King M.R., Mody N.A. Numerical and Statistical Methods for Bioengineering: Applications in MATLAB
Подождите немного. Документ загружается.


function values may not be available in the data set. Accordingly, two schemes of
numerical integration have been developed: open integration and closed integration.
The midpoint rule and Gaussian quadrature are examples of open integration
methods, in which evaluation of both endpoint function values of the interval is
not required to obtain the integral ap proximation. The trapezoidal rule and
Simpson’s rule use function values at both endpoints of the integration interval,
and are examples of closed integration formulas.
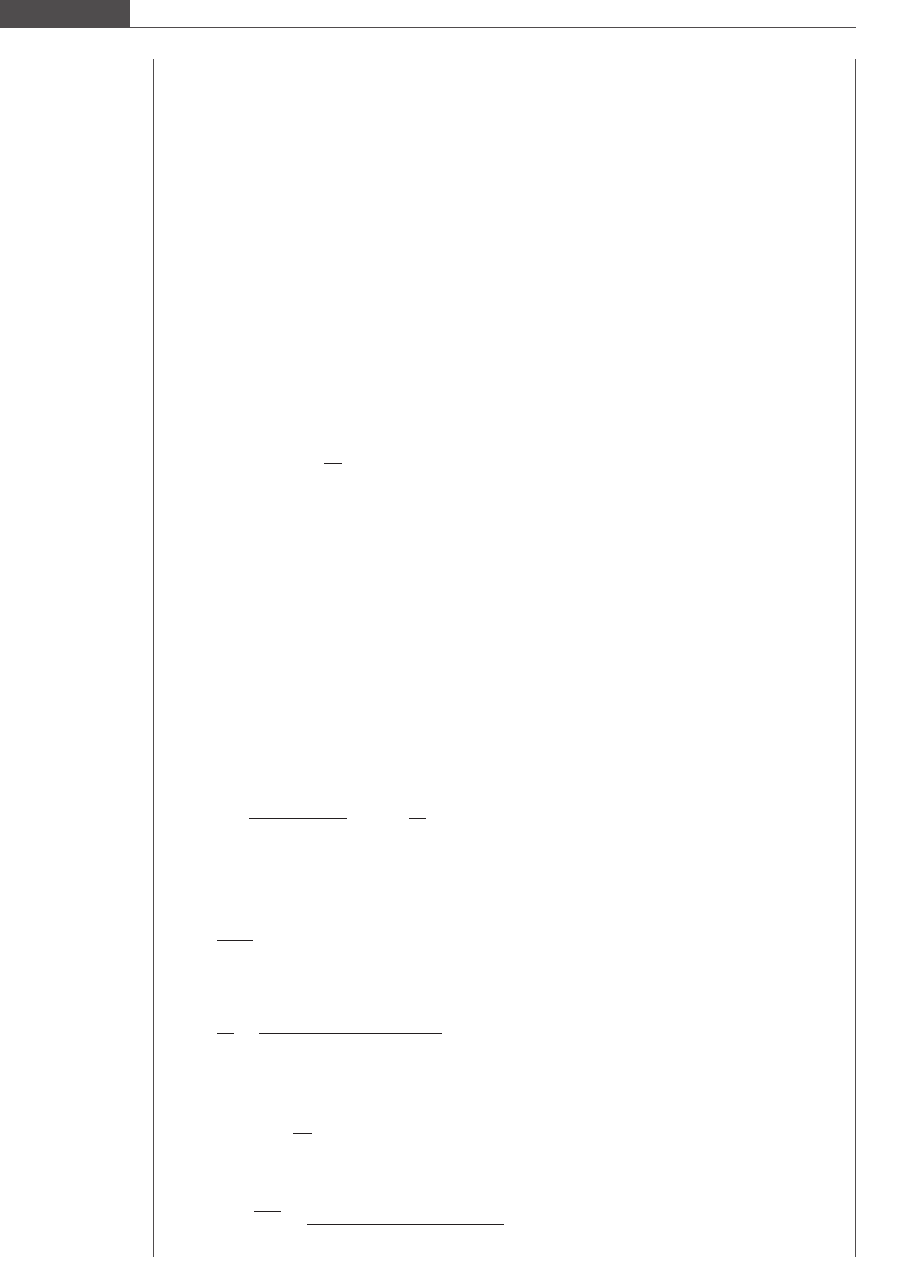
Box 6.1A Solute transport through a porous membrane
Solute transport through a porous membrane separating two isolated compartments occurs in a variety of
settings such as (1) diffusion of hydrophilic solutes (e.g. protein molecules, glucose, nucleic acids, and
certain drug compounds) found in the extracellular matrix into a cell through aqueous pores in the cell
membrane, (2) movement of solutes present in blood into the extravascular space through slit pores
between adjacent endothelial cells in the capillary wall, (3) membrane separation to separate particles of
different size or ultrafiltration operations to purify water, and (4) chromatographic separation processes.
Solute particles travel through the pores within the porous layer by diffusion down a concentration gradient
and/or by convective transport due to pressure-driven flow. The pore shape can be straight or convoluted.
Pores may interconnect with each other, or have dead-ends. When the solute particle size is of the same
order of magnitude as the pore radius, particles experience considerable resistance to entry into and
movement within the pore. Frictional resistance, steric effects, and electrostatic repulsive forces can slow
down or even preclude solute transport through the pores, depending on the properties and size of the
solute particles and the pores. Since a porous membrane acts as a selective barrier to diffusion or
permeation, the movement of solute through pores of comparable size is called hindered transport.
Mathematical modeling of the solute transport rate through a porous membrane is of great utility in
(1) developing physiological models of capillary (blood vessel) filtration, (2) studying drug transport in
the body, and (3) designing bioseparation and protein purification methods. The simplest model of
hydrodynamic (pressure-driven) and/or diffusive (concentration gradient-driven) flow of solute particles
through pores is that of a rigid sphere flowing in Stokes flow through a cylindrical pore. The hindered
transport model discussed in this Box was developed by Anderson and Quinn (1974), Brenner and
Gaydos (1977), and Smith and Deen (1983). A review is provided by Deen (1987).
Consider the steady state transport of a solid, rigid sphere of radius a flowing thro ugh a cylindrical pore of
radius R
0
and length L. The pore walls are impermeable and non-reactive. The sphere has a time-averaged
uniform velocity U in the direction of flow along length L (see Figure 6.3). The time-averaging smoothens
out the fluctuations in velocity due to the Brownian motion of the particle. Each cylindrical pore in the porous
membrane connects a liquid reservoir with solute concentration C
0
on one side of the membrane to another
liquid r eservoir of concentration C
L
that lies on the opposite side of the membrane (C
0
> C
L
). Let Cðr; zÞbe
the concentration (number of sphere centers per unit volume) of the solute in the pore. Particle motion
in the pore is due to convective fluid flow as well as diffusion down a concentration gradient.
The radius of the particle is made dimensionless with respect to the pore radius, α ¼ a=R
0
. The
dimensionless radial position of the particle in the pore is given by β ¼ r=R
0
.
Figure 6.3
Solute transport through a cylindrical pore.
U
v
R
0
r
a
L
C
L
C
0
z
357
6.1 Introduction
The flow within the pore is fully developed and the flow profile is parabolic, i.e. the fluid velocity is a
function of radial position only:
v βðÞ¼v
0
1 β
2
:
Fluid flow within the pores is at very low Reynolds number (Stokes flow or viscous flow). A freely
flowing suspended sphere in a bounded medium has a par ticle flow velocity equal to Gv, where G <1
and is called the “lag coefficient.” Note that G characterizes the reduction in particle velocity with
respect to fluid velocity due to resistance posed by the pore wall. Due to the concentration gradient
(chemical potential gradient), which is the driving force for diffusion, on average, the solute particles are
transported faster across the pore than the fluid itself. Since the sphere moves at an average velocity U
that is larger than Gv, it is not freely suspended in the fluid, and its expedient motion relative to the fluid
is retarded by wall friction. The drag force experienced by the sphere in Stokes flow is 6πμaKðU GvÞ,
where K is the “enhanced drag” (Anderson and Quinn, 1974).
At steady state, the drag forces that act to oppose motion of the sphere relative to the fluid can be
equated to the chemical driving forces that induce motion of the sphere relative to the fluid. On doing so,
we arrive at the equation for solute flux N (quantity transported/cross-sectional area/time).
NðrÞ¼DK
1
∂C
∂z
þ GvC:
At steady state, the flux is only a function of radial position and does not depend on axial position z.
The average flux
N is obtained by averaging NðrÞ over the pore cross-sectional area. Solute concen-
tration C in the pore is a function of radial and axial position:
C ¼ gzðÞexp EðβÞ=kT½; (6:3)
where E is the potential energy of interaction between the sphere and the pore wall, k is the Boltzmann
constant, and T is the temperature. An example of interaction between the sphere and the por e wall is
electrostatic repulsion/attraction, which is observed when the surfaces have a net charge. Another
example is steric interaction, which arises due to the finite size α of the solute particles. The annular region
adjacent to the pore wall, defined as 1 α
5
r 1, is devoid of the centers of moving spheres. In other
words, the concentration of sphere centers in this region is zero. There is no solute flux at r
4
1 α.
We simplify the analysis by considering only diffusional transport of the solute, i.e. fluid velocity
v = 0. The average flux is as follows:
N ¼
Ð
1α
0
N 2πβðÞdβ
Ð
1
0
2πβðÞdβ
¼2D
dg
dz
ð
1α
0
K
1
ðβÞexp E ðβÞ=kT½β d β: (6:4)
The concentration
CðzÞ averaged over the cross-sectional area is obtained by integrating
Equation (6.3):
1
π 1
2
ð
1α
0
C 2πβðÞdβ ¼
C ¼ g
ð
1α
0
exp EðβÞ=kT½2βðÞdβ:
Taking the derivative with respect to z, we obtain an expression for ∂g=∂z:
dg
dz
¼
d
C=dz
Ð
1α
0
exp EðβÞ=kT½2βðÞdβ
: (6:5)
Substituting this relationship into Equation (6.4), we get
N ¼DK
d
d
C
dz
;
where (Brenner and Gaydos, 1977)
K
d
¼ K
1
¼
Ð
1α
0
K
1
exp EðβÞ=kT½β dβ
Ð
1α
0
exp EðβÞ=kT½β dβ
: (6 :6)
358
Numerical quadrature
During steady state diffusion, the cross-sectional average concentration
C is a linear function of the
distance traveled along the pore,
C ¼
C
0
C
0
C
L
L
z;
and
d
C
dz
¼
C
0
C
L
L
:
The bulk solute concentration immediately outside the pore at z =0,L is not equal to the average
solute concentration
CðzÞ just inside the pore. This is because steric and electrostatic interactions
influence the distribution of solute within the pore such that the concentration within the pore may be
less or more than the external concentration. If only steric interactions are present, a lower concentration
of solute particles will be present in the pore at z = 0 than outside the pore. In this case, the
concentration profile in the pore at z = 0 is given by
CðβÞj
z¼0
¼
C
0
β 1 α
0 β
4
1 α:
The partition coefficient Φ is the ratio of the average internal pore concentration to the external
concentration of solute in the bulk solution at equilibrium:
Φ ¼
C
0
C
0
¼
Ð
1α
0
C
0
exp EðβÞ=kT½2πβ dβ
C
0
π 1
2
ðÞ
¼ 2
ð
1α
0
exp EðβÞ=kT½β dβ: (6:7)
The concentration gradient in the pore can be expressed in terms of the outside pore solute concen-
trations and the partition coefficient:
d
C
dz
¼Φ
C
0
C
L
L
:
Thus, the steady-state cross-sectional average solute flux is given by
N ¼ ΦDK
d
C
0
C
L
L
:
Smi th and Deen (1983) calculated the interaction energy EðβÞ between a sphere and
the pore wall, both with constant surface charge density, as a function of the sphere position in the
pore. The solvent was assumed to be a 1 : 1 univalent electrolyte (e.g. NaCl, KCl, NaOH, or KBr
solution).
When a charged surface (e.g. negatively charged) is placed in an electrolytic solution, the counter-
ions (positive ions) in the solution distribute such that they exist at a relatively higher concentration near
the charged surface due to electrostatic attraction. A “double layer” of charge develops on each charged
surface, and consists of the surface charge layer and the accumulated counter-charges adjacent to the
surface. The thickness of the double layer depends on the concentration of the ions in the solution and
the valency of each ion species in the solution. The counter-ions that assemble near the charged surface
tend to screen the electrostatic effects of the charged surface. As the ionic strength of the solution
decreases (concentration of salt is reduced) the counter-ion screening of the surface charges weakens
and the double layer width increases.
The Debye length (1=κÞ can be viewed as the thickness of the electric double layer. It is strictly a
property of the solvent. A large magnitude indicates that the charges on the surface are not well shielded
by counter-ions present in the solution. On the other hand, a narrow double layer results when a large
concentration of counter-ions adjacent to the surface charge shields the charges on the surface
effectively. As the Debye length increases, the double layers of two closely situated charged surfaces
interact more strongly with each other.
359
6.1 Introduction
The interaction energy EðβÞ in Equation (6.3) is equal to
1
(Smith and Deen, 1983)
E βðÞ¼R
0
""
0
RT
F
2
ΔG; (6:8)
where ΔG is the dimensionless change in free energy that occurs when the sphere and pore are brought
from infinite separation to their interacting position.
The physical constants are as follows:
F = Faraday constant = 96485.34 C/mol,
R = gas constant = 8.314 J/(mol K)
k = Boltzmann constant = 1.38 × 10
−23
J/(molecule/ K),
ε
0
= dielectric permittivity of free space = 8.8542 × 10
−12
C/(V m),
ε = relative permittivity, i.e. the ratio of solvent dielectric permittivity to permittivity in a vacuum.
For constant surface charge densities q
c
at the pore wall, and q
s
at the sphere surface, ΔG for the
system is given by (Smith and Deen, 1983)
ΔG ¼
8πτα
4
e
τα
1þταðÞ
2
Λσ
2
s
þ
4π
2
α
2
I
0
ðτβÞ
1þταðÞI
1
ðτÞ
σ
s
σ
c
þ
πI
0
ðτβÞ
τI
1
ðτÞ
2
e
τα
e
τα
ðÞταL ταðÞ
1 þ ταðÞ
σ
2
c
πτ e
τα
2 e
τα
e
τα
ðÞταL ταðÞΛ
1þταðÞ
; (6:9)
where
σ
s
¼
FR
0
q
s
""
0
RT
is the dimensionless sphere surface charge density,
σ
c
¼
FR
0
q
c
""
0
RT
is the dimensionless cylinder surface charge density,
I
ν
and K
ν
are the modified Bessel functions of order ν,
L ταðÞ¼coth τα ð1=ταÞ,
Λ ffi
π
2
I
0
τβðÞ
P
∞
t¼0
β
t
2tðÞ!
2
3t
t!ðÞ
2
I
t
τβðÞτK
tþ1
2τðÞþ0:75K
t
2τðÞ½
hi
;
τ ¼ R
0
κ ¼ R
0
F
2
""
0
RT
P
i
z
2
i
C
electrolyte;∞
hi
1=2
, is the ratio of the pore radius R
0
to the Debye length 1=κ,
C
electrolyte;∞
= bulk concentration of electrolyte,
z
i
= valency of ion species (i = 1 for both the positive and negative ions that constitute the 1 : 1
univalent electrolyte).
The parameters for this system are:
q
s
= 0.01 C/m
2
,
q
c
= 0.01 C/m
2
,
ε = 74 for a dilute 1 : 1 univalent aqueous solution,
T = 310 K,
C
electrolyte,∞
= 0.01 M,
R
0
= 20 nm,
α = 0.25.
You are asked to calculate the partition coefficient Φ for the solute. To perform this task, one must
use numerical integration (Smith and Deen, 1983). The solution is demonstrated in Section 6.3 using
the trapezoidal rule and Simpson’s 1/3 rule.
1
The model makes the following assumptions.
(1) The solute concentration is sufficiently dilute such that no solute–solute electrostatic and hydro-
dynamic interactions occur. Therefore, we can model the motion of one sphere independently from
the motion of other spheres.
360
Numerical quadrature
Section 6.3 discusses the Newton–Cotes rules of integration, which include popular
methods such as the trapezoidal rule, Simpson’s 1/3 rule, and Simpson’s 3/8 rule.
The composite Newton–Cotes rules approximate the functional form of the inte-
grand with a piecewise polynomial interpolant. The interval is divided into
n subintervals of equal width. The truncation errors associated with the quadrature
algorithms are also derived. A convenient algorithm to impr ove the accuracy of the
trapezoidal rule by several orders of magnitude is Romberg integration, and is
considered in Section 6.4. Gauss–Legendre quadrature is a high accuracy method
of quadrature for integrating functions. The nodes at which the integrand function is
evaluated are the zeros of special orthogonal polynomials called Legendre polyno-
mials. Section 6.5 covers the topic of Gaussian quadrature. Before we discuss some
of the established numerical methods of integration, we start by introducing some
important concepts in polynomial interpolation and specifically the Lagrange
method of interpolation. The latter is used to develop the Newton–Cotes rules for
numerical integration.
6.2 Polynomial interpolation
Many scientific and industrial experiments produce discrete data sets, i.e. tabula-
tions of some measured value of a material or system property that is a function of a
controllable variable (the indepen dent variable). Steam tables, which list the ther-
modynamic properties of steam as a function of temperature and pressure, are an
example of a discrete data set. To obtain steam properties at any temperature T and/
or pressure P intermediate to those listed in the published tables, i.e. at T 6¼ T
i
, one
must interpolate tabulated values that bracket the desired value. Before we can
perform interpolation, we must define a function that adequately describes the
behavior of the steam property data subset. In other words, to interpolate the data
points, we must first draw a smooth and continuous curve that joins the data points.
Often, a simple method like linear interpolation suffices when the adjacent data
points that bracket the desired data point are close to each other in value.
Interpolation is a technique to estimate the value of a function fðxÞ at some value x, when the only
information available is a discrete data set that tabulates fðx
i
Þ at several values of x
i
, such that
a x
i
b, a
5
x
5
b; and x 6¼ x
i
.
Interpolation can be contrasted with extrapolation. The latter describes the process
of predicting the value of a function when x lies outside the interval over which the
measurements have been taken. Extrapolated values are pr edictions made using an
interpolation function and should be regarded with caution.
To perform interpolation, a curve, called an interpolating function, is fitted to the
data such that the function passes through each data point. An interpolating function
(also called an interpolant) is used for curve fitting of data when the data points are
accurately known. If the data are accompanied by a good deal of uncertainty, there is
little merit in forcing the function to pass through each data point. When the data are
error-prone, and there are more data points than undetermined equation parameters
(2) The pore length is sufficiently long to justifiably neglect entrance and exit effects on the velocity
profile and to allow the particle to sample all possible radial positions within the pore.
(3) The electrical potentials are sufficiently small for the Debye–Hu
¨
ckel form of the Poisson–Boltzmann
equation to apply (Smith and Deen, 1983).
361
6.2 Polynomial interpolation

(the unknowns in the interpolant), linear least-squares regression techniques are
used to generate a function that models the trend in the data (see Chapter 2 for a
discussion on linear least -squares regression).
Sometimes, a complicated functional dependency of a physical or material prop-
erty on an independent variable x is already established. However, evaluation of the
function fxðÞmay be difficult because of the complexity of the functional form and/
or number of terms in the equation. In these cases, we search for a simple function
that exactly agrees with the true, complex function at certain points within the
defined inter val of x values. The techniques of interpolation can be used to obtain
a simple interpolating function, in place of a complicated function, that can be used
quickly and easily.
Interpolating functions can be constructed using polynomials, trigonometric
functions, or exponential functions. We concentrate our efforts on polynomial
interpolation functions. Polynomials are a class of functions that are commonly
used to approximate a function. There are a number of advantages to using
polynomial functions to create interpolants: (1) arithmetic manipulation of poly-
nomials (addition, subtraction, multiplication, and division) is straightforward
and easy to f ollow, a nd (2) polynomials are e asy to d iffe re ntiat e and i ntegra te,
and the result of either procedure is still a polynomial. For these reasons, poly-
nomial interpolants have been used to develop a number of popular numerical
integration schemes.
A generalized polynomial in x of degree n contains n þ 1 coefficients, and is as
follows:
pxðÞ¼c
n
x
n
þ c
n1
x
n1
þ c
n2
x
n2
þþc
1
x þ c
0
: (6:10)
To construct a polynomial of degree n, one must specify n + 1 points x; yðÞthat lie
on the path of pxðÞ. The n + 1 points are used to determine the values of the n +1
unknown coefficients. For example, to generate a line, one needs to specify only two
distinct points that lie on the line. To generate a quadratic function, three different
points on the curve must be spe cified.
Only one polynomial of degree n exists that passes through any unique set of n + 1 points. In other
words, an interpolating polynomial function of degree n that is fitted to n + 1 data points is unique.
The above statement can be proven as follows. Suppose two different polynomials
pðxÞ and qðxÞ, both of degree n, pass through the same n + 1 points. If
rxðÞ¼pxðÞqðxÞ, then rðxÞ must also be a polynomial of degree either n or less.
Now, the difference pxðÞqðxÞ is exactly equal to zero at n + 1 points. This means
that rxðÞ¼0hasn + 1 roots. A polynomial of degree n has exactly n roots (some or
all of which can be complex). Then, rðxÞ must be a polynomial of degree n + 1. This
contradicts our supposition that both pðxÞ and qðxÞ are of degree n. Thus , two
different polynomi als of degree n cannot pass through the same n + 1 points. Only
one polynomial of degree n exists that passes through all n + 1 points.
There are two ways to create an interpolating polynomial function.
(1) Polynomial interpolation Fit a polynomial of degree n to all n + 1 data points.
(2) Piecewise polynomial interpolation Fit polynomials of a lower degree to subsets
of the data.
2
For example, to fit a polynomial to ten data points, a cubic polynomial
2
The MATLAB plot function connects adjacent data points using piecewise linear interpolation.
362
Numerical quadrature
can be fitted to three sets of four consecutive points. Three cubic polynomials are
constructed for the three data subsets: x
1
; x
2
; x
3
; x
4
ðÞ; x
4
; x
5
; x
6
; x
7
ðÞ,and
x
7
; x
8
; x
9
; x
10
ðÞ. Thus, the interpolating domain x
1
x x
10
is divided into three
subintervals, and interpolating polynomials of degree 3 are constructed for each of
these subintervals.
When the number of data points in the data set is greater than five, piecewise
polynomial interpolation is preferred over creating a single interpolating polynomial
function that passes through each point. Fitting a polynomial of increasingly higher
degrees to n > 5 data points is strongly discouraged. An interpolating polynomial
will pass through all the points or nodes used to constr uct the polynomial function.
However, in between the nodes, a high-degree polynomial function may exhibit
pronounced oscillatory behavior. In other words, high-de gree polynomial interpo-
lants may produce intermediate values that are far removed from the true path that
connects the data points. This capricious behavior of higher-degree polynomials is
called polynomial wiggle.
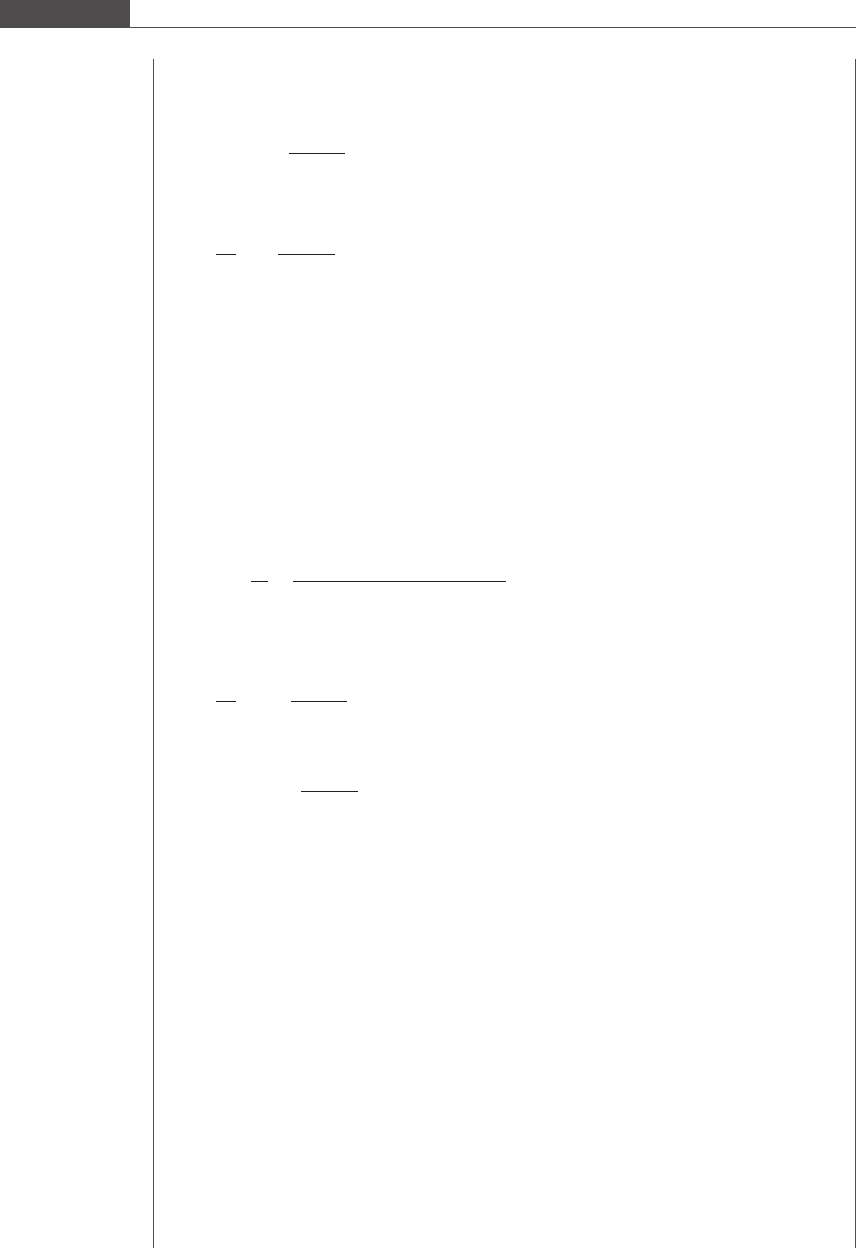
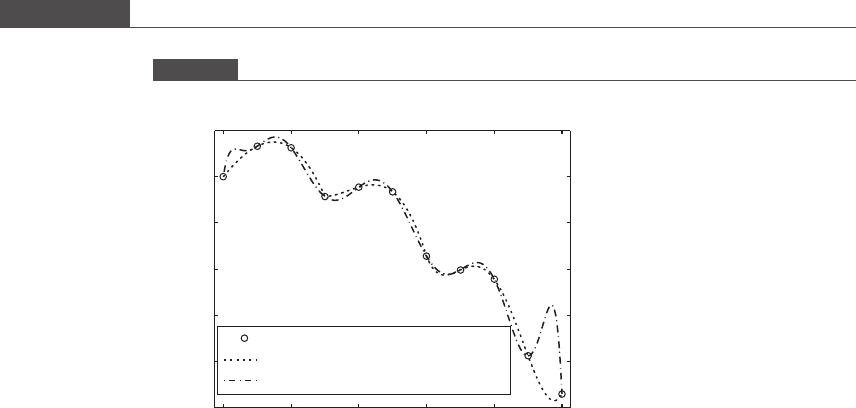
Figure 6.4 shows 11 data points. A tenth-degree polynomial function is con-
structed using all 11 points. A piecewise polynomial function is also constructed in
which the first four points (1–4) are fitted with a cubic polynomial, the next set of
four points (4–7) is fitted with a cubic polynomial, while the last set of five points
(7–11) is fitted with a fourth-degree polynomial. Note that the cubic functions
smoothly connect each point without straying away from the direction (slope) of
the line connecting two adjacent data points. The high degree polynomial function
shows pronounced oscillations between data points. Between the last two data
points, the function shows a large peak that is absent in the data.
If you examine Figure 6.4, you will notice that by choosing non-overlapping
subsets of data points and interpolating with low-order polynomials, slope continu-
ity of the functions may not be guaranteed at the endpoints of each subset. In this
example, discontinuity of the interpolating polynomi al function occurs at the fourth
and seventh data points. A special polynomial interpolating function called a cubic
spline can be used to ensure slope continuity at nodes whi ch join two different
polynomial interpolants. To learn how to construct cubic splines for data interpo-
lation, the reader is referred to Recktenwald (2000). The spline function provided
Figure 6.4
Piecewise polynomial interpolation versus high-degree polynomial interpolation.
0 2 4 6 8 10
−50
−40
−30
−20
−10
1
2
3
4
5
6
7
8
9
10
11
0
10
x
f(x)
Nodes
Piecewise polynomial interpolant
10th-degree polynomial interpolant
363
6.2 Polynomial interpolation

by the MATLAB software calculates the piecewise polynomial cubic spline inter-
polant of the user-supplied data.
An interpolating function approximates the function values that lie between the
known data points. The error in approximation depends on (1) the true functional
dependency of the property of interest on the independent variable, (2) the degree of
the interpolating polynomial, and (3) the position of the n + 1 nodes where the
function values are known and used to construct the polynomial interpolant. The
error does not necessarily decrease with increase in the degree of the polynomial used
for interpolation due to the drawbacks of polynomial wiggle.
A straightforward method to determine the coefficients of the nth-degree polyno-
mial is to substitute each data pair x; yðÞinto Equation (6.10). This produces n +1
linear equations. Suppose n = 4, and we have function values at five points:
x
1
; x
2
; x
3
; x
4
,andx
5
. The set of linear equations can be written in matrix notation:
Ac ¼ y ;
where
A ¼
x
4
1
x
3
1
x
2
1
x
1
1
x
4
2
x
3
2
x
2
2
x
2
1
x
4
3
x
3
3
x
2
3
x
3
1
x
4
4
x
3
4
x
2
4
x
4
1
x
4
5
x
3
5
x
2
5
x
5
1
2
6
6
6
6
4
3
7
7
7
7
5
; c ¼
c
1
c
2
c
3
c
4
c
5
2
6
6
6
6
4
3
7
7
7
7
5
; y ¼
y
1
y
2
y
3
y
4
y
5
2
6
6
6
6
4
3
7
7
7
7
5
;
A is called the Vandermonde matrix. This linear problem is not overdetermined, and
we do not need to invoke least-square regression procedures. Solution of the system
of linear equations using methods discussed in Chapter 2 yields the coefficients that
define the interpolating polynomial. The n + 1 values at which y is specified must be
unique, otherwise A will be rank deficient and an interpolating polynomial of degree
n cannot be determined.
Using MATLAB
A set of simultaneous linear equations can be solved using the MATLAB backslash
operator (c = A\y). The use of this operator was discussed in Chapter 2. This is one
method to find the coefficient matrix c. Another method to determine the constants of
the interpolating polynomial function is to use polyfit. The MATLAB polyfit
function can be used to calculate the coefficients of a polynomial even when the problem
is not overspecified. Usage of the polyfit function for overdetermined systems was
discussed in Chapter 2. The syntax to solve a fully determinate problem (a set of linear
equations that is consistent and has a unique solution) is the same and is given by
[c, S] = polyfit(x, y, n)
where n is the degree of the interpolating polynomial function and is equal to one less
than the number of data points. The output vector c contains the coefficients of the
polynomial of nth degree that passes exactly through the n + 1 points.
A difficulty with this method is that the Vandermonde matrix quic kly becomes ill-
conditioned when either the interp olating polynomial degree ≥ 5 or the magnitude of
x is large. As you may remember from Chapter 2, in an ill-conditioned system, the
round-off errors are greatly magnified, producing an inaccurate solution. The con-
dition number of the Vandermonde matrix indicates the conditioning of the linear
364
Numerical quadrature
system. W hen the condition number is high, the solution of the linear system is very
sensitive to round-off errors.
Other methods, such as the Lagrange interpolation formula and Newton’s method of
divided differences, have been developed to calculate the coefficients of the interpola-
ting polynomial. Because of the uniqueness property of an nth-degree polynomial
generated by a set of n + 1 data points, these methods produce the same interpolating
function. However, each method rearranges the polynomial differently, and accord-
ingly the coefficients obtained by each method are different. For the remainder of this
section, we focus on the Lagrange method of interpolation. An important advantage
of this method is that the polynomial coefficients can be obtained without having to
solve a system of linear equations. Lagrange interpolation formulas are popularly
used to derive the Newton–Cotes formulas for numerical integration. For a discussion
on Newton’s method of interpolation, the reader is referred to Recktenwald (2000).
Suppose we wish to linearly interpolate between two data points x
0
; y
0
ðÞand
x
1
; y
1
ðÞ. One way to express the linear interpolating function is
pxðÞ¼c
1
x þ c
0
:
We can also write the linear interpolating function as
pðxÞ¼c
1
x x
1
ðÞþc
0
x x
0
ðÞ: (6:11)
When substituting x ¼ x
0
in Equation (6.11), we obtain
c
1
¼
y
0
x
0
x
1
:
When x ¼ x
1
, we obtain
c
0
¼
y
1
x
1
x
0
:
Equation (6.11) becomes
pðxÞ¼
x x
1
ðÞ
x
0
x
1
y
0
þ
x x
0
ðÞ
x
1
x
0
y
1
: (6:12)
Equation (6.12) is the first-order Lagrange interpolation formula. We define the first-
order Lagrange polynomials as
L
0
ðxÞ¼
x x
1
ðÞ
x
0
x
1
; L
1
ðxÞ¼
x x
0
ðÞ
x
1
x
0
:
The interpolating polynomial is simply a linear co mbination of the Lagrange poly-
nomials, i.e.
pxðÞ¼L
0
y
0
þ L
1
y
1
;
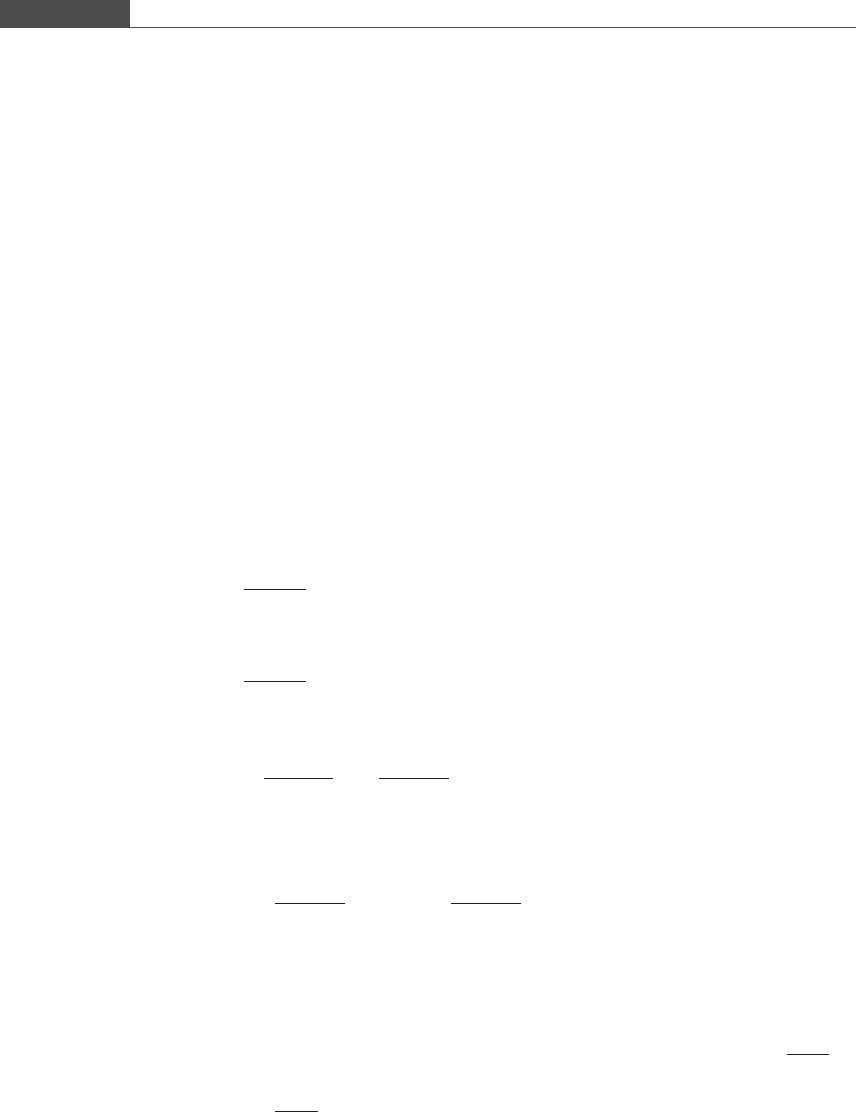
so pðxÞ is equal to the sum of two straight line equations. The first term,
xx
1
ðÞ
x
0
x
1
y
0
,
represents a straight line that passes through two points x
0
; y
0
ðÞand x
1
; 0ðÞ. The
second term,
xx
0
ðÞ
x
1
x
0
y
1
, represents a straight line that passes through the points
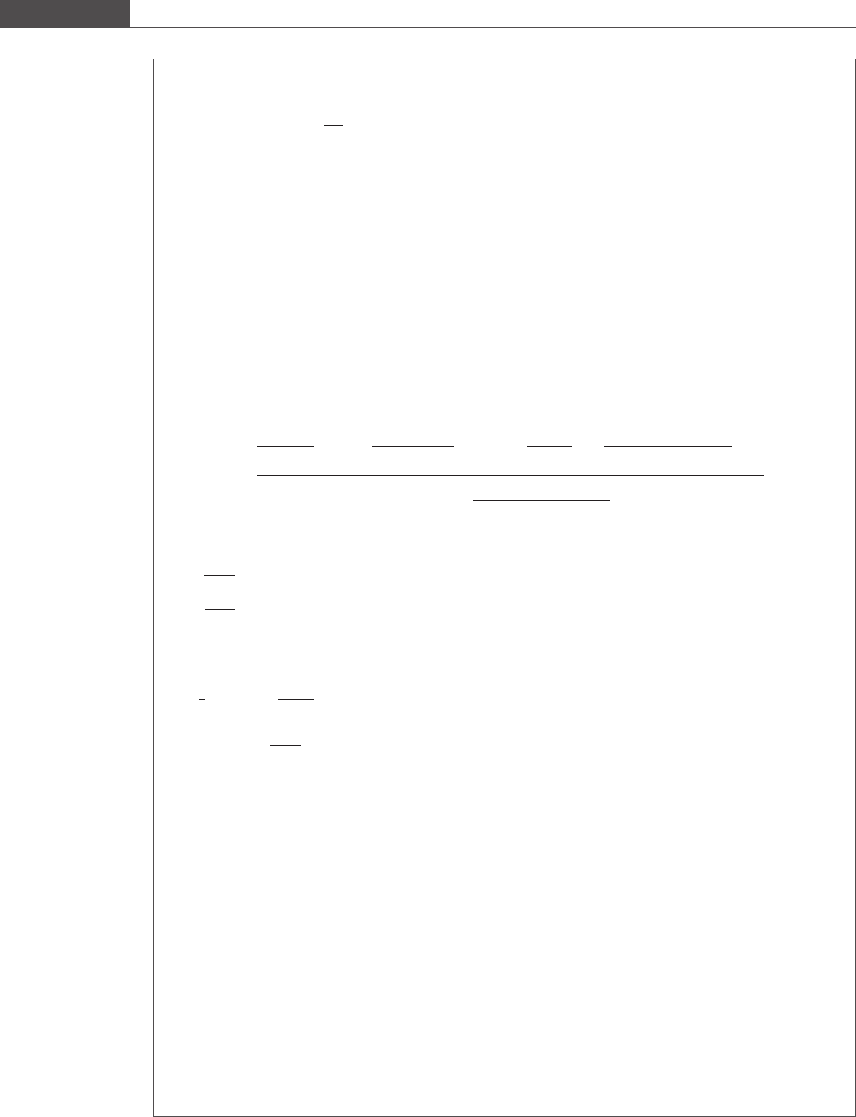
x
1
; y
1
ðÞand x
0
; 0ðÞ. The three straight line equations are plotted in Figure 6.5.
Suppose we wish to interpolate between three points x
0
; y
0
ðÞ, x
1
; y
1
ðÞ, and x
2
; y
2
ðÞ
by constructing a quadratic function. The interpolating function is given by
pxðÞ¼c
2
x x
1
ðÞx x
2
ðÞþc
1
x x
0
ðÞx x
2
ðÞþc
0
x x
0
ðÞx x
1
ðÞ: (6:13)
365
6.2 Polynomial interpolation
The coefficients can be derived in a similar fashion as done for the linear problem.
The second-order Lagrange interpolation formula is given by
pxðÞ¼
x x
1
ðÞx x
2
ðÞ
x
0
x
1
ðÞx
0
x
2
ðÞ
y
0
þ
x x
0
ðÞx x
2
ðÞ
x
1
x
0
ðÞx
1
x
2
ðÞ
y
1
þ
x x
0
ðÞx x
1
ðÞ
x
2
x
0
ðÞx
2
x
1
ðÞ
y
2
;
(6:14)
and can be written compactly as
pxðÞ¼
X
2
k¼0
y
k
∏
2
j¼0; j6¼k
x x
j
x
k
x
j
"#
;
where ∏ stands for “the product of.” There are three second-order Lagrange poly-
nomials and each is a quadratic function as follows:
L
0
ðxÞ¼
x x
1
ðÞx x
2
ðÞ
x
0
x
1
ðÞx
0
x
2
ðÞ
; L
1
ðxÞ¼
x x
0
ðÞx x
2
ðÞ
x
1
x
0
ðÞx
1
x
2
ðÞ
;
L
2
ðxÞ¼
x x
0
ðÞx x
1
ðÞ
x
2
x
0
ðÞx
2
x
1
ðÞ
:
Note that L
0
ðx
i
Þ is equal to zero when i ¼ 1; 2 and is equal to one when i ¼ 0; L
1
ðx
i
Þ
is equal to one for i ¼ 1, and is zero when i ¼ 0; i ¼ 2. Similarly, L
2
ðx
i
Þ ex actly
equals one when i ¼ 2 and is zero for the other two values of i. Because of this
property of the Lagrange polynomials, we recover the exact value y
i
of the function
when the corresponding x
i
value is plugged into the interpolation formula. Each
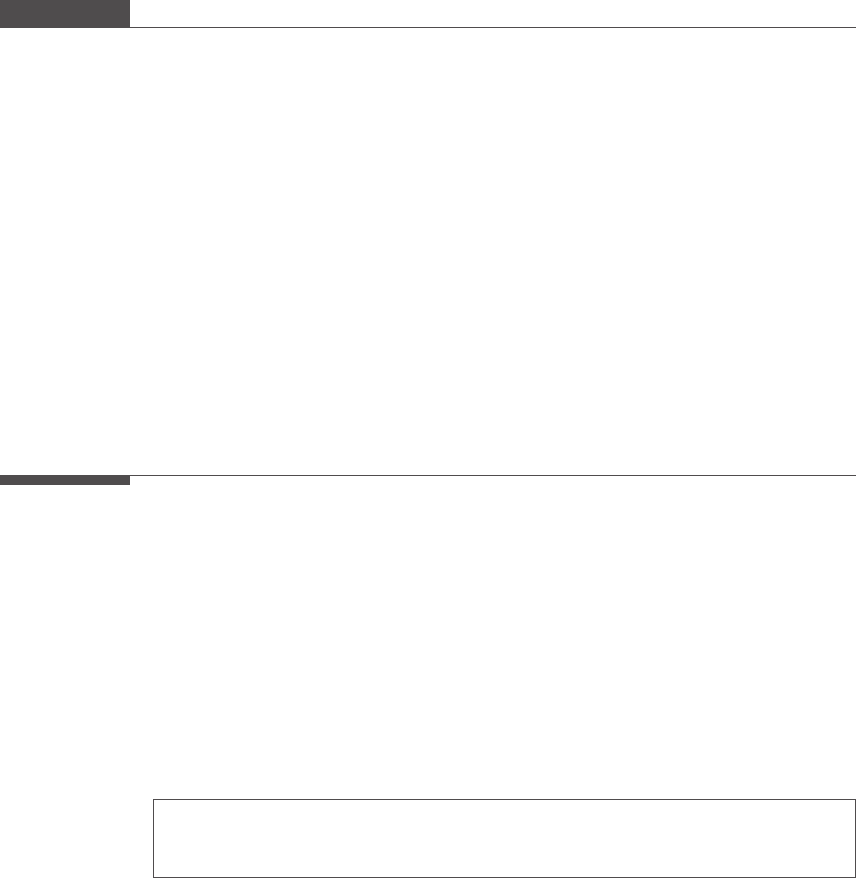
term L
i
y
i
represents a quadratic polynomial. The interpolating polynomial pðxÞ is
obtained by summing the three quadratic Lagrange polynomials. Figure 6.6 dem-
onstrates how the sum of three quadratic functions produces a second-degree
interpolating polynomial.
An advantage of the Lagrange method is that round-off errors are less likely to
creep into the calculation of the Lagrange polynomials.
Figure 6.5
The interpolating polynomial pðxÞ passes through two points (1, 1) and (2, 2). The sum of the two dashed lines
produces the interpolating polynomial.
0.5 1 1.5 2 2.5
0
0.5
1
1.5
2
2.5
x
y
L
0
y
0
L
1
y
1
p(x)
366
Numerical quadrature