King M.R., Mody N.A. Numerical and Statistical Methods for Bioengineering: Applications in MATLAB
Подождите немного. Документ загружается.

constraining value of y will lie either at the initial point or the final point of the
integration interval. If the constraint provided is at the final or end time t
f
, i.e.
yt
f
ðÞ¼y
f
, then the ODE integration proceeds backward in time from t
f
to zero,
rather than forward in time. However, this problem is mathematically equivalent to
an IVP with the constraint provided at t =0.
To perform numerical ODE integration, the interval ½0; t
f
of integration must be
divided into N subint ervals of equal size. The size of one subinterval is called the step
size, and is represented by h. We will co nsider ODE integration with varying step
sizes in Section 7.4. Thus, the interval is discretized into N ¼ t
f
=h þ 1 points, and the
differential equation is solved only at those points . The ODE is integrated using a
forward-marching numerical scheme. The solution yðtÞ is calculated at the endpoint
of each subinterval, i.e. at t ¼ t
1
; t
2
; ...; t
f
, in a step-wise fashion. The numerical
solution of y is therefore not continuous, but, with a small enough step size, the
solution will be sufficiently descriptive and reasonably accurate.
7.2.1 Euler’s forward method
In Euler’s explicit method, h is chosen to be small enough such that the slope of the
function yðtÞ within any subinterval remains approximately constant. Using the
first-order forward finite difference formula (see Section 1.6.3 for a discus sion on
finite difference form ulas and numerical differentiation) to approximate a first-order
derivative, we can rewrite dy=dt within the subinterval ½t
0
; t
1
in terms of a numerical
derivative:
dy
dt
t
0
¼0
¼ fð0; y
0
Þ
y
1
yð0Þ
t
1
0
¼
y
1
y
0
h
:
The above equation is rearranged to obtain
y
1
¼ y
0
þ hfð0; y
0
Þ:
Here, we have converted a differential equation into a difference equation that allows
us to calculate the value of y at time t
1
, using the slope at the previous point t
0
.
Because the forward finite difference is used to derive the difference equation, this
method is also commonly known as Euler’s forward method. Note that y
1
is not the
same as yt
1
ðÞ; y
1
is the approximate (or numerical) solution of y at t
1
. The exact or
true solution of the ODE at t
1
is denoted as yt
1
ðÞ. The difference equation is
inherently associated with a truncation error (called the local truncation error)
whose order of magnitude we will determine shortly.
Euler’s forward method assumes that the slope of the y trajectory is constant
within the subinterval and is equal to the initial slope. If the step size is sufficiently
small and/or the slope changes slowly, then the assum ption is acceptable and the
error that is generated by the numerical approximation is small. If the trajectory
curves sharply within the subint erval, the constancy of slope assumption is invalid
and a large numerical error will be produced by this difference equation.
Because the values on the right-hand side of the above difference equation are
specified by the initial condition and are therefore known to us, the solution technique
is said to be explicit,allowingy
1
to be calculated directly. Once y
1
is calculated, we can
obtain the approximate solution y
2
for y at t
2
, which is calculated as
y
2
¼ y
1
þ hf t
1
; y
1
ðÞ:
417
7.2 Euler’s methods
Since y
1
is the approximate solution for yt
1
ðÞ, errors involved in estimating yt
1
ðÞwill
be included in the estimate for yt
2
ðÞ. Thus, in addition to the inherent truncation
error at the present step associated wi th using the numerical derivative approxima-
tion, we also observe a propagation of previous errors as we march forward from
t =0 to t = t
f
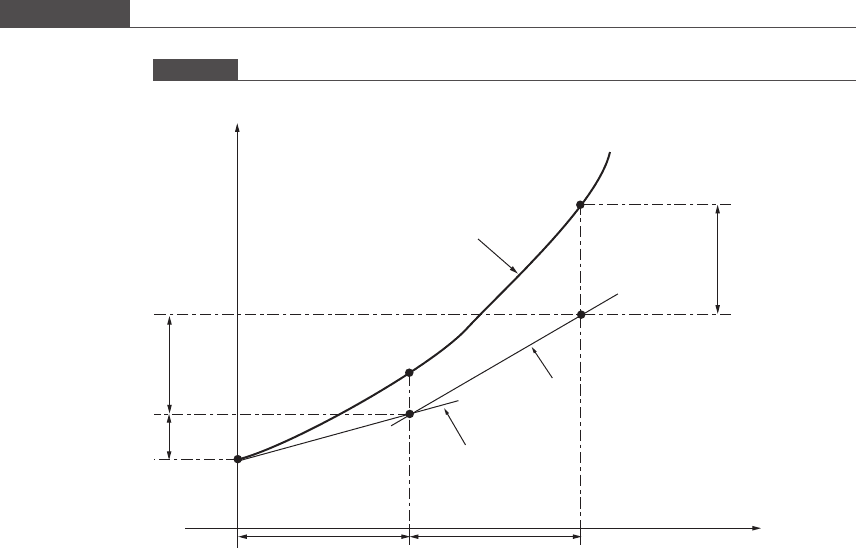
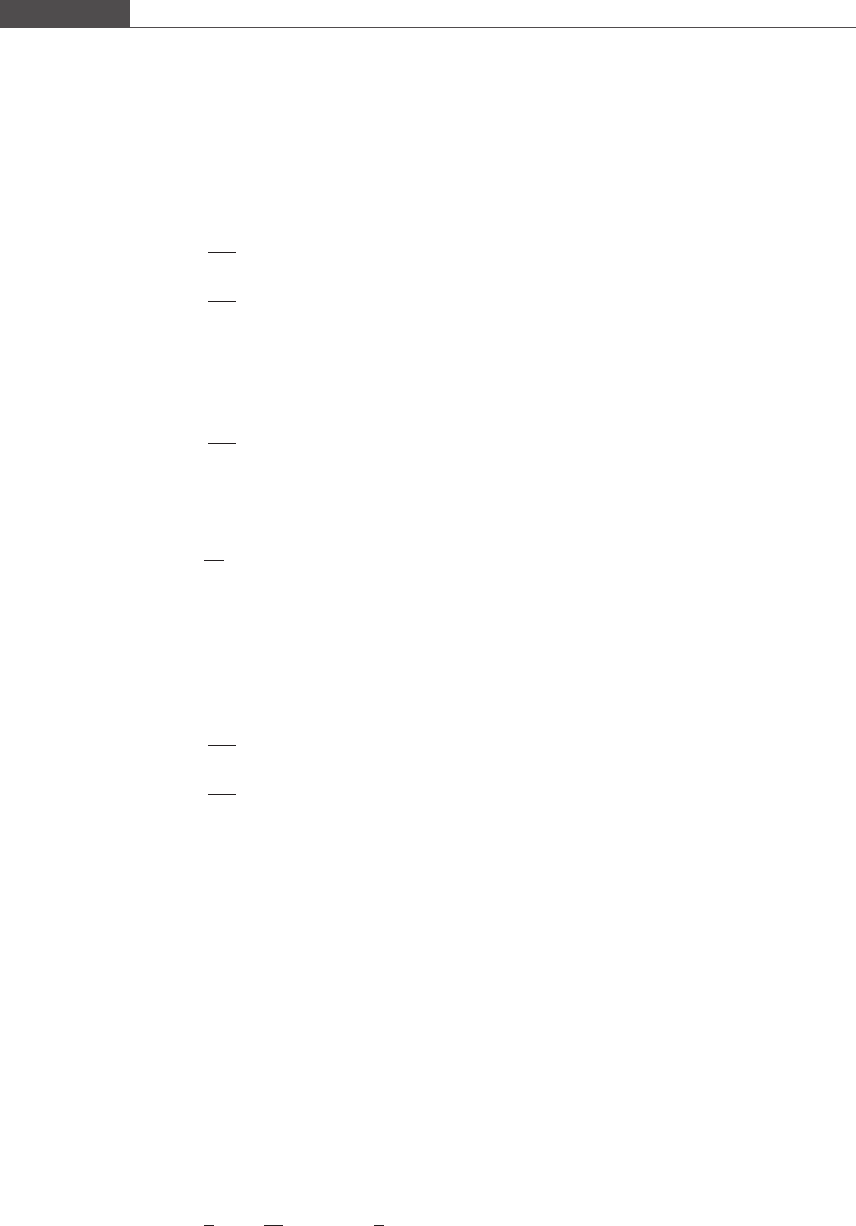
. Figure 7.1 illustrates the step-wise marching technique used by
Euler’s method to find the approximate solution, at the first two time points of the
discretized interval.
We can generalize the above equation for any subinterval ½t
k
; t
kþ1
, where k =0,
1, 2, 3, ..., N − 1 and t
kþ1
t
k
¼ h:
y
kþ1
¼ y
k
þ hf t
k
; y
k
ðÞ: (7:15)
Note that, while the true solution yðtÞ is continuous, the numerical solution,
y
1
; y
2
; ...; y
k
; y
kþ1
; ...; y
N
, is discrete.
Local and global truncation errors
Let us now assess the magnitude of the truncation error involved with Euler’s
explicit method. There are two types of errors produced by an ODE numeri cal
integration scheme. The first type of error is the local truncation error that is
generated at every step. The local truncation error generated in the first step is
carried forward to the next step and thereby propagates through the numerical
solution to the final step. As each step produces a new local truncation error, these
errors accumulate as the numerical calculation progresses from one iteration to the
next. The total error at any step, which is the sum of the local truncation error and
the propagated errors, is called the global truncation error.
Figure 7.1
Numerical integration of an ODE using Euler’s forward method.
0
y
0
t
y
t
1
h
y
1
y(
t
1
)
slope = f(0, y
0
)
hf(0, y
0
)
slope = f(
t
1
, y
1
)
y(
t
2
)
y
2
hf(
t
1
, y
1
)
Truncation error
at
t
2
t
2
h
y(t)
Exact solution
418
Numerical integration of ODEs

When we perform the first step of the numerical ODE integration, the starting
value of y is know n exactly. We can express the exact solution at t ¼ t
1
in terms of the
solution at t
0
using the Taylor series (see Section 1.6 for a discussion on Taylor
series) as follows:
yt
1
ðÞ¼yt
0
ðÞþy
0
t
0
ðÞh þ
y
00
ξðÞh
2
2!
; ξ 2 t
0
; t
1
½:
The final term on the right-hand side is the remainder term discussed in Section 1.6.
Here, the remainder term is the sum total of all the terms in the infinite series except
for the first two. The first two terms on the right-hand side of the equation are
already known:
yt
1
ðÞ¼y
0
þ hfð0; y
0
Þþ
y
00
ξðÞh
2
2!
or
yt
1
ðÞ¼y
1
þ
y
00
ξðÞh
2
2!
:
Therefore,
yt
1
ðÞy
1
¼
y
00
ξðÞh
2
2!
:
If y
00
ðtÞ
jj
M for 0 t t
f
, then
yt
1
ðÞy
1
Mh
2
2!
Oh
2
: (7:16)
The order of magnitude of the local truncation error associated with the numerical
solution of y at t
1
is h
2
. For the first step, the local truncation error is equal to the
global truncation error. The local truncation error generated at each step is Oh
2
.
For the second step, we express yt
2
ðÞ
in terms of the exact solution at the previous
step,
yt
2
ðÞ¼yt
1
ðÞþhf t
1
; yt
1
ðÞðÞþ
y
00
ξðÞh
2
2!
; ξ 2 t
1
; t
2
½:
Since yt
1
ðÞis unknown, we must use y
1
in its place. The truncation error associated
with the numerical solution for yt
2
ðÞis equal to the sum of the local truncation error,
y
00
ξðÞh
2
=2!, generated at this step, the local truncation error associated with y
1
, and
the error in calculating the slope at t
1
, i.e. ft
1
; yt
1
ðÞðÞft
1
; y
1
ðÞ. At the (k + 1)th step,
the true solution yt
kþ1
ðÞis expressed as the sum of terms involving yt
k
ðÞ:
yt
kþ1
ðÞ¼yt
k
ðÞþhf t
k
; yt
k
ðÞðÞþ
y
00
ξðÞh
2
2!
; ξ 2 t
k
; t
kþ1
½: (7:17)
Subtracting Equation (7.15) from Equation (7.17), we obtain the global truncation
error in the numerical solution at t
kþ1
:
yt
kþ1
ðÞy
kþ1
¼ yt
k
ðÞy
k
þ hft
k
; yt
k
ðÞðÞft
k
; y
k
ðÞðÞþ
y
00
ξðÞh
2
2!
: (7 :18)
We use the mean value theorem to simplify the above equation. If fðyÞ is continuous
and differentiable within the interval y 2½a; b, then the mean value theorem states
that
419
7.2 Euler’s methods

fbðÞfðaÞ
b a
¼
dfðyÞ
dy
y¼c
; (7:19)
where c is a number within the interval ½a; b. In other words, the slope of the line
joining the endpoints of the interval a; faðÞðÞand b; fbðÞðÞis equal to the derivative of
fðyÞ at the point c , which lies within the same interval.
Applying the mean value theorem (Equation (7.19))toEquation (7.18), we obtain
yt
kþ1
ðÞy
kþ1
¼ yt
k
ðÞy
k
þ h
∂ft
k
; cðÞ
∂y
yt
k
ðÞy
k
ðÞþ
y
00
ξðÞh
2
2!
or
yt
kþ1
ðÞy
kþ1
¼ 1 þ h
∂ft
k
; cðÞ
∂y
yt
k
ðÞy
k
ðÞþ
y
00
ξðÞh
2
2!
:
If y
00
ðtÞ
jj
M for 0 t t
f
, ∂ft; yðÞ=∂y
jj
C for 0 t t
f
and a y b (also
called the Lipschitz criterion), then
2
yt
kþ1
ðÞy
kþ1
1 þ hCðÞyt
k
ðÞy
k
ðÞþ
Mh
2
2
: (7:20)
Now, yt
k
ðÞy
k
is the global truncation error of the numerical solution at t
k
. Since
Equation (7.20) is valid for k 1, we can write
yt
k
ðÞy
k
1 þ hCðÞyt
k1
ðÞy
k1
ðÞþ
Mh
2
2
:
Substituting the above expression into Equation (7.19), we get
yt
kþ1
ðÞy
kþ1
1 þ hCðÞ1 þ hCðÞyt
k1
ðÞy
k1
ðÞþ
Mh
2
2
þ
Mh
2
2
or
yt
kþ1
ðÞy
kþ1
1 þ hCðÞ
2
yt
k1
ðÞy
k1
ðÞþ1 þ 1 þ hCðÞðÞ
Mh
2
2
:
Performing the substitutions for the global truncation error at t
k1
; t
k2
; ...; t
2
recursively, we obtain
yt
kþ1
ðÞy
kþ1
1 þ hCðÞ
k
yt
1
ðÞy
1
ðÞ
þ 1 þ 1 þ hCðÞþ1 þ hCðÞ
2
þþ 1 þ hCðÞ
k1
Mh
2
2
;
yt
1
ðÞy
1
is given by Equation (7.16) and only involves the local truncation error.
The equation above becomes
yt
kþ1
ðÞy
kþ1
1 þ 1 þ hCðÞþ1 þ hCðÞ
2
þþ 1 þ hCðÞ
k1
þ 1 þ hCðÞ
k
Mh
2
2
:
The sum of the geometric series 1 þ r þ r
2
þþr
n
is ðr
nþ1
1Þ=ðr 1Þ, and we use
this result to simplify the above to
2
C is some constant value and should not be confused with c, which is a point between a and b on the
y-axis.
420
Numerical integration of ODEs

yt
kþ1
ðÞy
kþ1
1 þ hCðÞ
kþ1
1
1 þ hCðÞ1
Mh
2
2
: (7:21)
Using the Taylor series, we can expand e
hC
as follows:
e
hC
¼ 1 þ hC þ
hCðÞ
2
2!
þ
hCðÞ
3
3!
þ:
Therefore,
e
hC
4
1 þ hC:
Substituting the above into 7.21,
yt
kþ1
ðÞy
kþ1
5
e
hðkþ1ÞC
1
hC
Mh
2
2
If k þ 1 ¼ N, then hN ¼ t
f
, and the final result for the global truncation error at t
f
is
yt
N
ðÞy
N
5
e
t
f
C
1
Mh
2C
OhðÞ: (7:22)
The most important result of this derivation is that the global truncation error of
Euler’s forward method is OhðÞ. Euler’s forward method is called a first-order method.
Note that the order of magnitude of the global truncation error is one order less than
that of the local truncation error. In fact, for any numerical ODE integration
technique, the global truncation error is one order of magnitude less than the local
truncation error for that method.
Example 7.1
We use Euler’s method to solve the linear first-order ODE
dy
dt
¼ t y; y 0ðÞ¼1: (7:23)
The exact solution of Equation (7.23) is y ¼ t 1 þ 2e
t
, which we will use to compare with the
numerical solution.
To solve this ODE, we create two m-files. The first is a general purpose function file named
eulerforwardmethod.m that solves any first-order ODE using Euler’sexplicitmethod.Thesecondisa
function file named simplelinearODE.m that evaluates fðt; yÞ, i.e. the right-hand side of the ODE
specified in the problem statement. The name of the second function file is supplied to the first function.
The function feval (see Chapter 5 for usage) is used to pass the values of t and y to
simplelinearODE.m and calculate ft; yðÞat the point t; yðÞ.
MATLAB program 7.1
function [t, y] = eulerforwardmethod(odefunc, tf, y0, h)
% Euler’s forward method is used to solve a first-order ODE
% Input variables
% odefunc : name of the function that calculates f(t, y)
%tf:final time or size of interval
% y0 : y(0)
% h : step size
% Output variables
421
7.2 Euler’s methods
t = [0:h:tf]; % vector of time points
y = zeros(size(t)); % dependent variable vector
y(1) = y0; % indexing of vector elements begins with 1 in MATLAB
% Euler’s forward method for solving a first-order ODE
for k = 1:length(t)-1
y(k+1) = y(k)+ h*feval(odefunc, t(k), y(k));
end
MATLAB program 7.2
function f = simplelinearODE(t, y)
% Evaluate slope f(t,y) =t-y
f=t-y;
MATLAB program 7.1 can be called from the command line
44
[t, y] = eulerforwardmethod(‘simplelinearODE’, 3, 1, 0.5)
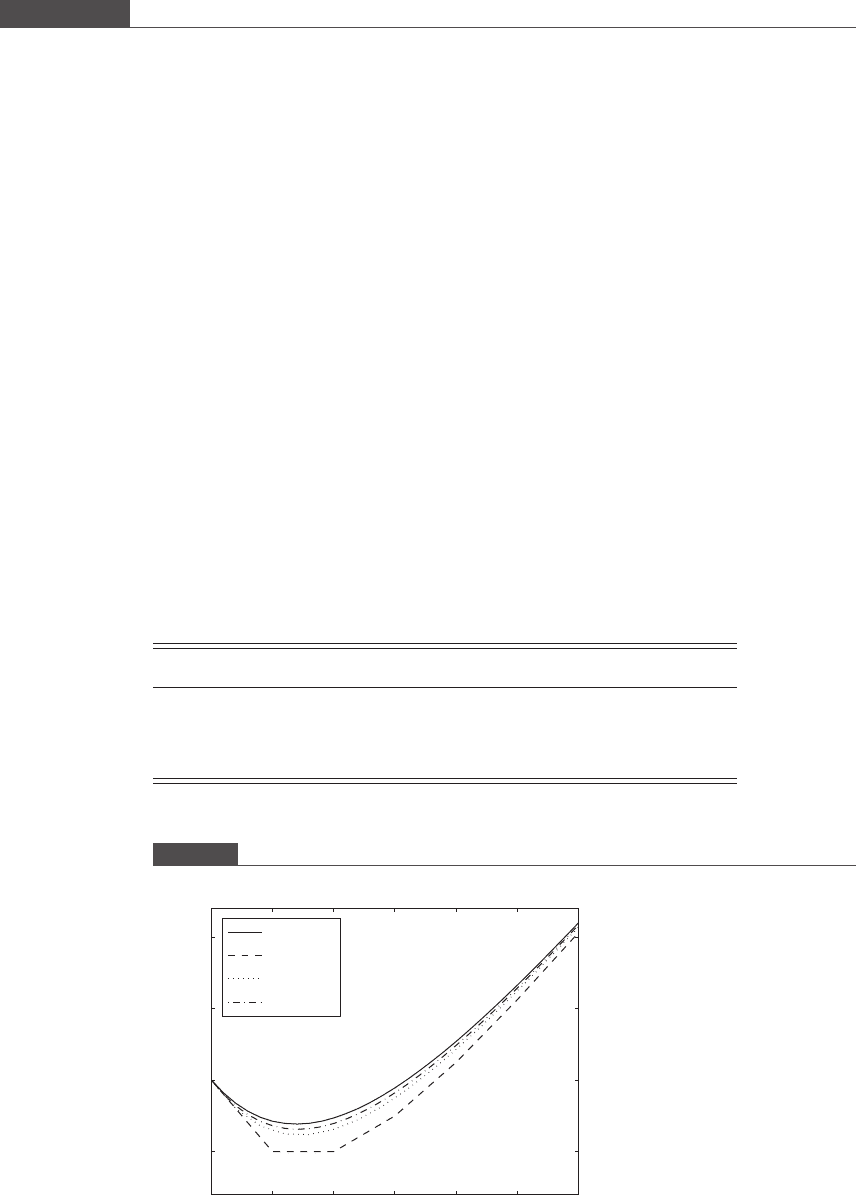
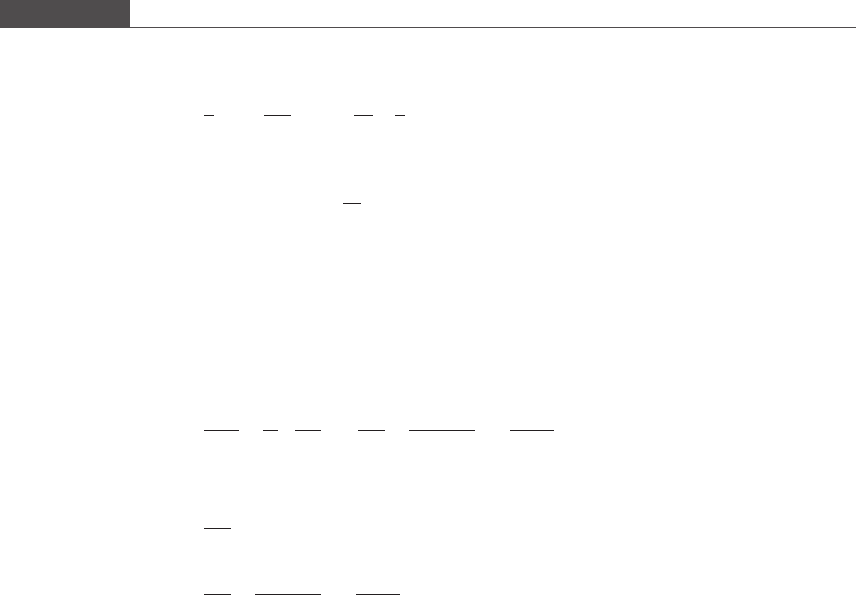
Figure 7.2 shows the trajectory of y obtained by the numerical solution with step sizes h = 0.5, 0.2, and
0.1, and compares this with the exact solution.
We see from the figure that the accuracy of the numerical scheme increases with decreasing h. The
maximum global truncation error for each trajectory is shown in Table 7.1.
Figure 7.2
Numerical solution of Equation (7.23) using Euler’s forward method for three different step sizes.
0 0.5 1 1.5 2 2.5 3
0.5
1
1.5
2
t
y
Exact y(t)
h = 0.5
h = 0.2
h = 0.1
Table 7.1. Change in maximum global truncation error with step size
Numerical solution Step size Maximum global truncation error
1 0.5 0.2358
2 0.2 0.0804
3 0.1 0.0384
422
Numerical integration of ODEs
For a decrease in step size of 0:2=0:5 ¼ 0:4, the corresponding decrease in maximum global
truncation error is 0:0804=0:2358 ¼ 0:341. The global error is reduced by the same order of
magnitude as the step size. Similarly, a decrease in step size of 0:1=0:2 ¼ 0:5 produces a decrease in
maximum global truncation error of 0:0384=0:0804 ¼ 0:478. The maximum truncation error reduces
proportionately with a decrease in h. Thus, the error convergence to zero is observed to be O(h), as
predicted by Equation (7.22). Therefore, if h is cut by half, the total truncation error will also be reduced by
approximately half.
Stability issues
Let us consider the simple first-order ODE
dy
dt
¼ λy; y 0ðÞ¼α: (7:24)
The exact solution of Equation (7.24) is y ¼ αe
λt
. We can use the exact solution to
benchmark the accuracy of Euler’s forward method and ch aracterize the limitations
of this method. The time interval over which the ODE is integrate d is divided into N
equally spaced time points. The uniform step size is h.
At t ¼ t
1
, the numerical solution is
y
1
¼ y 0ðÞþhλy 0ðÞ¼α þ hλα ¼ α 1 þ λhðÞ:
At t ¼ t
2
,
y
2
¼ y
1
þ hλy
1
¼ 1 þ λhðÞy
1
¼ α 1 þ λhðÞ
2
:
At t ¼ t
k
,
y
kþ1
¼ 1 þ λhðÞy
k
¼ α 1 þ λhðÞ
kþ1
:
And at t ¼ t
N
,
y
N
¼ α 1 þ λhðÞ
N
: (7:25)
Fortunately, for this problem, we have arrived at a convenient expression for the
numerical solut ion of y at any time t. We use this simple expression to illustrate a few
basic concepts about Euler’s method. If the step size h ! 0, the number of incre-
ments N ! ∞.
The expression in Equation (7.25) can be expanded using the binomial theorem as
follows:
1 þ λhðÞ
N
¼ 1
N
þ Nλ
t
f
N
1
N1
þ
NN 1ðÞ
2!
λ
t
f
N
2
1
N2
þ;
where h ¼ t
f
=N. When N ! ∞, h ! 0, and λh 1: The above expression becomes
1 þ λhðÞ
∞
1 þ λt
f
þ
λt
f
ðÞ
2
2!
þ¼e
λt
f
:
Therefore,
y
t
f
¼ αe
λt
f
:
When h ! 0, the numerical solution approaches the exact solution. This example
shows that for a very small step size, Euler’s method will converge upon the true
solution. For very small h, a large number of steps must be taken before the end of
the interval is reached. A very large value of N has several disadvantages: (1) the
423
7.2 Euler’s methods
method becomes computationally expensive in terms of the number of required
operations; (2) round-off errors can dominate the total error and any improvement
in accuracy is lost; (3) round-off errors will accumulate and become relatively large
because now many, many steps are involved. This will corrupt the final solution at
t ¼ t
f
.
What happens when h is not small enough? Let’s first take a closer look at the
exact solution. If λ
4
0, the true solution blows up at large times and y ! ∞. We are
not interested in the unstable problem. We consider only those situations in which
λ
5
0. For these values of λ the solution decays with time to zero. Examples of
physical situations in which this equation applies are radioactive decay, drug elim-
ination by the kidneys, and first-order (irreversible) consumption of a chemical
reactant.
In a first-order decay problem,
dy
dt
¼λy; λ
4
0: yð0Þ
4
0
According to the exact solution, it is always the case that yt
2
ðÞ
5
yðt
1
Þ, where t
2
4
t
1
.
The numerical solution of this ODE problem is y
kþ1
¼ 1 λhðÞy
k
.When
1 λh
jj
5
1, then we will always have y
kþ1
5
y
k
. To achieve a decaying solution, h
must be constrained to the range 1
5
1 λh
5
1or0
5
h
5
2=λ. Note that h is always
positive in a forward-marching scheme, so the condition that assures a decaying
numerical solution is h
5
2=λ.If0
5
h
5
1=λ, then the decay is monotonic. If
1=λ
5
h
5
2=λ, an oscillatory decay is observed. What happens when h ¼ 1=λ?If
h ¼ 2=λ, then the numerical solution does not decay but instead oscillates from α
to α at every time step.
When h 2=λ, the numerical solution is bounded and the numerical solution is said
to be stable over this range of step size values. The accuracy of the solution will depend
on the size of h.Whenh
4
2=λ, the numerical solution diverges with time with sign
reversal at each step and tends towards infinity. The solution blows up because the
errors grow (as opposed to decay) exponentially and cause the solution to blow up. For
this range of h values, the numerical solution is unstable. The magnitude of λ defines the
upper bound for the step size. A large λ requires a very small h to ensure stability of the
numerical technique. However, if h is too small, then the limits of numerical precision
may be reached and round-off error will preclude any improvement in accuracy.
The stability of numerical integration is determined by the ODE to be solved, the
step size,
and the numerical integration scheme. We explore the stability limits of
Euler’s method by looking at how the error accumulates with each step. Equation
(7.20) express es the global truncation error at t
kþ1
in terms of the error at t
k
:
yt
kþ1
ðÞy
kþ1
1 þ h
∂f
∂y
yt
k
ðÞy
k
ðÞþ
Mh
2
2
: (7:20)
Note that the global error at t
k
, which is given by yt
k
ðÞy
k
, is multiplied by an
amplification factor, which for Euler’s forward method is 1 þ hð∂f=∂yÞ.Ifð∂f=∂y Þ is
positive, then 1 þ h ð∂f=∂yÞ
4
1, and the global error will be amplified regardless of
the step size. Even if the exact solution is bounded, the numerical solution may
accumulate large errors along the path of integrati on. If ð∂f=∂yÞ is negative and h is
chosen such that 1 1 þ h ð∂f=∂yÞ
5
1, then the error remains bounded for all
times within the time interval. However, if ð∂f=∂yÞ is very negative, then ð∂f=∂yÞjj
is large. If h is not small enou gh, then 1 þ hð∂f=∂yÞ
5
1orhð∂f=∂yÞ
5
2. The
errors
will be magnified at each step, and the numerical method is rendered unstable.
424
Numerical integration of ODEs
ODEs for which df t; yðÞ=dy 1 over some of the time interval are called stiff
equations. Section 7.6 discusses this topic in detail.
Coupled ODEs
When two or more first-order ODEs are coup led, the set of differential equations are
solved simultaneously as a system of first-order ODEs as follows:
dy
1
dt
¼ f
1
t; y
1
; y
2
; ...; y
n
ðÞ
dy
2
dt
¼ f
2
t; y
1
; y
2
; ...; y
n
ðÞ
:
:
:
dy
n
dt
¼ f
n
t; y
1
; y
2
; ...; y
n
ðÞ:
A system of ODEs can be represented compactly using vector notation. If
y ¼½y
1
; y
2
; ...; y
n
and f ¼½f
1
; f
2
; ...; f
n
, then we can write
dy
dt
¼ f t; yðÞ; y 0ðÞ¼y
0
; (7:26)
where the bold notation represents a vector (lower-case) or matrix (upper-case)
(notation to distinguish vectors from scalars is discussed in Section 2.1) as opposed
to a scalar.
A set of ODEs can be solved using Euler’s explicit formula. For a three-variable
system,
dy
1
dt
¼ f
1
t; y
1
; y
2
ðÞ; y
1
0ðÞ¼y
1;0
;
dy
2
dt
¼ f
2
t; y
1
; y
2
ðÞ; y
2
0ðÞ¼y
2;0
;
the numerical formula prescribed by Euler’s method is
y
1;kþ1
¼ y
1;k
þ hf
1
t
k
; y
1;k
; y
2;k
;
y
2;kþ1
¼ y
2;k
þ hf
2
t
k
; y
1;k
; y
2;k
:
The first subscript on y identifies the dependent variable and the second subscript
denotes the time point. The same forward-marching scheme is performed. At each
time step, t
kþ1
, y
1;kþ1
,andy
2;kþ1
are calculated, and the iteration proceeds to the next
time step. To solve a higher-order ordinary differential equation, or a system of
ODEs that contains at least one higher-order differential equation, we need to
convert the problem to a mathematically equivalent system of coupled, first-order
ODEs.
Example 7.2
A spherical cell or particle of radius a and uniform density ρ
s
, is falling under gravity in a liquid of density ρ
f
and viscosity μ . The motion of the sphere, when wall effects are minimal, can be described by the equation
4
3
πa
3
ρ
s
dv
dt
þ 6μπav
4
3
πa
3
ðρ
s
ρ
f
Þg ¼ 0;
425
7.2 Euler’s methods
or, using v ¼ dz=dt,
4
3
πa
3
ρ
s
d
2
z
dt
2
þ 6μπa
dz
dt
4
3
πa
3
ðρ
s
ρ
f
Þg ¼ 0;
with initial boundary conditions
z 0ðÞ¼0; v ¼
dz
dt
¼ 0;
where z is the displacement distance of the sphere in the downward direction. Downward motion is along
the positive z direction. On the left-hand side of the equation, the first term describes the acceleration, the
second describes viscous drag, which is proportional to the sphere velocity, and the third is the force due
to gravity acting downwards from which the buoyancy force has been subtracted. Two initial conditions are
included to specify the problem completely. This initial value problem can be converted from a single
second-order ODE into a set of two coupled first-order ODEs.
Set y
1
¼ z and y
2
¼ dz=dt. Then,
d
2
y
1
dt
2
¼
d
dt
dy
1
dt
¼
dy
2
dt
¼
ðρ
s
ρ
f
Þ
ρ
s
g
9μ
2a
2
ρ
s
y
2
:
We now have two simultaneous first-order ODEs, each with a specified initial condition:
dy
1
dt
¼ y
2
; y
1
0ðÞ¼0; (7:27)
dy
2
dt
¼
ðρ
s
ρ
f
Þ
ρ
s
g
9μ
2a
2
ρ
s
y
2
; y
2
0ðÞ¼0: (7:28)
The constants are set to
a ¼ 10 μm; ρ
s
¼ 1:1g=cm
3
; ρ
f
¼ 1g=cm
3
; g ¼ 9:81 m=s
2
; μ ¼ 3:5cP:
We solve this system numerically using Euler’s explicit method. Program 7.1 was designed to solve only
one first-order ODE at a time. The function described in Program 7.1 can be generalized to solve a set of
coupled ODEs. This is done by vectorizing the numerical integration scheme to handle Equation (7.26). The
generalized function that operates on coupled first-order ODEs is named eulerforwardmethodvec-
torized. The variable y in the function file eulerforwardmethodvectorized.m is now a matrix with the row
number specifying the dependent variable and the columns tracking the progression of the variables’ values in
time. The function file, settlingsphere.m, evaluates the slope vector f.
MATLAB program 7.3
function [t, y] = eulerforwardmethodvectorized(odefunc, tf, y0, h)
% Euler’s forward method is used to solve coupled first-order ODEs
% Input variables
% odefunc : name of the function that calculates f(t, y)
%tf:final time or size of interval
% y0 : vector of initial conditions y(0)
% h : step size
% Other variables
n = length(y0); % number of dependent time-varying variables
% Output variables
t = [0:h:tf]; % vector of time points
426
Numerical integration of ODEs