King M.R., Mody N.A. Numerical and Statistical Methods for Bioengineering: Applications in MATLAB
Подождите немного. Документ загружается.

y = zeros(n, length(t)); % dependent variable vector
y(:,1) = y0; % initial condition at t = 0
% indexing of matrix elements begins with 1 in MATLAB
% Euler’s forward method for solving coupled first-order ODEs
for k = 1:length(t)-1
y(:,k+1) = y(:,k)+ h*feval(odefunc, t(k), y(:,k));
end
MATLAB program 7.4
function f = settlingsphere(t, y)
% Evaluate slopes f(t,y) of coupled equations
a = 10e-4; % cm : radius of sphere
rhos = 1.1; % g/cm3 : density of sphere
rhof = 1; % g/cm3 : density of medium
g = 981; % cm/s2 : acceleration due to gravity
mu = 3.5e-2; % g/cm.s : viscosity
f = [y(2); (rhos - rhof)*g/rhos - (9/2)*mu*y(2)/(a^2)/rhos];
Equations (7.27) and (7.28) are solved by calling the eulerforwardmethodvectorized func-
tion from the MATLAB command line. We choose a step size of 0.0001 s:
44
[t, y] = eulerforwardmethodvectorized (‘settlingsphere’, 0.001,
[0; 0], 0.0001);
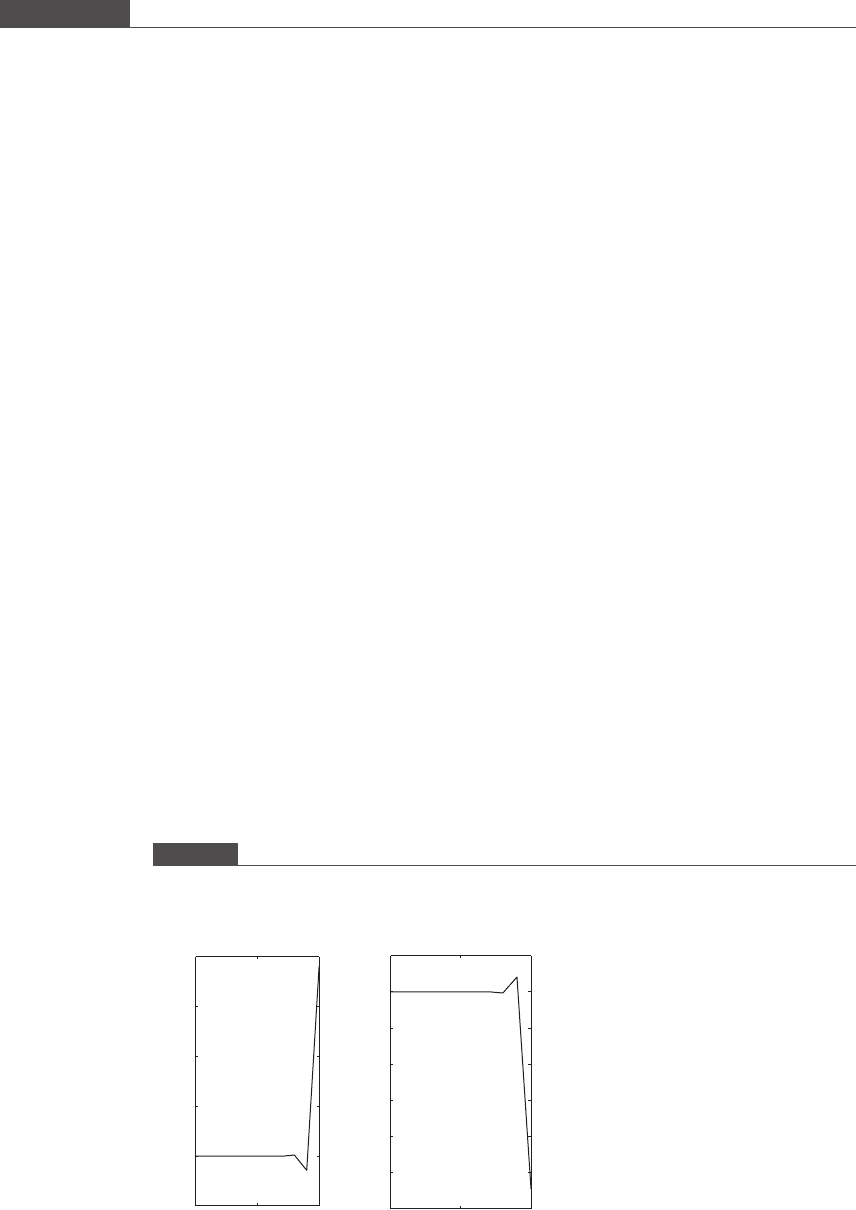
Plotting the numerically calculated displacement z and the velocity dz=dt with time (Figure 7.3), we
observe that the solution blows up. We know that physically this cannot occur. When the sphere falls from
rest through the viscous medium, the downward velocity increases monotonically from zero and
reaches a final settling velocity. At this point the acceleration reduces to zero. The numerical method is
unstable for this choice of step size since the solution grows without bound even though the exact
solution is bounded. You can calculate the terminal settling velocity by assuming steady state for the force
balance (acceleration term is zero).
Figure 7.3
Displacement and velocity trajectories for a sphere settling under gravity in Stokes flow. Euler’s explicit method exhibits
numerical instabilities for the chosen step size of h = 0.0001 s.
0 0.5 1
−2
0
2
4
6
8
× 10
6
t (ms)
z (μm)
0 0.5 1
−12
−10
−8
−6
−4
−2
0
2
× 10
11
t (ms)
v (μm/s)
427
7.2 Euler’s methods
We reduce the step size by an order of magnitude to 0.00001 s:
44
[t, y] = eulerforwardmethodvectorized (‘settlingsphere’, 0.0001,
[0; 0], 0.00001);
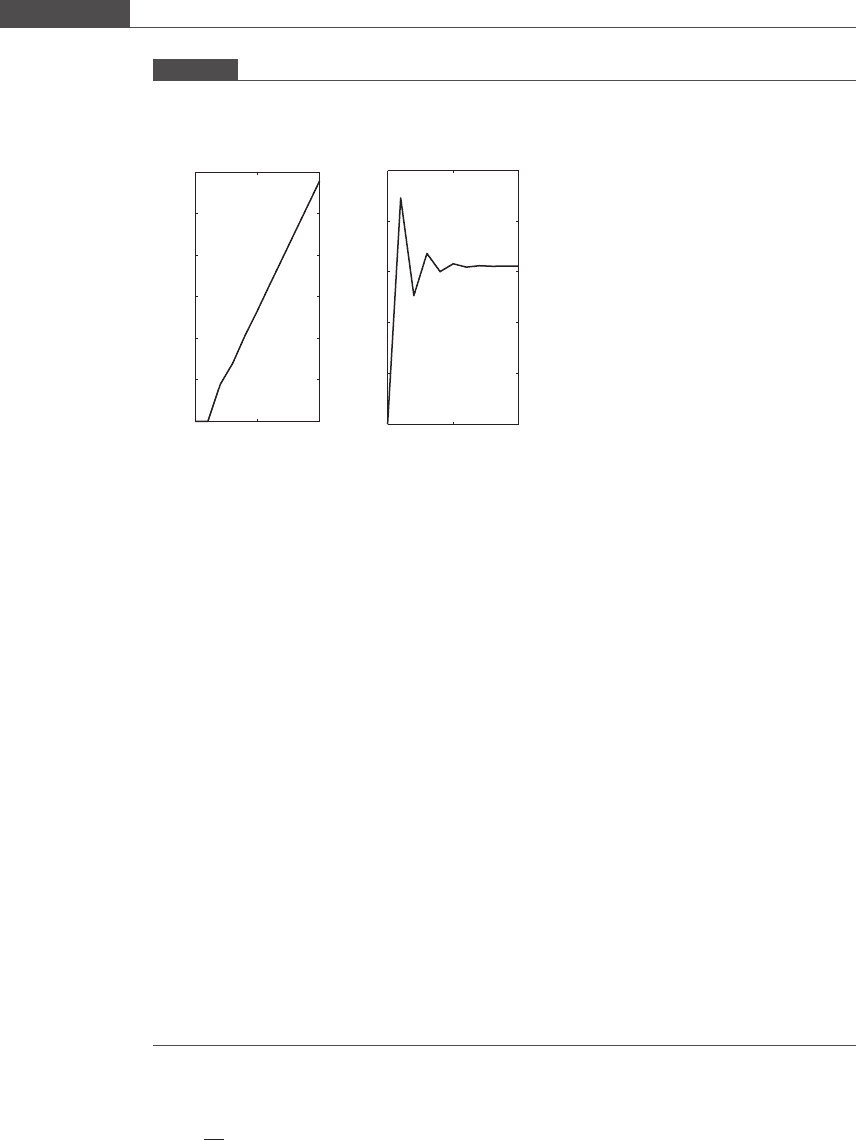
and re-plotting the time-dependent displacement and velocity (Figure 7.4), we observe that the final
solution is bounded, but the velocity profile is unrealistic. The numerical method is stable for this choice of
step size, yet the solution is terribly inaccurate; the steps are too far apart to predict a physically realizable
situation.
Finally we choose a step size of 1 μ s. Calling the function once more:
44
[t, y] = eulerforwardmethodvectorized (‘settlingsphere’, 0.0001,
[0; 0], 0.000001);
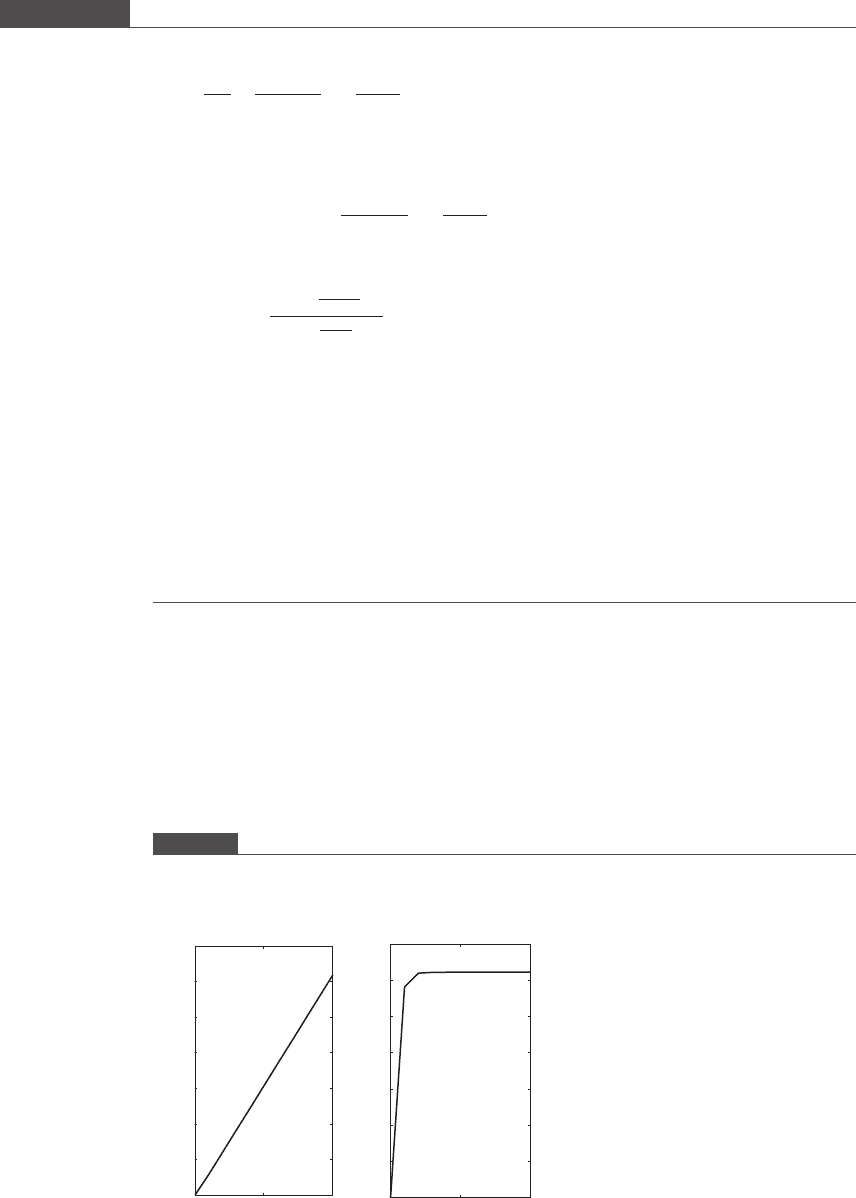
we obtain a physically meaningful solution in which the settling velocity of the falling sphere monotonically
increases until it reaches the terminal velocity, after which it does not increase or decrease. Figure 7.5 is a
plot of the numerical solution of the coupled system using a step size of 1 μs.
Some differential equations are sensitive to step size, and require exceedingly small step sizes to
guarantee stability of the solution. Such equations are termed as stiff. Issues regarding stability of the
numerical technique and how best to tackle stiff problems are taken up in Section 7.6.
7.2.2 Euler’s backward method
For deriving Euler’s forward method, the forward finite difference formula was used
to approximate the first derivative of y. To convert the differential problem
dy
dt
¼ ft; yðÞ; yt¼ 0ðÞ¼y
0
;
into a diff erence equation, this time we replace the derivative term by the backward
finite difference formula (Equation (1.23)). In the subinterval t
k
; t
kþ1
½; the deriva-
tive dy=dt at the time point t
kþ1
is approximated as
Figure 7.4
Displacement and velocity trajectories for a sphere settling under gravity in Stokes flow. Euler’s explicit method is stable
but the velocity trajectory is not physically meaningful for the chosen step size of h =10μs.
0 0.05 0.1
0
1
2
3
4
5
6
× 10
−4
t (ms)
z (μm)
0 0.05 0.1
0
2
4
6
8
10
t (ms)
v (μm/s)
428
Numerical integration of ODEs

dy
dt
t¼t
kþ1
¼ fðt
kþ1
; y
kþ1
Þ
y
kþ1
y
k
h
;
where h ¼ t
kþ1
t
k
. Rearranging, we obtain Euler’s backward formula,
y
kþ1
¼ y
k
þ hf t
kþ1
; y
kþ1
ðÞ: (7:29)
This method assumes that the slope of the function yðtÞ in each subinterval is
approximately constant. This assumption is met if the step size h is small enough.
In this forward-marching scheme to solve for y
kþ1
, when y
k
is known, we need to
know the slope at y
kþ1
. But the value of y
kþ1
is unknown. A difference equation in
which unknown terms are located on both sides of the equation is called an implicit
equation. This can be contrasted with an explicit equation, in which the unknown
term is present only on the left-hand side of the difference equation. Therefore,
Euler’s backward method is sometimes called Euler’s implicit method.
To calculate y
kþ1
at each time step, we need to solve Equation (7.29) for y
kþ1
.If
the equation is linear or quadratic in y
kþ1
, then the terms of the equation can be
rearranged to yield an explicit equation in y
kþ1
. If the backwa rd difference equation
is nonlinear in y
kþ1
, then a nonlinear root-finding scheme must be used to obtain
y
kþ1
. In the latter case, the accuracy of the numerical solution is limited by both the
global truncation error of the ODE integration scheme as well as the truncation
error associated with the root-finding algorithm.
The order of the local truncation error of Euler’s implicit method is the same as
that for Euler’s explicit method, Oh
2
. Consider the subinterval t
0
; t
1
½. The initial
value of y at t
0
can be expanded in terms of the value of y at t
1
using the Taylor series:
yt
1
hðÞ¼yt
0
ðÞ¼yt
1
ðÞy
0
t
1
ðÞh þ
y
00
ξðÞh
2
2!
; ξ ∈ t
0
; t
1
½:
Rearranging, we get
yt
1
ðÞ¼y
0
þ hf t
1
; y
1
ðÞ
y
00
ξðÞh
2
2!
:
Figure 7.5
Displacement and velocity trajectories for a sphere settling under gravity in Stokes flow. Euler’s explicit method is stable
and physically meaningful for the chosen step size of h =1μs.
0 0.05 0.1
0
1
2
3
4
5
6
× 10
−4
t (ms)
z (μm)
0 0.05 0.1
0
1
2
3
4
5
6
7
t (ms)
v (μm/s)
429
7.2 Euler’s methods

Using Equation (7.29) (k ¼ 0) in the above expansion, we obtain
yt
1
ðÞ¼y
1
y
00
ξðÞh
2
2!
or
yt
1
ðÞy
1
¼
y
00
ξðÞh
2
2!
Oh
2
:
The global truncation error for Euler’s implicit scheme is one order of magnitude
lower than the local truncation error. Thus, the convergence rate for global trunca-
tion error is OðhÞ, which is the same as that for the explicit scheme.
An important difference between Euler’s explicit method and the implicit method
is the stability characteristics of the numerical solution. Let’s reconsider the first-
order decay problem,
dy
dt
¼λy; λ
4
0:
The num erical integration formula for this ODE problem, using Euler’s implicit
method, is found to be
y
kþ1
¼ y
k
λhy
kþ1
or
y
kþ1
¼
y
k
1 þ λh
: (7:30)
Note that the denominator of Equation (7.30) is greater than unity for any h >0.
Therefore, the numerical solution is guaranteed to mimic the decay of y with time for
any value of h > 0. This example illustrates a useful property of the Euler implicit
numerical scheme.
The Euler implicit numerical scheme is unconditionally stable. The numerical solution will not
diverge if the exact solution is bounded, for any value of h >0.
The global truncation error of the implicit Euler method at t
kþ1
is given by (see
Equation (7.20) for a comparison)
yt
kþ1
ðÞy
kþ1
1
1 h
∂f
∂y
yt
k
ðÞy
k
ðÞþ
Mh
2
2
:
The amplification factor for the global truncation error of Euler’s implicit method is
1= 1 h
∂f
∂y
.If∂f=∂y
5
0, i.e. the exact solution is a decaying function, the error is
clearly bounded, and the method is numerically stable for all h.
Example 7.3
The second-order differential equation describing the motion of a sphere settling under gravity in a viscous
medium is re-solved using Euler’s implicit formula. The two simultaneous first-order ODEs are linear. We
will be able to obtain an explicit formula for both y
1
and y
2
:
dy
1
dt
¼ y
2
; y
1
0ðÞ¼0; (7:27)
430
Numerical integration of ODEs
dy
2
dt
¼
ðρ
s
ρ
f
Þ
ρ
s
g
9μ
2a
2
ρ
s
y
2
; y
2
0ðÞ¼0: (7:28)
The numerical formulas prescribed by Euler’s backward difference method are
y
1;kþ1
¼ y
1;k
þ hy
2;kþ1
;
y
2;kþ1
¼ y
2;k
þ h
ðρ
s
ρ
f
Þ
ρ
s
g
9μ
2a
2
ρ
s
y
2;kþ1
:
The numerical algorithm used to integrate the coupled ODEs is
y
2;kþ1
¼
y
2;k
þ
ðρ
s
ρ
f
Þ
ρ
s
gh
1 þ
9μ
2a
2
ρ
s
h
;
y
1;kþ1
¼ y
1;k
þ hy
2;kþ1
:
Because of the implicit nature of the algorithm, a general purpose program cannot be written to solve ODEs
using an implicit algorithm. A MATLAB program was written with the express purpose of solving the
coupled ODEs using this algorithm. (Try this yourself.)
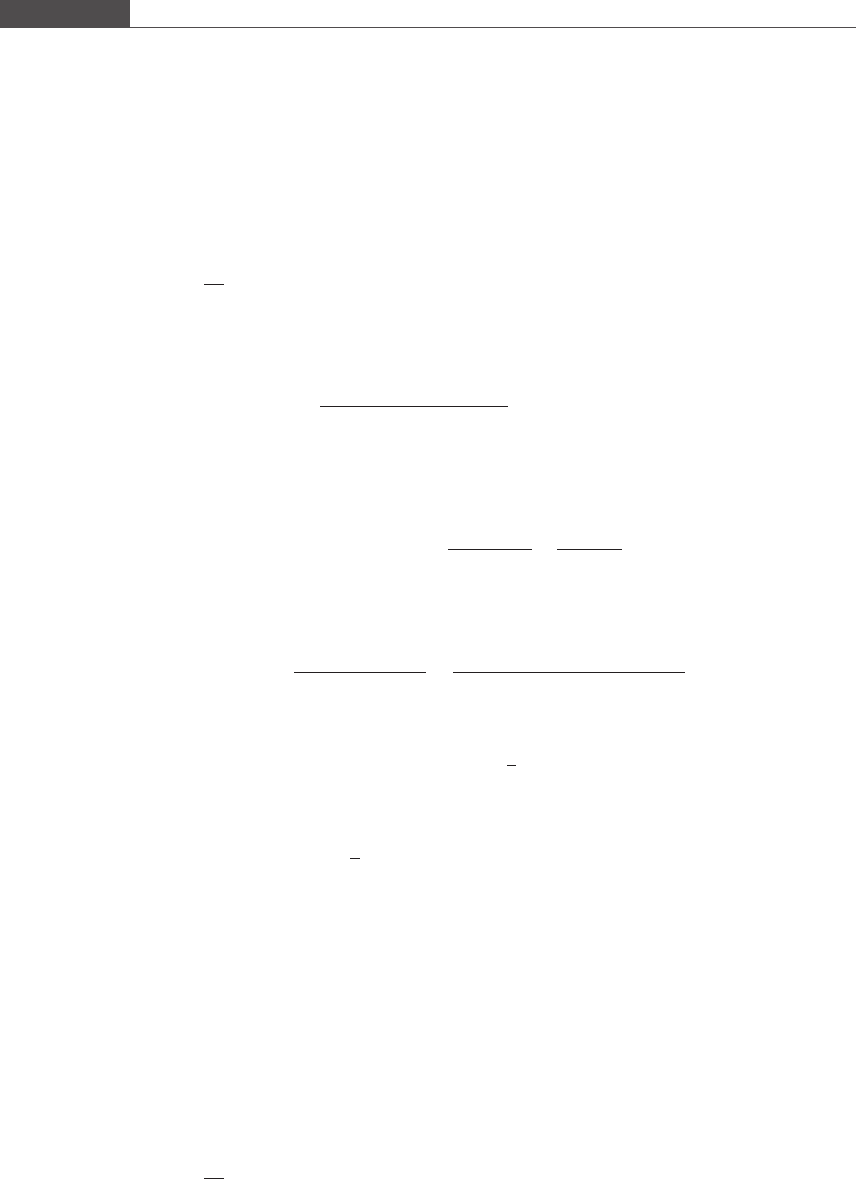
Keeping the constants the same, setting h = 0.0001 s, and plotting the numerical solution for the
displacement z and the velocity dz=dt with time (Figure 7.6), we observe that the solution is very well-
behaved. This example demonstrates that the stability characteristics of Euler’s backward method are
superior to those of Euler’s forward method.
7.2.3 Modified Euler’s method
The main disadvantage of Euler’s forward method and backward method is that
obtaining an accurate solution involves considerable computational effort. The accu-
racy of the numerical result (assuming round-off error is negligible compared to
truncation error) increases at the slow rate of OðhÞ. To reduce the error down to
acceptable values, it becomes necessary to work with very small step sizes. The
inefficiency in improving accuracy arises because of the crude approximation of
y
0
ðtÞ over the entire subinterval with a single value of fðt; yÞ calculated at either the
Figure 7.6
Displacement and velocity trajectories for a sphere settling under gravity in Stokes flow obtained using Euler’s backward
(implicit) method and a step size of h = 0.1 ms.
0 0.5 1
0
1
2
3
4
5
6
7
× 10
−3
t (ms)
z (μm)
0 0.5 1
0
1
2
3
4
5
6
7
t (ms)
v (μm/s)
431
7.2 Euler’s methods
beginning or end of the subinterval. However, y
0
ðtÞ is expected to change over an
interval of width h. What is more desirable when numerically integrating an ODE is to
use a value of the slope intermediate to that at the beginning and end of the subinterval
such that it captures the change in the trajectory of y over the subinterval.
The modified Euler method is a numerical ODE integration method that calculates
the slope at the beginning and end of the subinterval and uses the average of the two
slopes to increment the value of y at each time step. For the first-order ODE problem
given below,
dy
dt
¼ ft; yðÞ; y 0ðÞ¼y
0
;
the numerical integration algorithm is implicit. At time step t
kþ1
, the numerical
approximation to yt
kþ1
ðÞis y
kþ1
, which is calculated using the formula
y
kþ1
¼ y
k
þ h
ft
k
; y
k
ðÞþft
kþ1
; y
kþ1
ðÞ
2
: (7:31)
How quickly does the error diminish with a decrease in time step for the modified
Euler method? Consider the Taylor series expansion of yt
k
ðÞabout yt
kþ1
ðÞin the
subinterval ½t
k
; t
kþ1
:
yt
k
ðÞ¼yt
kþ1
ðÞy
0
t
kþ1
ðÞh þ
y
00
t
kþ1
ðÞh
2
2!
y
000
ξðÞh
3
3!
; ξ ∈ t
k
; t
kþ1
½:
Now, y
0
t
kþ1
ðÞ¼ft
kþ1
; yt
kþ1
ðÞðÞ, and y
00
t
kþ1
ðÞcan be approximated using the back-
ward finite difference formula:
y
00
t
kþ1
ðÞ¼
df t
kþ1
; yt
kþ1
ðÞðÞ
dt
¼
ft
kþ1
; yt
kþ1
ðÞðÞft
k
; yt
k
ðÞðÞ
h
þ OðhÞ:
Substituting into the expansion series, we obtain
yt
kþ1
ðÞ¼yt
k
ðÞþft
kþ1
; yt
kþ1
ðÞðÞh
h
2
ft
kþ1
; yt
kþ1
ðÞðÞft
k
; yt
k
ðÞðÞðÞþOh
3
:
Rearranging, we get
yt
kþ1
ðÞ¼yt
k
ðÞþ
h
2
ft
kþ1
; yt
kþ1
ðÞðÞþft
k
; yt
k
ðÞðÞðÞþOh
3
or
yt
kþ1
ðÞ
y
kþ1
Oh
3
:
The local truncation error for the modified Euler method is Oh
3
. The global
truncation error includes the accumulated error from previous steps and is one
order of magnitude smaller than the local error, and therefore is Oh
2
. The modified
Euler method is thus called a second-order met hod.
Example 7.4
We use the modified Euler method to solve the linear first-order ODE
dy
dt
¼ t y; y 0ðÞ¼1: (7:23)
The numerical integration formula given by Equation (7.31) is implicit in nature. Because Equation (7.23) is
linear, we can formulate an equation explicit for y
kþ1
:
432
Numerical integration of ODEs

y
kþ1
¼
2 hðÞy
k
þ hðt
k
þ t
kþ1
Þ
2 þ h
: (7:32)
Starting from t ¼ 0, we obtain approximations for yt
k
ðÞusing Equation (7.32). A MATLAB program was
written to perform numerical integration of Equation (7.23) using the algorithm given by Equation (7.32).
Equation (7.23) is also solved using Euler’s forward method and Euler’s backward method. The numerical
result at t
f
¼ 2:8 is tabulated in Table 7.2 for the three different Euler methods and three different step
sizes. The exact solution for yð2:8Þ is 1.9216. The maximum global truncation error encountered during
ODE integration is presented in Table 7.3.
Table 7.3 shows that the global error is linearly dependent on step size for both the forward method and
the backward method. When h is halved, the error also reduces by half. However, global error reduction is
Oh
2
for the modified Euler method. The error decreases by roughly a factor of 4 when the step size is cut
in half. The modified Euler method is found to converge on the exact solution more rapidly than the other
two methods, and is thus more efficient.
Let us consider the stability properties of the implicit modified Euler method for the
first-order decay problem:
dy
dt
¼λy; λ
4
0:
The step-wise numerical integration formula for this ODE problem is
y
kþ1
¼ y
k
þ h
λ y
k
þ y
kþ1
ðÞ
2
or
y
kþ1
¼
ð2 λhÞy
k
2 þ λh
: (7:33)
Table 7.2. Numeri cal solution of yðtÞ at t
f
¼ 2:8 obtained using three
different Euler schemes for solving Equation (7.23)
h
Euler’s forward
method
Euler’s backward
method
Modified Euler
method
0.4 1.8560 1.9897 1.9171
0.2 1.8880 1.9558 1.9205
0.1 1.9047 1.9387 1.9213
Table 7.3. Maximum global truncation error observed when using
three different Euler schemes for solving Equation (7.23)
h
Euler’s forward
method
Euler’s backward
method
Modified Euler
method
0.4 0.1787 0.1265 0.0098
0.2 0.0804 0.068 0.0025
0.1 0.0384 0.0353 0.000614
433
7.2 Euler’s methods
Equation (7.33) guarantees decay of y with time for any h > 0. The numerical
scheme is unconditionally stable for this problem . This is another example demon-
strating the excellent stability characteristics of implicit numerical ODE integration
methods.
7.3 Runge–Kutta (RK) methods
The Runge–Kutta (RK) methods are a set of explicit higher-order ODE solvers.
The modified Euler method discussed in Section 7.2.3 was an implicit second-order
method that requires two slope evaluations at each time step. By doubling the
number of slope calculations in the interval, we were able to increase the order of
accuracy by an order of magnitude from OðhÞ, characteristic of Euler’s expli cit
method, to Oh
2
for the modified Euler method. This direct correlation between
the number of slope evaluations and the order of the method is exploi ted by the
RK methods. Instead of calculating higher-order derivatives of y, RK numerical
schemes calculate the slope fðt; yÞ at specific points within each subinterval and
then combine them according to a specific rule. In this manner, the RK techniques
have a much faster error convergence rate than first-order schemes, yet require
evaluations only of the first derivative of y. This is one reason why the RK
methods are so popular.
The RK methods are easy to use because the formulas are explicit. However, their
stability characteristics are only slightly better than Euler’s explicit method.
Therefore, a stable solution is not guaranteed for all values of h. When the RK
numerical scheme is stable for the chosen value of h, sub sequent reductions in h lead
to rapid convergence of the numerical approximation to the exact solution. The
convergence rate depends on the order of the RK method. The order of the method is
equal to the number of slope evaluations combined in one time step, when the
number of slopes evaluated is two, three, or four. When the slope evaluations at
each time step exceed four, the correlation between the order of the method and the
number of slopes combined is no longer one-to-one. For example, a fifth-order RK
method requires six slope evaluations at every time step.
3
In this section, we intro-
duce second-order (RK-2) and fourth-order (RK-4) methods.
7.3.1 Second-order RK methods
The second-order RK method is, as the name suggests, second-order accurate, i.e.
the global truncation error associated with the numerical solution is Oh
2
. This
explicit ODE integration scheme requires slope evaluations at two points within
each time step. If k
1
and k
2
are the slope function s evaluated at two distinct time
points within the subinterval t
k
; t
kþ1
½, then the general purpose formula of the
RK-2 method is
y
kþ1
¼ y
k
þ hc
1
k
1
þ c
2
k
2
ðÞ;
k
1
¼ ft
k
; y
k
ðÞ; (7:34)
k
2
¼ ft
k
þ p
2
h; y
k
þ q
21
k
1
hðÞ:
3
RK methods of order greater than 4 are not as computationally efficient as RK-4 methods.
434
Numerical integration of ODEs

The values of the constants c
1
; c
2
; p
2
; and q
21
are determined by mathematical
constraints, or rules, that govern this second-order method. Let’s investigate these
rules now.
We begin with the Taylor series expansion for yt
kþ1
ðÞexpanded about yt
k
ðÞusing
a step size h:
yt
kþ1
ðÞ¼yt
k
ðÞþy
0
t
k
ðÞh þ
y
00
t
k
ðÞh
2
2!
þ Oh
3
:
The second derivative, y
00
tðÞ, is the first derivative of fðt; yÞ and can be expressed in
terms of partial derivatives of fðt; yÞ:
y
00
tðÞ¼f
0
t; yðÞ¼
∂ft; yðÞ
∂t
þ
∂ft; yðÞ
∂y
dy
dt
Substituting the expansion for y
00
t
k
ðÞinto the Taylor series expansion, we obtain a
series express ion for the exact solution at t
kþ1
:
yt
kþ1
ðÞ¼yt
k
ðÞþft
k
; y
k
ðÞh þ
h
2
2
∂ft; yðÞ
∂t
þ
∂ft; yðÞ
∂y
ft
k
; y
k
ðÞ
þ Oh
3
: (7:35)
To find the values of the RK constants, we must compare the Taylor series expansion
of the exact solution with the numerical approximation provided by the RK-2
method. We expand k
2
in terms of k
1
using the two-dimensional Taylor series:
k
2
¼ ft
k
; y
k
ðÞþp
2
h
∂ft
k
; y
k
ðÞ
∂t
þ q
21
k
1
h
∂ft
k
; y
k
ðÞ
∂y
þ Oh
2
:
Substituting the expressions for k
1
and k
2
into Equations (7.34) for y
kþ1
, we obtain
y
kþ1
¼ y
k
þ hc
1
ft
k
; y
k
ðÞþc
2
ft
k
; y
k
ðÞð
þc
2
p
2
h
∂ft
k
; y
k
ðÞ
∂t
þ c
2
q
21
hf t
k
; y
k
ðÞ
∂ft
k
; y
k
ðÞ
∂y
þ Oh
2
or
y
kþ1
¼ y
k
þ ft
k
; y
k
ðÞc
1
þ c
2
ðÞh þ h
2
c
2
p
2
∂ft
k
; y
k
ðÞ
∂t
þ c
2
q
21
∂ft
k
; y
k
ðÞ
∂y
ft
k
; y
k
ðÞ
þ Oh
3
:
(7:36)
Comparison of Equations (7.35) and (7.36) yields three rules governing the RK-2
constants:
c
1
þ c
2
¼ 1;
c
2
p
2
¼
1
2
;
c
2
q
21
¼
1
2
:
For this set of three equations in four variables, an infinite number of solutions exist.
Thus, an infinite number of RK−2 schemes can be devised. In practice, a family of
RK-2 methods exists, and we discuss two of the most common RK-2 schemes: the
explicit modified Euler method and the midpoint method.
435
7.3 Runge–Kutta (RK) methods
Modified Euler method (explicit)
This numerical scheme is also called the trapezoidal rule and Heun’s method.It
uses the same numerical integration formula as the implicit modified Euler
method discussed in Section 7.2.3. However, the algori thm used to calculate
the slope of y at t
kþ1
is what sets this method apart from the one discussed
earlier.
Setting c
2
¼ 1=2, we obtain the following values for the RK−2 parameters:
c
1
¼
1
2
; p
2
¼ 1; q
21
¼ 1:
Equations (7.34) simplify to
y
kþ1
¼ y
k
þ
h
2
k
1
þ k
2
ðÞ;
k
1
¼ ft
k
; y
k
ðÞ; (7:37)
k
2
¼ ft
k
þ h; y
k
þ k
1
hðÞ:
This RK−2 method is very sim ilar to the implicit modified Euler method. The
only difference between this integration scheme and the implicit second-or der
method is that he re the value of y
kþ1
on the right-hand side of the equation is
predicted using Euler’s explicit method, i.e. y
kþ1
¼ y
k
þ hk
1
. With replacement of
the right-hand side term y
kþ1
with known y
k
terms, the integration method is
rendered explicit. The global error for the explicit modified Euler method is still
Oh
2
; however, the actual error may be slightly larger in magnitude than that
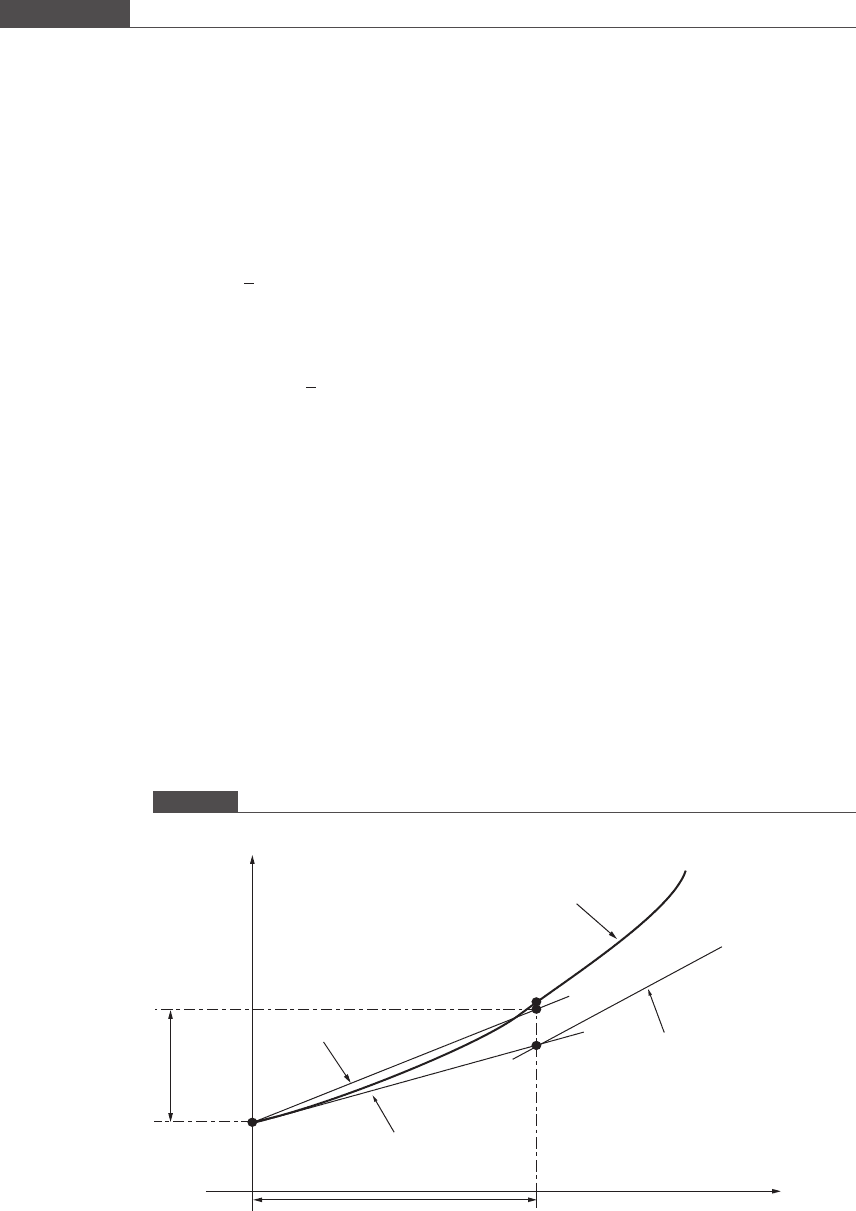
generated by the implicit method. Figure 7.7 illustrates the geometric interpreta-
tion of Equations (7.37).
Figure 7.7
Numerical integration of an ODE using the explicit modified Euler method.
0
y
0
t
y
t
1
h
y
1
y(t
1
)
slope: k
1
= f(t
0
, y
0
)
slope: k
2
= f(t
1
, y
0
+ hf(t
0
, y
0
))
h(k
1
+ k
2
)/2
y(t)
Exact solution
slope = ½(k
1
+ k
2
)
436
Numerical integration of ODEs