Киселёв Ю.Н. Оптимальное управление
Подождите немного. Документ загружается.

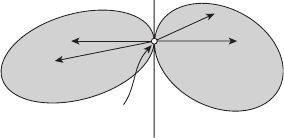
x(t)
ψ(t)
−ψ(t)
X(t)
Z(t)
ξ
ζ
Γ
ψ(t)
Рисунок 11.4
3.12 Теорема существования оптимального управле-
ния
При доказательстве теоремы существования оптимального управ-
ления в линейной задаче быстродействия предполагается компакт-
ность множеств M
0
, M
1
(выпуклости этих множеств не требует-
ся) и существенно используется компактность множества достижи-
мости X(t) и его непрерывная зависимость от времени t (см. раз-
дел 3.8); кроме того, предполагается управляемость объекта из M
0
в M
1
на некотором конечном отрезке времени [t
0
,T].
В случае выпуклости компактов M
0
, M
1
доказательство теоремы
сильно упрощается (см. ниже замечание 12.1).
Теорема 12.1. Пусть
1) M
0
, M
1
∈ Ω(E
n
);
2) класс допустимых управлений У состоит из функций, интегри-
руемых по Лебегу;
3) на некотором конечном отрезке времени [t
0
,T] объект управляем
из M
0
в M
1
.
Тогда в классе допустимых управлений У существует оптимальное
управление u(t), t
0
t t
1
, t
1
T , для рассматриваемой линейной
задачи быстродействия.
2 Пусть X(t)=X(t
0
,t,M
0
) – множество достижимости. По тре-
тьему условию теоремы
X(T )
"
M
1
= ∅, (1)
т.е. множество X(T ) имеет хотя бы одну общую точку с множе-
ством M
1
(см. рисунок 12.1).
111
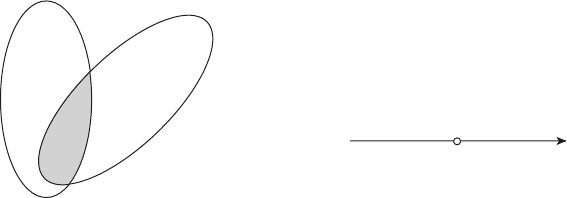
t
t
0
t
1
T
X(T )
M
1
#$
Рисунок 12.1
Рассмотрим множество
I = {t ∈ [t
0
,T]: X(t)
"
M
1
= ∅}.
Это множество непусто, так как T ∈ I,см.(1),иограниченоснизу
числом t
0
.Положим
t
1
=infI.
Из определения числа t
1
следует, что
X(t)
"
M
1
= ∅ при t
0
t<t
1
. (2)
Мы покажем ниже, что
X(t
1
)
"
M
1
= ∅. (3)
Выполнение соотношений (2) и (3) означает оптимальность време-
ни t
1
. Из (3) и определения множества достижимости X(t
1
) следует
существование допустимого управления u(t), t
0
t t
1
,переводя-
щего объект из множества M
0
на множество M
1
. Это управление и
является оптимальным управлением для рассматриваемой линейной
задачи быстродействия.
Итак, остаётся доказать утверждение (3). Это доказательство опи-
рается на следующую лемму.
Лемма 12.1. Существует такая точка x
∗
∈ M
1
,что
∀ε>0 x
∗
∈ X(t
1
)+S
ε
(0).
2 Возьмём последовательность {T
k
} такую, что
T
k
t
1
,T
k
→ t
1
при k →∞,X(T
k
)
"
M
1
= ∅ ∀k.
112
Возможность выбора такой последовательности {T
k
} вытекает из оп-
ределения числа t
1
. Существует такая точка x
k
∈ E
n
,что
x
k
∈ X(T
k
)
"
M
1
∀k. (4)
Так как x
k
∈ M
1
∀k,иM
1
– компакт, то из последовательности {x
k
}
можно выбрать сходящуюся к некоторой точке x
∗
∈ M
1
подпоследо-
вательность. Не изменяя обозначений, будем считать, что
x
k
→ x
∗
∈ M
1
,k→∞. (5)
Из непрерывной зависимости множества достижимости X(t) от вре-
мени t (свойство 4
◦
, раздел 3.8) и предельного соотношения T
k
→ t
1
(k →∞) следует, что
h(X(T
k
),X(t
1
)) → 0,k→∞. (6)
Из (5), (6) следует, что для любого числа ε>0
1) ∃k
0
= k
0
(ε) > 0: ∀k k
0
x
∗
− x
k
ε
2
,
т.е.
∀k k
0
x
∗
∈{x
k
} + S
ε
2
(0); (7)
2) ∃k
1
= k
1
(ε) > 0: ∀k k
1
h(X(T
k
),X(t
1
))
ε
2
,
и поэтому в силу определения расстояния Хаусдорфа
∀k k
1
X(T
k
) ⊂ X(t
1
)+S
ε
2
(0). (8)
Полагая k
2
= max{k
0
,k
1
} и привлекая соотношения (7), (4), (8), по-
лучим (считая номер k k
2
)
x
∗
(7)
∈{x
k
} + S
ε
2
(0)
(4)
⊂ X(T
k
)+S
ε
2
(0)
(8)
⊂ X(t
1
)+S
ε
2
(0) + S
ε
2
(0) =
= X(t
1
)+S
ε
(0). (9)
Лемма 12.1 доказана.
Покажем, в заключение, что утверждение (3) следует из доказан-
ной леммы 12.1. Действительно, положив ε =
1
m
, m =1, 2,...,имеем
x
∗
∈ M
1
и x
∗
∈ X(t
1
)+
1
m
S
1
(0),m=1, 2,...
113

По определению алгебраической суммы двух множеств точку x
∗
мож-
но представить в виде
x
∗
= ξ
m
+
1
m
ψ
m
, где ξ
m
∈ X(t
1
), ψ
m
1. (10)
В силу компактности множества достижимости X(t
1
) из последова-
тельности {ξ
m
} можно выбрать подпоследовательность, сходящуюся
к некоторой точке ξ
∗
∈ X(t
1
). Не изменяя обозначений, будем счи-
тать, что ξ
m
→ ξ
∗
, m →∞. Тогда предельный переход при m →∞
в (9) даёт x
∗
= ξ
∗
∈ X(t
1
), т.е. доказано соотношение (3), так как
x
∗
∈ X(t
1
) иодновременноx
∗
∈ M
1
.
Замечание 12.1. В случае выпуклости компактов M
0
, M
1
тео-
рема существования оптимального управления доказывается намного
проще. Действительно, в силу выпуклости компактов X(T
k
) (свой-
ство 3
◦
,раздел3.8)иM
1
,условие
X(T
k
)
"
M
1
= ∅
на основании следствия из свойства 14
◦
раздела 2.5 равносильно усло-
вию
c(X(T
k
),ψ)+c(M
1
, −ψ) 0 ∀ψ ∈ S.
Перейдём в последнем неравенстве к пределу, устремив k к бесконеч-
ности (при каждом фиксированном ψ ∈ S). Тогда, используя свойство
непрерывности опорной функции по первому аргументу и условие (6),
получим неравенство
c(X(t
1
),ψ)+c(M
1
, −ψ) 0 ∀ψ ∈ S,
которое, в силу следствия из свойства 14
◦
раздела 2.5, равносильно
условию (3), что завершает доказательство теоремы существования в
случае M
0
, M
1
∈ conv Ω(E
n
).
3.13 Примеры применения необходимых условий оп-
тимальности для решения линейных задач быст-
родействия
Теорема о необходимых условиях оптимальности в форме прин-
ципа максимума Понтрягина (раздел 3.11) и теорема существования
оптимального управления (раздел 3.12) позволяют в рассмотренных
114
ниже примерах построить оптимальные решения. Здесь мы пользу-
емся следующей схемой рассуждений: если существует единственная
пара (x(t),u(t)), t
0
t t
1
, удовлетворяющая принципу максимума
Понтрягина, то эта пара является оптимальной. Действительно, нали-
чие такой пары обеспечивает управляемость объекта на отрезке [t
0
,t
1
]
и (на основании теоремы из раздела 3.12) существование оптималь-
ного управления. Оптимальная пара должна удовлетворять принципу
максимума Понтрягина (теорема из раздела 3.11, подраздел 3.11.4), и
в силу единственности пары (x(t),u(t)), удовлетворяющей принципу
максимума, эта пара (x(t),u(t)) оптимальна.
В примерах 13.1, 13.2 множества M
0
, M
1
состоят из одной точки
при этом условия трансверсальности б), в) выполняются автомати-
чески и в анализе задачи участия не принимают
. В примере 13.1 па-
ра (x(t),u(t)), удовлетворяющая принципу максимума, единственна.
В примере 13.2 рассмотрена ситуация, когда пара (x(t),u(t)),удовле-
творяющая принципу максимума, неединственна; это обстоятельство
позволяет поставить вопрос об изучении достаточных условий оп-
тимальности (см. разделы 3.14, 3.15). Рассмотрены также примеры,
требующие привлечения условий трансверсальности.
Пример 13.1. Задача быстродействия для тележки. Рассмотрим
линейную задачу быстродействия при n =2, t
0
=0,
A =
01
00
,U=
%
u ∈ E
2
: u
1
=0, |u
2
| 1
&
,
M
0
=
a
b
,M
1
=
0
0
,
т.е. следующую задачу
⎧
⎪
⎪
⎪
⎨
⎪
⎪
⎪
⎩
˙x
1
= x
2
,x
1
(0) = a, x
2
(0) = b,
˙x
2
= u
2
,x
1
(t
1
)=0,x
2
(t
1
)=0,
|u
2
| 1,u∈ U = {u ∈ E
2
: u
1
=0, |u
2
| 1},
t
1
→ min .
(задача быстродействия для тележки, движущейся без трения под
действием ограниченной внешней силы). Множество M
0
начальных
состояний состоит из одной точки x
0
=
a
b
, а множество M
1
ко-
нечных состояний состоит из одной точки, совпадающей с началом
координат фазовой плоскости. Требуется перевести рассматриваемый
115
управляемый объект из точки x
0
в начало координат при помощи до-
пустимого управления за минимальное время. Область управления U
имеет форму отрезка (см. рисунок 13.1).
x
1
x
2
0
1
−1
U
M
0
=
%
x
0
&
M
1
=
%
0
&
x
0
=
a
b
Рисунок 13.1
Для решения этой задачи применяем принцип максимума Понтря-
гина
условие максимума а); условия трансверсальности б), в), кото-
рые для одноточечных множеств выполняются автоматически, в ре-
шении задачи участия не принимают
.
Пусть u(t)=
u
1
(t)
u
2
(t)
– оптимальное управление. Оно удовлетво-
ряет условию максимума
а) (u(t),ψ(t)) = c(U, ψ(t)) (1)
с некоторой сопряжённой переменной ψ(t)=
ψ
1
(t)
ψ
2
(t)
.Таккак
c(U, ψ)=|ψ
2
|,ψ=
ψ
1
ψ
2
,
то условие (1) принимает вид
u
1
(t) ψ
1
(t)+u
2
(t) ψ
2
(t)=|ψ
2
(t)|. (2)
116
Так как u(t) ∈ U,тоu
1
(t)=0,иусловие(2)можнозаписатьвформе
u
2
(t) ψ
2
(t)=|ψ
2
(t)|. (3)
Из (3) получаем, что
u
2
(t)= 1, если ψ
2
(t) > 0,
u
2
(t)=−1, если ψ
2
(t) < 0,
−1 u
2
(t) 1, если ψ
2
(t)=0.
(4)
Впоследнемслучае(ψ
2
(t)=0)управление u
2
(t) условием максиму-
ма (3) не определяется однозначно. Найдём сопряжённую переменную
ψ(t)=e
−tA
∗
ψ(0) =
10
−t 1
ψ
10
ψ
20
=
ψ
10
−tψ
10
+ ψ
20
;
здесь ψ(0) =
ψ
10
ψ
20
=0– вектор начальных значений сопряжённой
переменной. Таким образом,
ψ
1
(t) ≡ ψ
10
,ψ
2
(t)=−tψ
10
+ ψ
20
. (5)
Функция ψ
2
(t) линейно зависит от времени t и имеет не более одного
корня. Поэтому управление u
2
(t) однозначно определяется сопряжён-
ной переменной при всех t,крометогоt,длякоторогоψ
2
(t)=0,
см. (4). Итак,
u
2
(t)=sign ψ
2
(t). (6)
Принцип максимума, таким образом, позволил нам установить следу-
ющее очень важное качественное свойство оптимального управления
см. (6)
: оптимальное управление u
2
(t) является кусочно-постоянной
функцией времени t, принимающей значения ±1 и имеющей не более
одной точки переключения. В зависимости от начальных значений со-
пряжённой переменной ψ
10
, ψ
20
управление u
2
(t), определяемое фор-
мулой (6), может иметь только один из следующих типов (см. рису-
нок 13.2):
I. u
2
(t)=
−1, 0 t<τ
+1,τ<t
(одна точка переключения τ),
II. u
2
(t)=
+1, 0 t<τ
−1,τ<t
(одна точка переключения τ),
117
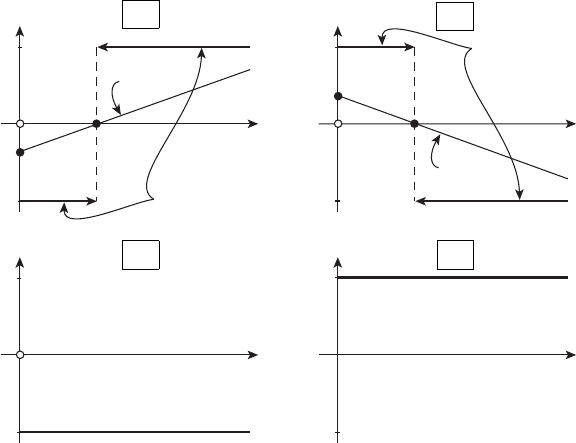
III. u
2
(t) ≡−1 (точек переключения нет),
IV. u
2
(t) ≡ +1 (точек переключения нет).
tt
tt
uu
uu
00
00
+1 +1
+1 +1
−1
−1 −1
−1
ττ
ψ
2
(t)
ψ
2
(t)
ψ
20
ψ
20
u = u
2
(t)
u = u
2
(t)
u
2
(t)=−1
u
2
(t)=+1
I
II
III IV
Рисунок 13.2
Упражнение 13.1. Выяснить, при каких условиях на ψ
10
, ψ
20
ре-
ализуется каждый из четырёх типов I–IV управления u
2
(t), t 0.
В точке переключения τ = ψ
20
/ψ
10
управление u
2
(t) условием
максимума не определяется однозначно, см. (4).
Таким образом, оптимальное управление u
2
(t) может иметь только
один из указанных четырех типов I–IV. Нам пока неизвестно, какой
именно тип оптимального управления u
2
(t) соответствует заданному
начальному состоянию объекта x
0
.
Чтобы решить последний вопрос, мы найдём сначала траектории
рассматриваемой управляемой системы при u
2
=+1,т.е.системы
˙x
1
= x
2
,
˙x
2
=+1.
(7)
118
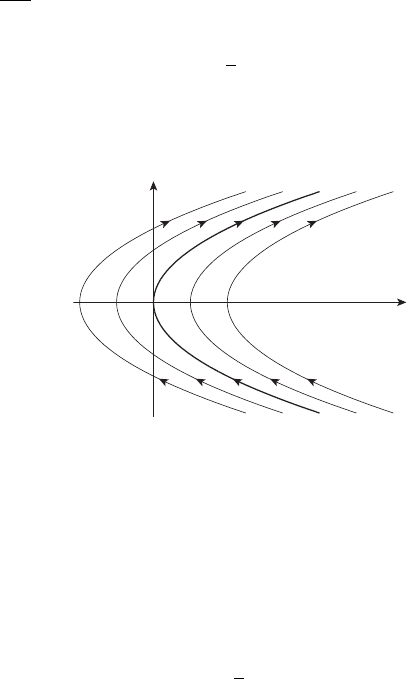
Имеем
dx
1
dx
2
= x
2
, откуда
x
1
=
1
2
x
2
2
+ c
1
, (8)
где c
1
– постоянная интегрирования. Уравнением (8) определяется
семейство парабол, изображённых на рисунке 13.3.
x
1
x
2
0
c
1
< 0 c
1
=0 c
1
> 0
Рисунок 13.3
Движение фазовой точки системы (7) по параболам семейства (8)
происходит снизу вверх при возрастании времени t, в силу того, что
˙x
2
=1> 0; направление движения фазовой точки с ростом времени t
отмечено на рисунке 13.3 стрелками.
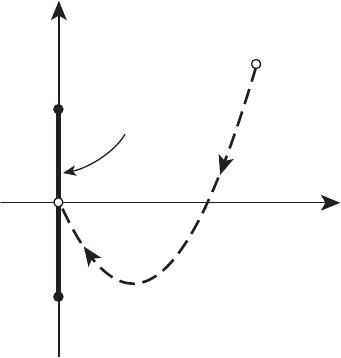
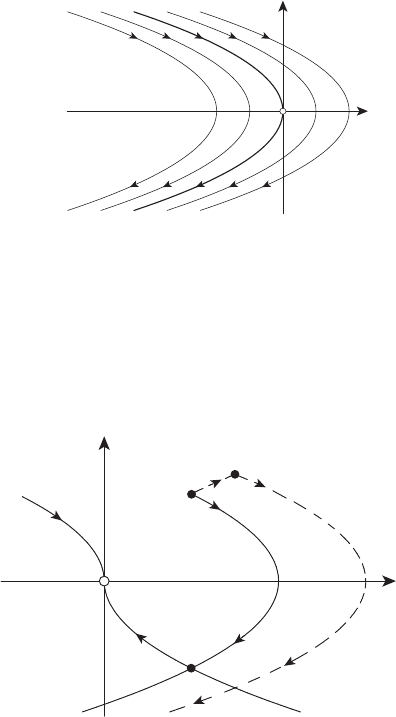
При u
2
= −1 вместо семейства парабол (8) получаем семейство
парабол
x
1
= −
1
2
x
2
2
+ c
2
, (9)
изображённых на рисунке 13.4. Движение фазовой точки по парабо-
лам семейства (9) происходит сверху вниз, в силу того, что теперь
˙x
2
= −1 < 0.
Поставим вопрос: из каких точек фазовой плоскости можно по-
пасть в начало координат за конечное время при помощи постоянного
управления u
2
(t) ≡ +1, т.е. по траекториям (8) системы (7)? Рассмот-
рение рисунка 13.3 позволяет получить следующий ответ: такие точки
расположены на части AO параболы семейства (8), проходящей через
начало координат (c
1
=0), см. рисунок 13.5.
119
x
1
x
2
0
c
1
< 0 c
1
=0 c
1
> 0
Рисунок 13.4
Те точки фазовой плоскости, из которых можно попасть в начало
координат за конечное время при помощи постоянного управления
u
2
(t) ≡−1, заполняют часть BO параболы семейства (9), проходящей
через начало координат (c
2
=0), см. рисунок 13.5.
x
1
x
2
0
u
2
=+1
u
2
=+1
u
2
= −1
u
2
= −1
A
B
I
II
x
0
y
0
Рисунок 13.5
Из точек фазовой плоскости, не лежащих на линии AOB,попасть
в начало координат при помощи постоянных управлений u
2
≡ +1 или
u
2
≡−1 невозможно (проверить!).
Рассмотрим теперь случай, когда точка x
0
(начальное состояние
объекта) расположена выше линии AOB. При движении фазовой точ-
120