption
that the geometric relations among the robots are known precisely. However, it is not easy to know
the geometric relations among them precisely, especially when the robots handle an unknown object in
coordination in a real environment.
Errors in position/orientation of each mobile robot detected by a dead reckoning system are inevitable
because of a slippage between a mobile mechanism and the ground. In addition to that, even if we knew
geometric relations among the robots, the geometric relations could not be kept precisely any more because
of the errors included in position/orientation information of each robot. To overcome these problems, we
have to design a coordinated motion control algorithm robust against the inevitable positioning errors.
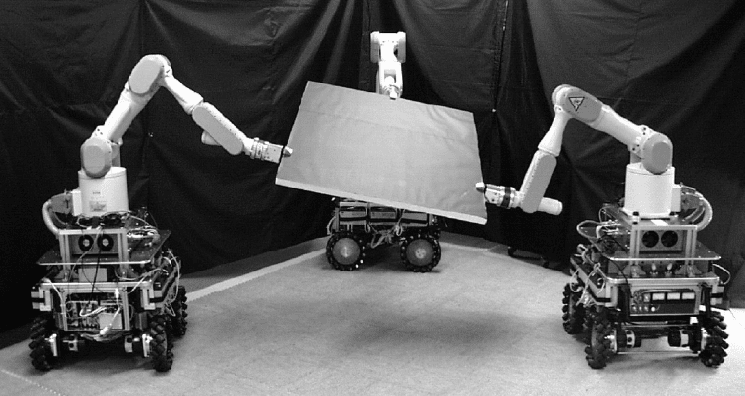
Kume et al. [18] have proposed the leader-follower type control algorithm of multiple mobile manipu-
lators for handling a single object in coordination as shown in Figure 20.12. In this algorithm, the desired
trajectory of the object is given to one of the mobile manipulators, referred to as a leader, and the other
robots, referred to as followers, are controlled so as to have a virtual caster-like dynamics. The followers
FIGURE 20.12 Coordination of multiple mobile manipulators.
Copyright © 2005 by CRC Press LLC