Kurfess T.R. Robotics and Automation Handbook
Подождите немного. Документ загружается.


15
-20 Robotics and Automation Handbook
−2
0
2
×10
−3
e
1
(rad)
−2
0
2
0246
−5
0
5
Time (s)
e
2
(rad)
e
3
(rad)
×10
−3
×10
−3
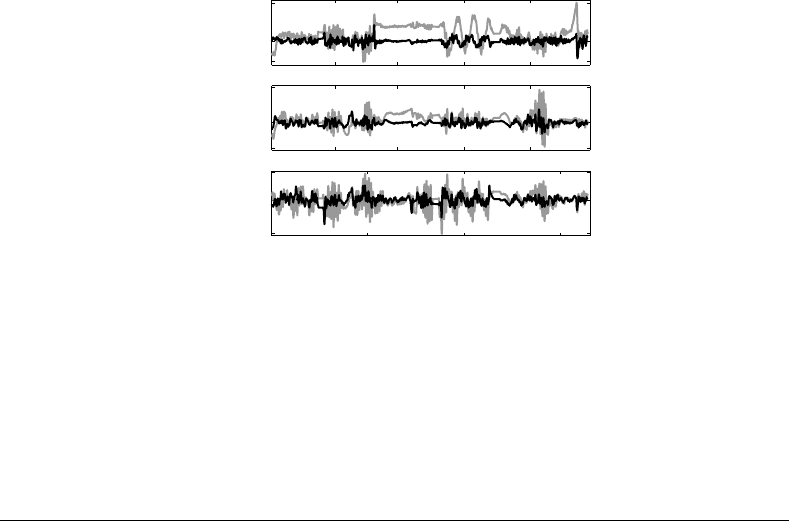
FIGURE 15.21 Position errors in the first experiment achieved with the PD defined by Equation (15.36) (grey) and
with the µ-synthesis controller (black).
authority of the drives. The position errors achieved with the PDs (15.36) are presentedin Figure 15.21 with
the grey lines. Because of the loweropen-loop gains within the bandwidth, the errors achieved with the PDs
(15.32) were even higher, so there is no need to plot them here. The errors achieved using the µ-synthesis
controllers are shown in Figure 15.21 with the black lines. The given plots confirm that the µ-synthesis
controllers realize the reference motion more accurately. They better reduce the tracking errors because
of the higher gains at low frequencies. Integral action of the µ-synthesis controllers especially contributes
to the higher gains. The error ranges, given in Table 15.2, verify the superior tracking performance with
the µ-synthesis controllers. In joints 1 and 2, these controllers achieve the errors within the range [−10
−3
,
10
−3
] radians. The range of the error in joint 3 is twice that of the first two joints. Such accuracy can be
considered as very good for a direct-drive robot.
To evaluate if the reduction of the tracking error was below the prescribed one, we found the ratio
between the spectra (determined by fast Fourier transform) of the error e
1
and of the reference q
r,1
.The
ratio is plotted on the left in Figure 15.22 (solid line), together with inverse of the weighting function
W
S
1
(dashed line). Apparently, the curve corresponding to the ratio is always below the weighting. Having
in mind the relation S
1
= e
1
/q
r,1
, it follows that condition (15.19) is satisfied, i.e., the specified error
reduction is realized. It appears that robust performance control of the RRR robot was realized in the
experiment.
The contribution of parasitic effects to the tracking performance can be evaluated from the cumulative
power spectra (CPSs) of the tracking errors. On the right in Figure 15.22 we show the CPSs of the errors
in the first robot joint achieved with both PDs and with the µ-synthesis controller. We may observe that
most of the signals’ energy lies within the bandwidth of the joint references (up to 5 Hz). Since above the
bandwidth none of the CPSs abruptly changes its slope, it appears that influence of the parasitic effects on
the trajectory tracking is eliminated, i.e., the design rule r.4 from subsection 15.3.2 is met with all feedback
controllers. Inspection of the given plots reveals the lowest energy content of the CPS related with the
µ-synthesis controller. This can be quantitatively verified by comparing the final CPS values in all joints,
presented in Table 15.3. The final CPSs represent the variances (squares of the standard deviations) of
TABLE 15.2 Ranges of the Joint Errors (in ×10
−3
radians)
i PD Equation (15.32) PD Equation (15.36) µ
1[−5.3, 4.3] [−2.5, 2.7] [−1.0, 1.0]
2[−3.9, 2.9] [−1.7, 2.8] [−1.0, 0.87]
3[−10.2, 17.7] [−4.1, 7.0] [−2.0, 2.2]
Copyright © 2005 by CRC Press LLC
Motion Control by Linear Feedback Methods 15
-21
TABLE 15.3 Variances of the Joint Errors (in ×10
−6
rad
2
/s
2
)
i PD Equation (15.32) PD Equation (15.36) µ
1 7.19 1.57 0.11
2 3.08 0.87 0.14
3 46.84 5.59 0.72
1102030
−70
−60
−50
−40
−30
−20
−10
0
10
20
Frequency (Hz)
Magnitude (dB)
4
6
8
×10
−6
CPS
0.5
1
1.5
CPS
10
0
0
0.5
1
CPS
Frequency (Hz)
10
1
10
2
×10
−6
×10
−7
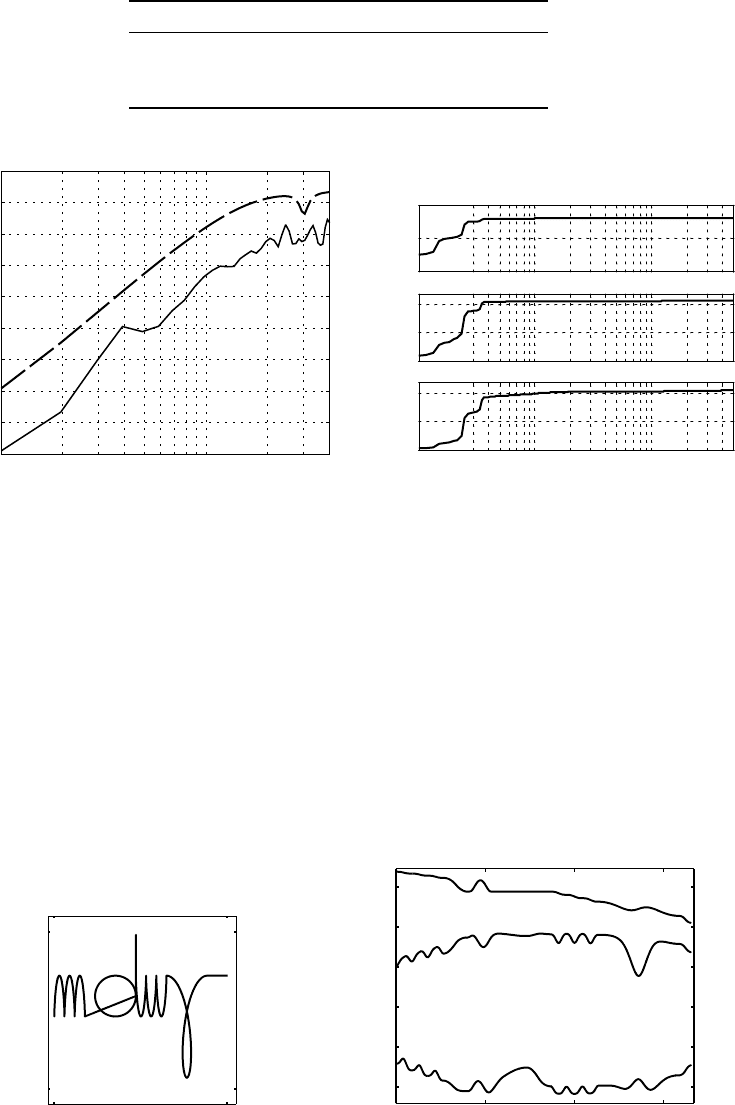
FIGURE 15.22 Results obtained for joint 1 in the first experiment: (left) the ratio between spectra of the position
error achieved with the µ-synthesis controller and of the position reference (solid) is below the prescribed weighting
1/W
S
1
(dashed); (right) the CPSs of the position errors achieved with PD (15.32) (top), PD (15.36) (middle), and
µ-synthesis controller (bottom).
the position errors. As obvious from the table, the variances achieved with the µ-synthesis controllers are
dramatically lower than the variances obtained with the conventional feedbacks.
In the second experiment the RRR robot performed the writing task [23], also considered in the chapter
on modeling and identification. For convenience, the reference tip path and the corresponding joint
motions are shown in Figure 15.23. The Cartesian position errors achieved with the PD (15.36) and with
the µ-synthesis controller are shown in Figure 15.24 with the grey and black lines, respectively. The latter
0369
−1.5
−0.75
0
0.75
1.5
2.25
Time (s)
Angles (rad)
q
r,
1
q
r,
2
q
r,
3
−0.3 0.25
0.35
0.85
x
(m)
z (m)
FIGURE 15.23 The writing task as the second experiment: (left) the tip path; (right) the joint motions.
Copyright © 2005 by CRC Press LLC
15
-22 Robotics and Automation Handbook
−6
0
11
×10
−4
e
x
(m)
−8
0
11
0369
−2.1
0
1.7
Time (s)
×10
−4
×10
−3
e
y
(m)
e
z
(m)
FIGURE 15.24 Cartesian errors in the second experiment achieved with the PD defined by Equation (15.36) (grey)
and with the µ-synthesis controller (black).
controller performed better than the former one along each direction. It achieved errors (black lines) less
than 0.5 mm, which is very accurate for a direct-drive robot.
15.5 Conclusions
Various aspects of manipulator motion control with linear feedback are considered in this chapter: per-
formance criteria, robustness issues, feedback control designs, etc. It is noted that the decentralized con-
ventional control is generally applicable, but its effects on motion performance can be limited if dynamic
couplings between the manipulator joints are emphasized. To enhance the performance, a model-based
compensation of the nonlinear dynamics should be applied. Two compensation approaches are consid-
ered — computed-torque and feedback linearization. The latter one facilitates an experimental approach
to the feedback control design. In this approach, the manipulator dynamics that remains after feedback
linearization is characterized from several frequency response functions identified directly on the system.
The identified dynamics are then used for feedback control designs. Several feedback control designs are
considered, with the emphasis on the tuning parts of these designs. Practical demonstration of the control
designs is done for an experimental direct-drive robotic manipulator. The presented experimental results
show superior performance of the advanced control design over the conventional ones.
References
[1] Fu,K.S., Gonzales, R.C., and Lee, C.S.G., Robotics: Control,Sensing, Vision, and Intelligence, McGraw-
Hill, London, 1987.
[2] Sciavicco, L. and Siciliano, B., Modeling and Control of Robot Manipulators, McGraw-Hill, London,
1996.
[3] Slotine, J.J.E. and Li, W., Applied Nonlinear Control, Prentice Hall, Upper Saddle River, NJ, 1991.
[4] Franklin, G.F., Powell, J.D., and Emami-Naeini, A., Feedback Control of Dynamic Systems, Prentice
Hall, London, 2001.
[5] Asada, H. and Youcef-Toumi, K., Direct-Drive Robots: Theory and Practice, MIT Press, London, 1987.
[6] Chen, Y., Replacing a PID controller by a lag-lead compensator for a robot — a frequency response
approach, IEEE Trans. Rob. Autom., 5, 174, 1989.
[7] Sage, H.G., de Mathelin, M.F., and Ostertag, E., Robust control of robot manipulators: a survey, Int.
J. Control, 72, 1498, 1999.
Copyright © 2005 by CRC Press LLC
Motion Control by Linear Feedback Methods 15
-23
[8] Steinbuch, M. and Norg, M.L., Advanced motion control, Europ. J. Control, 4, 278, 1998.
[9] Van Beek, B. and De Jager, B., RRR-robot design: basic outlines, servo sizing, and control, in Proc.
IEEE Int. Conf. Control Appl., Hartford, U.S.A., 1997, 36.
[10] Van Beek, B. and De Jager, B., An experimental facility for nonlinear robot control, in Proc. IEEE
Int. Conf. Control Appl., Hawaii, U.S.A., 1999, 668.
[11] Vukobratovi
´
c, M. and Potkonjak, V., Dynamics of Manipulation Robots: Theory and Application,
Springer-Verlag, Berlin, 1982.
[12] Nijmeijer, H. and van der Schaft, A., Nonlinear Dynamical Control Systems, Springer-Verlag, Berlin,
1991.
[13] Paden, B. and Panja, R., Globally asymptotically stable PD+ controller for robot manipulators, Int.
J. Control, 47, 1697, 1988.
[14] Sanathanan, C.K. and Koerner, J., Transfer function synthesis as a ratio of two complex polynomials,
IEEE Trans. Autom. Control, 8, 56, 1963.
[15] Koot, M., Kosti
´
c, D., De Jager, B., and Steinbuch, M., A systematic approach to improverobot motion
control, in Proc. Conf. on Mechantronics, Enschede, The Netherlands, 2002, 1377.
[16] Kosti
´
c, D., De Jager, B., and Steinbuch, M., Experimentally supported control design for a direct
drive robot, in Proc. IEEE Int. Conf. Control Appl., Glasgow, Scotland, 2002, 186.
[17] Kwakernaak, H., Robust control and H
∞
-optimization-tutorial paper, Automatica, 29, 255, 1993.
[18] Kwakernaak, H., MATLAB Marcos for Polynomial H
∞
Control System Optimization, Memorandum
No. 881, Department of Applied Mathematics, University of Twente, Enschede, The Netherlands,
1990.
[19] Zhou, K., Doyle, J.C., and Glover, K., Robust and Optimal Control, Prentice Hall, Upper Saddle River,
NJ, 1996.
[20] Balas, G.J., Doyle, J.C., Glover, K., Packard, A., and Smith, R., µ-Analysis and Synthesis Toolbox, The
MathWorks, Natick, MA, 1998.
[21] Anderson, B.D.O. and Moore, J.B., Optimal Control: Linear Quadratic Methods, Prentice Hall,
Englewood Cliffs, NJ, 1990.
[22] B
´
elanger, P.R., Dobrovolny, P., Helmy, A., and Zhang, X., Estimation of angular velocity and accel-
eration from shaft-encoder measurements, Int. J. Rob. Res., 17, 1225, 1998.
[23] Potkonjak, V., Tzafestas, S., Kostic, D., Djordjevic, G., and Rasic, M., Illustrating man-machine
motion analogy in robotics — the handwriting problem, IEEE Rob. Autom. Mag., 10, 35, 2003.
Copyright © 2005 by CRC Press LLC

16
Force/Impedance
Control for Robotic
Manipulators
Siddharth P. Nagarkatti
MKS Instruments, Wilmington, MA
Darren M. Dawson
Clemson University
16.1 Introduction
16.2 Dynamic Model
Joint-Space Model
•
Task-Space Model and Environmental
Forces
16.3 Stiffness Control
Controller Design
16.4 Hybrid Position/Force Control
Controller Design
16.5 Hybrid Impedance Control
Types of Impedance
•
Duality Principle
•
Controller Design
16.6 Reduced Order Position/Force Control
Holonomic Constraints
•
Reduced Order Model
•
Reduced
Order Controller Design
16.7 Background and Further Reading
16.1 Introduction
The convergence of the fields of robotics and automationin many industrial applications is well established.
During the execution of many industrial automation tasks, the robot manipulator is often in contact with
its environment (either directly or indirectly via an end-effector payload). For purely positioning tasks
such as spray painting that have negligible force interaction with the environment, controlling the manip-
ulator end-effector position results in satisfactory performance. However, in applications such as polishing
or grinding, the manipulator end effector will experience interaction forces from the environment. Fur-
thermore, due to contact with the environment, the motion of the end effector in certain directions is
restricted. In the field of robotics, this resulting motion is often referred to as constrained motion or
compliant motion. This chapter focuses on the control strategies of manipulators for constrained motion.
While there are many techniques that may be used to design controllers for constrained motion, a
popular active compliant approach is the use of force control. The fundamental philosophy is to regulate
the contact force of the environment. This is often supplemented by a position control objective that
regulates the orientation and the location of the end effector to a desired configuration in its environment.
For example, in the case of grinding applications, the motion of the manipulator arm is constrained by
the grinding surface. It can easily be seen that it is vital to control not only the position of the manipulator
end effector to ensure contact with the grinding surface but also the interaction forces to ensure sufficient
contact force to enable grinding action.
Copyright © 2005 by CRC Press LLC

16
-2 Robotics and Automation Handbook
Another example that illustrates the need for combining force and position controllers is drawing on
a blackboard with chalk. If a robot manipulator is required to draw multiple instances of one shape
(e.g., a circle) on the blackboard, the end-effector position must follow a specific (in this case, circular)
trajectory while ensuring that the chalk applies a certain amount of force on the blackboard. We know
that if the force is too small, the drawing may not be visible; however, if the force is too large, the chalk will
break. Moreover, as multiple instances of shapes are drawn, the length of the chalk reduces. Thus, one can
appreciate complexities and intricacies of simple tasks such as drawing/writing using chalk. This example
clearly illustrates the need for desired force trajectory in addition to a desired position trajectory. Another
example that motivates the use of a position/force control strategy is the pick-and-place operations using
grippers for glass tubes. Clearly, if the gripper closes too tight, the glass may shatter, and if it is too lose, it
is likely the glass may slip. The above examples establish the motivation for position and force control.
In many applications, the position/force control objectives are considerably more intertwined than in
the examples discussed thus far. Consider the example of a circular diamond-tipped saw cutting a large
block of metal, wherein the saw moves from one end to the other. The motion from one end to the other
manifests itself as the position control objective, whereas cutting the block of metal without the saw blade
binding is the force control objective. The speed of cutting (position control objective) depends on many
parameters, such as geometric dimensions and material composition. For example, for a relatively softer
metal such as aluminum, the saw can move safely from one end to the other much faster than in the case
of a relatively harder material such as steel. It is obvious that the cutting speed would be much faster for
thinner blocks of metal.
To achieve control objectives such as those discussed above, the controller must be designed to regulate
the dynamic behavior between the force exerted on the environment (force control objective) and the end
effector motion (position control objective). This approach forms the basis of impedance control.
In this chapter, we present the following four control strategies that control the force exerted by the
end effector on its environment in conjunction with the typical end effector position control for an n-link
robot manipulator:
r
Stiffness control
r
Hybrid position/force control
r
Hybrid impedance control
r
Reduced order position/force control
Furthermore, for each section, an example for a two-degree-of-freedom (2-DOF) Cartesian manipulator
is also presented.
Remark 16.1 It is important to note that for all the aforementioned strategies, the desired velocity
and force trajectories should be consistent with the environmental model [1]. If such is not the case, the
trajectories may be modified by techniques such as “kinestatic filtering” (see [1] for more details).
16.2 Dynamic Model
This section presents the formulation of the manipulator dynamics that facilitates the design of strategies
to control position and force. First, the widely known joint-space model is presented. Next, we define some
notation for the contact forces (sometimes referred to as interactive forces) exerted by the manipulator on
the environment by employing a coordinate transformation.
16.2.1 Joint-Space Model
The dynamics of motion for an n-link robotic manipulator [2] are constructed in the Euler-Lagrange form
as follows:
M(q)
¨
q + V
m
(q,
˙
q)
˙
q + N(q,
˙
q) + τ
e
= τ (16.1)
Copyright © 2005 by CRC Press LLC

Force/Impedance Control for Robotic Manipulators 16
-3
where
N(q,
˙
q) = F (
˙
q) + G(q)
(16.2)
M(q) ∈
n×n
denotes the inertia matrix, V
m
(q,
˙
q) ∈
n×n
contains the centripetal and Coriolis terms,
F (
˙
q) ∈
n
contains the static (Coulomb) and dynamic (e.g., viscous) friction terms, G(q) ∈
n
is the
gravity vector, τ
e
(t) ∈
n
represents the joint-space end-effector forces exerted on the environment by the
end-effector, q(t) ∈
n
represents the joint-space variable vector, and τ (t) ∈
n
is the torque input vector.
16.2.2 Task-Space Model and Environmental Forces
In order to facilitate the design of force controllers, the forces are commonly transformed into the task-
space via a Jacobian matrix by using a coordinate transformation [2]. Note that this Jacobian matrix is
defined in terms of the task-space coordinate system and dependent on the robot application. Specifically,
depending on the type of application, the axes (directions) of force control and motion may vary and are
captured by the definition of the Jacobian.
Toward formulating the task-space dynamics, we define a task-space vector x ∈
n
as follows:
x = h(q)
(16.3)
where h(q) is obtained from the manipulator kinematics and the joint and task-space relationships. The
derivative of the task-space vector is defined as
˙
x = J (q)
˙
q
(16.4)
where the task-space Jacobian matrix J (q) ∈
n×n
is defined as [2]
J (q) =
I 0
0 T
∂h(q)
∂q
(16.5)
with I being the identity matrix, 0 being the zero matrix, and the transformation matrix T is used to
convert joint velocities to derivatives of roll, pitch, and yaw angles associated with end-effector orientation.
It should be noted that the joint-space representation of the force exerted on the environment (defined
first in Equation (16.1)) can be rewritten as
M(q)
¨
q + V
m
(q,
˙
q)
˙
q + N(q,
˙
q) + J
T
(q) f = τ (16.6)
where f (t) ∈
n
denotes the vector of forces and torques exerted on the environment in task-space.
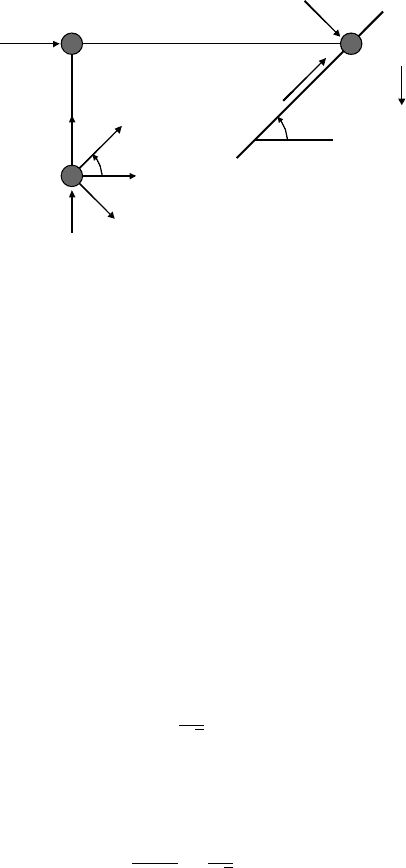
Example 16.1 Task-Space Formulation for a Slanted Surface
The following example presents the task-space formulation of the dynamics for a 2-DOF Cartesian ma-
nipulator (i.e., both joints are prismatic) moving along a slanted surface as shown in Figure 16.1. To that
end, the objectives are to formulate the manipulator dynamics and to decompose the forces exerted on
the slanted surface into tangential and normal components. The motion component of the dynamics can
easily be formulated from the unconstrained robot model. Thus, after removing the surface, and hence
the interaction forces f
1
and f
2
, the manipulator dynamics are constructed as follows:
M
¨
q + F (
˙
q) + G = τ
(16.7)
where
q =
q
1
q
2
, M =
m
1
0
0 m
1
+ m
2
, F =
F
1
(
˙
q
1
)
F
2
(
˙
q
2
)
, τ =
τ
1
τ
2
, G =
0
(m
1
+ m
2
)g
(16.8)
Copyright © 2005 by CRC Press LLC
16
-4 Robotics and Automation Handbook
45°
45°
v
u
t
1
t
2
f
1
f
2
q
1
q
1
q
2
q
2
q
2
=
q
1
− 3
g
FIGURE 16.1 Manipulator moving along a slanted surface [4].
Note that the explicit structure of the friction vector F is beyond the scope of the material presented in this
chapter.
The next step is to incorporate the contact forces. To that end, let x ∈
2
denote the task-space vector
defined as
x =
u
v
(16.9)
where u represents the normal distance to the surface and v represents the tangential distance to the
surfaceofafixed coordinate system. As discussed in Equation (16.3), the representation of the joint-space
coordinates into task-space is given by
x = h(q)
(16.10)
where h(q) is constructed based on the system geometry as follows:
h(q) =
1
√
2
q
1
−q
2
q
1
+q
2
(16.11)
Based on Equation (16.5) and Equation (16.11), the task-space Jacobian matrix can be constructed as
follows:
J =
∂h(q)
∂q
=
1
√
2
1 −1
11
(16.12)
It should be noted that the matrix T in Equation (16.5) is an identity matrix because the end-effector
angles are irrelevant to this problem. Following the procedure outlined in the previous section, the robot
manipulator equation can be formulated as follows:
M
¨
q + F (
˙
q) + G + J
T
f = τ (16.13)
where
f =
f
1
f
2
(16.14)
Remark 16.2 It should be noted that the normal force f
1
and the tangential force f
2
in Figure 16.1 are
drawn with respect to the task-space coordinate system.
Copyright © 2005 by CRC Press LLC

Force/Impedance Control for Robotic Manipulators 16
-5
16.3 Stiffness Control
Most early robot manipulators used in industrial automation were required to perform positional tasks
(e.g., spray painting). As a result, the robot manipulators were designed to be very rigid, and the control
strategies of choice were simple position controllers that achieved satisfactory positioning accuracy. How-
ever, in applications such as sanding and grinding, a rigid (or “stiff”) manipulator does not lend itself
favorably to the force control objective. If, however, the “stiffness” of the manipulator can be controlled
[3], the force control objective can be more easily accomplished. This section presents the stiffness control
formulation for an n-DOF robot manipulator and is followed by an example for a 2-DOF Cartesian robot.
16.3.1 Controller Design
The stiffness control objective for an n–link is formulated in this section. First, the force exerted by the
manipulator on the environment is defined as
f ≡ K
e
(x − x
e
)
(16.15)
where K
e
∈
n×n
is a diagonal, positive semidefinite,
1
constant matrix used to denote the environmental
stiffness with x
e
∈
n
being the task-space vector denoting static location of the environment.
A proportional-derivative type of controller can be designed as follows to achieve the multi-dimensional
stiffness control objective:
τ = J
T
(q)(−K
v
˙
x + K
p
˜
x) + N(q,
˙
q)
(16.16)
where the task-space tracking error is defined as
˜
x = x
d
− x
(16.17)
with x
d
denoting the desired constant end-effector position. After formulating the closed-loop error system
and performing a comprehensive stability analysis [4], it can be shown that for the ith diagonal element
of matrices K
e
and K
e
:
lim
t→∞
f
i
≈ K
pi
(x
di
− x
ei
) in the constrained directions
(16.18)
lim
t→∞
x
i
= x
di
in the unconstrained directions
The result in Equation (16.18) can be interpreted as follows. In the unconstrained task-space direction,
the desired steady-state setpoint is reached and the position control objective is achieved. In the constrained
task-space direction (with the assumption that K
ei
K
pi
for force control), the force control objective
is achieved and K
pi
may be interpreted as the manipulator stiffness in the task-space direction.
Example 16.2 Stiffness Control of a Cartesian Manipulator
The following example presents the design of a stiffness control strategy for the 2-DOF Cartesian manip-
ulator shown in Figure 16.1. The control objective is to move the end effector to a desired final position
v
d
while exerting a desired normal force f
d1
. In this example, the surface friction f
2
and the joint friction
are assumed to be negligible, and the normal force f
1
is assumed to satisfy the following relationship:
f
1
= k
e
(u − u
e
) (16.19)
1
A diagonal element of the matrix K
e
is zero if the manipulator is not constrained in the corresponding task-space
direction.
Copyright © 2005 by CRC Press LLC

16
-6 Robotics and Automation Handbook
To accomplish the control objective, the stiffness control algorithm is designed as follows:
τ = J
T
(q)(−K
v
˙
x + K
p
˜
x) +G(q)
(16.20)
where
˜
x =
u
d
− u
v
d
− v
(16.21)
u
d
denotes the desired normal position, the quantities τ , J (q), and G(q) retain their definitions of
Example 1, and the gain matrices can simply be selected as K
v
= k
v
I and K
p
= k
p
I with k
v
and k
p
being positive constants. It is important to select k
p
such that k
p
k
e
as required by the stiffness control
formulation. To satisfy the control objective, the desired normal position u
d
needstobespecified. To that
end, by using the first condition in Equation (16.18), we can solve for u
d
from the following equation:
f
d1
= k
p
(u
d
− u
e
) (16.22)
16.4 Hybrid Position/Force Control
An important disadvantage of the stiffness controller discussed in the previous section is that the desired
manipulator position and the desired forceexerted on the environmentare constants. That is, the controller
is restricted to a constant setpoint regulation objective. In applications such as polishing and deburring, the
end effector must track a prescribed path while tracking some desired force trajectory on the environment.
In such a scenario, the stiffness controller will not achieve satisfactory results.
To that end, another approach that simultaneously achievesposition and force tracking objectives is used.
The hybrid position/force controller developed in [5, 6] decouples the position and force control problems
into subtasks via a task-space formulation. This formulation is critical in determining the directions in
which force or position should be controlled. Once these subtasks are identified, separate position and
force controllers can be developed. In this section, we first present a hybrid position/force controller for an
n-link manipulator and then discuss this control strategy with respect to the 2-DOF Cartesian manipulator
shown in Figure 16.1.
16.4.1 Controller Design
The following hybrid position/force controller first uses feedback-linearization to globally linearize the
robot manipulator dynamics and then employs linear controllers to track the desired position and force
trajectories. To that end, by using the task-space transformation of Equation (16.3) to decompose the
normal and tangential surface motions and after some mathematical manipulation, the robot dynamics
can be expressed as
M(q)J
−1
(q)(
¨
x −
˙
J (q)
˙
q) + V
m
(q,
˙
q)
˙
q + N(q,
˙
q) + J
T
(q) f = τ (16.23)
Based on the structure of Equation (16.23) and the control objectives, a feedback-linearizing controller
for the above system can be constructed as follows:
τ = M(q)J
−1
(q)(
¯
y −
˙
J (q)
˙
q) + V
m
(q,
˙
q)
˙
q + N(q,
˙
q) + J
T
(q) f (16.24)
where
¯
y ∈
n
denotes the linear position and force control strategies. Note that from Equation (16.23)
and Equation (16.24), we have
¨
x =
¯
y
(16.25)
Copyright © 2005 by CRC Press LLC