Kurfess T.R. Robotics and Automation Handbook
Подождите немного. Документ загружается.

20
-12 Robotics and Automation Handbook
estimate the desired trajectory of the leader along the heading direction of the virtual caster to handle the
object in coordination with the leader. By using the virtual caster-like dynamics, which generates motion of
each follower passively based on the force/moment applied to it similar to the real caster, multiple mobile
manipulators could handle a single object in coordination without using the geometric relations among
robots. That is, this type of control algorithm is robust against the inevitable positioning errors of mobile
manipulators.
References
[1] Nakano, E., Ozaki, S., Ishida, T., and Kato, I., Cooperational control of the anthropomorphous
manipulator “MELARM,” Proc. 4th Int. Symp. Industrial Robots, pp. 251–260, 1974.
[2] Kurono, S., Coordinated computer control of a pair of artificial arms, Biomechanism, Vol. 3, pp. 182–
193, Tokyo University Press, Tokyo, 1975.
[3] Uchiyama, M., A unified approach to load sharing, motion decomposing, and force sensing of dual
arm robots, robotic research, 5th Int. Symp., pp. 225–232, MIT Press, Cambridge, MA, 1990.
[4] Luh, J.Y.S. and Zheng, Y.F., Constrained relations between two coordinated industrial robots for
motion control, Int. J. Robotics Res., Vol. 6, No. 3, pp. 60–70, 1987.
[5] Takase, K., Representation of constrained motion and dynamic control of manipulators under
constrained, Trans. SICE, Vol. 21, No. 5, pp. 508–513, 1985.
[6] Hayati, S., Hybrid position/force control of multi-arm cooperating robots, Proc. IEEE Int. Conf.
Robotics and Automation, pp. 82–89, 1986.
[7] Tarn, T.J., Bejczy, A.K., and Yun, X., Design of dynamic control of two coordinated robots in motion,
Proc. 24th IEEE Conf. Decision and Control, pp. 1761–1765, 1985.
[8] Hanafusa, H. and Asada, H., A robot hand withelastic fingers and its application to assembly process,
Proc. IFAC Symp. Inf. Control Probl. Manuf. Technol., pp. 127–138, 1977.
[9] Koga, M., Kosuge, K., Furuta, K., and Nosaki, K., Coordinated motion control of robot arms based
on the virtual internal model, IEEE Trans. Robotics and Automation, Vol. 8, No. 1, pp. 77–85, 1992.
[10] Nakamura, Y., Nagai, K., and Yoshikawa, T., Mechanics of coordinative manipulation by multiple
robotic mechanisms, Proc. IEEE Int. Conf. Robotics and Automation, pp. 991–998, 1987.
[11] Khatib, O., Object manipulation in a multi-effector robot system, Int. Symp. Robotics Res., Santa
Cruz, CA, August 1987.
[12] Zheng, Y.F. and Luh, J.Y.S., Optimal load distribution for two industrial robots handling a single
object, Proc. 1988 IEEE Int. Conf. Robotics and Automation, pp. 344–349, 1988.
[13] Pittelkau, M.E., Adaptive load sharing force control for two-arm manipulators, Proc. Int. Conf.
Robotics and Automation, pp. 498–503, 1988.
[14] Uchiyama, M. and Yamashita, T., Adaptive load sharing for hybrid control two cooperative manip-
ulators, Proc. IEEE Int. Conf. Robotics and Automation, pp. 986–991, 1991.
[15] Kosuge, K., Ishikawa, J., Furuta, K., and Sakai, M., Control of single-master multi-slave manipulator
system using VIM, Proc. 1990 IEEE Int. Conf. Robotics and Automation, pp. 1172–1177, 1991.
[16] Khatib, O., Yokoi, K., Chang, K., Ruspini, D., Holmberg, R., and Casal, A., Vehicle/arm coordination
and multiple mobile manipulator decentralized cooperation, Proc. IEEE/RSJ Int. Conf. Intelligent
Robots Syst., pp. 546–553, 1996.
[17] Yamamoto, Y. and Xiaoping, Y., Effect of the dynamic interaction on coordinated control of mobile
manipulators, IEEE Trans. Robotics and Automation, Vol. 12, No. 5, pp. 816–824, 1996.
[18] Kume, Y., Hirata, Y., Wang, Z., and Kosuge, K., Decentralized control of multiple mobile manip-
ulators handling a single object in coordination, Proc. IEEE/RSJ Int. Conf. Intelligent Robots Syst.,
pp. 2758–2763, 2002.
Copyright © 2005 by CRC Press LLC

21
Robot Simulation
Lonnie J. Love
Oak Ridge National Laboratory*
21.1 Introduction
21.2 Example Applications
Factory Floor Simulation
•
Nuclear Waste Remediation
Simulation
•
Surgical Simulation
21.3 Robot Simulation Options
Where Do You Start
•
Robot Design Packages
•
Animation
of Robot Motion
•
Simulation of Robot Dynamics
21.4 Build Your Own
Graphical Animation
•
Numerical Simulation
21.5 Conclusion
21.1 Introduction
Mention the topic robot simulation, and, like many phrases, it means many different things to different
people. To some practitioners, the simulation of robotic systems covers the visualization of how a robot
moves through its environment. These simulators are heavily based on CAD and graphical visualization
tools. In some cases, there is a man-machine interface so that the human can interact with the simulation.
Likewise, to some, robot simulation covers the numerical simulation of the dynamics, sensing, and control
of robots. Instead of having an interface that consists of three-dimensional (3D) graphical objects, these
simulators consist of software commands and/or graphical tools used to construct block diagrams of the
system. No matter the definition, simulation allows the practitioner to design and test robots in a variety
of environments for a fraction of the time and cost of building real systems.
In this chapter, we provide an overview of robot simulation. We begin with a short historical review and
examples of practical applications where simulation aided in solving challenging problems. While in no
way complete, the survey is intended to give the reader a flavor for the problems that many practitioners
address with simulation. In most cases, there are two levels of robot simulation. The first form of simulation
is based primarily on kinematics. Kinematic simulations neglect the dynamics and low level control
of the manipulator. The user specifies a target trajectory for the robot to follow and the simulation
translates Cartesian motion of the robot to the resulting joint motion. This form of robot simulation aids
in addressing a variety of issues in both the manipulator design and integration into the environment. The
ability to visualize the motion of the manipulator can quickly answer questions regarding path planning,
kinematic/workspace constraints, and coordination issues with other systems (scheduling, workspace
layout, and collision detection). A few simulation packages provide off-line programming capabilities.
The traditional approach to programming a robot consists of using an interface, such as a teach pendant,
∗
Oak Ridge National Laboratory is managed by UT-Battelle, LLC, for the U.S.Department of Energy under Contract
DE-AC05-00OR22725.
Copyright © 2005 by CRC Press LLC
21
-2 Robotics and Automation Handbook
to define the path and actions a robot is to execute during a task. This approach is time consuming
and requires taking the robot out of production during the programming phase. Off-line programming
integratessimulation withthe robot’sprogramming language. Advantagesof off-line programming include
a single programming system for multiple robots,verification of programs, and the abilityto rapidly change
the program and predict performance without taking the system off-line (Yong and Bonney, 1999).
In most cases, it is sufficient to neglect the robot’s dynamics when simulating robot motion. This is
perfectly valid when simulating commercial robots operating within the manufacturer’sspecifications
(payloads, accelerations, speeds). The primary motivation for including dynamics in the simulation is to
aid in the robot’s mechanical and/or control design. When this is the case, there are numerical simulation
tools based on physical principles that attempt to provide as high fidelity a prediction of the actual behavior
of the robot as possible. A good numerical simulation tool can not only aid in mechanical and control
design, but also establish actuator power requirements, selection of sensors, and performance metrics such
as maximum bandwidth, accuracy, resolution, and speed. One additional utility of robot simulation is to
aid in visualizing a concept to a colleague or sponsor. A good simulation can sometimes easily convey a
concept that is not clear with pictures or verbal explanations.
In reality, it is very difficult to list all of the possible advantages that can be obtained with a good robotic
simulation tool. The best gage for impact is simply experience: develop a high fidelity simulation and
experiment with the system before any hardware is designed and fabricated or components are purchased.
Only then can you fully appreciate the impact simulation can have on success. Our objective in this chapter
is to provide the reader with enoughinformation to make an informeddecision on the selection of a suitable
simulation platform and how best to get started.
21.2 Example Applications
21.2.1 Factory Floor Simulation
Robots are traditionally used for two types of tasks: boring or dangerous. In terms of boring, 90% of
robots operate in factories, of which 50% are devoted toward the automotive industry. In the early 1980s,
many automotive and aerospace companies began to integrate robotic systems into their production lines.
Simulation became a primary focus in terms of both arranging resources and off-line programming. The
designer of a robot system must determine an appropriate choice of robots and associated workspace
components (feeders, tools, grippers, fixtures, and sensors). As a recent example, Nissan used the robot
simulation program CimStation
®
Robotics to reduce production lead times by as much as a third for its
new Primera Sedan car. Robotic simulation software (see Figure 21.1 and Figure 21.2) was used to program
robots ahead of production, identifying potential problem areas such as spot welding access and workspace
configurations. According to Craig Grafton, BIW planning engineer at Nissan, robot simulation enabled
“offline programming to reduce downtime incurred by online programming.” Without simulation, it is
likelythat a propersolution would requiremanyiterations on the factory floor before a satisfactorysolution
is obtained. This is where powerful simulation tools are invaluable.
FIGURE 21.1 CimStation simulated floor (courtesy AC&E, Ltd.).
Copyright © 2005 by CRC Press LLC

Robot Simulation 21
-3
FIGURE 21.2 Factory floor (courtesy AC&E, Ltd.).
21.2.2 Nuclear Waste Remediation Simulation
In terms of dangerous applications of robotics, traditional areas focused on space based applications,
deep sea exploration, and handling radioactive equipment. The primary mission of Oak Ridge National
Laboratory (ORNL) during World War II was the processing of pure plutonium metal in support of the
Manhattan Project. Byproducts of this process include radioactive cesium-137 and strontium-90. Between
1943 and 1951, the Gunite and Associated Tanks (GAAT) at ORNL were built to collect, neutralize, and
store these byproducts. These tanks held approximately 75,000 gal of radioactive sludge and solids and
over 350,000 gal of liquid. Characterization studies of these tanks in 1994 indicated that the structural
integrity of some of the tanks was questionable. Consequently, there was a potential threat to human
health through possible contamination of soil and groundwater. These risks provided the motivation
for remediation and relocation of waste stored in the ORNL tanks. There were a number of factors that
complicated the remediation process. The material stored in these tanks ranged from liquid to sludge
and solid and was composed of organic, heavy metals, and radionuclides. Furthermore, the tanks, which
ranged from 12 to 50 ft in diameter, were located below ground and in the middle of the ORNL complex.
The only access to these tanks was through one to three access ports that were either 12 or 24 in. in diameter
(Van Hoesen et al., 1995). These characteristics provide a daunting challenge: How can material be safely
removed from such a confined structure?
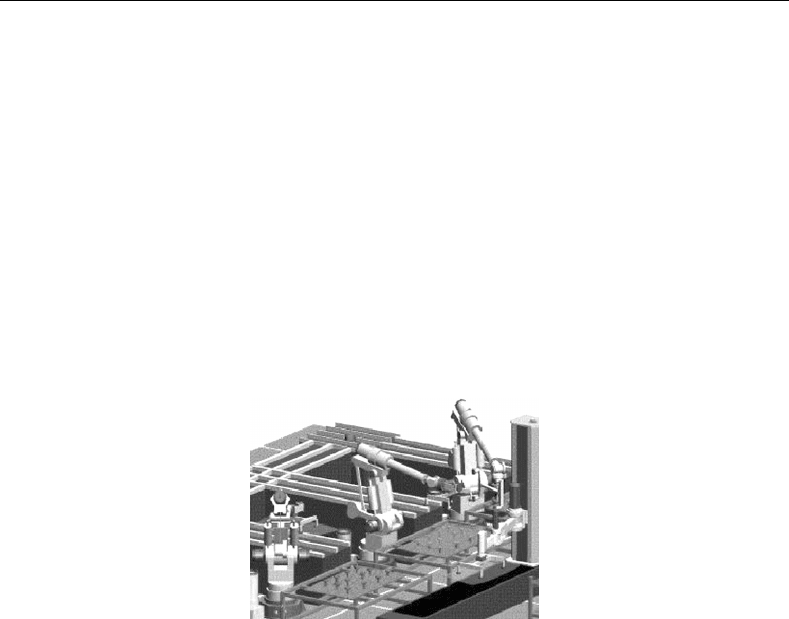
An integrated system model of the hardware, illustrated in Figure 21.3, was developed under DELMIA’s
IGRIP
®
simulation program to aide in designing the system and investigating any potential problems
that might arise during the remediation process. The system model included a detailed model of the spar
aerospace modified light duty utility arm (MLDUA), a dynamic model of the hose management arm
(HMA), and a flexible exhaust hose connecting the two arms. The goal of the simulation was threefold.
1. The model would provide a tool for operator training. The system could simulate teleoperation
input commands through the same interface available on the hardware aiding in operator training.
2. The model provideda benchmark for identifyingpotential mining strategies.As the operator moved
the system through the waste, the texture of the waste surface varied with the amount of material
remaining.
3. The model provided an interface capable of investigating alternative control strategies. Alternative
control strategies were easily imbedded in the simulation and executed during robotic and/or
teleoperation tasks.
21.2.3 Surgical Simulation
As illustrated in the previous example, robot simulation can aid in training. One emerging area that
is growing in terms of its dependence on robotics is surgery. Since its introduction in 1987, minimally
Copyright © 2005 by CRC Press LLC

21
-4 Robotics and Automation Handbook
FIGURE 21.3 Gunite and associated tank hardware (courtesy Oak Ridge National Laboratory).
invasive surgery (MIS) has revolutionized the surgical field in a very short period of time (Cushieri,
1995). However, laparoscopy requires a unique subset of surgical skills that, for the inexperienced, can
significantly delay the development of basic operative skills. Unfortunately financial constraints limit
the time a physician can spend in the operating room for training. The cost of using operating room
time for training surgical residents in the United States is estimated at $53 million per year (Bridges and
Diamond, 1999). Subsequently, there has been growing interest in the development of robotic surgical
simulators that combine virtual reality and haptics for realistic laparoscopic surgical training. The Mentice
Corporation sells advanced medical simulation software and systems for a wide range of applications. As
an example, Procedicus
®
MIST, shown in Figure 21.4, is a computer-based system designed to teach and
assess minimally invasive surgical skills. The system comprises a frame holding two standard laparoscopic
instruments electronically linked to a low-cost personal computer. The screen displays the movement of
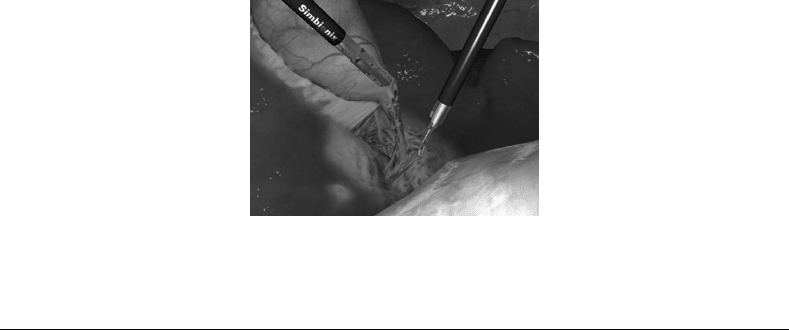
the surgical instruments in real-time 3D graphics. Advancements in computing and animation permit
visual displays that provide smooth and realistic views of the internal organs. Figure 21.5 shows an example
of the animation capabilities of Simbionix LapMentor
TM
software.
FIGURE 21.4 Procedicus MIST surgical trainer (courtesy Mentice, Inc.).
Copyright © 2005 by CRC Press LLC
Robot Simulation 21
-5
FIGURE 21.5 Simbionix virtual patient (courtesy Simbionix, Inc.).
21.3 Robot Simulation Options
21.3.1 Where Do You Start
Figuring out where to start is always the most important step. Making the wrong choice can end up costing
valuable time and money. In this section, we provide a summary of some of the systems available today
along with a list of distinguishing features. In addition, we will provide the reader with a list of questions
to consider. Sometimes, knowing the right question is as important as finding the right answer.
In robotic simulation, there are potentially three types of software packages the practioner may use.
First is a design (CAD) package such as Pro/Engineer,
®
SolidWorks,
®
or AutoCAD
®
. Each of these pack-
ages provides the ability to construct 3D solid models, machine drawings, and assemblies. Some of these
packages include the ability to simulate motion. In many cases, this may be sufficient in terms of the
design of the system. However, it is possible that the practitioner is interested in the programming of
the robot and its behavior in its environment. In this case, we need to consider using a more traditional
robot simulation package that is devoted towards animation for visualization of robot motion such as
AC&E’s CimStation Robotics and DELMIA’s IGRIP. These packages focus more on off-line programming
and animation than design. Both packages include a modeling component that enables the construction
of the robot kinematics. In some cases it is possible to import the robot kinematics from many of the
previously mentioned CAD packages. As mentioned earlier, some of these simulation packages have the
ability to program and test the robot in its factory setting prior to implementation of any hardware. This
is extremely attractive when purchasing off-the-shelf components and integrating into a factory setting.
However, if the practitioner is designing his own robot and wants to explore the low level control and
behavior of the robot, he may be in need of something a little more sophisticated (and complex). In this
case, the practitioner will be working with a numerical simulation tool that provides insight into the
dynamics and control of the system. In the past, this process required a great deal of effort to formulate
the dynamic equations of motion for a multi-body system. However, computation tools have greatly
simplified this process. First, some CAD packages, such as SolidWorks, have developed interface software
that automates the computation of the dynamic equations of motion and translates the equations into
numerical simulation tools such as Matlab
®
and Simulink
®
. As an example, the engineer designs the
mechanical system in SolidWorks then uses Simulink to design and test the controller. If the CAD package
does not enable this translation, it is possible to use symbolic tools to rapidly and accurately compute
the dynamic equations of motion and import them into simulation packages. In the last part of this
chapter, we provide a simple example of how to symbolically compute the dynamic equations of motion
of multi-degree of freedom serial link manipulators.
21.3.2 Robot Design Packages
If the practitioner is designing robots, the latest CAD tools provide a great deal of flexibility in terms
of simulating robot motion. First, in some cases, the design software has direct animation capabilities.
Copyright © 2005 by CRC Press LLC

21
-6 Robotics and Automation Handbook
Second, many CAD packages provide the ability to export the assembly (for example in a VRML format)
and animate the motion with another software package. Finally, there are a few instances in which it is
possible to export the system dynamics to the simulation directly from the CAD package. In each of these
cases, it is possible to provide some insight into the behavior of the robot during the design process.
There are three popular design software packages that have similar capabilities and costs: SolidWorks,
1
Pro/Engineer,
2
and AutoCAD.
3
For brevity, we provide a brief description of SolidWorks to provide insight
into the flexibility and capabilities of present-day computer aided design (CAD) packages. The primary
intent is to provide the reader with both a starting point, if interested in design, and an overview of
how each of these packages can be exploited for both the animation and dynamic simulation of robotic
systems.
The latest CAD packages provide a wide range of capabilities. As an example, SolidWorks is a com-
mercial, windows-based, 3D mechanical design software package. The designer can use this package to
develop 3D parts, draft machine drawings, and seamlessly integrate the parts into an assembly. SolidWorks
provides the ability to define constraints between parts. The constraints include joint motion: revolute,
cylindrical, spherical, universal, translational, screw, planar, fixed, and isotropic bushings. After defining
the constraints, it is possible to reconfigure the assembly in SolidWorks to identify any possible conflicts
in terms of the system’s kinematics. In addition, it is possible to export the geometry for animation in
a different package. For example, SolidWorks, ProE
®
, and AutoCAD provide the ability to export their
respective assemblies in a VRML format. It is then possible to import these models directly into a VRML-
compatible emulator to animation motion. The advantage of this approach is that the same package that
is used for the mechanical design can be exploited for animation. Many of these packages also include the
ability to calculate mass properties of each component. As with the animation, it is possible to import these
properties and models into dynamic simulation packages (such as Adams
®
and Cosmos) to provide real-
istic dynamic simulation of the system. In some cases (as will be discussed shortly), it is possible to embed
the dynamic simulation capabilities directly into the design software, eliminating any file compatability
issues.
So, some possible questions the reader may wish to consider for the CAD package:
r
Does the package include the ability to simulate motion?
If designing a robot, the ability to rapidly simulate motion can identify possible flaws in the
design.
r
What types of file formats are compatible?
If you want to quickly iterate on a kinematic design, you want to make sure that there is a seamless
translation between the CAD and simulation package.
r
Does the package include the ability to estimate and export dynamic properties?
Many packages provide an interface to estimate mass properties of the parts. In addition, some
packages, like SolidWorks, include interfaces to Adams and Simulink to enable estimation of the
multi-body dynamics. This is important only if you are designing a robot or experimenting with
the low-level controls.
r
Can you get a trial version of their software?
Some CAD packages can take a long time to learn. No company is going to tell you that their
software is not user friendly. So, obtaining a trial version and spending a little time up front can
save you a lot of time and money in the long run.
r
Does the package have backwards compatibility to current/previous CAD applications?
You will want the ability to use legacy work.
1
http://www.solidworks.com
2
http://www.ptc.com/
3
http://www.autodesk.com/autocad
Copyright © 2005 by CRC Press LLC
Robot Simulation 21
-7
21.3.3 Animation of Robot Motion
The advancement of computing and graphical animation technologies has provided tremendous advance-
ments in the area of robot animation. Early versions of robot simulation packages were based on simple
wireframe models of the robot’s kinematics. Today’s simulation packages provide shading, textures, levels
of sophistication, and fidelity that rival computer animation. In this section, we attempt to provide a
sampling of a few commercial packages that range in both capabilities as well as costs. Our objective is to
provide you, the reader, with an idea of what you can achieve given your budgetary constraints.
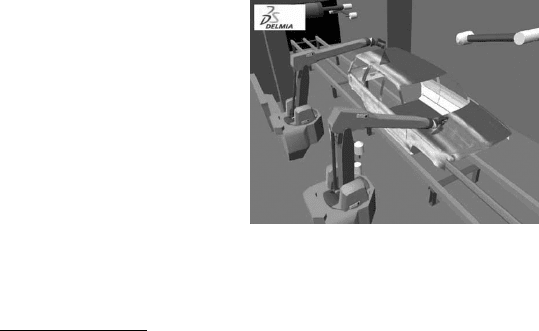
21.3.3.1 High End Robot Simulation Packages
DELMIA’s IGRIP
4
is an example of the high end simulation packages. In the introductory section, one of
the examples (nuclear waste cleanup) exploited IGRIP to answer basic questions prior to implementation
of complex robotic systems. Typical issues that IGRIP was designed to address include process planning,
ergonomics, factory floor layout, and process simulation. IGRIP includes the ability to include commercial
robotic and peripheral equipment, motion attributes, I/O logic, and kinematic motion limitations. The
primary utility of IGRIP is to develop simulations and programs that aid in optimization of robot locations,
motions, and cycle times and identify possible collisions between robots, parts, tools, and fixtury (see
Figure 21.6 and Figure 21.7).
Packages such as IGRIP and AC&E’s CimStation Robotics (formerly Silma) are designed more for the
simulation and modeling of robotic systems in workcells. In both cases, the software has a CAD interface
to aid in the modeling of the robots and workcells. A robot is defined as a collection of parts. Each part
is made up of a number of primitives (blocks, cylinders, cones, wedges, spheres. . . ), enabling a great
deal of details. Each of these primitives can be translated and rotated relative to each other in the CAD
world. When constructing the model, joints (prismatic or rotary) are defined to specify the relationship
between adjoining parts on the robot. Models can be translated from other CAD systems using formats
such as IGES, VDA, and DES. Once the model of the robot is defined, there are a number of ways to
command motion. The easiest approach is to move the robot joint by joint, incrementally changing each
joint displacement and observing the resulting motion. However, in many cases we are concerned with
how the robot behaves when commanding a specific motion of the tip of the robot. Most robots are defined
as a combination of rotary and prismatic joints and links. In IGRIP, the robot kinematic parameters are
represented using the Denavit-Hartenberg (D-H) notation. This notation provides a specific procedure for
specifying the coordinate system of each robot link at appropriate locations. The motivation for using this
approach is its universal appeal. All robots can be defined as a combination of rotary and prismatic joints.
The D-H parameters provide a well-defined parametric approach to specify the kinematics of the robot.
FIGURE 21.6 Simulated workcell (courtesy DELMIA Corp.).
4
http://www.delmia.com/index.html
Copyright © 2005 by CRC Press LLC

21
-8 Robotics and Automation Handbook
FIGURE 21.7 Eronomic simulation (courtesy DELMIA Corp.).
IGRIP provides, as of the late 1990s, over 32 kinematic routines (e.g., solutions to both the forward and
inverse kinematics for a host of robot configurations). If the robot can adopt one of these configurations,
the solution for the forward and inverse kinematics can be directly incorporated into the simulation.
However, the package also enables the inclusion of your own kinematic routine if desired. Basically, the
user writes C code that contains the solution for the forward and inverse kinematics. The IGRIP interface
provides the ability to use this code instead of the canned kinematic solutions. If using a commercial
robot, IGRIP has over 55 models that can be directly imported into your simulated workcell. Once the
robots and workcell are defined, the user defines tag points. The tag points represent the target points of
the path the robot tip is to follow. The simulation uses simple path planning routines to generate desired
positions and velocities for the robot as a function of time. The inverse kinematic solution transforms
these desired tip motions into joint motion. The simulation then animates the resulting motion of the
robot. During the simulation, the software checks for problems such as collisions, singularities, and joint
limits. Furthermore, some packages include the ability, if using a commercial robot, to export the resulting
path planning and program to the actual robot controller. These capabilities can be extremely valuable,
especially when modifying an assembly line; it is possible to test a workcell layout without stopping the
assembly line. Furthermore, you can test a wide variety of programs before finally exporting the code to
the actual hardware. All of these capabilities come at a cost. A commercial license from AC&E’s CimStation
Robotics costs approximately $35,000.
21.3.3.2 Low Cost Robot Simulation Packages
An example of a lower cost solution is RoboWorks
®
by Newtonium.
5
This package clearly lacks the
sophisticationand flexibility of the more mature packagessuch as IGRIP andAC&E’s CimStation.However,
with this lack of sophistication is a lower cost ($249) and shorter learning curve. Unlike IGRIP and
CimStation, it is not possible at this time to import the geometries of your target robotic system from CAD
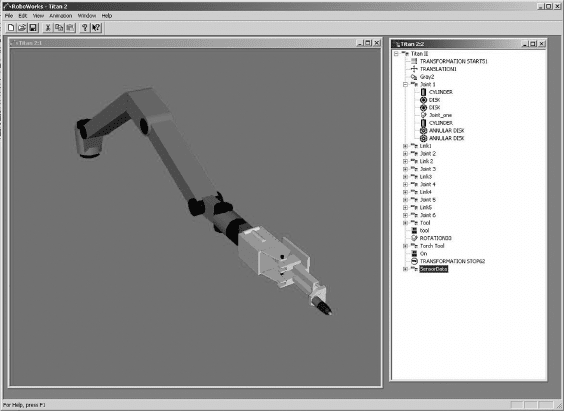
software into the RoboWorks simulation package. RoboWorks provides two windows to define the robot,
shown in Figure 21.8. One window shows the model and the other is a tree structure that you use to define
the robot’s geometry. A robot is defined by two basic elements: shapes and transformations. Shapes are the
geometry associated with the links of the robot. Transformations provide the joints (both translation and
orientation), links, and shapes on the links. These transformations can be either static or dynamic. Static
transformations are used to define the transformation from one shape on a link to the next. Dynamic
transformations are used to define the motion of a joint. When building the model, the tree structure is
used to define the robot (geometry and transformations).
5
http://www.newtonium.com/
Copyright © 2005 by CRC Press LLC
Robot Simulation 21
-9
FIGURE 21.8 ORNL’s RoboWorks model of a schilling Titan II.
There are three basic methods of commanding joint motion on the simulation: keyboard commands,
reading a text file of time vs. displacements for each joint, or through a standard TCP/IP interface.
So, some possible questions the reader may wish to consider for the animation package:
r
How do you construct the model of the robot?
Most simulation packages have an internal CAD system for constructing the model. Try to under-
stand its limitations (portability, degrees of freedom, joint types, ease of use).
r
Can you import other file formats?
Many CAD packages have translators that export the robot assembly into a VRML (or similar) file
format that is used in many animations packages.
r
Does the package support any off-the-shelf robots?
Some robot manufacturers provide very accurate CAD models to some simulation packages. For
example, Adept has a close association with CimStation.
r
Is it possible to provide some level of off-line programming?
One of the key benefits of robot simulation for manufacturing is the ability to program the robot
prior to installation in the factory.
r
What methods are available for planning motion? How do you actually plan motion?
If you can only provide joint level motion commands, you will need to know how to solve for the
inverse kinematics and have the ability to import these data into the simulation. Some packages
have inverse kinematic solutions that enable the user to command Cartesian motion.
r
Can you get a free trial version of the software?
Thisis the best way to understand the capabilities andlimitations ofthe software priortocommitting
resources (time and money).
21.3.4 Simulation of Robot Dynamics
The emphasis of robot simulation up to this point has been kinematic visulation. Basically, we assume the
dynamics of the robot have no role in the behavior of the robot. When planning a workcell in a factory,
using off-the-shelf components operating within their specified limits, most questions (workcell layout,
Copyright © 2005 by CRC Press LLC