К компетенциям - через инноватику
Подождите немного. Документ загружается.

21
– формирование информационных и аварийных сообщений;
– дистанционное управление работой асинхронных двигателей;
– анализ полученных с датчиков текущих параметров и формиро-
вание результирующего воздействия методом ПИ-регулирования;
– накопление собранной информации в базе данных.
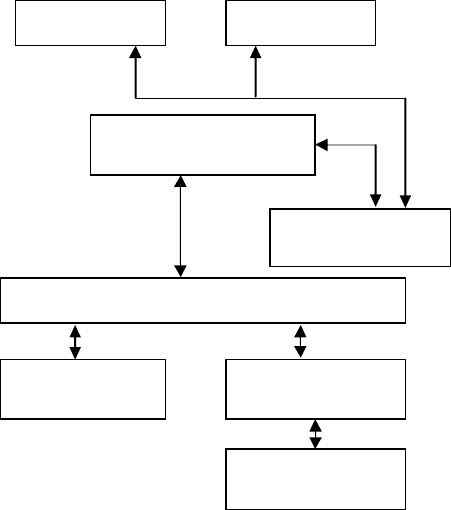
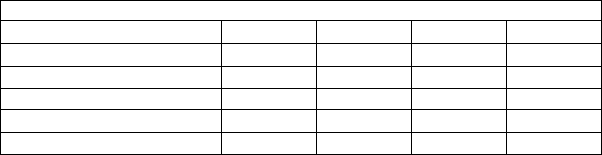
На рис. 1 приведена архитектура программного обеспечения в со-
ответствии с функциональным назначением SCADA-системы и схе-
мой управления асинхронными двигателями.
Рис. 1. Архитектура программного обеспечения
Для крупных промышленных объектов с повышенной техноген-
ной опасностью, к которым относятся магистральные газо- и нефте-
проводы, а также станции водоснабжения, важнейшим требованием
к системам автоматизации является требование повышенной надеж-
ности, так как здесь недопустимы даже мелкие аварии из-за возмож-
WEB-клиент
SCADA-система
WEB-клиент
Сервер ввода-вывода
База данных
WEB-сервер
Датчики
Преобразователь
частоты
Асинхронный
двигатель

22
ного значительного экологического и материального ущерба. Поэто-
му решения, направленные на выполнение этого требования, имеют
наивысший приоритет при выборе программно-аппаратных средств,
используемых на всех уровнях автоматизации. Как рассмотрено вы-
ше, современные SCADA-системы удовлетворяют всем необходи-
мым требованиям и являются наиболее перспективным путем разви-
тия управления технологическим процессом.
Список литературы
1. Ефентьев А. Системы управления подогревателями газа, нефти, во-
ды //Соврем. технологии автоматизации. – 2007. – № 2. – С. 54–56.
2. Денисенко В. ПИД-регуляторы: вопросы реализации // Соврем. техно-
логии автоматизации. – 2007. – № 4. – С. 86–97.
J. Hricko, postgraduate student
Alexander Dubček University in Trenčín, Faculty of Mechatronics
The short introduction to use and work in Real-time Windows Target
©
This paper deals about introduce to problematic of work in environ-
ment of Real-Time Windows Target as part one of MATLAB. In intro-
duction of this article is shown installation and configuration sequence
witch is necessary make for successfully work in real-time environment.
The next part of this article deals about practically experience of using
this tool in teaching process on Faculty of mechatronics in Alexander
Dubček University in Trenčín. In this it time and in this same part of
article are indicate advantage and disadvantage of hardware in the loop
simulation (HIL simulation). In present is it proves as very strong tool
for control algorithm design.
The put on of simulation tools near design of mechatronics systems its
find indivisible place. Their using produces reduction of the expense for
mechatronics systems full design, but simultaneously we can get the many
methodic mechatronics systems design. One mainly methodic for mecha-
tronics systems design is the Model Base Design. Very interesting solution
mechatronics systems design is appearing to using the Real-Time tool-
boxes, which are to disposal in environment of very strong tool the MAT-
LAB. We can divide using of these toolboxes to two groups. First group is
control algorithm verifying with way that to computer with MATLAB and
© J. Hricko, 2009
23
with installed Real-Time kernel we connecting real device. The connection
is actualizing with multifunction input / output (I/O) card. Same card have
many inputs for encoders and inputs / outputs for counters and timers. The
second very strong group in control algorithm design is verifying of func-
tioning in praxis. In this method is building control algorithm in control
processor and next we connect the control processor to MATLAB. In
MATLAB is created the model of controlled system and we check actuat-
ing hit to model.
As we shown in introduction of this work, for correctly activity of real
time in MATLAB environment is necessary has correctly installed Real-
Time kernel and good configured compiler. Compiler is using for building
of created block scheme. The all-necessary settings we can summarize to
some steps.
Step 1: Compiler adjusts – as we up shown, compiler exploitation is
very important in real-time applications. The compiler create from
classical blocs scheme, generated in Simulink source code, that is use-
able for work in real-time. MATLAB supported many types of compil-
ers. For most popular compiler belong for instance: Borland, Microsoft
and Watcom. Of curse, these compilers are external, and are necessary
installed next software product. At last version of MATLAB, ver. 7.0,
the company MathWorks decided integrated self-equal compiler to
MATLAB environment. The old versions contains compiler, but his
functionality was delimited. The command for compiler setting in
MATLAB is:
mex –setup
After entered of this command in Command Window is shown dialog,
witch inform user about the if it will install compiler to MATLAB envi-
ronment, and in this same time follow possibility to find installed compil-
ers on computer witch is used. After answer of all questions we can get
information about correctly compiler setting.
Step 2: Real-time kernel installation – for installing real-time kernel
for real-time environment is necessary entered command:
rtwintgt –install
Installed kernel is running on CPU in privileged or in kernel mode. The
kernel us as primary time source integrated clock in PC. For case of good
kernel installation is the verifying possible with using of next command:
rtwho
Step 3: Block scheme generating – After successful compiler adjusting
and kernel installing we can get to generate of own block scheme. For
simplify of definition we will think with next block scheme:
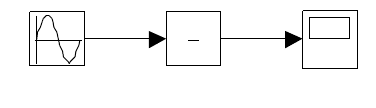
24
Sine Wave
Scope
Integrator
1
s
Fig. 1. Model of block scheme for introduction to work in RTWT
The very important component in shown scheme is setting of indi-
vidual blocks. In same of blocs in Simulink environment we can find
item Sample Time. This item is for work in real-time very important be-
cause this item to us define sampling period. In all place of project we
must this value set to this same value. As very profitable solution is ap-
pear set this item on random variable, which next step define in work-
space on MATLAB. With this we reach, that all value of Sample time
will be set equal.
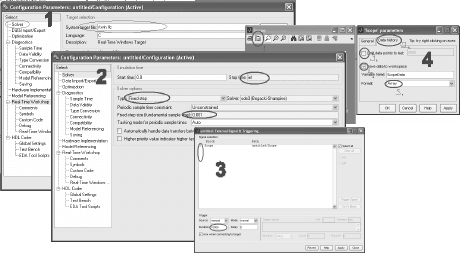
Step 4: RTWT and solver setting – This setting we conduct in form
of using menu in model environment. In first line is necessary defining
in what environment will be work our application. Because aim of this
paper is introduce to problematic of Real-Time Windows Target using,
the setting will be appointed for this environment. In created model is
necessary going to Tool → Real Time Workshop → Options. In opened
window we need set in box System target value rtwin.tlc. The next set-
tings are in this time for us non-interesting. The next step is solver set-
ting. In this same window we can switch to Solver component. In this
card we need change type of solver to Fixed Step. In this same time we
defining in box Fixed step size our variable, witch our present size of
Sample Time.
Step 5: The display results settings: Very often problem in real-time
environment work is, that in block Scope, are not displayed any results.
This fact is cause by absent of next settings. In Tool → External Control
Mode Panel is necessary push on Signal & Triggering. The box Dura-
tion, give us information about value how much samples will be MAT-
LAB remember. Therefore we can change this value, and when we have
us in our scheme block or blocks Scope we must select only these wave-
forms that we have about its interesting. This selection is under marking
X. For results saving, sown on block Scope, we can use possibility Save
data to Workspace. The proceeding is indicated on figure 2.
For concrete realization of communications with real applications we
can in MATLAB environment use multifunctional input – output card. On
FM TnUAD in Trencin ground we have to disposal up to two these cards.
25
With their properties are both cards equal, because ware from this same
produces and it from Humusoft. The base properties of cards are:
• 32 bits architecture
• 14 bits A/D and D/A converter, witch is used for 8 analog inputs and
8 analog outputs. For card MF624 with range ± 10V
• 8 / 8 digital inputs / outputs
• 4 inputs for incremental sensors
• 4 / 4 counters / timers
• and another
Fig. 2. Graphical progress of settings in Real-Time Windows Target
environment
The concrete in formations we can get for internet site of producer [3].
Using of this card in MATLAB environment is supported by big groups of
drivers for different types of producers.
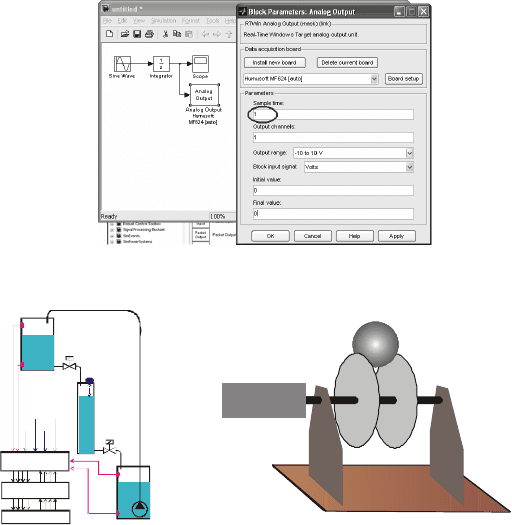
In case, that we will use concrete input / output in RTWT environment,
we can exploit it with next way. When we drawing blocs’ scheme in Simu-
link we can use blocs, witch provides labeling toolboxes. Assume that we
use analog output. His properties window is shown on figure 3.
Basically figure 3 we can say, that in first step we set or install cart,
whose analog output we will us. We select from offer list of drivers. If we
have old cart with ISA bus, must we set the base address. In next step
again we set Sample Time. Next boxes present number of ports (channel)
and output range. When we work with analog output is very important set
the initial and the final value. These values are these, which will by have
output after simulation end. At analog outputs is suitable using value zero.
Can by happen that actual value after end of simulations will by not zero
what us can be because non supply behave of ours device.
26
At end of this article we will be shown devices that were created during
winter half the 2008/09. All devices were created during seminars from sub-
ject Mechatronics system projecting. Factually we deal about two devices.
First device (see fig. 4a) is using of logical control in MATLAB environ-
ment. This control we have use for control of fluid level in container. We
have control two electro valve and one pump. As feedback we have using
laser sensor with analog output value. This solution is not very happy, be-
cause this type of sensors is better for measurement of distance of rigid bod-
ies and not for distance of flow. Bat for education process is this system very
illustrative. The second device, which we have created, was stabilization of
structural non stable system (see fig. 4b). This system is composite from one
direct-current motor, two discs and from ball. The aim of this device is hold
ball in maximal non-stable position. Too this case we have use optical sen-
sor for measuring of distance.
Fig. 3. Analog output properties window
EV1
EV2
AS1
S1
S2
S3
S4
PC + MF624
Elektronika
MATLAB
C1
EV1
EV2
AS1 C1
M1
a b
Fig. 4. Schematic indication of created devices controlled with MATLAB
and Real-Time Windows Target

27
At conclusion if this article we can indicate, that put on Real-Time Win-
dows Target in seminars from subjects deals with modeling simulation and
control theory was increase interest of students about relative non-interest
theoretical subject. In the paper was shown the method of creating very sim-
plify application work in Real-Time on base of software tool MATLAB. At
end of this article we were deals about real devices in pedagogic process.
Reference
1. Masár, I., Ivanov, I. Aplikácie reálneho času v programovom prostriedku
MATLAB/SIMULINK. – Bratislava : STU, 2001. – ISBN 80-227-1601-4.
2. Boršc, M., Hurta, F., Vitko, A. Systémy automatického riadenia. – Trenčín :
TnU, 2001.
3. http://www.humusoft.com/produkty/datacq.
А. С. Гуринов, О. Л. Цветкова
Ростовская-на-Дону государственная академия
сельскохозяйственного машиностроения
Кинематическая модель штукатурного робота
©
Кинематическая модель робота позволяет описать движение ро-
бототехнической системы в трехмерном пространстве в зависимости
от времени без учета сил и моментов, вызывающих это движение.
Для математического описания структурных схем роботов сущест-
вуют различные способы построения локальных систем координат,
отличающиеся наглядностью представления, а также вычислитель-
ной сложностью полученных уравнений решения прямых и обратных
задач кинематики о положении, скоростях и ускорениях [1, 2]. Одним
из наиболее распространенных методов построения локальных сис-
тем координат является преобразование Денавита – Хартенберга,
суть которого изложена в [3].
Параметры структурной схемы робота сведены в табл. 1, где
ϕ
–
угол поворота относительно оси Z до совмещения осей X; d – смеще-
ние системы координат по оси
Z
до совмещения начала систем ко-
ординат; a – смещение системы координат по оси X до совмещения
начала систем координат;
α
– угол поворота относительно оси X до
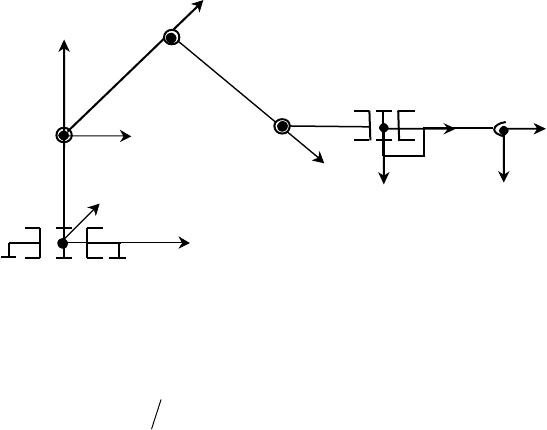
совмещения осей Z. На рис. 1 показаны правила построения локаль-
ных систем координат.
© Гуринов А. С., Цветкова О. Л., 2009
28
Таблица 1. Параметры манипуляционной структуры штукатурного робота
Преобразование Денавита – Хартенберга
Кинематическая пара
ϕ
d a
α
0,1 q
1
l
1
0
90°
1,2 q
2
0 l
2
0
2,3 q
3
0
l
3
0
3,4 q
4
0 l
4
90°
4,5 q
5
0 l
5
0
Для контроля и управления движениями робота необходимо иметь
уравнения решения прямой и обратной задач кинематики о положении.
Для этого обычно используют матричный метод, изложенный в [1].
Уравнения, описывающие решение прямой задачи кинематики
о положении, будут иметь вид:
5 1 2 3 4 5 5 1 5
4 1 2 3 4 3 1 2 3 2 1 2
5 1 2 3 4 5 5 1 5
4 1 2 3 4 3 1 2 3 2 1 2
1 5
cos cos( )cos sin sin
cos cos( ) cos cos( ) cos cos ;
sin cos( )cos cos sin
sin cos( ) sin cos( ) sin cos ;
sin(
l q q q q q l q q
l q q q q l q q q l q q
l q q q q q l q q
l q q q q l q q q l q q
l l q
x
y
z
+ + + +
+ + + + +
+ + − +
+ + + + +
=
+
=
+
= +
2 3 4 5 4 2 3 4
3 2 3 2 2
1 2 3 4 5 1 5
1 2 3 4
1 2 3 4
)cos sin( )
sin( ) sin ;
cos cos cos( )sin sin cos ;
cos cos sin( );
cosш sin sin( ),
q q q l q q q
l q q l q
q q q q q q q
q q q q
q q q q
+ + + + +
+ + +
ϕ= − + + +
θ= + +
= + +
+ (1)
где
z
y
x
,
,
– положение рабочего инструмента в базовой системе коор-
динат робота;
ψ
θ
ϕ
,,
– углы ориентации рабочего инструмента в базо-
вой системе координат робота;
51
...qq
– обобщенные координаты ро-
бота.
Вывод выражений, определяющих решение обратной задачи ки-
нематики о положении, при наличии большого количества враща-
тельных степеней подвижности (> 4), является трудоемким процес-
сом, а последующие расчеты значений обобщенных координат по
этим выражениям требуют значительных вычислительных затрат.
На основе анализа технологии выполнения штукатурных работ
определено, что типовыми траекториями движения рабочего инстру-
мента штукатурного робота являются горизонтальные или верти-
кальные траектории вдоль оштукатуриваемой поверхности. Поэтому
в данном случае возможно более простое решение обратной задачи
29
кинематики, основанное на информации о параметрах обрабатывае-
мой поверхности и требованиях технологии проведения штукатурных
работ [4]. Исходными данными являются высота h, ширина
s
зоны
обслуживания, удаленность
*
L
от поверхности.
Рис. 1. Структурная схема штукатурного робота с локальными системами
координат степеней подвижности
Значение первой обобщенной координаты определяется из выра-
жения:
(
)
(
)
( ) *
1 5
arctg
i
g
q s L l
= −
, где i – номер опорной точки траек-
тории;
g
– номер точки на горизонтальной линии. Для обеспечения
положения руки робота параллельно оси
X
базовой системы коор-
динат значение обобщенной координаты
( ) ( )
5 1
i i
q q
= . Значения обоб-
щенных координат
( ) ( )
2 3
,
i i
q q
определяются численно из следующей
системы уравнений:
* ( ) ( ) ( ) ( )
1 2 2 3 2 3 4 5
( ) ( ) ( )
1 2 2 3 2 3
cos ( cos cos( ) ) ;
sin sin( ),
i i i i
i i i
j
L q l q l q q l l
h l l q l q q
= + + + +
= + + +
где
j
– номер горизонтальной линии.
Для обеспечения перпендикулярности рабочего инструмента от-
носительно поверхности значение обобщенной координаты
)(
)(
3
)(
2
)(
4
iii
qqq +−=
.
q
3
q
4
q
5
l
2
l
3
l
4
l
5
l
1
q
2
q
1
X
0
Z
0
X
1
Z
1
X
2
Z
2
X
3
Z
3
X
4
Z
4
Z
5
Y
0

30
В случае, когда известны координаты рабочего инструмента в ба-
зовой системе координат робота, решение обратной задачи кинема-
тики о положении сводится к виду
( )
(
)
( )
( )
( )
( )
( )
1 5
( ) ( )
5 1
( ) 4 4 ( ) 4 4 ( )
2 1 1 1
( ) 2 5 ( ) 2
3 2 4 1 5
( ) ( ) ( )
4 2 3
arctg
;
arctg cos ( ) cos ( ) ;
arctg 1 2 4 cos ( ) ;
i
i i
i i
i i i
i
i i
i
i i i
q y x l ;
q q
q l q z q ...
q l l q z l ...
q q q .
= −
=
= ⋅ + ⋅ +
= − − ⋅ ⋅ ⋅ ⋅ +
= − +
С целью определения точности решения с использованием аналити-
ческих выражений были исследованы законы изменения обобщенных
координат при отработке типовой горизонтальной траектории, получен-
ные на основе аналитических и выражений матричного метода (1). Ис-
следование показало, что расхождение результатов не превышает 7,8 %.
Таким образом, решение обратной задачи кинематики о положении
с использованием предложенных аналитических выражений обладает
достаточной точностью, а также по сравнению с выражениями, полу-
ченными матричным методом, меньшей вычислительной сложностью.
Также предлагается итерационный метод определения законов
изменения обобщенных координат
)(
3
)(
2
,
ii
qq
, основанный на прави-
лах движения рабочего инструмента по траектории. Каждой горизон-
тальной линии, составляющей траекторию, соответствуют изменения
обобщенной координаты на определенном уровне. Значения шагов
между этими уровнями задаются переменными
32
, pp
∆
∆
, а значения
шагов по обобщенным координатам
32
, qq
∆
∆
. Предлагается уровни
изменения обобщенных координат (горизонтальные линии) поделить
на две части. При этом первая горизонтальная линия формируется
следующим образом:
( )
( ) ( )
( ) ( )
1
1
1
( 0)
;
,
i
j
i i
j j j
i i
j j j
if q
q q k q
else
q q k q
−
−
−
>
= + ⋅∆
= − ⋅∆
где
j
q
∆
– шаг по координатам
32
, qq
при
2, 3;
j
=
; i – номер опор-
ной точки траектории; 1=k при
1...trunc( 2)
i w
=
; 1−=k при
2