Коновалов Б.И., Лебедев Ю.М. Теория автоматического управления
Подождите немного. Документ загружается.

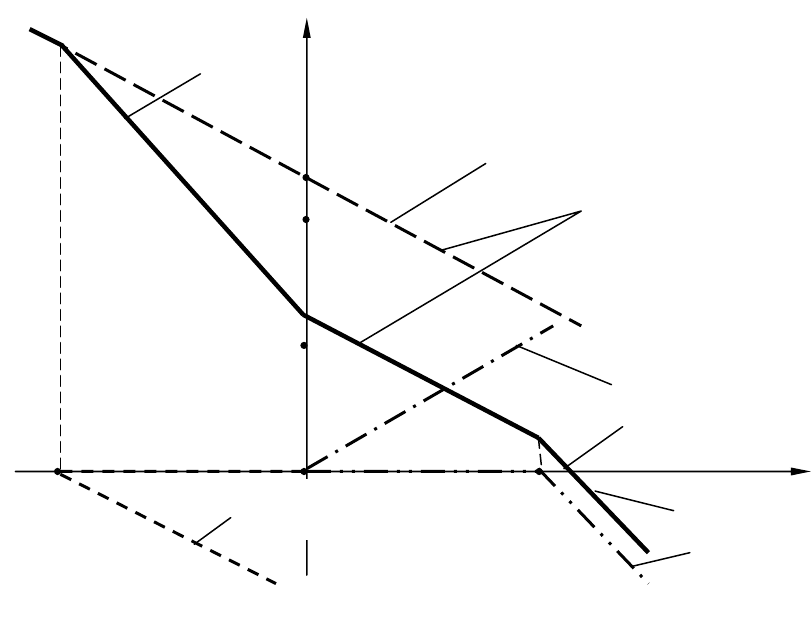
Просуммировав графически ЛАЧХ всех звеньев, получим харак-
теристику 5, являющуюся асимптотической ЛАЧХ разомкнутой це-
пи САУ.
Из этого примера видно, что суммарную характеристику легко
можно построить, не изображая характеристик отдельных звеньев.
Поэтому при построении ЛАЧХ разомкнутых САУ вначале проводят
первую асимптоту через точку с координатами
,1
=
ω
p
lg20)( KG =
ω
с наклоном
(
)
дБ/дек20
−
⋅
n , где n равно разности
между числами идеальных интегрирующих и дифференцирующих
звеньев. После каждой сопрягающей частоты наклон ЛАЧХ изменя-
ют, причем изменение наклона определяется типом звена, давшим
сопрягающую частоту. Причем если у колебательного звена
ξ< 0,4,
на соответствующей частоте необходимо изобразить “горб” в соот-
ветствии с величиной
ξ.
Возможно и решение обратной задачи – восстановление переда-
точной функции по ее асимптотической ЛАЧХ.
G(ω), дБ
- 40 дБ/дек
0
G 1
- 20 дБ/дек
40
20
3
5
0,1 0 1 lg ω
2 - 40 дБ/дек
4
Рис.4.15. Построение асимптотической ЛАЧХ разомкнутой цепи
2
lg
ω
3
lg
ω
1
lg
ω
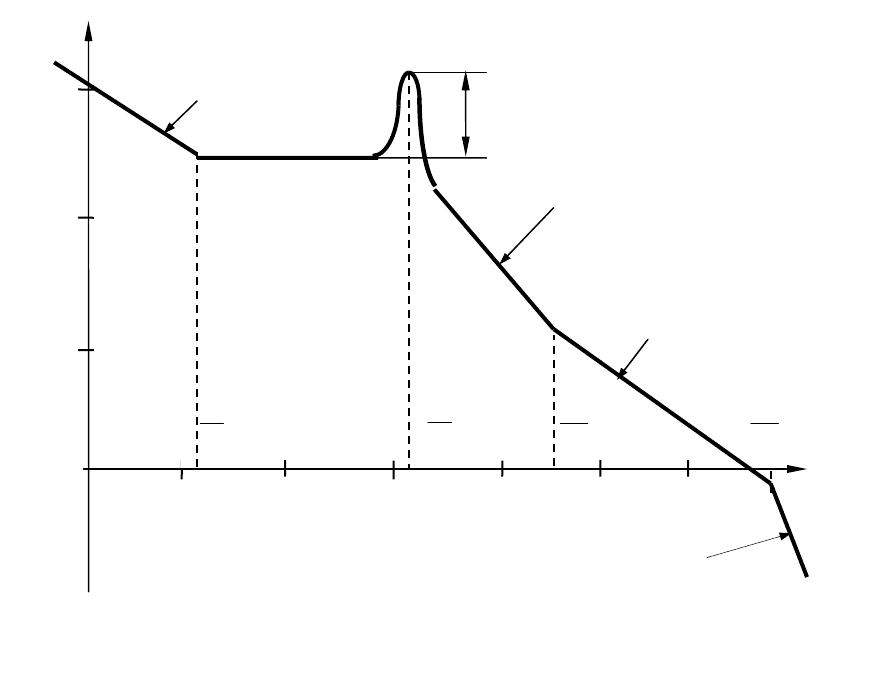
Пример 4.7.
По заданной на рис.4.16 асимптотической ЛАЧХ одноконтурной
разомкнутой системы требуется восстановить ее передаточную
функцию.
Величина наклона первой асимптоты (по мере роста частоты)
указывает на присутствие в структуре системы интегрирующего зве-
на.
Для первой асимптоты поэтому справедливо уравнение (см. ха-
рактеристики интегрирующего звена):
ω
−
=
ω
lg20lg20)(
p
KG
.
Определить параметр
p
K можно, отсчитав с графика координаты
любой точки этой асимптоты. Например
)1,0lg(20lg2060
p
−= K , 20lg2060
p
+
=
K , 40lg20
p
=K ,
100
p
=
K
.
G(ω), дБ
60
0
G −20 дБ/дек
15 дБ
−40 дБ/дек
40
−20 дБ/дек
20
lg
ω
−1 −0,4 0 0,6 1,25 2 2,25
−40 дБ/дек
Рис.4.16. Восстановление передаточной функции по
асимптотической ЛАЧХ
1
1
τ
2
1
τ
1
1
T
2
1
T

После первой по величине сопрягающей частоты наклон ЛАЧХ
изменился на плюс 20 дБ/дек. Такой наклон имеет ЛАЧХ форсирую-
щего звена. Следовательно, в структуре системы есть форсирующее
звено. Анализируя изменение наклонов асимптот ЛАЧХ можно за-
ключить, что помимо упомянутых типовых звеньев в систему вклю-
чены колебательное звено, еще одно форсирующее и инерционное
звенья.
В общем виде передаточная функция будет следующей:
.
)1)(12(
)1)(1(100
)(
21
22
1
11
+++
+
+
=
pTpTpTp
pp
pW
ξ
τ
τ
По частотам сопряжения рассчитаем соответствующие постоян-
ные времени:
дек 4,0
1
lg
1
−=
τ
;
14,0
c1
c 4,010
−
−
==ω ; 5,2
1
=
τ
с;
дек 25,1
1
lg
2
=
τ
;
125,1
c1
c 8,1710
−
==ω ; 056,0
2
=
τ
с;
дек 6,0
1
lg
1
=
T
;
16,0
c3
c 410
−
==ω ;
25,0
1
=T
с;
дек 5,2
1
lg
2
=
T
;
15,2
c4
c 2,31610
−
==ω ; 0032,0
2
=T с.
По всплеску ЛАЧХ на частоте сопряжения колебательного звена
определим коэффициент демпфирования:
;
2
1
lg2015
ξ
= ;
20
15
2lg −=ξ .09,0=
ξ
Окончательный ответ:
.
)10032,0)(1045,00625,0(
)1056,0)(15,2(100
)(
2
+++
+
+
=
pppp
pp
pW
Следует отметить, что восстановление передаточной функции
САУ по асимптотической ЛАЧХ возможно в том случае, если систе-
ма содержит только минимально-фазовые звенья. Если же в ней
имеются особые звенья (неминимально фазовые, иррациональные,
звенья чистого запаздывания), эта задача не имеет однозначного ре-
шения, т.к. асимптотические ЛАЧХ этих звеньев такие же, как и у
минимально фазовых звеньев (см. разделы 3.3).
5. ОЦЕНКА КАЧЕСТВА УПРАВЛЕНИЯ.
5.1. Показатели качества управления в статическом
режиме работы САУ. Статические и астатические
системы
Как всякая динамическая система, САУ может находиться в од-
ном из двух режимов - стационарном (установившемся) и переход-
ном. Стационарный режим может быть двух типов: статический и
динамический. Ограничимся здесь рассмотрением лишь статического
режима.
В статическом режиме, при котором все внешние воздействия и
параметры системы не меняются, качество управления характеризу-
ется точностью.
Рассмотрим САУ с двумя воздействиями: задающим
)(1)(
max
tgtg ⋅= и возмущающим )(1)(
max
tftf
⋅
=
, где
maxmax
, fg
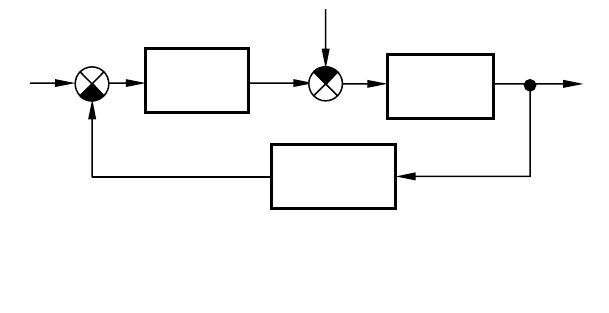
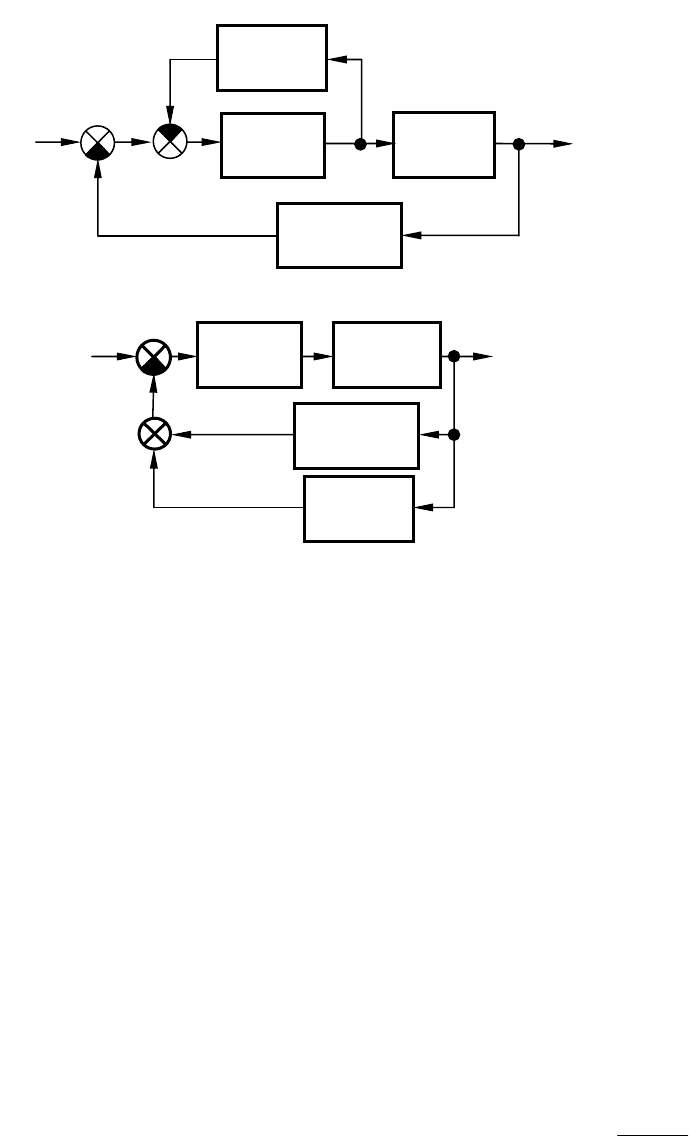
– амплитуды этих воздействий. Структурная схема такой системы
приведена на рис.5.1.
В соответствии с принципом суперпозиции, линейная непрерыв-
ная САУ в операторной форме описывается уравнением динамики:
)()()()()(
зfзg
pWpFpWpGpY
⋅
−
⋅=
, (5.1)
f
g y
Рис.5.1. Структурная схема одноконтурной
САУ
W
1
(p)
W
ОС
(p)
W
2
(p)
где
{} {}
p
f
tfpF
p
g
tgpG
maxmax
)()( ,)()( ==== LL
– изображения
задающего и возмущающего воздействий;
)()()(1
)(
)( ,
)()()(1
)()(
)(
oc21
2
зf
oc21
21
зg
pWpWpW
pW
pW
pWpWpW
pWpW
pW
+
=
+
=
– передаточные функции замкнутой системы по каждому из воздей-
ствий.
Для анализа поведения САУ в статическом режиме (при
∞=
t
), в
соответствии с теоремой операционного исчисления о конечном зна-
чении оригинала [1 – 3]
)(lim)(lim
0
ppYty
pt →∞→
=
, в уравнении (5.1) в
передаточных функциях и изображениях нужно принять
0=p
. При
этом уравнение динамики превратится в уравнение статики вида
)0()0(),(
зfзg
WfWgfgy
⋅
−⋅= , (5.2)
где
f
g , – текущие значения задающего и возмущающего воздейст-
вий.
Пусть система, изображенная на рис 5.1, не содержит интегри-
рующих звеньев, тогда
p
pf
зg
p
oc
p
зg
1
)0( ,
1
)0(
K
k
W
K
k
K
W
+
=
+
=
, где
p
K –
коэффициент передачи разомкнутой цепи,
oc
k – коэффициент пере-
дачи звена обратной связи,
pf
k – коэффициент передачи разомкну-
той САУ по возмущающему воздействию (звена
)(
2
pW , установлен-
ного после точки приложения этого воздействия). Тогда уравнение
(5.2) можно представить в виде:
p
pf
p
oc
p
11
),(
K
k
f
K
k
K
gfgy
+
⋅−
+
⋅=
. (5.3)
По уравнению (5.3) можно построить статические характеристи-
ки САУ. В зависимости от характера изменения воздействий
g
и
f
различают регулировочные и внешние статические характеристики.

Последовательная коррекция, особенно в варианте, представлен-
ном на рис. 6.1, а, является наиболее распространенной. Это опреде-
ляется простотой ее реализации и наглядностью при определении пе-
редаточной функции корректирующего устройства.
Корректирующие устройства, включаемые по схеме рис.6.1, а,
называют регуляторами.
На практике применяются следующие регуляторы:
6.1.1. Пропорциональный (П ) регулятор. Его
передаточная функция имеет вид
ПП
)( kpW
=
,
т.е. П-регулятор представляет собой пропорциональное звено и слу-
жит для изменения коэффициента передачи и обеспечения требуе-
мой статической точности САУ.
6.1.2. Интегральный (И ) регулятор. Он является
интегрирующим звеном с передаточной функцией
p
k
pW
И
И
)( =
и позволяет превратить статическую САУ в астатическую.
6.1.3. Фильтр (Ф ). Представляет собой в общем случае
инерционное форсирующее звено с единичным коэффициентом пе-
редачи и передаточной функцией
1
1
)(
Ф
Ф
Ф
+
+
=
pT
p
pW
τ
.
В ряде случаев постоянная времени
Ф
τ
может равняться нулю.
Фильтр служит для компенсации некоторых постоянных времени
нескорректированной САУ.
6.1.4. Пропорционально- дифференцирующий
( ПД) регулятор. Образуется в результате параллельного со-
единения пропорционального
пп
)( kpW
=
и дифференцирующего
pkpW
дд
)( = звеньев, т.е. его передаточная функция определится
выражением
()
11)()()(
ПДПД
п
д
пдпдпПД
+=
+=+=+= pkp
k
k
kpkkpWpWpW
τ
.
Таким образом, ПД-регулятор является форсирующим звеном и
служит для повышения устойчивости САУ или компенсирует одну
из ее постоянных времени.
6.1.5. Пропорционально- интегральный (ПИ)
регулятор. Образуется в результате параллельного соединения
пропорционального
пп
)( kpW
=
и интегрирующего
p
k
pW
и
и
)( =
звеньев, его передаточная функция определится соотношением
()
11)()()(
ПИПИ
и
п
и
и
пипПИ
+=
+=+=+= pTkp
k
k
k
p
k
kpWpWpW .
ПИ-регулятор является изодромным звеном, позволяет повысить
порядок астатизма САУ одновременно с повышением ее устой-
чивости (см. раздел 5.1).
6.1.6. Пропорционально- интегродифферен-
цирующий (ПИД) регулятор. Образуется в результате
параллельного соединения пропорционального
пп
)( kpW = , диффе-
ренцирующего
pkpW
дд
)( = и интегрирующего
p
k
pW
и
и
)( = звень-
ев, его передаточная функция выражается формулой
()( )
,
11
1
)()()()(
21ПИД
и
п
2
и
д
и
ип
2
д
и
дпидпПИД
p
ppk
p
p
k
k
p
k
k
k
p
kpkpk
p
k
pkkpWpWpWpW
+τ+τ
=
++
=
++
=
=++=++=
где
иПИД
kk = ,
и
д
2
и
2
п
и
п
2,1
4
2 k
k
k
k
k
k
−±=
τ
.
ПИД-регулятор также способствует увеличению порядка аста-
тизма САУ с одновременным повышением ее устойчивости, при
этом может произойти компенсация одной из постоянных времени
нескорректированной САУ.
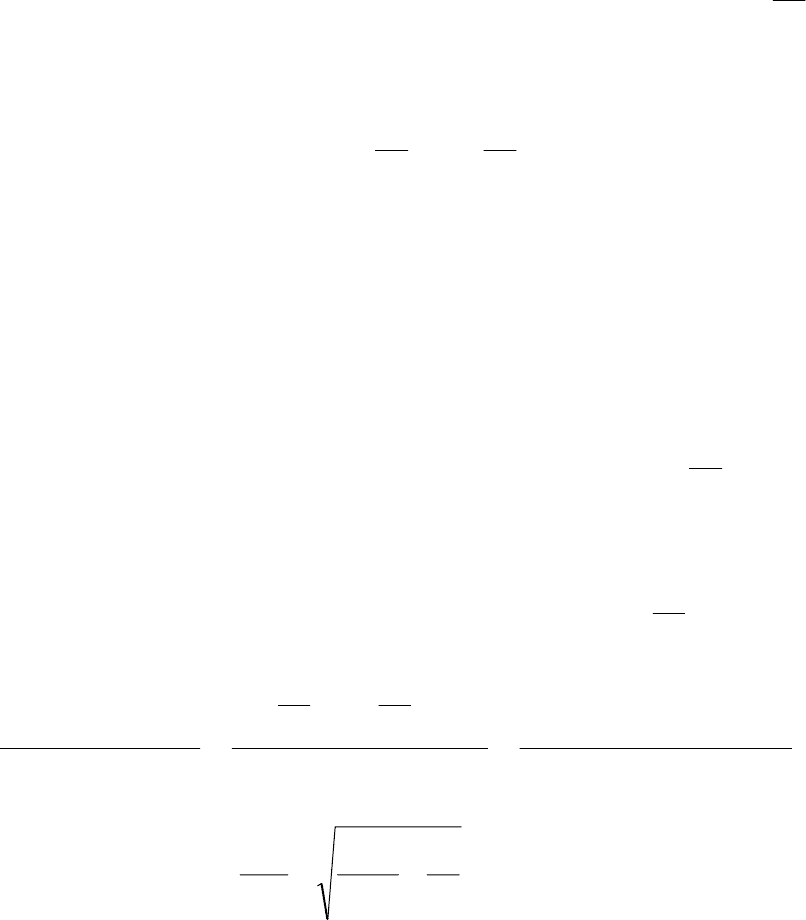
Параллельная коррекция осуществляется следующим образом:
либо одно из звеньев нескорректированной САУ охватывается мест-
ной обратной связью (рис. 6.2, а), либо корректирующее устройство
подключается параллельно главной обратной связи нескорректиро-
ванной САУ (рис. 6.2, б).
Корректирующие обратные связи могут быть положительными и
отрицательными, жесткими и гибкими. Жесткие обратные связи
действуют как в статическом, так и в динамическом режимах работы
САУ. Они могут осуществляться с помощью пропорционального,
инерционного, форсирующего звеньев и их последовательного со-
единения. Гибкие обратные связи действуют только в динамиче-
ском режиме работы и реализуются посредством включения идеаль-
ных или реальных дифференцирующих звеньев.
Благодаря местным обратным связям изменяются параметры
звеньев, входящих в структуру САУ, а иногда может измениться и
тип звена, охваченного этой связью. Этот факт иллюстрируется при-
веденными ниже примерами.
Пример 6.1.
Инерционное звено с передаточной функцией
1
)(
+
=
Tp
k
pW
ох-
вачено жесткой отрицательной обратной связью, причем
ococ
)( kpW = . Определить, как изменятся параметры получившегося
эквивалентного звена.
Рис.6.2. Варианты параллельной коррекции
g y
а
W
1
(p)
W
ОС
(p)
W
2
(p)
W
к
(
(p)
g y
б
W
1
(p)
W
ОС
(p)
W
2
(p)
W
к
(
(p)
Определим передаточную функцию эквивалентного звена:
,
1
,
1
,
1
1
1
1
1
1
1
1
1
)()(1
)(
)(
oc
экв
oc
экв
экв
экв
oc
oc
oc
oc
oc
экв
kk
T
T
kk
k
k
pT
k
p
kk
T
k
kk
kkTp
k
k
Tp
k
Tp
k
pWpW
pW
pW
+
=
+
=
+
=
+
+
⋅
+
=
=
++
=
⋅
+
+
+
=
+
=
т.е. звено осталось инерционным, а его коэффициент передачи и по-
стоянная времени уменьшились в
oc
1 kk
+
раз. Следовательно время
переходного процесса и установившееся значение выходной величи-
ны также уменьшатся в
oc
1 kk
+
раз.
Пример 6.2.
Инерционное звено с передаточной функцией
1
)(
+
=
Tp
k
pW ох-
вачено жесткой положительной обратной связью, причем
ococ
)( kpW =
. Определить, как изменятся передаточная функция и
параметры получившегося эквивалентного звена.
Передаточная функция эквивалентного звена
.
1
1
1
1
)()(1
)(
)(
oc
oc
oc
экв
kkTp
k
k
Tp
k
Tp
k
pWpW
pW
pW
−+
=
⋅
+
−
+
=
−
=
Тип звена и его передаточная функция зависят от величины
oc
k .
При
1
oc
<kk звено будет инерционным, а его коэффициент передачи
oc
экв
1 kk
k
k
−
=
и постоянная времени
oc
экв
1 kk
T
T
−
=
увеличатся в
oc
1 kk− раз. При 1
oc
=
kk звено станет интегрирующим,
p
k
pW
и
экв
)( = ,
T
k
k =
и
. При 1
oc
>kk звено будет неустойчивым не-
минимально-фазовым, его передаточная функция
1
)(
экв
экв
экв
−
=
pT
k
pW
, при этом
1
,
1
oc
экв
oc
экв
−
=
−
=
kk
T
T
kk
k
k
.
Пример 6.3.
Инерционное звено с передаточной функцией
1
)(
+
=
Tp
k
pW
ох-
вачено жесткой отрицательной инерционной обратной связью, т.е.
1
)(
oc
oc
oc
+
=
pT
k
pW
. Определить, как изменятся передаточная функ-
ция получившегося эквивалентного звена.
Передаточная функция эквивалентного звена
,
12
1
11
1
1
1)(
11
1
1
)()(1
)(
)(
экв
22
экв
экв
oc
oc
2
oc
oc
oc
ococ
2
oc
oc
oc
oc
экв
+ξ+
=
=
+
+
+
+
+
⋅
+
=
++++
=
=
+
⋅
+
+
+
=
+
=
pTpT
k
p
kk
TT
p
kk
TT
kk
k
kkpTTpTT
k
pT
k
Tp
k
Tp
k
pWpW
pW
pW
где
oc
ococ
oc
oc
экв
12
,
1 kk
TTTT
kk
TT
T
+
+
=ξ
+
=
. При 1<
ξ
звено будет
колебательным, а при
1≥
ξ
– апериодическим второго порядка.
При комбинированной коррекции используется как последова-
тельная, так и параллельная коррекция.
Основной принцип автоматического управления состоит в фор-
мировании управляющего сигнала по величине рассогласования
)()()(
ос
txtgt −=
ε
. Если производится коррекция по внешнему
воздействию, то реализуется комбинированное управление – по
рассогласованию и по внешнему воздействию.
Путем введения коррекции по внешнему воздействию при опре-
деленных условиях удается сводить величину установившейся ошиб-
ки к нулю при любой форме этого внешнего воздействия. Это свой-
ство называется инвариантностью системы по отношению к дан-
ному внешнему воздействию.
Коррекция может производиться по отношению как к задающе-
му, так и к возмущающему воздействию. Рассмотрим вариант введе-
ния корректирующего устройства по возмущающему воздействию.