Крамаренко А.А., Широких Л.А. Лекции по строительной механике стержневых систем. Часть 3: Статически неопределимые системы. Метод сил
Подождите немного. Документ загружается.

ЛЕКЦИИ
ПО СТРОИТЕЛЬНОЙ МЕХАНИКЕ
СТЕРЖНЕВЫХ СИСТЕМ
ЧАСТЬ 3
С
ТАТИЧЕСКИ НЕОПРЕДЕЛИМЫЕ СИСТЕМЫ
МЕТОД СИЛ
НОВОСИБИРСК 2002
МИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
НОВОСИБИРСКИЙ ГОСУДАРСТВЕННЫЙ АРХИТЕКТУРНО-СТРОИТЕЛЬНЫЙ
УНИВЕРСИТЕТ
А.А. Крамаренко, Л.А. Широких
ЛЕКЦИИ
ПО СТРОИТЕЛЬНОЙ МЕХАНИКЕ
СТЕРЖНЕВЫХ СИСТЕМ
ЧАСТЬ 3
С
ТАТИЧЕСКИ НЕОПРЕДЕЛИМЫЕ СИСТЕМЫ
МЕТОД СИЛ
НОВОСИБИРСК 2002
УДК 624.041.1
ББК 38.112
К 777
Крамаренко А.А.
ЛЕКЦИИ ПО СТРОИТЕЛЬНОЙ МЕХАНИКЕ СТЕРЖНЕВЫХ СИСТЕМ. Ч. 3. СТАТИ-
ЧЕСКИ НЕОПРЕДЕЛИМЫЕ СИСТЕМЫ. МЕТОД СИЛ / А.А. Крамаренко,
Л.А. Широких. – Новосибирск: НГАСУ, 2002. – 144 с.
А.А. КРАМАРЕНКО
Л.А. ШИРОКИХ
ISBN–5-7795-0093-2
В третью часть настоящего учебного издания включено шесть лек-
ций, посвящённых определению перемещений в статически определи-
мых системах в матричной форме, теоремам взаимности строительной
механики, общей характеристике и расчёту статически неопределимых
систем методом сил на силовые, температурные и кинематические воз-
действия.
Лекции разработаны для студентов безотрывных форм обучения в
соответствии с
требованиями государственного стандарта высшего
профессионального образования к обязательному минимуму содержа-
ния и уровню подготовки бакалавров по направлению 550100 "Строи-
тельство" и инженеров по специальностям 290300 "Промышленное и
гражданское строительство", 290400 "Гидротехническое строительст-
во", 290500 "Городское строительство и хозяйство", 291400 "Проекти-
рование зданий". Отдельные лекции и параграфы могут быть рекомен-
дованы студентам других специальностей направления "Строительство".
Компьютерный набор выполнен инженером А.И. Боевой
Печатается по решению издательско-библиотечного совета НГАСУ
Рецензенты:
⎯ В.А. Шутов, д.т.н., профессор, завкафедрой
общетехнических дисциплин (НГАХА);
⎯ В.К. Фёдоров, к.т.н., профессор кафедры инженерной
геологии, оснований и фундаментов (НГАСУ)
ISBN–5-7795-0093-2
©
©
НГАСУ, 2002
Крамаренко А.А.,
Широких Л.А., 2002
Учебное издание
Крамаренко Анатолий Алексеевич
Широких Людмила Алексеевна
ЛЕКЦИИ ПО СТРОИТЕЛЬНОЙ МЕХАНИКЕ
СТЕРЖНЕВЫХ СИСТЕМ
Ч
АСТЬ 3
С
ТАТИЧЕСКИ НЕОПРЕДЕЛИМЫЕ СИСТЕМЫ
МЕТОД СИЛ
Темплан 2002 г.
Редактор Г.К. Найдёнова
Санитарно-эпидемиологическое заключение
№ 54.НЦ. 02.953.П.127.10.01 от 01.10.2001 г.
Подписано к печати 22.10.2002. Формат 60х84 1/16 д.л.
Гарнитура Таймс. Бумага газетная. Ризография.
Объём 8,4 уч.-изд.л.; 9,25 п.л. Тираж 250 экз. Заказ №
Новосибирский государственный архитектурно-
строительный университет
630008, Новосибирск, ул. Ленинградская, 113
Отпечатано мастерской оперативной полиграфии НГАСУ

3 4
ОГЛАВЛЕНИЕ
Лекция тринадцатая. ОПРЕДЕЛЕНИЕ ПЕРЕМЕЩЕНИЙ В
МАТРИЧНОЙ ФОРМЕ ......................................4
Лекция четырнадцатая. ОБЩИЕ СВЕДЕНИЯ О СТАТИЧЕСКИ
НЕОПРЕДЕЛИМЫХ СИСТЕМАХ ................41
Лекция пятнадцатая. ТЕОРЕМЫ ВЗАИМНОСТИ
СТРОИТЕЛЬНОЙ МЕХАНИКИ ....................50
Лекция шестнадцатая. РАСЧЁТ СТАТИЧЕСКИ
НЕОПРЕДЕЛИМЫХ СИСТЕМ МЕТОДОМ
СИЛ НА СИЛОВОЕ ВОЗДЕЙСТВИЕ ...........59
Лекция семнадцатая. РАСЧЁТ СТАТИЧЕСКИ
НЕОПРЕДЕЛИМЫХ СИСТЕМ МЕТОДОМ
СИЛ НА ТЕМПЕРАТУРНОЕ
И КИНЕМАТИЧЕСКОЕ ВОЗДЕЙСТВИЕ .98
Лекция восемнадцатая. УЧЁТ СИММЕТРИИ СТАТИЧЕСКИ
НЕОПРЕДЕЛИМЫХ СООРУЖЕНИЙ ПРИ
ИХ РАСЧЁТЕ МЕТОДОМ СИЛ ................134
БИБЛИОГРАФИЧЕСКИЙ СПИСОК................................................144
ЛЕКЦИЯ ТРИНАДЦАТАЯ
ОПРЕДЕЛЕНИЕ ПЕРЕМЕЩЕНИЙ В МАТРИЧНОЙ
ФОРМЕ
13.1. Понятие о матрице перемещений
13.2. Вычисление интегралов формулы Мора в мат-
ричной форме в случае произвольных подынте-
гральных функций
13.3. Вычисление интегралов формулы Мора в мат-
ричной форме в случае линейных подынте-
гральных функций Ф
ik
(s), Ф
Fk
(s)
13.4. Определение перемещений от силового воздей-
ствия
13.5. Определение перемещений от температурных
воздействий
13.6. Определение перемещений от кинематических
воздействий
13.7. Определение перемещений от воздействий раз-
личного характера
13.8. Вопросы для самопроверки
13.9. Рекомендуемая литература
13.1. Понятие о матрице перемещений
В инженерных расчётах часто возникает необходимость оп-
ределения группы различных перемещений узлов и сечений за
-
данного сооружения от независимых друг от друга внешних воз-
действий – силовых, температурных, кинематических. Таблица
величин этих перемещений, составленная по определенным пра-
вилам, называется матрицей перемещений.
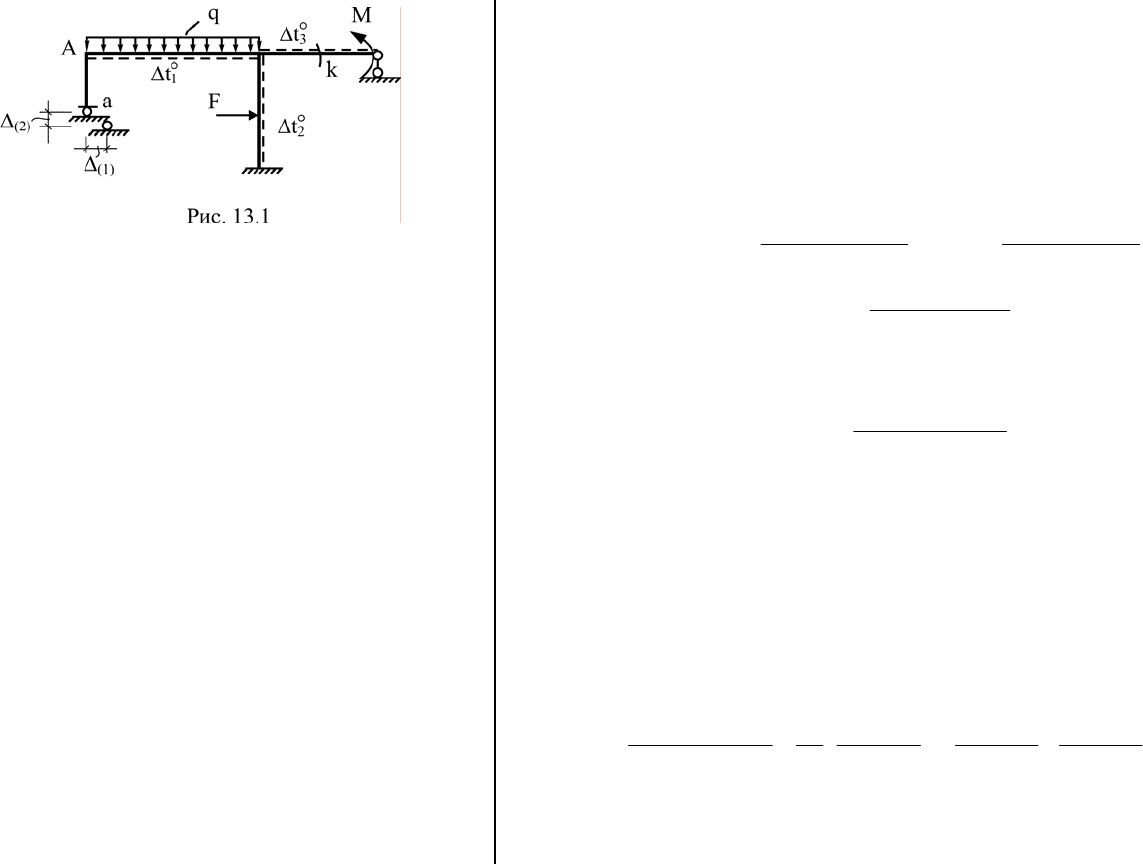
Например, в раме, показанной на рис. 13.1, требуется опре-
делить горизонтальное перемещение узла А, вертикальное пере-
мещение сечения "к" и угол поворота сечения "а" отдельно от
равномерно распределенной нагрузки q, сосредоточенной силы F,
сосредоточенного момента М, изменения температуры
o
3
o
2
o
1
t,t,t ΔΔΔ
и смещения опорных связей Δ
(1)
, Δ
(2)
. Установим
следующий порядок формирования матрицы перемещений. В её
5 6
первой строке будем
фиксировать только
величины горизон-
тального перемеще-
ния узла А, во второй
– вертикального пере-
мещения сечения "к",
в третьей – угла пово-
рота сечения "а". По-
рядок записи величин искомых перемещений в каждой строке за-
висит от принятой нумерации внешних воздействий. Для нашего
примера примем: первое воздействие – равномерно распределён-
ная нагрузка q, второе – сосредоточенная сила F, третье – сосре-
доточенный момент М, четвёртое – изменение температуры
o
3
o
2
o
1
t,t,t ΔΔΔ
, пятое – смещение опорных связей Δ
(1)
, Δ
(2)
. С учё-
том установленных правил получим матрицу перемещений
Δ =
⎟
⎟
⎟
⎟
⎠
⎞
⎜
⎜
⎜
⎜
⎝
⎛
θθθθθ
ΔΔΔΔΔ
ΔΔΔΔΔ
)c()t()M()F()q(
)c(
ky
)t(
ky
)M(
ky
)F(
ky
)q(
ky
)c(
Ax
)t(
Ax
)M(
Ax
)F(
Ax
)q(
Ax
aaaaa
.
В общем случае для любой задачи число строк матрицы пе-
ремещений равно числу определяемых перемещений различного
характера, а число столбцов – числу независимых внешних воз-
действий (собственный вес конструкций, снег, ветер, технологи-
ческая нагрузка, изменение температуры, смещение опорных свя-
зей и т.д.). В первом столбце матрицы перемещений принято за-
писывать
группу искомых перемещений от постоянной нагрузки.
В настоящей лекции рассматривается вычисление элементов
матриц перемещений в матричной форме. Для успешного усвое-
ния материала этой и последующих лекций читателям полезно
повторить некоторые разделы линейной алгебры, связанные с
действиями транспонирования, сложения, вычитания, умножения
и обращения матриц.
13.2. Вычисление интегралов формулы Мора в матричной
форме
в случае произвольных подынтегральных
функций
В одиннадцатой лекции (см. Крамаренко А.А. Лекции по
строительной механике стержневых систем. Ч. 2. Статически оп-
ределимые системы: Курс лекций / А.А. Крамаренко. – Новоси-
бирск: НГАСУ, 2002. – п. 11.4) было отмечено, что определённые
интегралы всех членов формулы Мора
∑
∫
∑
∫
∑
∫
=
=
τ
=
+
++=Δ
N
n
1k
0
k
Fkik
n
1k
0
k
Fkik
k
n
1k
0
k
Fkik
jk
k
Q
k
M
k
)s(EA
ds)s(N)s(N
)s(GA
ds)s(Q)s(Q
k
)s(EJ
ds)s(M)s(M
l
ll
имеют одинаковую структуру и в обобщённой форме могут быть
представлены следующим образом:
∫
ΦΦ
k
0
k
Fkik
)s(T
ds)s()s(
l
. (13.1)
Здесь Ф
ik
(s) – общее представление функций внутренних усилий
М
ik
(s), Q
ik
(s), N
ik
(s) от единичного фактора, приложенного в на-
правлении определяемого перемещения; Ф
Fk
(s) – представление
функций внутренних усилий М
Fk
(s), Q
Fk
(s), N
Fk
(s) от заданного
силового воздействия; T
k
(s) – представление функций, описы-
вающих изменение жесткостей поперечных сечений EJ
k
(s),
GA
k
(s), EA
k
(s) и параметра k
τk
вдоль оси k-го грузового участка.
Численное значение определённого интеграла (13.1) можно
получить по формуле Симпсона в матричной форме
.P
TT
4
T
6)s(T
ds)s()s(
Fkk
ik
k
Fkik
k
Fkik
k
Fkik
k
Т
)е(
)е()е(
)с(
)с()с(
)в(
)в()в(
k
0
k
Fkik
ΦΦ=
=
⎟
⎟
⎟
⎠
⎞
⎜
⎜
⎜
⎝
⎛
ΦΦ
+
ΦΦ
+
ΦΦ
=
ΦΦ
∫
l
l
(13.2)
В соотношении (13.2):
7 8
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
Φ
Φ
Φ
=Φ
)е(
)с(
)в(
ik
ik
ik
ik
;
[
]
)е()с()в(
Т
ikikik
ik
ΦΦΦ=Φ ;
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
Φ
Φ
Φ
=Φ
)е(
)с(
)в(
Fk
Fk
Fk
Fk
;
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
=
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
=
)e(
k
0
)c(
k
0
)в(
k
0
0
k
)e(
k
)c(
k
)в(
k
k
k
T
T
00
0
T
T
40
00
T
T
T6
T
1
00
0
T
4
0
00
T
1
6
P
ll
;
T
ik
Φ – матрица, транспо-
нированная по отноше-
нию к матрице Ф
ik
;
)в(
k
)в(
Fk
)в(
ik
T,, ΦΦ – значе-
ние функций, входящих в
подынтегральное выра-
жение (13.1) в начале ин-
тервала;
)c(
k
)c(
Fk
)c(
ik
T,, ΦΦ –
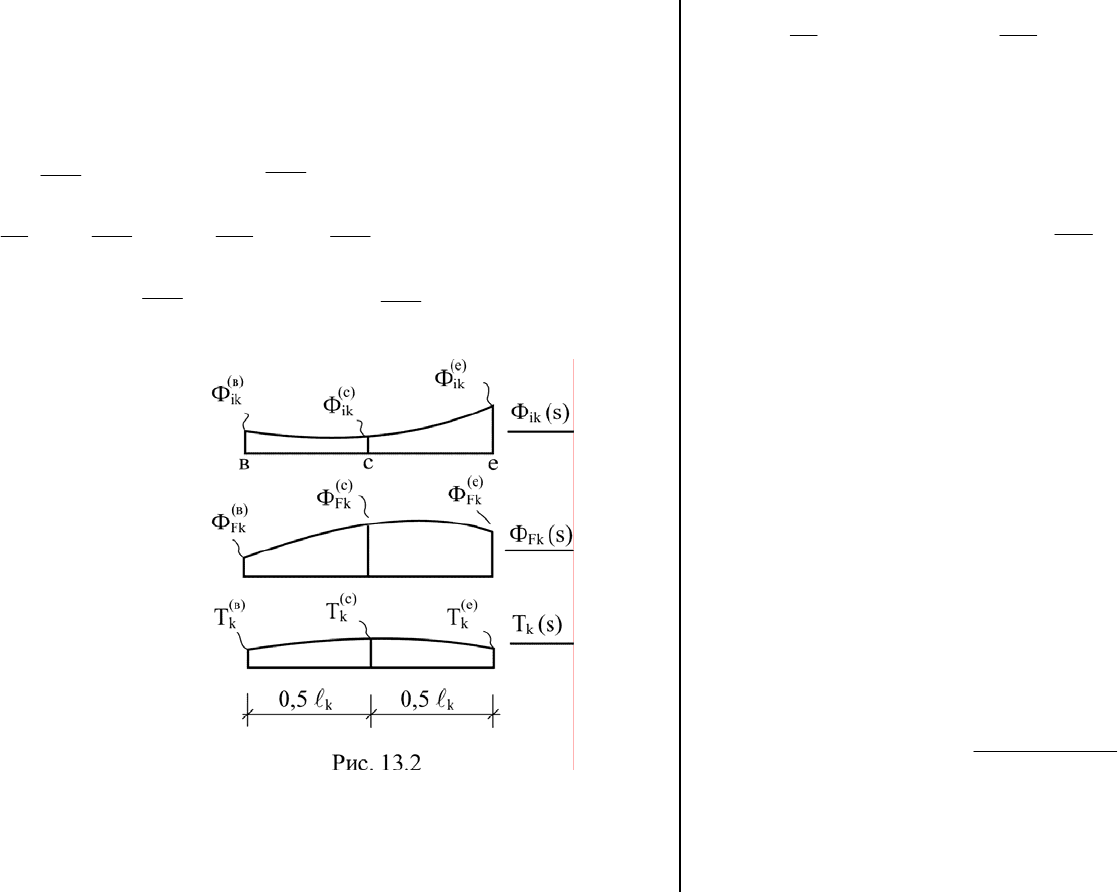
в середине;
)e(
Fk
)e(
ik
, ΦΦ ,
)e(
k
T – в конце интервала
(рис. 13.2); Т
0
– некото-
рое произвольное число.
Матричная трактов-
ка формулы Симпсона
(13.2) позволяет вычис-
лить перемещения от силового воздействия с любой предвари-
тельно заданной точностью.
В частном случае, когда T
k
(s) = const = T
k
, соотношение
(13.2) перепишется:
(
)
.P
4
T6
ds)s()s(
T
1
Fk
ik
FkikFkikFkik
k
k
T
)е()е()с()с()в()в(
0
k
0
Fkik
k
ΦΦ=
=ΦΦ+ΦΦ+ΦΦ=ΦΦ
∫
l
l
(13.3)
Так как
k
)е(
k
)с(
k
)в(
k
TTTT === , то приняв Т
0
= Т
k
, в этом случае
получим:
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
=
100
040
001
T6
P
k
k
k
l
.
Значение определённого интеграла (13.3) будет точным, если
подынтегральная функция будет представлять собой алгебраиче-
ский полином степени не выше третьей (например, когда опреде-
ляются линейные и угловые перемещения отдельных сечений и
узлов стержневых систем от силового воздействия, включающего
сосредоточенные силы и моменты, а также равномерно распреде-
лённые нагрузки). Если же силовое воздействие
содержит рас-
пределённые нагрузки с переменными интенсивностями, то мат-
ричная формулировка формулы Симпсона и в случае, когда T
k
(s)
= const даёт приближённое значение определённого интеграла
(13.3).
13.3. Вычисление интегралов формулы Мора в матричной
форме в случае линейных подынтегральных функций
Ф
ik
(s), Ф
Fk
(s)
В п. 13.2 упоминалось, что численное значение определённо-
го интеграла (13.1) можно получить в матричной форме (13.2)
.P
)s(T
ds)s()s(
Fkk
ik
k
Т
0
k
Fkik
ΦΦ=
ΦΦ
∫
l
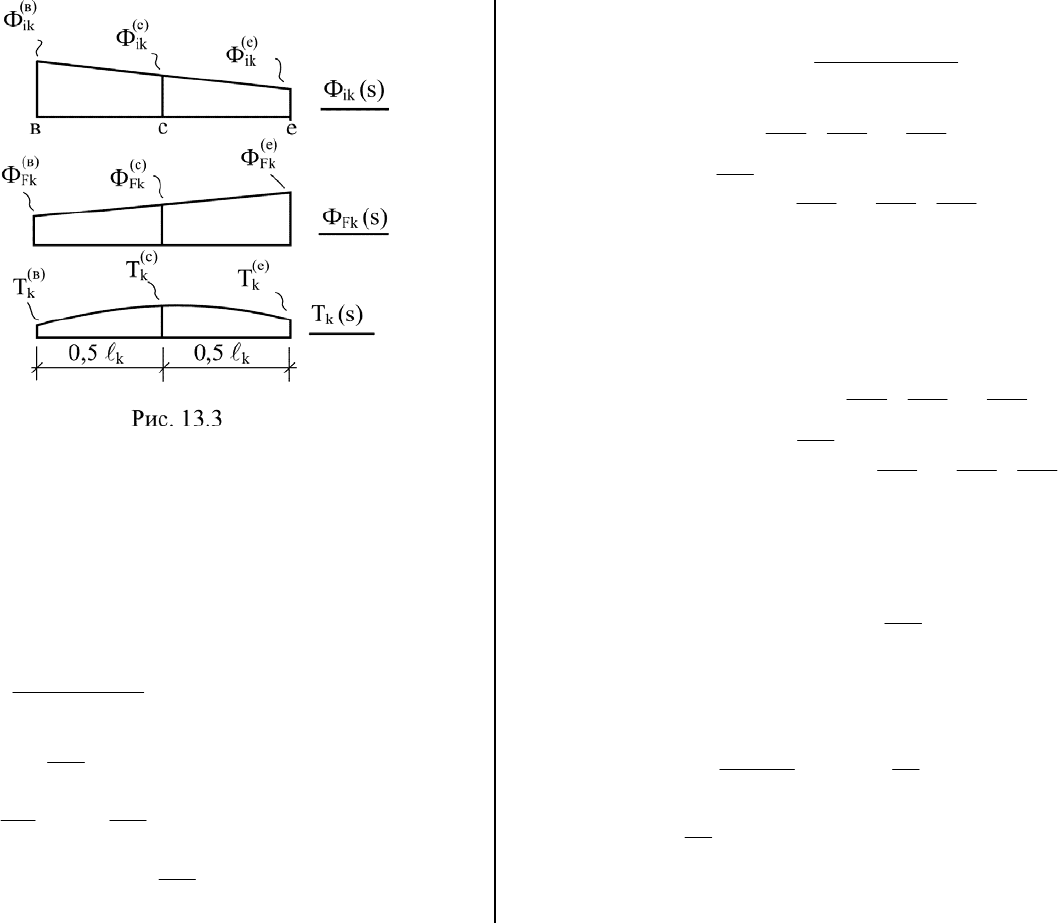
Учитывая линейность функций Ф
ik
(s) и Ф
Fk
(s), их значения
при s = 0,5ℓ
k
)c(
ik
Φ и
)c(
Fk
Φ выразим через
)в(
ik
Φ и
)в(
Fk
Φ при s = 0 и
)е(
ik
Φ и
)е(
Fk
Φ при s = ℓ
k
(рис. 13.3).
9 10
(
)
)е(
ik
)в(
ik
)c(
ik
5,0 Φ+Φ=Φ ;
()
.5,0
)е(
Fk
)в(
Fk
)c(
Fk
Φ+Φ=
=Φ
(13.4)
С учётом зависимо-
стей (13.4) матрицы
выражения (13.2)
T
ik
Φ
и Ф
Fk
перепишутся:
[
]
[]
;
15,00
05,01
)e(
ik
)в(
ik
)e(
ik
)c(
ik
)в(
ik
T
ik
⎥
⎦
⎤
⎢
⎣
⎡
ΦΦ=
=ΦΦΦ=Φ
=
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
Φ
Φ
Φ
=Φ
)e(
Fk
)c(
Fk
)в(
Fk
Fk
⎥
⎦
⎤
⎢
⎣
⎡
Φ
Φ
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
)e(
Fk
)в(
Fk
10
5,05,0
01
. (13.5)
Принимая во внимание соотношения (13.5), определённый
интеграл выражения (13.2) в матричной форме представим сле-
дующим образом:
[]
.
10
5,05,0
01
T
T
00
0
T
T
40
00
T
T
T6
15,00
05,01
)s(T
ds)s()s(
)e(
)в(
)e(
0
)c(
0
)в(
0
0
k
)e()в(
0
k
Fkik
Fk
Fk
k
k
k
ikik
k
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
Φ
Φ
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
⎥
⎦
⎤
⎢
⎣
⎡
ΦΦ=
=
ΦΦ
∫
l
l
Вычислив произведение трёх центральных матриц, получим:
[]
.P
T
T
T
T
T
T
T
T
T
T
T
T
T6
)s(T
ds)s()s(
Fk
ik
Fk
Fk
kkk
kkk
ikik
k
k
T
)e(
)в(
)e(
0
)c(
0
)c(
0
)c(
0
)c(
0
)в(
0
0
k
)e()в(
0
k
Fkik
ΦΦ=
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
Φ
Φ
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎣
⎡
+
+
ΦΦ=
=
ΦΦ
∫
l
l
(13.6)
В формуле (13.6):
[]
.
T
T
T
T
T
T
T
T
T
T
T
T
T6
P
;;
)e(
0
)c(
0
)c(
0
)c(
0
)c(
0
)в(
0
0
k
k
)e(
)в(
)e()в(
T
kkk
kkk
Fk
Fk
Fkikik
ik
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎣
⎡
+
+
=
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
Φ
Φ
=ΦΦΦ=Φ
l
В случае, когда T
k
(s) = const = Т
k
, т.е. когда
)в(
k
T=
)с(
k
T=
=
)е(
k
T, при Т
0
= T
k
матрица Р
k
примет вид:
⎥
⎦
⎤
⎢
⎣
⎡
=
21
12
T6
P
k
k
k
l
.
Наконец, при Ф
ik
(s) = const = Ф
ik
, Ф
Fk
(s) = const = Ф
Fk
,
T
k
= const определённый интеграл соотношения (13.3) вычисляет-
ся наиболее просто.
Fkk
T
Fk
k
k
ik
0
k
Fkik
P
T
ds
T
ik
k
ΦΦ=ΦΦ=
ΦΦ
∫
l
l
, (13.7)
где
k
k
k
T
P
l
= .
В этой ситуации для k-го участка все матрицы формулы (13.7)
формируются из одного элемента.
11 12
13.4. Определение перемещений от силового воздействия
В одиннадцатой лекции (п. 11.3) упоминалось, что влияние
деформаций изгиба, сдвига и растяжения–сжатия на величины
перемещений в сооружениях неодинаково. В рамах и балках пре-
имущественное влияние на величины перемещений оказывают
деформации изгиба, в комбинированных системах, – как дефор-
мации изгиба, так и растяжения–сжатия, в фермах при узловой
передаче нагрузки – только деформации
растяжения–сжатия. В
ряде случаев, например, при расчёте арок и пространственных
стержневых систем определение перемещений производится с
учётом всех видов деформаций. С учётом данного обстоятельства
рассмотрим определение перемещений в сооружениях различно-
го типа от силового воздействия в матричной форме.
1.
Б АЛКИ И РАМЫ. Приняв в соотношении (13.2)
Ф
ik
(s) = M
ik
(s), Ф
Fk
(s) = M
Fk
(s), T
k
(s) = EJ
k
(s), P
k
= B
Mk
, перепишем
формулу Мора для определения перемещений в матричной форме:
FM
T
n
1k
FkMk
T
n
1k
0
k
Fkik
F
MBMMBM
)s(EJ
ds)s(M)s(M
i
M
ik
M
k
===Δ
∑∑
∫
==
l
. (13.8)
В выражении (13.8): n
M
– количество грузовых участков для из-
гибающих моментов; M
i
– матрица изгибающих моментов от
единичных факторов, приложенных в направлении определяемых
перемещений, или матрица изгибающих моментов в единичных
состояниях заданного сооружения; В
М
– матрица внутренней уп-
ругой податливости сооружения, учитывающая деформации из-
гиба его элементов; M
F
– матрица изгибающих моментов от си-
лового воздействия.
Матрицы M
i
, В
М
, M
F
являются блочными, причём количество
блоков в них равно числу грузовых участков для изгибающих
моментов (n = n
M
).
.
M
M
M
M
M,
B
B
B
B
B,
M
M
M
M
M
Fn
Fk
2F
1F
F
Mn
Mk
2M
1M
M
in
ik
2i
1i
i
O
O
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
=
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
=
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
=
M
M
O
O
M
M
(13.9)
Структура блоков, входящих в матрицы (13.9) для любого
грузового участка, определяется видом функций, входящих в по-
дынтегральное
выражение соотношения (13.8).
В общем случае, когда на k-ом грузовом участке с перемен-
ной изгибной жёсткостью поперечного сечения EJ
k
(s) есть рас-
пределённая нагрузка, функция M
Fk
(s) нелинейна. Тогда в соот-
ветствии с выражением (13.2) имеем:
[]
.
00
040
00
EJ6
EJ
1
00
0
EJ
4
0
00
EJ
1
6
B
;
M
M
M
M;MMMM;
M
M
M
M
)e(
k
)c(
k
)в(
k
0
k
)e(
k
)c(
k
)в(
k
k
Mk
)e(
Fk
)c(
Fk
)в(
Fk
Fk
)e(
ik
)c(
ik
)в(
ik
T
ik
)e(
ik
)c(
ik
)в(
ik
ik
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
β
β
β
=
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
=
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
==
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
=
ll
(13.10)
Здесь в, с, е – обозначения сечений соответственно в начале,
середине и в конце k-го участка; EJ
0
– произвольное число;
)в(
k
β ,
)c(
k
β ,
)e(
k
β – относительные изгибные податливости сечений в, с, е
)в(
k
0
)в(
k
EJ
EJ
=β
;
)c(
k
0
)c(
k
EJ
EJ
=β
;
)e(
k
0
)e(
k
EJ
EJ
=β
.
13 14
Если EJ
k
(s) = const = EJ
k
, то приняв EJ
0
=
)в(
k
EJ =
)c(
k
EJ =
)e(
k
EJ = EJ
k
, получим
)в(
k
β =
)c(
k
β =
)e(
k
β = 1 и тогда матрица (13.10)
внутренней упругой податливости для k-го грузового участка
преобразуется следующим образом:
.
100
040
001
EJ6
B
k
k
Mk
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
=
l
(13.11)
При отсутствии на грузовом участке распределённой нагруз-
ки функция M
Fk
(s) будет линейной. Функция M
ik
(s) при опреде-
лении перемещений отдельных сечений и узлов стержневых сис-
тем также линейна. В этой ситуации, учитывая соотношение
(13.6), получим:
[]
;
M
M
M;MMM;
M
M
M
)e(
)в(
Fk
)e()в(
T
)e(
)в(
ik
Fk
Fk
ikik
ik
ik
ik
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
==
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
=
.
EJ6
EJ
EJ
EJ
EJ
EJ
EJ
EJ
EJ
EJ
EJ
EJ
EJ
EJ6
B
)e(
k
)c(
k
)c(
k
)c(
k
)c(
k
)в(
k
0
k
)e(
k
0
)c(
k
0
)c(
k
0
)c(
k
0
)c(
k
0
)в(
k
0
0
k
Mk
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
β+ββ
ββ+β
=
=
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎣
⎡
+
+
=
l
l
(13.12)
При EJ
k
(s) = const = EJ
k
и EJ
0
= EJ
k
матрица (13.12) перепи-
шется
.
21
12
EJ6
B
k
k
Mk
⎥
⎦
⎤
⎢
⎣
⎡
=
l
(13.13)
Число строк в блочных матрицах (13.9) M
i
, M
F
, B
M
равно
суммарному числу сечений, в которых фиксируются изгибающие
моменты для вычисления требуемой матрицы перемещений. В
матрице M
i
число столбцов равно числу определяемых переме-
щений, в матрице M
F
– числу внешних воздействий на сооруже-
ние, в матрице B
M
– числу строк.
2. Ф
ЕРМЫ. В фермах при узловой передаче нагрузки
усилия в сечениях стержней постоянны. Довольно часто и жёст-
кости поперечных сечений стержней на растяжение–сжатие так-
же постоянны. В этом случае при Ф
ik
= N
ik
= const, Ф
Fk
= N
Fk
= const, T
k
= EA
k
= const соотношение (13.7) для k-го стержня
примет вид:
FkNk
T
k
Fkkik
0
k
Fkik
NBN
EA
NN
ds
EA
NN
ik
k
==
∫
l
l
,
где
k
k
Nk
EA
B
l
= [1].
Распространяя последнее соотношение на всю форму, имеющую
n стержней, получим:
FN
T
n
1k
k
Fkkik
F
NBN
EA
NN
i
==Δ
∑
=
l
. (13.14)
В формуле (13.14): N
i
– матрица продольных усилий в стержнях
фермы от единичных факторов, приложенных в направлении оп-
ределяемых перемещений; N
F
– матрица продольных усилий в
стержнях фермы от заданного силового воздействия; B
N
– матри-
ца внутренней упругой податливости фермы, учитывающая де-
формации растяжения–сжатия её стержней, т.е.
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
=
n
n
k
k
2
2
1
1
N
EA
EA
EA
EA
B
O
O
l
O
l
O
l
l
. (13.15)
15 16
Число строк матриц N
i
, N
F
и B
N
равно числу стержней фер-
мы. В матрице N
i
число столбцов равно числу искомых переме-
щений, в матрице N
F
– числу внешних комбинаций узловых на-
грузок, в диагональной матрице B
N
– числу строк.
3.
К ОМБИНИРОВАННЫЕ СИСТЕМЫ. В комбиниро-
ванных системах, в которых, как правило, при определении пе-
ремещений пренебрегают деформациями сдвига, формула Мора
имеет вид:
∑
∫
∑
∫
==
+=Δ
N
k
M
k
n
1k
0
k
Fkik
n
1k
0
k
Fkik
jF
)s(EA
ds)s(N)s(N
)s(EJ
ds)s(M)s(M
ll
.
Последнее выражение в этой формуле предусматривает учёт
деформаций растяжения–сжатия в незагруженных элементах,
имеющих по концам цилиндрические шарниры и преимущест-
венно постоянную жёсткость поперечного сечения на растяже-
ние–сжатие. Таким образом, эти элементы комбинированных
систем работают как стержни ферм при узловой передаче нагруз-
ки. С учётом этого обстоятельства формулу Мора
для комбини-
рованных систем можно представить так:
F
T
n
1k
k
kFkik
n
1k
0
k
Fkik
F
BLL
EA
NN
)s(EJ
ds)s(M)s(M
i
N
M
k
=+=Δ
∑∑
∫
==
l
l
. (13.16)
Здесь n
N
– число стержней, в которых необходимо учесть дефор-
мации растяжения–сжатия; L
i
– матрица внутренних усилий (из-
гибающих моментов и продольных сил) от единичных факторов,
приложенных в направлении определяемых перемещений; L
F
–
матрица внутренних усилий от внешних силовых воздействий; В –
матрица упругой внутренней податливости комбинированной
системы, учитывающей как деформации изгиба, так и деформа-
ции растяжения–сжатия. Упомянутые матрицы имеют блочную
структуру:
⎥
⎦
⎤
⎢
⎣
⎡
=
⎥
⎦
⎤
⎢
⎣
⎡
=
⎥
⎦
⎤
⎢
⎣
⎡
=
N
M
F
F
F
i
i
i
B0
0B
B;
N
M
L;
N
M
L . (13.17)
Формирование блоков матриц (13.17) производится: M
i
, M
F
,
B
M
– по правилам, изложенным выше для рам и балок; N
i
, N
F
, B
N
– по соответствующим правилам для ферм.
4. П
ЛОСКИЕ СТЕРЖНЕВЫЕ СИСТЕМЫ. Для этих
систем с учётом влияния всех видов деформаций на перемещения
формула Мора в матричной форме запишется следующим образом:
.BLL
)s(EA
ds)s(M)s(N
)s(GA
ds)s(M)s(Q
k
)s(EJ
ds)s(M)s(M
F
T
i
n
1k
0
k
Fkik
n
1k
0
k
Fkik
k
n
1k
0
k
Fkik
F
N
k
Q
k
M
k
=+
++=Δ
∑
∫
∑
∫
∑
∫
=
=
τ
=
l
ll
(13.18)
В соотношении (13.18):
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
=
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
=
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
=
N
Q
M
F
F
F
F
i
i
i
i
B00
0B0
00B
B;
N
Q
M
L;
N
Q
M
L.
В матрице В блок В
Q
учитывает деформации сдвига элемен-
тов сооружения.
Порядок формирования блоков M
i
, N
i
, M
F
, N
F
, B
M
и B
N
изло-
жен выше. Вид блоков Q
i
, Q
F
, B
Q
зависит от характеристик грузо-
вых участков для поперечных сил: есть ли распределённая на-
грузка на этих участках, каков закон изменения жёсткости попе-
речного сечения на сдвиг GA
k
(s)? В частности, при GA
k
(s) =
= const = GA
k
и равномерно распределённой нагрузки для k-го
грузового участка имеем:
⎥
⎦
⎤
⎢
⎣
⎡
=
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
=
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
=
τ
21
12
GA
k
B;
Q
Q
Q;
Q
Q
Q
k
kk
Qk
)e(
)в(
Fk
)e(
)в(
ik
Fk
Fk
ik
ik
l
.
Если распределённая нагрузка на рассматриваемом грузовом
участке отсутствует, то
ikikik
QQQ
)e()в(
== ,
FkFkFik
QQQ
)e()в(
== , и
при GA
k
(s) = const = GA
k
матрицы Q
ik
, Q
Fk
, B
Qk
будут состоять из
одного элемента, причём
k
kk
Qk
GA
k
B
τ
=
l
[1] .
17 18
5. П РОСТРАНСТВЕННЫЕ СТЕРЖНЕВЫЕ СИСТЕ-
МЫ. В общей формуле Мора, записанной в матричной форме
для определения перемещений в этих системах
F
T
F
BLL
i
=Δ ,
элементами матриц L
i
и L
F
являются изгибающие моменты и по-
перечные силы, действующие в главных плоскостях инерции по-
перечных сечений, продольные силы и крутящие моменты. Мат-
рица внутренней податливости сооружения В в этом случае
включает в себя блоки, учитывающие все виды деформаций (из-
гиба и сдвига в двух взаимно перпендикулярных плоскостях, рас-
тяжения–сжатия и
кручения).
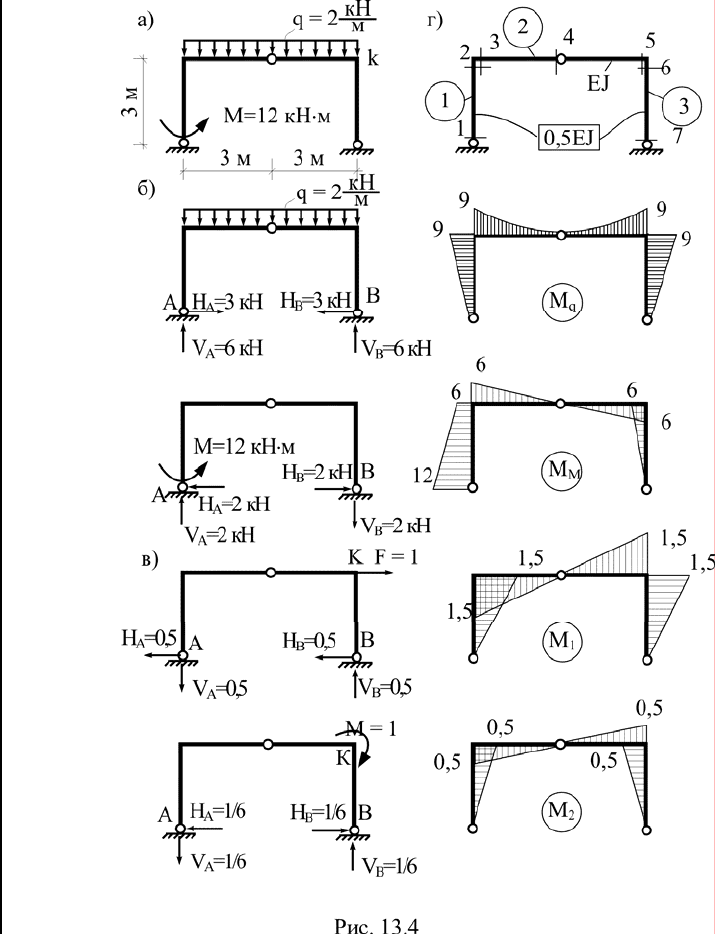
П
РИМЕР 13.4.1. В трёхшарнирной раме, показанной на
рис. 13.4,а, изгибная жёсткость поперечного сечения ригеля зада-
на и равна EJ, стоек – 0,5EJ. Требуется определить горизонталь-
ное перемещение и поворот узла К отдельно от равномерно рас-
пределённой нагрузки q = 2 кН/м и от сосредоточенного момента
М = 12 кН
⋅м, т.е. требуется вычислить элементы матрицы пере-
мещений
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
θθ
ΔΔ
=Δ
)M()q(
)M(
k
)q(
F
kk
xkx
.
Искомую матрицу перемещений определим по формуле
(13.8)
FM
T
iF
MBM=Δ .
1. Построение эпюр изгибающих моментов M
q
и M
М
отдель-
но от равномерно распределённой нагрузки и от сосредоточенно-
го момента (рис. 13.4,б).
2. Построение эпюр изгибающих моментов M
1
и M
2
от еди-
ничных силовых факторов F = 1 и М = 1, приложенных в направ-
лении определяемых перемещений (рис. 13.4,в).
3. Нумерация грузовых участков для изгибающих моментов
и сечений, в которых изгибающие моменты будем фиксировать