Klyatskin V.I. Lectures on Dynamics of Stochastic Systems
Подождите немного. Документ загружается.

216 Lectures on Dynamics of Stochastic Systems
Averaging then Eq. (8.70) over an ensemble of realizations of random function z(t),
we obtain the equation
G(t;t
0
)
= g(t;t
0
) + 3
t
Z
t
0
dτ g(t;τ )
z(τ )G(τ ;t
0
)
. (8.71)
Taking into account equality
δ
δz(t)
G(t;t
0
) = g(t;t)3G(t;t
0
) (8.72)
following from Eq. (8.70), we can rewrite the correlator in the right-hand side of
Eq. (8.71) in the form
z(τ )G(τ ;t
0
)
= D
δ
δz(τ )
G(τ ;t
0
)
= 3Dg(τ ;τ )
G(τ ;t
0
)
.
As a consequence, Eq. (8.71) grades into the closed integral equation for average
Green’s function
G(t;t
0
)
= g(t;t
0
) + 3
2
D
t
Z
t
0
dτ g(t;τ )g(τ ;τ )
G(τ ;t
0
)
, (8.73)
which has the form of the Dyson equation (in the terminology of the quantum field
theory)
G(t;t
0
)
= g(t;t
0
) + 3
t
Z
t
0
dτ g(t;τ )
τ
Z
t
0
dτ
0
Q(τ ;τ
0
)
G(τ
0
;t
0
)
,
or
G(t;t
0
)
= g(t;t
0
) + 3
t
Z
t
0
dτ
h
G(t;τ )
i
τ
Z
t
0
dτ
0
Q(τ ;τ
0
)g(τ
0
;t
0
),
(8.74)
with the mass function
Q(τ ;τ
0
) = 3
2
Dg(τ ;τ )δ(τ − τ
0
).
Derive now the equation for the correlation function
0(t, t
0
;t
1
, t
0
1
) =
G(t;t
0
)G
∗
(t
1
;t
0
1
)
(t > t
0
, t
1
> t
0
1
),
Approximations of Gaussian Random Field Delta-Correlated in Time 217
where G
∗
(t;t
0
) is complex conjugated Green’s function. With this goal in view, we
multiply Eq. (8.70) by G
∗
(t
1
;t
0
1
) and average the result over an ensemble of real-
izations of random function z(t). The result is the equation that can be symbolically
represented as
0 = g
G
∗
+ 3g
zGG
∗
. (8.75)
Taking into account the Dyson equation (8.74)
h
G
i
= {1 +
h
G
i
Q}g,
we apply operator {1 +
h
G
i
Q} to Eq. (8.75). As a result, we obtain the symbolic-form
equation
0 =
h
G
i
G
∗
+
h
G
i
3
zGG
∗
− Q0
,
which can be represented in common variables as
0(t, t
0
;t
1
, t
0
1
) =
G(t;t
0
)
G
∗
(t
1
;t
0
1
)
+ 3D
t
Z
0
dτ
h
G(t;τ )
i
δG(τ ;t
0
)
δz(τ )
G
∗
(t
1
;t
0
1
) + 2G(τ ;t
0
)
δG
∗
(t
1
;t
0
1
)
δz(τ )
− 3
2
D
t
Z
0
dτ
h
G(t;τ )
i
g(τ ;τ )0(τ, t
0
;t
1
, t
0
1
). (8.76)
Deriving Eq. (8.76), we used additionally Eq. (5.30), page 130, for splitting correla-
tions between the Gaussian delta-correlated process z(t) and functionals of this process
z(t
0
)R[t;z(τ )]
>=
D
δ
δz(t)
R[t;z(τ )]
(t
0
= t, τ < t),
2D
δ
δz(t
0
)
R[t;z(τ )]
(t
0
< t, τ < t).
Taking into account Eq. (8.72) and equality
δ
δz(τ )
G
∗
(t
1
;t
0
1
) = 3G
∗
(t
1
;τ )G
∗
(τ ;t
0
1
),
following from Eq. (8.70) we can rewrite Eq. (8.76) as
0(t, t
0
;t
1
, t
0
1
) =
G(t;t
0
)
G
∗
(t
1
;t
0
1
)
+ 2|3|
2
D
t
Z
0
dτ
h
G(t;τ )
i
G
∗
(t
1
;τ )G(τ ;t
0
)G
∗
(τ ;t
0
1
)
. (8.77)

218 Lectures on Dynamics of Stochastic Systems
Now, we take into account the fact that function G
∗
(t
1
;τ ) functionally depends on
random process z(eτ ) for eτ ≥ τ while functions G(τ ;t
0
) and G
∗
(τ ;t
0
1
) depend on it for
eτ ≤ τ . Consequently, these functions are statistically independent in the case of the
delta-correlated process z(eτ ), and we can rewrite Eq. (8.77) in the form of the closed
equation (t
1
≥ t)
0(t, t
0
;t
1
, t
0
1
) =
G(t;t
0
)
G
∗
(t
1
;t
0
1
)
+ 2|3|
2
D
t
Z
0
dτ
h
G(t;τ )
i
G
∗
(t
1
;τ )
0(τ ;t
0
;τ ;t
0
1
). (8.78)
8.6 Diffusion Approximation
Applicability of the approximation of the delta-correlated random field f (x, t) (i.e.,
applicability of the Fokker–Planck equation) is restricted by the smallness of the tem-
poral correlation radius τ
0
of random field f (x, t) with respect to all temporal scales of
the problem under consideration. The effect of the finite-valued temporal correlation
radius of random field f (x, t) can be considered within the framework of the diffusion
approximation. The diffusion approximation appears to be more obvious and physical
than the formal mathematical derivation of the approximation of the delta-correlated
random field. This approximation also holds for sufficiently weak parameter fluctua-
tions of the stochastic dynamic system and allows us to describe new physical effects
caused by the finite-valued temporal correlation radius of random parameters, rather
than only obtaining the applicability range of the delta-correlated approximation. The
diffusion approximation assumes that the effect of random actions is insignificant dur-
ing temporal scales about τ
0
, i.e., the system behaves during these time intervals as
the free system.
Again, assume vector function x(t) satisfies the dynamic equation (8.1), page 191,
d
dt
x(t) = v(x, t) + f (x, t), x(t
0
) = x
0
, (8.79)
where v(x, t) is the deterministic vector function and f (x, t) is the random statistically
homogeneous and stationary Gaussian vector field with the statistical characteristics
h
f (x, t)
i
= 0, B
ij
(x, t;x
0
, t
0
) = B
ij
(x − x
0
, t − t
0
) =
f
i
(x, t)f
j
(x
0
, t
0
)
.
Introduce the indicator function
ϕ(x, t) = δ(x(t) − x), (8.80)
where x(t) is the solution to Eq. (8.79) satisfying the Liouville equation (8.6)
∂
∂t
+
∂
∂x
v(x, t)
ϕ(x, t) = −
∂
∂x
f (x, t)ϕ(x, t). (8.81)
Approximations of Gaussian Random Field Delta-Correlated in Time 219
As earlier, we obtain the equation for the probability density of the solution to
Eq. (8.79)
P(x, t) =
h
ϕ(x, t)
i
=
h
δ(x(t) − x)
i
by averaging Eq. (8.81) over an ensemble of realizations of field f(x, t)
∂
∂t
+
∂
∂x
v(x, t)
P(x, t) = −
∂
∂x
h
f (x, t)ϕ(x, t)
i
,
P(x, t
0
) = δ(x − x
0
).
(8.82)
Using the Furutsu–Novikov formula (8.10), page 193,
h
f
k
(x, t)R[t;f(y, τ )]
i
=
Z
dx
0
Z
dt
0
B
kl
(x, t;x
0
, t
0
)
δ
δ f
l
(x
0
, t
0
)
R[t;f (y, τ )]
valid for the correlation between the Gaussian random field f (x, t) and arbitrary func-
tional R[t;f (y, τ )] of this field, we can rewrite Eq. (8.82) in the form
∂
∂t
+
∂
∂x
v(x, t)
P(x, t) = −
∂
∂x
i
Z
dx
0
t
Z
t
0
dt
0
B
ij
(x, t;x
0
, t
0
)
δ
δ f
j
(x
0
, t
0
)
ϕ(x, t)
.
(8.83)
In the diffusion approximation, Eq. (8.83) is the exact equation, and the variational
derivative and indicator function satisfy, within temporal intervals of about temporal
correlation radius τ
0
of random field f(x, t), the system of dynamic equations
∂
∂t
δϕ(x, t)
δf
i
(x
0
, t
0
)
= −
∂
∂x
v(x, t)
δϕ(x, t)
δf
i
(x
0
, t
0
)
,
δϕ(x, t)
δf
i
(x
0
, t
0
)
t=t
0
= −
∂
∂x
i
δ(x − x
0
)ϕ(x, t
0
)
,
∂
∂t
ϕ(x, t) = −
∂
∂x
{
v(x, t)ϕ(x, t)
}
, ϕ(x, t)|
t=t
0
= ϕ(x, t
0
).
(8.84)
The solution to problem (8.83), (8.84) holds for all times t. In this case, the
solution x(t) to problem (8.79) cannot be considered as the Markovian vector random
process because its multi-time probability density cannot be factorized in terms of
the transition probability density. However, in asymptotic limit t τ
0
, the diffusion-
approximation solution to the initial dynamic system (8.79) will be the Markovian
random process, and the corresponding conditions of applicability are formulated as
smallness of all statistical effects within temporal intervals of about temporal correla-
tion radius τ
0
.
220 Lectures on Dynamics of Stochastic Systems
Problems
Problem 8.1
Assuming that ε(x, R), is the homogeneous isotropic delta-correlated Gaussian
field with zero-valued mean and correlation function
B
ε
(x −x
0
, R − R
0
) =
ε(x, R)ε(x
0
, R
0
)
= A(R − R
0
)δ(x − x
0
),
derive the Fokker–Planck equation for the diffusion of rays satisfying system of
equations (1.92), page 42,
d
dx
R(x) = p(x),
d
dx
p(x) =
1
2
∇
R
ε(x, R). (8.85)
Solution Function P(x;R, p) =
h
δ(R(x) − R)δ(p(x) − p)
i
satisfies the Fokker–
Planck equation
∂
∂x
+ p
∂
∂R
P(x;R, p) = D1
R
P(x;R, p)
with the diffusion coefficient D = −
1
8
1
R
A(R)
|
R=0
= π
2
Z
∞
0
dκκ
3
8
ε
(0, κ).
Here,
8
ε
(q, κ) =
1
(2π)
3
∞
Z
−∞
dx
Z
dRB
ε
(x, R)e
−i
(
qx+κR
)
,
A(R) = 2π
Z
dκ8
ε
(0, κ)e
iκR
,
is the three-dimensional spectral density of random field ε(x, R).
Solution corresponding to the initial condition P(0;R, p) = δ(R)δ(p) is the
Gaussian probability density with the parameters
R
j
(x)R
k
(x)
=
2
3
Dδ
jk
x
3
,
R
j
(x)p
k
(x)
= Dδ
jk
x
2
,
p
j
(x)p
k
(x)
= 2Dδ
jk
x.
Problem 8.2
Assuming that ε(x, R) is the homogeneous isotropic delta-correlated Gaussian
field with zero-valued mean and correlation function
B
ε
(x −x
0
, R − R
0
) =
ε(x, R)ε(x
0
, R
0
)
= A(R − R
0
)δ(x − x
0
),

Approximations of Gaussian Random Field Delta-Correlated in Time 221
derive, starting from Eqs. (8.85), the longitudinal correlation function of ray
displacement.
Solution
R(x)R(x
0
)
= 2D(x
0
)
2
x −
1
3
x
0
.
Problem 8.3
Consider the diffusion of two rays described by the system of equations
d
dx
R
ν
(x) = p
ν
(x),
d
dx
p
ν
(x) =
1
2
∇
R
ν
ε(x, R
ν
),
where index ν = 1, 2 denotes the number of the corresponding ray.
Solution The joint probability density
P(x;R
1
, p
1
, R
2
, p
2
) =
δ(R
1
(x) −R
1
)δ(p
1
(x) −p
1
)δ(R
2
(x) −R
2
)δ(p
2
(x) −p
2
)
satisfies the Fokker–Planck equation
∂
∂x
+ p
1
∂
∂R
1
+ p
2
∂
∂R
2
P(x;R
1
, p
1
, R
2
, p)
=
b
L
∂
∂p
1
,
∂
∂p
2
P(x;R
1
, p
1
, R
2
, p),
where operator
b
L
∂
∂p
1
,
∂
∂p
2
=
π
4
Z
dκ8
ε
(0, κ)
"
κ
∂
∂p
1
2
+
κ
∂
∂p
2
2
+ 2 cos
[
κ(R
1
− R
2
)
]
κ
∂
∂p
1
κ
∂
∂p
1
.
Problem 8.4
Consider the relative diffusion of two rays.
Solution Probability density of relative diffusion of two rays
P(x;R, p) =
δ(R
1
(x) − R
2
(x) − R)δ(p
1
(x) − p
2
(x) − p)
,
222 Lectures on Dynamics of Stochastic Systems
satisfies the Fokker–Planck equation
∂
∂x
+ p
∂
∂R
P(x;R, p) = D
αβ
(R)
∂
2
∂p
α
∂p
β
P(x;R, p), (8.86)
where
D
αβ
(R) = 2π
Z
dκ
[
1 − cos
(
κR
)
]
κ
α
κ
β
8
ε
(0, κ).
Remark If l
0
is the correlation radius of random field ε(x, R), than under the
condition R l
0
we have
D
αβ
(R) = 2Dδ
αβ
,
i.e., relative diffusion of rays is characterized by the diffusion coefficient exceed-
ing the diffusion coefficient of a single ray by a factor of 2, which corresponds to
statistically independent rays. In this case, the joint probability density of relative
diffusion is Gaussian.
In the general case, Eq. (8.86) can hardly be solved in the analytic form. The
only clear point is that the solution corresponding to variable diffusion coefficient
is not the Gaussian distribution.
Asymptotic case R l
0
can be analyzed in more detail. In this case, we
can expand function
{
1 − cos
(
κR
)
}
in the Taylor series to obtain the diffusion
matrix in the form
D
αβ
(R) = πB
R
2
δ
aβ
+ 2R
α
R
β
, (8.87)
where
B =
π
4
∞
Z
0
dκκ
5
8
ε
(0, κ).
From Eq. (8.86) with coefficients (8.87) follow three equations for moment func-
tions
d
dx
D
p
2
(x)
E
= 8πB
D
R
2
(x)
E
,
d
dx
D
R
2
(x)
E
= 2
h
R(x)p(x)
i
,
d
dx
h
R(x)p(x)
i
=
D
p
2
(x)
E
.
Approximations of Gaussian Random Field Delta-Correlated in Time 223
These equations can be easily solved. From the solution follows that, for x from
the interval in which αx 1 (α =
(
16πB
)
1/3
), but R
2
0
e
αx
l
2
0
(such an interval
always exists for sufficiently small distances R
0
between the rays under conside-
ration), quantities
R
2
(x)
,
h
R(x)p(x)
i
, and
p
2
(x)
are exponentially increasing
functions of x.
Problem 8.5
Derive an equation for the probability density of magnetic field with homoge-
neous initial conditions with the use of the simplest model of velocity field (1.3),
(1.4), page 4,
u(r, t) = v(t)f (kx),
where v(t) is the stationary Gaussian vector random process with the correlation
tensor
v
i
(t)v
j
(t
0
)
= 2σ
2
δ
ij
τ
0
δ(t − t
0
),
where σ
2
is the variance of every velocity component, τ
0
is the temporal corre-
lation radius of these components, and f (kx) is a deterministic function.
Solution In the dimensionless variables
t → k
2
σ
2
τ
0
t, x → kx,
v
i
(t)v
j
(t
0
)
→ 2δ
ij
δ(t − t
0
),
the indicator function of the transverse portion of magnetic field is described by
Eq. (3.27), page 76. Averaging this equation over an ensemble of realizations of
vector function v(t), we obtain the equation
∂
∂t
P(x, t;H) =
∂
∂x
f
2
(x)
∂
∂x
− f (x)f
0
(x)
∂
∂H
H
P(x, t;H)
+
1 +
∂
∂H
H
−f (x)f
0
(x)
∂
∂x
+
f
0
(x)
2
∂
∂H
H
P(x, t;H)
+
f
0
(x)
2
E
x0
∂
∂H
i
∂
∂H
i
P(x, t;H).
Remark If function f (x) varies along x with characteristic scale k
−1
and is a
periodic function (‘fast variation’), then additional averaging over x results in an
224 Lectures on Dynamics of Stochastic Systems
equation for ‘slow’ spatial variations
∂
∂t
P(x, t;H) =
∂
∂x
f
2
(x)
∂
∂x
P(x, t;H)
+
[
f
0
(x)
]
2
1 +
∂
∂H
H
∂
∂H
HP(x, t;H) +
[
f
0
(x)
]
2
E
x0
∂
2
∂H
2
P(x, t;H).
Taking into account the fact that function P(x, t;H) is independent of x in view
of the initial conditions, we obtain the equation
∂
∂t
P(t;H) = D
∂
∂H
H +
∂
∂H
H
∂
∂H
H
P(t;H) + DE
x0
∂
2
∂H
2
P(t;H),
where D =
[
f
0
(x)
]
2
. Then, introducing the normalized time (t → Dk
2
σ
2
τ
0
t), we
obtain the equation in the final form
∂
∂t
P(t;H) =
∂
∂H
H +
∂
∂H
H
∂
∂H
H
P(t;H) + E
x0
∂
2
∂H
2
P(t;H). (8.88)
Problem 8.6
Starting from Eq. (8.88), derive an equation for the probability density of gener-
ated energy of the transverse portion of magnetic field with the use of the simplest
model of velocity field (1.3), (1.4), page 4.
Solution Multiplying Eq. (8.88) by δ(H
2
−E) and integrating over H, we obtain
the equation
∂
∂t
P(t;E) =
2
∂
∂E
E + 4
∂
∂E
E
∂
∂E
E
P(t;E) + 4E
x0
∂
∂E
E
∂
∂E
P(t;E).
(8.89)
Introduce dimensionless energy by normalizing it by E
x0
. The result will be
the equation
∂
∂t
P(t;E) =
2
∂
∂E
E + 4
∂
∂E
E
∂
∂E
E
P(t;E) + 4
∂
∂E
E
∂
∂E
P(t;E), (8.90)
with the initial condition
P(0;E) = δ(E − β),
where β = E
⊥0
/E
x0
.
Approximations of Gaussian Random Field Delta-Correlated in Time 225
Remark It should be remembered that problem (8.90) is the boundary-value prob-
lem, and boundary conditions are the requirements of vanishing the probability
density at E = 0 and E = ∞ for arbitrary time t > 0. In addition, Eq. (8.90)
generally has a steady-state solution independent of parameter β and character-
ized by infinite moments,
P(∞;E) =
1
2
(
E + 1
)
3/2
. (8.91)
It should be kept in mind that this distribution is a generalized function and is
valid on interval (0, ∞). As for point E = 0, the probability density must vanish
at this point.
Note that, at β = 1 and E
x0
= 0, probability density of energy normalized by
E
⊥0
satisfies Eq. (8.90) without the last term and, consequently, the correspon-
ding probability density is lognormal,
P(t;E) =
1
4
√
πtE
exp
−
1
16t
ln
2
Ee
2t
. (8.92)
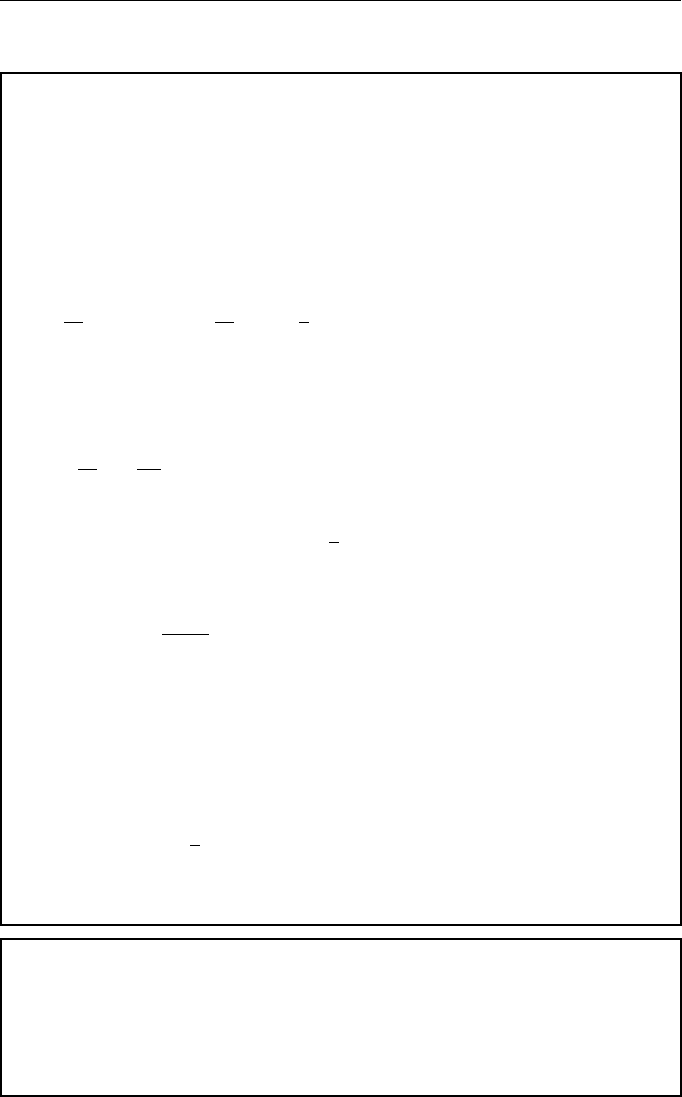
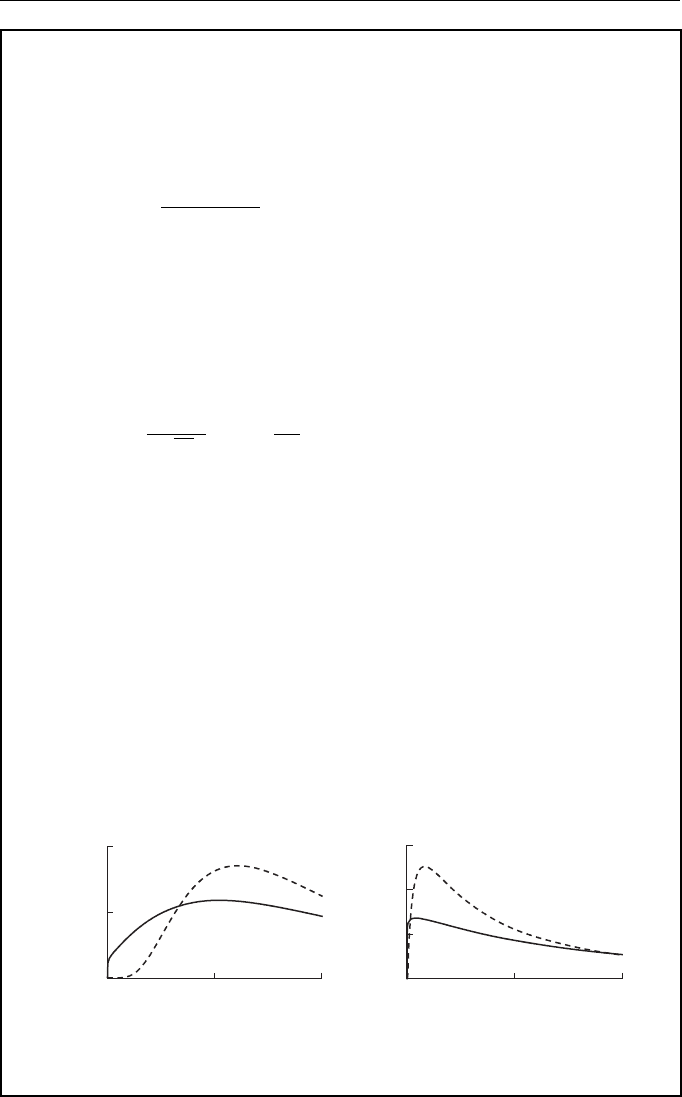
This structure of probability density will evidently be valid only for very small
time intervals during which the generating term is still insignificant. The solid
lines in Fig. 8.5 show the solutions to Eq. (8.90) obtained numerically for para-
meter β = 1 at (a) t = 0.05 and (b) t = 0.25. The dashed lines in Fig. 8.5 show
the lognormal distribution (8.92). These curves show that the term responsible
for energy generation in Eq. (8.90) prevails even for small times.
Figure 8.6 shows the solution to 8.90) (the solid lines) for β = 0 (i.e.,
the probability density of the generated magnetic energy) at t = 10 and the
asymptotic curve (8.91) (the dashed line). These curves indicate that only the
tail of the solution to Eq. (8.90) verges towards the asymptotic solution (8.91)
(see Fig. 8.6a), and this process is very slow (see Fig. 8.6b). The curves inter-
sect because of normalization of the probability densities under consideration. It
seems that probability density P(t;E) will approach the tail of the steady-state
probability density with further increasing time.
0
0.5 1
EE
0
0.5
1
P(t ; E )
(a) (b)
0
0.5 1
0
0.5
1
1.5
P(t ; E )
Figure 8.5 Probability distributions at β = 1 at times (a) t = 0.05 and (b) t = 0.25.