Kurfess T.R. Robotics and Automation Handbook
Подождите немного. Документ загружается.


Force/Impedance Control for Robotic Manipulators 16
-17
where M, q, G, and τ are defined in Example 1 and
A
T
=
1
−1
(16.88)
For this problem, we assume that x = q
1
, and as per Equation (16.76), we must find a function g (x) that
satisfies q = g (x). For holonomic constraints, we can verify that following kinematic relationships hold:
q
1
q
2
=
x
x − 3
(16.89)
From the definition of the Jacobian in Equation (16.78), we obtain
=
1
1
(16.90)
and the reduced order position/force controller is defined as follows:
τ = M(
¨
x
d
+ K
v
˙
˜
x + K
p
˜
x) +G + A
T
(λ
d
+ K
f
˜
λ)
(16.91)
where x
d
represents the desired trajectory of q
1
and λ
d
represents the desired force multiplier.
For this problem, we can scrutinize the relationship between λ and the normal force exerted on the
surface by equating the expressions for the forces in this example and that in Example 1 as follows:
A
T
λ = J
T
f (16.92)
where J and f are defined in Example 1. Given that the surface friction has been neglected, from the above
equation, it follows that:
λ =
f
1
√
2
(16.93)
where f
1
is the normal force exerted on the surface. Similarly, from kinematic relationships, we observe
that
q
1
=
√
2
2
v +
3
2
(16.94)
where v denotes the end-effector position measured along the surface. The significance of the expressions
in Equation (16.93) and Equation (16.94) lies in the fact that they would be used for trajectory generation
because the position and force control objectives are formulated in terms of f
1
and v.Specifically, λ
d
is obtained from the desired normal force f
d1
in Equation (16.93) and q
d1
is obtained from the desired
end-effector surface position v
d
in Equation (16.94).
Copyright © 2005 by CRC Press LLC

16
-18 Robotics and Automation Handbook
16.7 Background and Further Reading
Over the last three decades, many researchers have developed a variety of force control algorithms for
robot manipulators. Raibert and Craig in [6] originally proposed the hybrid position/force control ap-
proach. Khatib and Burdik [10] incorporated dynamic coupling effects between the robot joints. In [9],
McClamroch and Wang developed a reduced-order model by applying nonlinear transformation to the
constrained robot dynamics, which facilitated the separate design of position and force control strategies.
For a comprehensive review and comparison of [9] with other position/force control strategies, the reader
is referred to Grabbe et al. [11].
More advanced adaptive control strategies (not discussed in this chapter) have also been developed
for position and force control, such as in [12], where Carelli and Kelly designed adaptive controllers that
ensured asymptotic position tracking but only bounded force tracking error (the reader is referred to [13]
and [14] for similar work). Adaptive full-state feedback controllers designed in Arimoto et al. [15], Yao and
Tomizuka [16], and Zhen and Goldenberg [17] achieved a stronger stability result of asymptotic position
and force tracking. Later de Queiroz et al. [18] designed partial-state feedback adaptive position/force
controllers that compensated for parametric uncertainty in the manipulator dynamics while eliminating
the need for link velocity measurements. In [19], Lanzon and Richards designed robust trajectory/force
controllers for non-redundant rigid manipulators using sliding-mode and adaptive control techniques.
Furthermore, position/force control strategies are also supporting other critical technology initiatives.
For example, in the field of medical robotics, the UC Berkeley/UCSF Telesurgical Workstation controller
[20] is designed to incorporate the motion and force requirements of complex tasks such as tying a knot
and suturing (e.g., a sufficiently large force is required to manipulate the suture through tissue). Another
interesting application is the use of position/force control strategies in visual servo applications of robot
manipulators [21].
In summary, we have presented several position/force control strategies for rigid robot manipulators.
It is important to note that while this chapter presents the development of position/force controllers in
chronological order, many other sophisticated control strategies have been developed and implemented
(some of which have been cited in this section). With the advances in computer processing technology and
real-time control, researchers in the robotics and control engineering fields will be able to design strategies
that capture and process more information about the environment and compensate for uncertainties in
the manipulator model. This would certainly result in significant performance enhancements and as a
result, the use of manipulators in force control applications will be more common.
References
[1] Lipkin, H. and Duff, J., Hybrid twist and wrench control for a robot manipulator, Trans. ASME J.
Mech. Transmissions Automation Design, 110, 138–144, June 1988.
[2] Spong, M. and Vidyasagar, M., Robot Dynamics and Control, John Wiely & Sons, New York,
1989.
[3] Salisbury, J. and Craig, J., Active stiffness control of a manipulator in Cartesian coordinates, Pro-
ceedings of the IEEE Conference on Decision and Control, Dec. 1980.
[4] Lewis, F.L., Abdallah, C.T., and Dawson, D.M., Control of Robot Manipulators, Macmillan, New York,
1993.
[5] Chae, A., Atkeson, C., and Hollerbach, J., Model-Based Control of a Robot Manipulator, MIT Press,
Cambridge, MA, 1988.
[6] Raibert, M. and Craig, J., Hybrid position/force control of manipulators, ASME J. Dynamic Syst.,
Meas., Control, 102, 126–132, June 1981.
[7] Hogan, N., Stable execution of contact tasks using impedance control, Proceedings of the IEEE
Conference on Robotics and Automation, Raleigh, NC, 595–601, March 1987.
[8] Anderson, R. and Spong, M., Hybrid impedance control of robotic manipulators, J. Robotics Au-
tomation, 4, 5, 549–556, Oct. 1988.
Copyright © 2005 by CRC Press LLC
Force/Impedance Control for Robotic Manipulators 16
-19
[9] McClamroch, N. and Wang, D., Feedback stabilization and tracking of constrained robots, IEEE
Transactions on Automatic Control, 33, 5, 419–426, May 1988.
[10] Khatib, O. and Burdick, J., Motion and force control for robot manipulators, Proceedings of the IEEE
Conference on Robotics and Automation, 1381–1386, 1986.
[11] Grabbe, M.T., Carroll, J.J., Dawson, D.M., and Qu, Z., Review and unification of reduced order force
control methods, J. Robotic Syst., 10, 4, 481–504, June 1993.
[12] Carelli, R. and Kelly, R., Adaptive control of constrained robots modeled by singular system, Pro-
ceedings of the IEEE Conference on Decision and Control, 2635–2640, Dec. 1989.
[13] Jean, J.H. and Fu, L.-C., Efficient adaptive hybrid control strategies for robots in constrained ma-
nipulators, Proceedings of the IEEE Conference on Robotics and Automation, 1681–1686, 1991.
[14] Su, C.Y., Leung, T.P., and Zhou, Q.J., Adaptive control of robot manipulators under constrained
motion, Proceedings of the IEEE Conference on Decision and Control, 2650–2655, Dec. 1990.
[15] Arimoto, S., Naniwa, T., and Liu, Y.-H., Model-based adaptive hybrid control of manipulators with
geometric endpoint constraint, Advanced Robotics, 9, 1, 67–80, 1995.
[16] Yao, B. and Tomizuka, M., Adaptive control of robot manipulators in constrained motion, Proceed-
ings of the IEEE Conference on Decision and Control, 2650–2655, Dec. 1990.
[17] Zhen, R.R.Y. and Goldenberg, A.A., An adaptive approach to constrained robot motion control,
Proceedings of the IEEE Conference on Robotics and Automation, 2, 1833–1838, 1995.
[18] de Queiroz, M.S., Hu, J., Dawson, D., Burg, T., and Donepudi, S., Adaptive position/force control of
robotmanipulators withoutvelocitymeasurements:Theoryandexperimentation, IEEE Transactions
on Systems, Man, and Cybernetics, 27-B, 5, 796–809, Oct. 1997.
[19] Lanzon, A. and Richards, R.J., Trajectory/force control for robotic manipulators using sliding-mode
and adaptive control, Proceedings of the American Control Conference, San Diego, 1940–1944, June
1999.
[20] Cavusoglu, M., Williams, W., Tendick, F., and Shankar, S. Sastry, Robotics for telesurgery: second
generation Berkeley/UCSF laparoscopic telesurgical workstation and looking towards the future
applications, Industrial Robot, Special Issue on Medical Robotics, 30, 1, Jan. 2003.
[21] Xiao, D., Ghosh, B.K., Xi, N., and Tarn, T.J., Sensor-based hybrid position/force control of a robot
manipulator in an uncalibrated environment, IEEE Control Systems Technology, 8, 4, 635–645, July
2000.
Copyright © 2005 by CRC Press LLC
17
Robust and Adaptive
Motion Control of
Manipulators
∗
Mark W. Spong
University of Illinois at
Urbana-Champaign
17.1 Introduction
17.2 Background
Kinematics
•
Dynamics
•
Properties of Rigid Robot
Dynamics
17.3 Taxonomy of Control Design Methods
Control Architecture
•
Feedback Linearization Control
•
Joint Space Inverse Dynamics
•
Task Space Inverse
Dynamics
•
Robust Feedback Linearization
•
Adaptive
Feedback Linearization
•
Passivity-Based Approaches
•
Passivity-Based Robust Control
•
Passivity-Based
Adaptive Control
•
Hybrid Control
17.4 Conclusions
17.1 Introduction
This chapter concerns the robust and adaptive motion control of robotic manipulators. The goals of
both robust and adaptive control are to maintain performance in terms of stability, tracking error, or
other specifications, despite parametric uncertainty, external disturbances, unmodeled dynamics, or other
uncertainties present in the system. In distinguishing between robust control and adaptive control, we
followthe commonly accepted notion that a robust controller is usually a fixed controller, static or dynamic,
designed to satisfy performance specifications over a given range of uncertainties, whereas an adaptive
controller incorporates some sort of online parameter estimation. This distinction is important. For
example, in a repetitive motion task the tracking errors produced by a fixed robust controller would tend
to be repetitive as well, whereas tracking errors produced by an adaptive controller might be expected to
decrease over time as the plant and/or control parameters are updated based on runtime information. At
the same time, adaptive controllersthat perform well in the face of parametric uncertainty maynot perform
well in the face of other types of uncertainty such as external disturbances or unmodeled dynamics. An
understanding of the trade-offs involved is therefore important in deciding whether to employ robust or
adaptive control design methods in a given situation.
∗
Partial support from the National Science Foundation under grant ECS-0122412 is gratefully acknowledged.
Copyright © 2005 by CRC Press LLC
17
-2 Robotics and Automation Handbook
Many of the fundamental theoreticalproblems in motion controlof robotmanipulators were solveddur-
ing an intense period of research from about the mid-1980s until the early 1990s during which researchers
first began to exploit fundamental structural properties of manipulator dynamics, such as feedback lin-
earizability, passivity, multiple time-scale behavior, and other properties that we discuss below.
Within the scope of the present article, it is impossible to survey the entire range of results in manipulator
control. We will focus on analytical design methods, including Lyapunov based design, variable structure
control, operator theoretic methods, and passivity-based control for rigid robots. We will briefly touch
upon more recent hybrid control methods based on multiple-models but will not discuss control design
based on so-called soft computing methods, such as neural networks, fuzzy logic, genetic algorithms, or
statistical learning methods. We will also not discuss issues involved in force feedback control, friction
compensation, or control of elastic manipulators. The references at the end of this article may be consulted
for additional information on these and other topics.
17.2 Background
Robotmanipulators are basically multi-degree-of-freedom positioning devices. Robot dynamics are multi-
input/multi-output, highly coupled, and nonlinear. The main challenges in the motion control problem
are the complexity of the dynamics resulting from nonlinearity and multiple degrees-of-freedom, and
uncertainty, both parametric and dynamic. Parametric uncertainty arises from imprecise knowledge of
inertia parameters, while dynamic uncertainty arises from joint and link flexibility, actuator dynamics,
friction, sensor noise, and unknown environment dynamics.
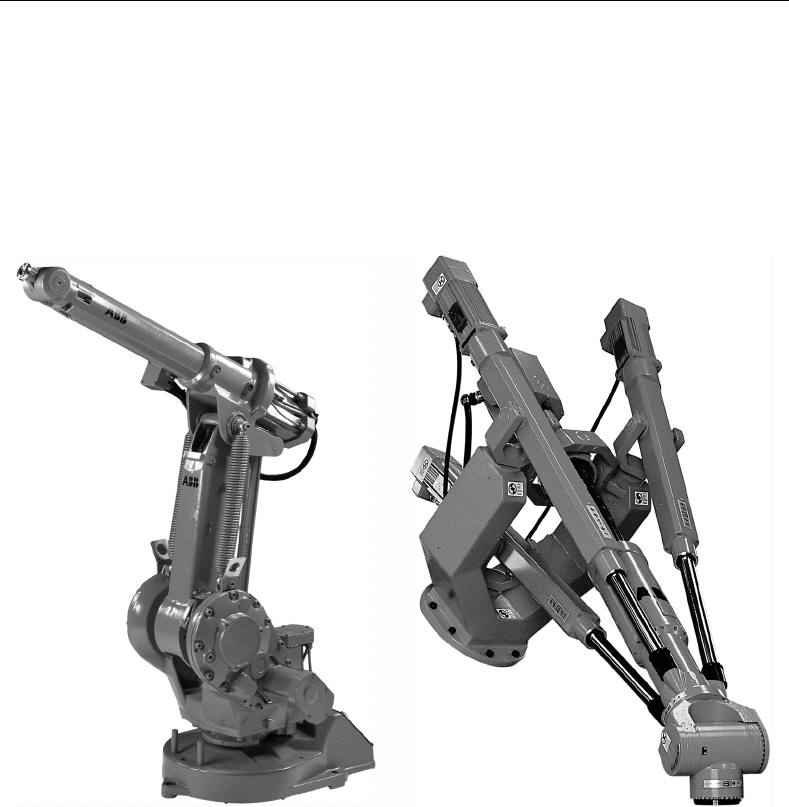
We consider a robot manipulator with n-links interconnected by joints into a kinematic chain. Fig-
ure 17.1 shows a serial link (left) and a parallel link (right) manipulator. A parallel robot, by definition,
FIGURE 17.1 A serial manipulator (left), the ABB IRB1400, and a parallel manipulator (right), the ABB
IRB940Tricept. (Photos courtesy of ABB Robotics.)
Copyright © 2005 by CRC Press LLC
Robust and Adaptive Motion Control of Manipulators 17
-3
q
1
q
2
q
3
q
4
q
5
q
6
R
x
BASE FRAME
TASK FRAME
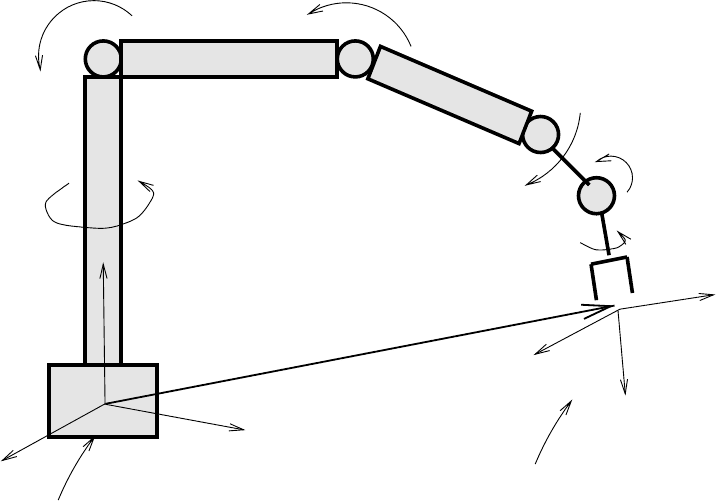
FIGURE 17.2 A serial link manipulator showing the attached base frame, task frame, and configuration variables.
contains two or more independent serial link chains. For simplicity of exposition we shall confine our
discussion to serial link manipulators with only rotational or revolute joints as shown in Figure 17.2. Most
of the discussion in this article remains valid for parallel robots and for robots with sliding or prismatic
joints.
We d efine the joint variables, q
1
, ..., q
n
, as the relative angles between the links, for example, q
i
is
the angle between link i and link i − 1.Avectorq =(q
1
, ..., q
n
)
T
with each q
i
∈(0, 2π), is called a
configuration. The set of all possible configurations is called configuration space or joint space, which we
denoteasC. Theconfiguration space for arevolutejoint robotisan n-dimensional torus,T
n
= S
1
×···×S
1
,
where S
1
is the unit circle.
The task space is the space of all positions and orientations (called poses) of the end-effector. We attach
a coordinate frame, called the base frame,orworld frame, at the base of the robot and a second frame,
called the end-effector frame or task frame, at the end-effector. The end-effector position can then be
described by a vector x ∈
3
specifying the coordinatesof the origin of the task framein the base frame. The
end-effector orientation can be described by a 3 ×3 matrix R ∈ SO(3). The task space is then isomorphic
to the special Euclidean group, SE(3) =
3
× SO(3), elements of which are called rigid motions [41].
17.2.1 Kinematics
The forward kinematics map is a function
X
0
=
x(q)
R(q)
= f
0
(q):T
n
→ SE(3) (17.1)
from configuration space to task space which gives the end-effector pose in terms of the joint configuration.
The inverse kinematics map gives the joint configuration as a function of the end-effector pose. The
Copyright © 2005 by CRC Press LLC

17
-4 Robotics and Automation Handbook
forward kinematics map is many-to-one,so that several joint space configurations may give rise to the same
end-effector pose. This means that the forward kinematics always has a unique pose for each configuration,
while the inverse kinematics has multiple solutions, in general.
The kinematics problem is compounded by the difficulty of parametrizing the rotation group, SO(3).
It is well known that there does not exist a minimal set of coordinates to “cover” SO(3), i.e., a single set of
three variables to represent all orientations in SO(3) uniquely. The most common representations used are
Eulerangles and quaternions. Representational singularities, which are points at which the representation
fails to be unique, give rise to a number of computational difficulties in motion planning and control.
Given a minimal representation for SO(3), for example, a set of Euler angles φ, θ, ψ, the forward
kinematics map may also be defined by a function
X
1
=
x(q)
o(q)
= f
1
(·):T
n
→
6
(17.2)
wherex(q) ∈
3
givesthe Cartesianposition oftheend-effectorando(q) = (φ(q), θ(q), ψ(q))
T
represents
the orientation of the end-effector. The nonuniqueness of the inverse kinematics in this case will include
multiplicities due to the particular representation of SO(3) in addition to multiplicities intrinsic to the
geometric structure of the manipulator.
Velocitykinematics refers to the relationship between the joint velocities and the end-effector velocities.
If the mapping f
0
from Equation (17.1) is used to represent the forward kinematics, then the velocities
are given by
V =
v
ω
= J
0
(q)
˙
q (17.3)
where J
0
(q)isa6×n matrix, called the manipulator Jacobian. The vectors v and ω represent the linear
and angular velocity, respectively, of the end-effector. The linear velocity v ∈
3
is just
d
dt
x(q), where
x(q) is the end-effector position vector from Equation (17.1). It is a little more difficult to see how the
angular velocity vector ω is computed since the end-effector orientation in Equation (17.1) is specified
by a matrix R ∈ SO(3). If ω = (ω
x
, ω
y
, ω
z
)
T
isavectorin
3
,wemaydefine a skew-symmetric matrix,
S(ω), according to
S(ω) =
0 −ω
z
ω
y
ω
z
0 −ω
x
−ω
y
ω
x
0
(17.4)
The set of all skew-symmetric matrices is denoted by so(3). Now, if R(t)belongstoSO(3) for all t, it can
be shown that
˙
R = S(ω(t))R
(17.5)
for a unique vector ω(t) [41]. The vector ω(t)thusdefined is the angular velocity of the end-effector frame
relative to the base frame.
If the mapping f
1
is used to represent the forward kinematics, then the velocity kinematics is written as
˙
X
1
= J
1
(q)
˙
q (17.6)
where J
1
(q) = ∂ f
1
/∂q is the 6 ×n Jacobian of the function f
1
. In the sequel we will use J to denote either
the matrix J
0
or J
1
.
Copyright © 2005 by CRC Press LLC
Robust and Adaptive Motion Control of Manipulators 17
-5
17.2.2 Dynamics
The dynamics of n-link manipulators are conveniently described via the Lagrangian approach. In this
approach,the joint variables, q =(q
1
, ..., q
n
)
T
,serveasgeneralizedcoordinates.Themanipulatorkinetic
energy is given by a symmetric, positive definite quadratic form,
K =
1
2
n
i, j =1
d
ij
(q)
˙
q
i
˙
q
j
=
1
2
˙
q
T
D(q)
˙
q (17.7)
where D(q) is the inertia matrix.Themanipulator potential energy is given by a continuously differ-
entiable function P : C →. For a rigid robot, the potential energy is due to gravity alone while for a
flexible robot the potential energy will also contain elastic potential energy.
The dynamics of the manipulator are then described by Lagrange’s equations [41]
d
dt
∂L
∂
˙
q
k
−
∂L
∂q
k
= τ
k
, k = 1, ..., n
(17.8)
where L = K−P is the Lagrangian and τ
1
, ..., τ
n
represent input generalized forces. In local coordinates
Lagrange’s equations can be written as
n
j=1
d
kj
(q)
¨
q
j
+
n
i, j =1
ijk
(q)
˙
q
i
˙
q
j
+ φ
k
(q) = τ
k
, k = 1, ..., n (17.9)
where
ijk
=
1
2
∂d
kj
∂q
i
+
∂d
ki
∂q
j
−
∂d
ij
∂q
k
(17.10)
are known as Christoffel symbols of the first kind, and
φ
k
=
∂P
∂q
k
(17.11)
In matrix form we can write Lagrange’s Equation (17.9) as
D(q)
¨
q + C(q,
˙
q)
˙
q + g (q) = τ
(17.12)
In addition to the link inertias represented by the inertia matrix, D(q), the inertias of the actuators are
important to include in the dynamic description, especially for manipulators with large gear reduction.
The actuator inertias are specified by an n × n diagonal matrix
I = diag
I
1
r
2
1
, ..., I
n
r
2
n
(17.13)
where I
i
and r
i
are the actuator inertia and gear ratio, respectively, of the ith joint. Defining M(q) =
D(q) + I , we may modify the dynamics to include these additional terms as
M(q)
¨
q + C(q,
˙
q)
˙
q + g (q) = τ
(17.14)
17.2.3 Properties of Rigid Robot Dynamics
The equations of motion (17.14) possess a number of important properties that facilitate analysis and
control system design. Among these are
Copyright © 2005 by CRC Press LLC

17
-6 Robotics and Automation Handbook
1. The inertia matrix M(q) is symmetric and positive definite, and there exist scalar functions, µ
1
(q)
and µ
2
(q), such that
µ
1
(q)||ξ || ≤ ξ
T
M(q)ξ ≤ µ
2
(q)||ξ || (17.15)
for all ξ ∈
n
where ||·||denotes the usual Euclidean norm in
n
. Moreover, if all joints are revolute
then µ
1
and µ
2
are constants.
2. For suitable definition of C(q,
˙
q), the matrix W(q,
˙
q) =
˙
M(q) − 2C(q,
˙
q) is skew symmetric.
(See [41] for the appropriate definition of C(q,
˙
q) and the proof of the skew symmetry property.)
Related to the skew symmetry property is the so-called passivity property.
3. The mapping τ →
˙
q is passive, i.e., there exists β ≥ 0 such that
T
0
˙
q
T
(ζ )τ (ζ )dζ ≥−β, ∀ T > 0
(17.16)
To show the passivity property, let H be the total energy of the system
H =
1
2
˙
q
T
M(q)
˙
q + P(q)
(17.17)
Then it is easily shown using the skew-symmetry property that the change in energy,
˙
H, satisfies
˙
H =
˙
q
T
τ (17.18)
Integrating both sides of Equation (17.18) with respect to time gives
T
0
˙
q
T
(u)τ(u)du = H(T) − H(0) ≥−H(0) (17.19)
since the total energy H(T) is nonnegative. Passivity then follows with β = H(0).
4. Rigid robot manipulators are fully actuated, i.e., there is an independent control input for each
degree-of-freedom.Bycontrast, robotspossessing joint or link flexibility areno longer fully actuated
and the control problems are more difficult, in general.
5. The equations of motion (17.12) are linear in the inertia parameters. In other words, there is a
constant vector θ ∈
p
and a function Y(q,
˙
q,
¨
q) ∈
n×p
such that
M(q)
¨
q + C(q,
˙
q)
˙
q + g (q) = Y (q,
˙
q,
¨
q)θ = τ
(17.20)
The function Y (q,
˙
q,
¨
q) is called the regressor. The parameter vector θ is composed of link masses,
moments of inertia, and the like, in various combinations. Historically, the appearance of the passivity
and linear parametrization properties in the early 1980s marked watershed events in robotics research.
Using these properties researchers have been able to prove elegant global convergence and stability results
for robust and adaptive control. We will detail some of these results below.
17.3 Taxonomy of Control Design Methods
The remainder of the article surveys several of the most important control design methods for rigid robots
beginning with the notion of computed torque or feedback linearization and ending with hybrid control.
Forreasons of space, we give only the simplest versions of these ideas applied to rigid robots. We will assume
that the full state q(t),
˙
q(t) of the robot is available whenever needed. Several of the results presented here,
particularly the passivity based control results, havebeen extended to the case of output feedback, i.e., to the
case that only the position q(t) is directly measured. In this case, either an observer or some sort of velocity
Copyright © 2005 by CRC Press LLC
Robust and Adaptive Motion Control of Manipulators 17
-7
JOINT LEVEL
SENSORS
TASK LEVEL
SENSORS
TRAJECTORY
PLANNER
CONTROLLER
ROBOT
ENVIRONMENT
MOTION
PLANNER
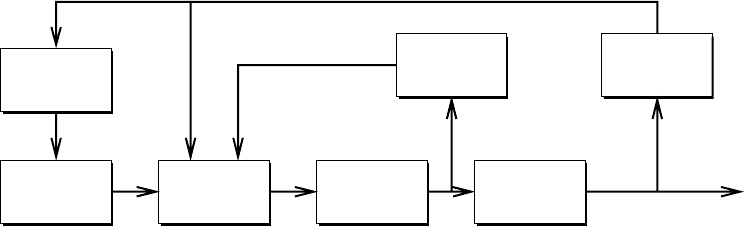
FIGURE 17.3 Block diagram of the robot control problem.
filter must be incorporated into the control design. We will not discuss the inclusion of actuator dynamics
or joint or link flexibility into the control design. We will also not discuss the basic PD and PID control
methods, which can be considered as limiting cases of robust control when no nominal model is used. PD
and PID control is useful for the regulation problem, i.e., for point-to-point motion, especially when used
in conjunction with gravity compensation but is less suitable for tracking time varying trajectories. The
reader is referred to the references at the end of this article for further reading in these subjects.
17.3.1 Control Architecture
The motion control problem for robots is generally heirarchically decomposed into three stages, Motion
Planning, Trajectory Generation, and Trajectory Tracking as shown in Figure 17.3. In the motion plan-
ning stage, desired paths are generated in the task space, SE(3), without timing information, i.e., without
specifying velocity or acceleration along the paths. Of primary concern is the generation of collision free
paths in the workspace. The motion planner may generate a plan offline using background knowledge of
the robot and environment, or it may incorporate task level sensing (e.g., vision or force) and modify the
motion plan in real-time.
In the trajectory generation stage, the desired position, velocity, and acceleration of the manipulator
along the path as a function of time or as a function of arclength along the path are computed. The
trajectory planner may parametrize the end-effector path directly in task space, either as a curve in SE(3)
or as a curve in
6
using a particular minimal representation for SO(3), or it may compute a trajectory
for the individual joints of the manipulator as a curve in the configuration space C.
In order to compute a joint space trajectory, the given end-effector path must be transformed into a
joint space path via the inverse kinematics mapping. A standard approach is to compute a discrete set of
joint vectors along the end-effector path and to perform an interpolation in joint space among these points
in order to complete the joint space trajectory. Common approaches to trajectory interpolation include
polynomial spline interpolation, using trapezoidal velocity trajectories or cubic polynomial trajectories,
as well as trajectories generated by reference models. The trajectory generator should take into account
realistic velocity and acceleration constraints of the manipulator.
The computed reference trajectory is then presented to the controller, which is designed to cause the
robot to track the given trajectory as closely as possible. The joint level controller will, in general, utilize
both joint level sensors (e.g., position encoders, tachometers, torque sensors) and task level sensors (e.g.,
vision, force). This article is mainly concerned with the design of the tracking controller assuming that the
path and trajectory have been precomputed.
17.3.2 Feedback Linearization Control
The goal of feedback linearization is to transform a given nonlinear system into a linear system by use
of a nonlinear coordinate transformation and nonlinear feedback. The roots of feedback linearization in
Copyright © 2005 by CRC Press LLC