Kurfess T.R. Robotics and Automation Handbook
Подождите немного. Документ загружается.


Sliding Mode Control of Robotic Manipulators 18
-5
where >0 is the boundary layer thickness. ε = /λ
n−1
is the corresponding boundary layer width,
whereλ is the design parameter of the sliding surface (18.2) for the case λ
1
= λ
2
=···=λ
n
. The switching
control law (18.5) remains the same outside the boundary layer, and inside b
L
(t) the control action is
interpolated by using, e.g., u
sw
= s/ , providing an overall piece-wise continuous control law. This creates
an upper bound in tracking error given by λ (as opposed to perfect tracking): ∀t ≥ 0, |x
(i)
(t) −r
(i)
(t)|≤
(2λ)
i
ε; i = 0, ..., n − 1, for all trajectories starting inside b
L
(t). The boundary layer thickness can be
made time-varying to tune up the control law to exploit the control bandwidth available, and in that case
the sliding condition (18.4) becomes
|s(x, t)|≥ ⇒
1
2
d
dt
s
2
≤ (
˙
− η)|s(x, t)|
(18.13)
A simple switching term that satisfies (18.13) is
u
sw
= (k(x, t) −
˙
) sat
s
, sat(z) =
z, |z|≤1
sgn(z), otherwise
(18.14)
which replaces Equation (18.5). This method eliminates control chatter provided that high-frequency
unmodelled dynamics are not excited [3] and that the corresponding trade-off in tracking accuracy is
acceptable.
The equivalent control (u
eq
) [3, 5, 9] is the continuous control law that would maintain dS/dt = 0
if the dynamics were exactly known. Consider the nonlinear affine system (18.15) and (18.16) with the
associated sliding surface (18.17):
˙
x
1
=
f
1
(x
1
, x
2
) (18.15)
˙
x
2
=
f
2
(x
1
, x
2
) + B
2
(x)u + B
2
(x)
d(t)
(18.16)
S =
{
x : ϕ(t) −s
a
(x) =s(x, t) = 0
}
(18.17)
where u is the m ×1 vector of control inputs,
d is the m ×1 vector of input disturbances, x
2
is the vector
of m states to be controlled, x
1
is the (n −m) vector of autonomous states,
f is the n ×1vectorofsystem’s
equations, B
2
(x)isam × m input gain matrix, s
a
(x)isam × 1 continuous function of the states to be
tracked, and ϕ(t) is the m ×1 vector of desired trajectories. The equivalent control is obtained from
d
dt
(ϕ(t) −s
a
(x, u =u
eq
)) = 0 (18.18)
by calculating dS/dt =0 from Equation (18.18), replacing the system’s Equation (18.15) and Equa-
tion (18.16) in the resulting expression, and finally solving for u
eq
. This yields
u
eq
=−
d + (G
2
B
2
)
−1
d ϕ
dt
− G
2
f
2
− G
1
f
1
(18.19)
where ds
a
/dt = G
1
x
1
+ G
2
x
2
and G
1
, G
2
are defined as [∂s
a
/∂ x
1
] = G
1
,[∂s
a
/∂ x
2
] = G
2
.
The continuous control (18.19) is a nonrobust control law because it assumes the plant model to be
exact. Several different techniques have been proposed to achieve robustness against parametric variations
and unmodelled dynamics (disturbances) [6,9] by a continuous control law (as opposed to a switching
control action such as Equation (18.5)), which is obviously essential in systems where the control inputs
are continuous functions and hence Equation (18.5) cannot be realized. One such technique [9] is based
on
r
Given the Lyapunov function candidate v = S
T
S/2, if the Lyapunov stability criteria are satisfied,
the solution ϕ(t) − s
a
(x) = 0 is stable for all possible trajectories of systems (18.15) and (18.16).
r
The problem then becomes that of finding the control u that satisfies the Lyapunov condition
dv
dt
=−S
T
DS ≤ 0 for some positive definite matrix D.
Copyright © 2005 by CRC Press LLC

18
-6 Robotics and Automation Handbook
From the sliding surface (18.17) where s
a
(x)isdefined as s
a
(x) =x
2
+ G x
1
and replacing dS/dt =
˙
ϕ −
f
2
− B
2
u − B
2
d − G
f
1
in the Lyapunov condition dv/dt =−S
T
DS ≤ 0, the following control law
is obtained
u = sat
−
d + B
−1
2
d ϕ
dt
−
f
2
− G
f
1
+ B
−1
2
Ds
= sat
u
eq
+ B
−1
2
Ds
(18.20)
which is a continuous control law and chatter is therefore eliminated. Because Equation (18.20) requires
knowledge of the equivalent control law (18.19), this solution is not directly useful. After some algebra,
and considering that B
2
u
eq
= B
2
u + ds/dt, it can be shown that Equation (18.19) and Equation (18.20)
imply
u(t) = sat
u(t − ) + B
−1
2
Ds +
ds
dt
, → 0
(18.21)
i.e., the control u at instant t is calculated from the value at time (t − ). The control law (18.21) is
continuous everywhere, except at the discontinuities of s (x, t).
18.4 Control of Robotic Manipulators by Continuous
Sliding Mode Laws
The technique described in Section 18.3 to achieve robust sliding control of a nonlinear plant using
a continuous control law will be used here to propose solutions to the most common motion control
problems in robotic manipulators, namely, the trajectory tracking, force control, and impedance control
problems.
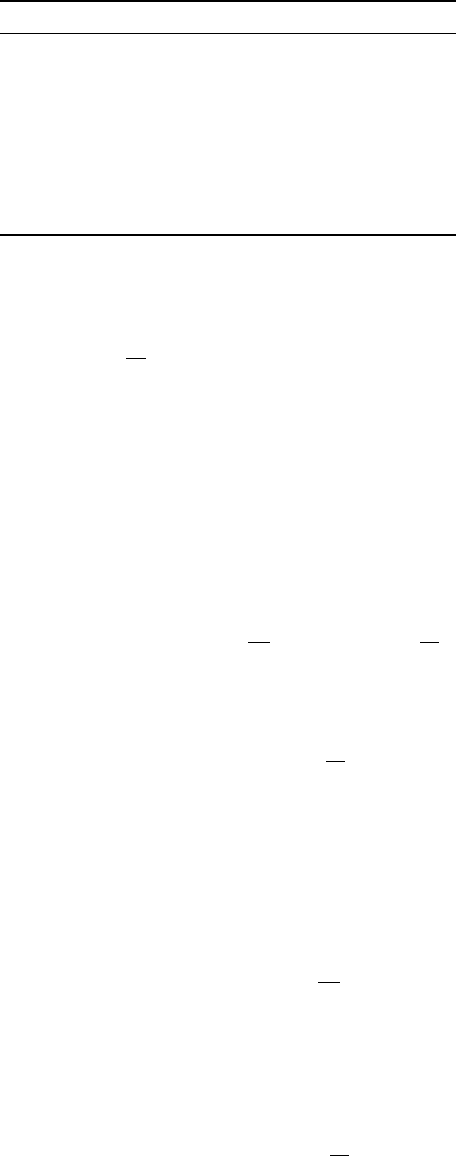
Aroboticmanipulatoractuatedbyelectricalmachinescan be describedbythe nonlinearEquation (18.6),
where the input torque is given by
τ = K
t
(
i
d
)
i
q
(18.22)
where
i
q
is the n ×1 vector of input currents (control input),
i
d
the n ×1 vector of current disturbances,
and K
t
(
i
d
)an × n diagonal positive matrix. The load vector in Equation (18.6) is
g(q, t) =−K
t
(
i
d
)
i
L
(18.23)
where
i
L
is the n ×1 vector of currents associated to the mechanical load acting on the manipulator. The
joint space and work space descriptions can be written as follows:
d
2
z
dt
2
=
f (z, t) + B(
i
d
)
i
q
− B(
i
d
)
i
L
(18.24)
where the state vector z is defined as z
T
= [q
1
, ..., q
n
], B = J
−1
K
T
with inertia matrix J (for the joint
space formulation), and as z
T
= [x
1
, ..., x
n
], B = J
0
J
−1
K
T
, with J
0
the Jacobian defined by the direct
kinematics x =
F (q); J
0
= [
∂
F (q)
∂ q
] (for the work space formulation). The model (18.24) is referred to
as the “reduced order dynamics” if the control input is a vector of motor currents, and as “full order
dynamics” if the control input is motor voltages (i.e., motor currents are considered internal states of the
system) [9].
18.4.1 Sliding Mode Formulation of the Robotic Manipulator
Motion Control Problem
The control goal is to find the vector of input currents that will force the nonlinear function of the states
s
a
(z,
˙
z) to track the reference function ϕ(t) or, in other words, that will force the system states to remain
Copyright © 2005 by CRC Press LLC
Sliding Mode Control of Robotic Manipulators 18
-7
TABLE 18.1 Sliding Mode Manifolds for Robotic Manipulator
Motion Control
Joint Space Work Space
Position tracking s
a
= C
1
q +
˙
qs
a
= C
1
x +
˙
x
ϕ = C
1
q
ref
+
˙
q
ref
ϕ = C
1
r +
˙
r
C
1
> 0 C
1
> 0
Impedance control s
a
= Dq + K
˙
q + M
¨
q s
a
= Dx + K
˙
x + M
¨
x
ϕ =
F
ext
ϕ =
F
ext
M, K , D > 0 M, K, D > 0
Force control s
a
=
F
ext
s
a
=
F
ext
ϕ =
F
ref
ϕ =
F
ref
on the smooth manifold:
S =
z,
dz
dt
: ϕ(t) −s
a
(z,
˙
z) =s(z, t) =
0
(18.25)
Simple examples of sliding mode manifolds for the trajectory tracking, force control, and impedance
control problems are shown in Table 18.1 [9].
18.4.2 Sliding Mode Controller Design
Controllerdesign is based on the dynamic equations of the manipulator (18.24), the sliding mode manifold
(as those presented in Table 18.1), and the sliding mode control algorithm (18.21). The output of the
algorithm is
i
ref
q
, the vector of reference currents to be used by the motor current controller:
i
ref
q
= sat
i
L
+ (GB)
−1
Ds +
d ϕ
dt
− G
f
, G =
∂s
∂z
(18.26)
which in terms of the practical form (18.21) becomes
i
ref
q
= sat
i
q
+ (GB)
−1
Ds +
ds
dt
(18.27)
For the trajectory tracking problem in the joint space, the sliding surface becomes
S =ϕ −s
a
= C
1
(q
ref
−q) + (
˙
q
ref
−
˙
q), C
1
> 0 (18.28)
and the corresponding control current
i
ref
q
= sat
i
q
+ K
−1
T
J
D
S +
d
S
dt
(18.29)
Similarly, for trajectory tracking in the work space,
S =ϕ −s
a
= C
1
(r −x) + (
˙
r −
˙
x), C
1
> 0 (18.30)
i
ref
q
= sat
i
q
+ K
−1
T
JJ
−1
0
D
S +
d
S
dt
(18.31)
Copyright © 2005 by CRC Press LLC

18
-8 Robotics and Automation Handbook
Notice that the proposed algorithms (18.29) and (18.31) are rather simple and do not require estimation
of either acceleration or disturbance for their implementation.
The mechanical impedance of a robotic manipulator is defined as a linear combination of its state
coordinates. A corresponding sliding mode manifold can be defined as
S ={z,
˙
z,
¨
z; F
ext
− (Dx + K
˙
x + M
¨
x) =s(x, t) =
0} (18.32)
The corresponding control current can be obtained by solving s (x, t) =
0:
i
ref
q
= sat[
i
q
+ (MJ
0
J
−1
K
T
)
−1
(Dx + K
˙
x + M
¨
x − F
ext
)] (18.33)
The same concept can be easily extended to the force control problem (whether in full order or reduced
order formulation). A mathematical model of the contact force such as the one described in [13] will be
necessary.
18.5 Conclusions
This chapter has introduced the basic concepts and formulations involved in the use of sliding mode
control techniques for robotic manipulators. Sliding mode controller design has been extensively used in
robotics due to its remarkable robustness to parametric uncertainties and unmodelled dynamics. Several
other aspects of the use of sliding mode for motion control of robotic manipulators have been extensively
discussed in the literature, such as the use of nonlinear observers to estimate unmeasurable states [10],
model reference adaptive control in variable structure systems [12], perturbation estimation [8], and path
following [11].
References
[1] Slotine, J.J., Sliding controllerdesign for nonlinear systems, Int. J. Control, Vol. 40, No. 2, pp.421–434,
1984.
[2] Slotine, J.J. and Coetsee, J.A., Adaptive sliding controller synthesis for nonlinear systems, Int. J.
Control, Vol. 43, No. 6, 1986.
[3] Slotine, J.J. and Li, W., Applied Nonlinear Control, Prentice Hall, Englewood Cliffs, NJ, 1987.
[4] Utkin, V.I., Variable structure systems with sliding modes, IEEE Trans. Autom. Control, Vol. 22, No. 2,
pp. 212–222, 1977.
[5] De Carlo, R.A., Zak, S.H., and Drakunov, S.V., Variable structure, sliding mode controller design,
IEEE Control Engineering Handbook, pp. 941–951, CRC Press, Boca Raton, FL, 1995.
[6] Olgac, N. and Chang, J., Constrained sliding mode control for nonlinear dynamic systems without
chatter, Proc. 32nd IEEE Conference on Decision and Control, San Antonio, TX, pp. 414–415, 1993.
[7] Azenha , A. and Machado, J.A.T., Variable structure position/force hybrid control of manipulators,
Proc. 4th IFAC Workshop on Algorithms and Architectures for Real-Time Control, Vilamoura, Portugal,
pp. 347–352, 1997.
[8] Curk, B. and Jezernik, K., Sliding mode control with perturbation estimation: application on DD
robot mechanism, Robotica, Vol. 19, No. 6, pp. 641–648, 2000.
[9] Sabanovic, A., Jezernik, K., and Wada, K., Chattering-free sliding modes in robotic manipulator
control, Robotica, Vol. 14, pp. 17–29, 1996.
[10] Jezernik, K., Curk, B., and Harnik, J., Observer-based sliding mode control of a robotic manipulator,
Robotica, Vol. 12, pp. 443–448, 1994.
[11] Dagci, O.H., Ogras, U.Y., and Ozguner, U., Path following controller design using sliding mode
control theory, Proc. 2003 American Control Conference, Denver, CO, Vol. 1, pp. 903–908, June 2003.
Copyright © 2005 by CRC Press LLC
Sliding Mode Control of Robotic Manipulators 18
-9
[12] Tso, S.K., Xu, Y., and Shum, H.Y., Variable structure model reference adaptive control of robot
manipulators, Proc. 1991 IEEE International Conference on Robotics and Automation, Sacramento,
CA, Vol. 3, pp. 2148–2153, April 1991.
[13] Arai, F., Fukuda,T., Shoi, W., and Wada, H., Models of mechanical systems for controller
design, Proc. IFAC Workshop on Motion Control for Intelligent Automation, Perugia, Italy, pp. 13–19,
1992.
Copyright © 2005 by CRC Press LLC

19
Impedance and
Interaction Control
Neville Hogan
Massachusetts Institute of Technology
Stephen P. Buerger
Massachusetts Institute of Technology
19.1 Introduction: Controlling Mechanical Interaction
The Effect of Interaction on Performance and Stability
•
Interaction as Disturbance Rejection
•
Interaction as Modeling
Uncertainty
19.2 Regulating Dynamic Behavior
Mechanical Impedance and Admittance
•
Port Behavior and
Transfer Functions
19.3 Analyzing Coupled Systems
Causal Analysis of Interaction Port Connection
•
Impedance
vs. Admittance Regulation
•
Coupled System Stability Analysis
•
Passivity and Coupled Stability
19.4 Implementing Interaction Control
Virtual Trajectory and Nodic Impedance
•
“Simple”
Impedance Control
•
Direct Impedance Modulation
19.5 Improving Low-Impedance Performance
Force Feedback
•
Natural Admittance Control
•
Series
Dynamics
19.6 More Advanced Methods
19.7 Conclusion: Interaction Control, Force Control,
and Motion Control
19.1 Introduction: Controlling Mechanical Interaction
Mechanical interaction with objects is arguably one of the fundamentally important robot behaviors. Many
current robot applications require it; for example, mechanical interaction is essential for manipulation, the
core task of assembly systems. Future robot applications, such as versatile use of tools or close cooperation
with humans, may be enabled by improved control of mechanical interaction.
Interaction with the environment may serve sensory or motor functions (or both), and the most
appropriatemechanical interaction is differentfor sensoryormotortasks.Mechanicalinteraction dynamics
may be characterized by mechanical impedance, which may loosely be considered a dynamic extension
of stiffness.
1
Lower mechanical impedance reduces interaction forces due to encountering an unpredicted
object, thereby protecting both the robot and any object it manipulates (interaction forces on each being
1
Conversely, mechanical admittance may be considered a dynamic generalization of compliance. A more rigorous
definition is provided below.
Copyright © 2005 by CRC Press LLC
19
-2 Robotics and Automation Handbook
opposite but equal). Using a human analogy, by this reasoning, tactile exploration and manipulation
of fragile objects should evoke the use of our lowest-impedance limb segments, and while we can (and
routinely do) interact with objects using other body parts (the elbow, the knee, the foot, etc.), we naturally
tend to use our fingers for gentle, delicate tasks.
Conversely, wielding an object as a tool often requires it to be stabilized and that requires higher
mechanical impedance. This is especially important if the interaction between the manipulator and the
object is destabilizing, as is the case for many common tools. Again using a human analogy, consider,
for example, the simple task of pushing on a surface with a rigid stick. If force is exerted on the stick
normal to the surface, then the stick is statically unstable; small displacements from the configuration in
which stick axis and force vector co-align result in torques that act to drive the stick further from that
configuration.Successat this task requiresa stabilizing mechanical impedance, and because pushing harder
exacerbates the problem (the magnitude of the destabilizing torque is proportional to the applied force),
the minimum required impedance grows with the force applied; see Rancourt and Hogan (2001) for a
detailed analysis. Simple though this task may be, it is an essential element of the function of many tools
(e.g., screwdrivers, power drills) and any manipulator — human or robotic — must provide a stabilizing
mechanical impedance to operate them.
In other applications the robot’s interactive behavior may be the main objective of control. For example,
to use a robot to serve as a force-reflecting haptic display (Miller et al., 2000) or to deliver physiotherapy
(Volpe et al., 2000) requires intimate physical interaction with humans. In these applications the “feel” of
the robot becomes an important performance measure, and “feel” is determined by mechanical interaction
dynamics. Versatile interaction with objects (whether tools or humans or other robots), therefore, requires
an ability to modulate and control the dynamics of interaction.
19.1.1 The Effect of Interaction on Performance and Stability
Wheninteraction occurs, the dynamicproperties of the environmentareimportant.If we attempt to control
motion or force, interaction affects the controlled variable, introducing error upon which the controller
must act. Errors clearly mar performance but even more importantly, though perhapsless obvious, stability
may also be compromised. That is, a system that is stable in isolation can become unstable when coupled
to an environment that is itself stable. Such instabilities, known as coupled or contact instabilities, appear
even in simple systems with basic controllers contacting simple environments. To illustrate this key point
consider the following examples.
Example 19.1
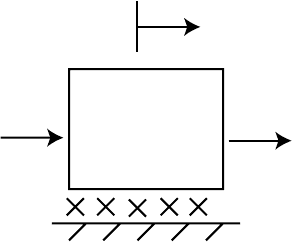
The first example is based on a common design for a robot motion controller. One of the simplest models
of a robot is depicted in Figure 19.1. A single mass m represents the robot’s inertial properties. It is subject
m
F
e
F
a
b
x
FIGURE 19.1 Model with inertial, frictional, actuator, and environmental forces.
Copyright © 2005 by CRC Press LLC
Impedance and Interaction Control 19
-3
to actuator forces F
a
and environmental forces F
e
. A single damper b connected to ground represents
frictional losses. The Laplace-transformed equation of motion for this simple model is as follows:
(ms
2
+ bs)X = F
a
+ F
e
(19.1)
where X is the Laplace transform of the mass position x. A proportional-integral motion controller is
applied
F
a
= K
p
(R − X) +
K
I
s
(R − X)
(19.2)
where R is the Laplace transform of the reference position and K
p
and K
I
are proportional and integral
gains, respectively. In isolation, F
e
= 0 and the closed-loop transfer function is
X
R
=
K
p
s + K
I
ms
3
+ bs
2
+ K
P
s + K
I
(19.3)
From the Routh-Hurwitz stability criterion, a condition for isolated stability is the following upper bound
on the integral gain:
K
I
<
bK
P
m
(19.4)
However, this condition is not sufficient to ensure that the robot will remain stable when it interacts with
objects in its environment. Even the simple act of grasping an object may be destabilizing. If the system
is not isolated, and instead is coupled to a mass m
e
, this is equivalent to increasing the mass from m to
(m +m
e
). Hence a condition for stability of the coupled system is
K
I
<
bK
P
(m +m
e
)
(19.5)
Any controller that satisfies Equation (19.4) results in a stable isolated system. Prudent controller design
would use a lower integral gain than the marginal value, providing robustness to uncertainty about system
parameters and perhaps improved performance. However, for any fixed controller gains, coupling the
robot to a sufficiently large m
e
will violate the condition for stability. Interaction with a large enough mass
can always destabilize a system that includes integral-action motion control, even if that system is stable
in isolation.
This difficulty may be obscured by the facts that, at present, most robots have inertia far exceeding that
of the payloads they may carry, the total mass m + m
e
is not much greater than the mass m of the robot
alone, and the bounds of Equation (19.4) and Equation (19.5) are similar. However, in some applications,
e.g., in space or under water, a robot need support little or none of a payload’s weight, and objects of
extremely large mass may be manipulated. In these situations the vulnerability of integral-action motion
control to coupled instability may become an important consideration.
Example 19.2
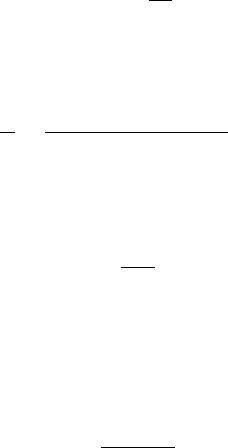
The second example illustrates one of the common difficulties of force control. A robot with a single
structural vibration mode is represented by the model shown in Figure 19.2. Two masses m
1
and m
2
are
connected by a spring of stiffness k. Frictional losses are represented by dampers b
1
and b
2
connected from
the masses to ground and damper b
3
in parallel with the spring. One mass is driven by the actuator force
F
a
and the other is subject to F
e
, an interaction force with the environment.
A proportional-derivative (PD) controller acting on the error between the position of the mass at the
actuator x
1
and a reference r is applied to control motion. A proportional controller acting on force fed
back from the environment is applied to control force and improve interactive behavior. The control law
Copyright © 2005 by CRC Press LLC

19
-4 Robotics and Automation Handbook
x
2
x
1
b
3
b
2
b
1
k
F
e
F
a
m
1
m
2
FIGURE 19.2 Model including a single structural resonance.
is as follows:
F
a
= K (r − x
1
) + B(
˙
r −
˙
x
1
) + K
f
(F
e
+ K (r − x
1
) + B(
˙
r −
˙
x
1
))
(19.6)
where K and B are related to the proportional and derivative motion feedback gains, respectively, and K
f
is the proportional force feedback gain.
2
When the system is isolated from any environment, F
e
= 0 and
Equation (19.6) reduces to PD motion control. Using the Routh-Hurwitz criterion, the isolated system’s
closed-loop characteristic polynomial can be shown to haveall its poles in the open left half plane, providing
at worst marginal stability for arbitrary nonnegative real parameters and controller gains.
If the system is not isolated but instead is connected to a spring to ground, such that F
e
=−k
e
x
2
, the
closed loop characteristic polynomial is changed. It is now easy to find parameters such that this polynomial
has right-half-plane roots. For example, if m
1
= m
2
= 10, b
1
= b
2
= b
3
= 1, k = 100, K = 10, B = 1,
K
f
= 10, and k
e
= 100, the closed loop poles are at −2.78 ± 5.51i and 2.03 ± 5.53i, where the latter
pair are unstable. Once again, a system that is stable when isolated (corresponding to k
e
= 0) is driven to
instability when coupled to an object in its environment, in this case, a sufficiently stiff spring (k
e
= 100).
Structural vibrations are a common feature of robot dynamics and present a substantial challenge to
controller design. Though simple, the PD motion controller in this example has the merit that it is not
destabilized by structural vibration because the actuator and assumed motion sensor are co-located.
3
However, the addition of a force feedback loop renders the robot control system vulnerable to coupled
instability. In part this is because the actuator and force sensor are not co-located. Given the difficulty of
designing a robot with no significant dynamics interposed between its actuators and the points at which
it contacts its environment (see Tilley and Cannon, 1986, Sharon et al., 1988), the simple model in this
example represents a common situation in robot interaction control, and we will return to this model
several times in this chapter.
These two examples show that to ensure stability when interacting even with simple environments, it
is not sufficient to design for stability of the manipulator in isolation. The environment’s dynamics must
also be considered — dynamics that are generally not known exactly. Furthermore, in many applications a
robot must be capable of stable interaction with a variety of environments. For example, an assembly robot
might pick up a component, move it across free space, bring it into contact with a kinematic constraint
used to guide placement of the component, move it along the constraint, release the component, and
return to get another. In this case, at different times in the process, the robot must remain stable when
moving unloaded in free space, moving to transport the component, and moving to comply with the
kinematic constraint. Each of these three contexts poses a different stability challenge which illustrates one
2
This controller is discussed further below in the section on force feedback.
3
An alternative interpretation is presented below in the section on simple impedance control.
Copyright © 2005 by CRC Press LLC

Impedance and Interaction Control 19
-5
key reason why, even if the environment can be closely modeled, there are strong benefits to designing a
controller that is insensitive to ignorance of its properties. If, for example, a different controller is required
for each of the three contexts, the system must decide which controller to use at each instant and manage
the transition between them. Usually the easiest way to identify the environment is to interact with it; thus,
interaction might be required before the appropriate controller is in place. Stable interaction is needed to
identify the environment, but stability cannot be guaranteed without a well-characterized environment.
A single controller that can perform satisfactorily within all expected contexts without compromising
stability would have significant advantages.
19.1.2 Interaction as Disturbance Rejection
Control theory offers several tools to endow controllers with the ability to deal with unknown or poorly
characterized interference (Levine, 1996). Using a disturbance rejection approach, the environment’s
dynamics could be included as disturbance forces. The success of this approach depends on bounding the
disturbance forces, but for many interactive applications the environmental forces may equal or exceed
the robot’s nominal capacity; for example, a kinematic constraint can introduce arbitrarily large forces
dependingon therobot’s own behavior. Furthermore,environmentalforcesgenerally depend on the robot’s
state, and traditionally disturbances are assumed to be state-independent. Thus, treating interaction as a
disturbance rejection problem does not seem promising.
19.1.3 Interaction as Modeling Uncertainty
Modelingthe environmentas an uncertain part of the robot and using robust control tools (Levine, 1996) to
guarantee stability is another reasonable approach. Interacting with an environment effectively changes the
robot plant by adding some combination of elastic, dissipative, and inertial properties, perhaps including
kinematic constraints. If the effect of interaction is only to alter the parameters of the robot model (e.g., by
adding to the endpoint mass) a robust control approach may succeed, though robustifying the system to a
large range of environment parameters might require an unacceptable sacrifice of performance. However,
interaction may change the structure of the model. For example, it may reduce the order of the system (e.g.,
moving from free motion to contact with a kinematic constraint reduces the degrees of freedom of the parts
contacting the constraint) or increase it (e.g., contact with an elastic object adds a new mode of behavior
due to interaction between the robot inertia and the object elasticity). If interaction changes the model
structure, the applicability of a robust control approach is unclear. Forexample, the environmentforcesand
motions may be of the same magnitude and in the same frequency range as the known robot dynamics.
4
As robust control methods commonly assume that uncertain dynamics lie outside the frequency range of
interest, treating interaction as a robustness problem does not seem promising.
As mentioned above, in some applications the robot’s dynamic behavior (colloquially termed its “feel”)
may be a key performance measure and hence a legitimate objective of control system design. Rather than
attempt to overwhelm the consequences of interaction by building in robustness, the approach described
herein aims to regulate the interaction itself by controlling the robot’s dynamic behavior at the places
where it interacts with its environment.
19.2 Regulating Dynamic Behavior
Thegeneral approachheretermed “interaction control”refers toregulationof the robot’s dynamicbehavior
at its ports of interaction with the environment. An interaction port is a place at which energy may be
exchanged with the environment. It is therefore defined by a set of motion and force variables such that
4
To use a human example, consider two people shaking hands: each has a similar response speed or bandwidth
and produces comparable force and motion; each individual control system is coupled to a system with approximately
double the large number of degrees of freedom that it controls when isolated.
Copyright © 2005 by CRC Press LLC