К компетенциям - через инноватику
Подождите немного. Документ загружается.


11
А. В. Богатырев, магистрант;
научный руководитель – канд. техн. наук, доц. А. А. Калинкин
Ижевский государственный технический университет
Разработка методики и экспериментального стенда
для исследования процесса электростатического преобразования
энергии в маховичных накопителях
©
В настоящее время эффективность работы энергосистемы Россий-
ской Федерации достаточно низка, так как большой и малой энерге-
тике присущи некоторые особенности:
• потребление энергии меняется в зависимости от времени суток;
• частота в сети станции постоянно скачет, что не может не ска-
заться на качестве энергии;
• наличие разветвленных сетей (большой энергетики), на обслу-
живание и ремонт которых затрачиваются немалые средства и в ко-
торых теряется до 40 % произведенной энергии.
Вследствие невозможности накопления электроэнергии в боль-
ших количествах приходится завышать установленную мощность
источника энергии для того, чтобы обеспечить покрытие пиков по-
требления, которые составляют несколько процентов от суточного
потребления. В остальное время мощность источника приходится
снижать, что экономически невыгодно, так как источник работает
в нерасчетном режиме и имеет низкий КПД и сверх того быстрее рас-
ходует свой ресурс работы и выходит из строя.
В настоящее время все чаще возникают проблемы с энергоснаб-
жением удаленных потребителей, потому что провода просто среза-
ют и сдают в пункты приема лома цветных металлов. Поэтому для
удаленных потребителей выгоднее иметь источник электроэнергии
непосредственно на месте потребления, и одним из вариантов реше-
ния этой проблемы является либо использование нетрадиционных
и возобновляемых источников энергии (НиВИЭ), либо аккумули-
рующих устройств, либо и тех и других вместе.
Рассмотрим вариант с аккумулирующими устройствами. Необхо-
димо отметить, что существующие на сегодняшний день аккумулято-
ры не в состоянии соответствовать всем требованиям, а именно:
– быть компактными;
– иметь возможно большее число циклов заряда-разряда;
– иметь возможно большую скорость заряда-разряда;
© Богатырев А. В., Калинкин А. А., 2009
12
– иметь большой срок службы;
– накапливать большие количества электроэнергии;
– иметь приемлемую стоимость.
Из всего многообразия аккумулирующих устройств этим требова-
ниям наиболее соответствуют накопители энергии, в которых в качест-
ве аккумулирующего элемента используется супермаховик. Такой на-
копитель энергии может использоваться как в большой, так и в малой
энергетике.
Главной и неотъемлемой частью устройств, использующих меха-
нический аккумулятор энергии, несомненно, является сам маховик.
Но необходимо еще устройство, которое бы маховик раскручивало,
а при необходимости и отбирало энергию. В разработанных и пред-
ложенных американской компанией Beacon Power моделях аккумуля-
торов преобразование электрической энергии в механическую и на-
оборот осуществляется посредством асинхронных или синхронных
обратимых машин. При этом время реакции таких систем на спады
и пики нагрузки составляет около 4 секунд, что достаточно быстро,
но не всегда позволяет использовать маховичные накопители в об-
ластях, где требуется более быстрый переход из одного режима
в другой.
Для достижения меньшего времени переключения, а также увели-
чения КПД аккумулирующего устройства предлагается использова-
ние электростатического способа преобразования энергии. Устройст-
во для преобразования такой энергии представляет собой три диска,
расположенных параллельно друг другу. Два диска расположены
неподвижно и снабжены пластинами, равномерно расположенными
радиально по всему периметру, как у электрофорной машины. Тре-
тий диск располагается соосно двум неподвижным и имеет возмож-
ность вращаться вокруг своей оси. На вращающемся диске, так же,
как и на не подвижных, расположены пластины. Раскручивание раз-
гоняющего устройства происходит посредством подачи напряжения
на пластины таким образом, чтобы пластины, расположенные на под-
вижном и неподвижных дисках, сначала притягивали друг друга,
а после прохождения отталкивали друг друга. Выбрав точно время
подачи импульса, при котором воздействие на диск будет макси-
мальным, можно получить установку, имеющую КПД больше, чем
если бы вместо пластин использовались электромагниты.
Для проверки работоспособности данной гипотезы было предложе-
но использовать простой для реализации, но позволяющий проследить
основные физические процессы экспериментальный стенд. Стенд яв-
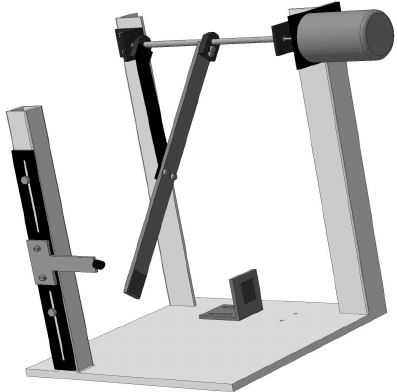
13
ляется физической моделью маховичного накопителя, и опыты, прове-
денные на данной экспериментальной установке, позволят рассчитать
и правильно подобрать геометрические и электрические параметры
реального устройства, исходя из оптимальных условий преобразования
энергии из механической в электрическую и наоборот. Схема испыта-
тельного стенда представлена на рис. 1.
Рис. 1. Схема испытательного стенда
Экспериментальный стенд предлагается выполнить как маятниковую
систему, имитирующую единичный фрагмент дискового устройства. В
маятнике на конце рычага закреплены пластины, представляющие собой
плоский конденсатор. Данным пластинам предварительно сообщен
электрический заряд от высоковольтного источника постоянного напря-
жения. Ось маятника установлена на подшипниках качения. Стенд ос-
нащен устройствами установки первоначального угла отклонения и дат-
чиком углового положения маятника. В начальный момент времени ма-
ятник отклоняется на определенный угол и фиксируется в этом
положении с помощью электромагнита, закрепленного на стойке стенда.
Напряжение с электромагнита снимается, и маятник начинает движение.
На основании стенда, в нижнем положении маятника, с двух сторон ус-
тановлены кронштейны с пластинами, которые так же, как и на маятни-
ке, представляют собой плоский конденсатор, и в момент прохождения

14
маятника между ними подается импульс таким образом, что неподвиж-
ные пластины приобретают заряд и возникает сила, влияющая на дви-
жение маятника. На оси маятника установлен датчик угла поворота, по-
зволяющий точно фиксировать все положения маятника.
Последовательные положения движения пластин и график подачи
напряжения на неподвижные пластины, позволяющие представить
процесс взаимодействия пластин на маятнике и на кронштейнах, ус-
тановленных на основании, приведены на рис. 2 и 3.
Рис. 2. График подачи напряжения на неподвижные пластины, закрепленные
на кронштейнах на основании стенда в моменты времени t
1
, t
2
, t
3
, t
4
Рис. 3. Последовательные положения движения пластин на маятнике
относительно неподвижных пластин в моменты времени t
1
, t
2
, t
3
, t
4
В момент времени t
1
маятник приближается к неподвижным пла-
стинам 1. В этот момент необходимо подать напряжение на них та-
ким образом, чтобы неподвижные пластины притягивали пластины
на маятнике. Под действием данного импульса маятнику сообщается
дополнительный импульс силы до момента, когда маятник достигает
нижней точки. В некоторый момент времени, не доходя до нижней
точки, заряд с пластин необходимо снять, и маятник в течение про-
межутка ∆t = t
2
– t
3
движется по инерции. Интервал ∆t зависит от то-
го, какое время необходимо, чтобы поменять заряд на пластинах на
противоположный. В момент времени t
3
на пластины подается на-
пряжение противоположного направления так, чтобы пластины, за-
крепленные на маятнике, отталкивались от неподвижных пластин.

15
Действие данного импульса заканчивается в момент t
4
, когда воздей-
ствие подвижных и неподвижных пластин становится незначитель-
ным. Выбор t
1
, t
2
, t
3
, t
4
зависит от размеров пластин.
Таким образом на стенде предполагается выполнить исследования
параметров преобразования энергии с целью их оптимизации для
получения максимального КПД. Планом эксперимента предусматри-
вается варьировать величину напряжения, а также амплитуду и время
импульса. Эффективность преобразования предлагается оценивать по
углу, на который отклоняется маятник при запуске его с определен-
ной высоты. Зная геометрические характеристики маятника и угол
отклонения, можно рассчитать энергию, полученную маятником от
импульса. Данные, полученные экспериментальным путем с помо-
щью предложенной установки и подтвержденные расчетами, будут
основой для разработки реального макета устройства рекуперации
энергии на основе электростатического взаимодействия.
Список литературы
1. Гулиа Н. В. В поисках энергетической капсулы. – М. : Дет. лит., 1986. –
143 с.
2. Справочник по проектированию электроэнергетических систем /
В. В. Ершевич, А. Н. Зейлигер, Г. А. Илларионов и др. / под ред. С. С. Роко-
тяна и И. М. Шапиро. – М. : Энергоатомиздат, 1985.
3. Гармаев Б. Электрические мельницы прогресса, или С мечтой о вечных
аккумуляторах // Компьютеpра. – 2004. – № 6.
4. Нуждин В. Н., Просвирнов А. А. Новая жизнь центрифуги или аккумули-
рование энергии // Атом. стратегия. – 2007. – № 27. URL:
http://www.proatom.ru/modules.php?name=News&file=article&sid=811 (дата об-
ращения: 26.08.2009).
И. М. Болдырев, студент;
научный руководитель – канд. техн. наук В. В. Закураев
Новоуральский государственный технологический институт
Мобильная автоматическая система измерения
параметров шероховатости
©
Уралвагонзавод (УВЗ) – производственное объединение, лидер оте-
чественного грузового железнодорожного машиностроения, обладаю-
© Болдырев И. М., Закураев В. В., 2009
16
щее мощным техническим и интеллектуальным потенциалом. Пред-
приятие является главным поставщиком танков для Российской армии.
В соответствии с Государственной программой вооружения на 2007–
2015 годы запланировано закупить 1 400 танков Т-90. Принятие такого
решения исходило из того, что эти машины можно считать современ-
ными. Однако Т-90 по ряду признаков (живучесть, подвижность, ко-
мандная управляемость) пока уступает зарубежным модернизирован-
ным танкам М1А2 SEP «Абрамс», «Леопард-2А6» и т. д. Существен-
ной проблемой является показатель живучести ствола танковой пушки,
т. е. способность выдерживать заданное количество выстрелов без
снижения баллистических характеристик ниже допустимой величины.
Живучесть ствола пушек танков М1А2 и «Леопард-2А6» определяется
700 выстрелами бронебойных подкалиберных снарядов, а российского
Т-90 – всего лишь 400 выстрелами. Одной из возможных и наиболее
объективных причин относительно низкого показателя живучести пушек
отечественных танков является нарушение микрогеометрии, опреде-
ляющей важнейшие эксплуатационные качества внутренней поверхно-
сти ствола пушек (износостойкость от стирания, прочность, химическая
стойкость). Иными словами, микрогеометрические характеристики по-
верхности влияют на надежность работы изделия.
Микрогеометрические параметры поверхности регламентированы
ГОСТ 2789–73 «Шероховатость поверхности. Параметры и характе-
ристики» [1]. Шероховатость поверхности – это совокупность неров-
ностей поверхности с относительно малыми шагами на базовой дли-
не. Измерение параметров шероховатости осуществляется при помо-
щи профилометров и профилографов. В настоящее время на УВЗ
измерение параметров шероховатости внутренней поверхности ору-
дий производится лишь с краев ствола пушек. Потому остро встает
вопрос об определении микрогеометрии в центральной части. Однако
при диаметре 125 мм и длине ствола в 6 000 мм досягаемость профи-
лометром удаленных его частей становится невыполнимой задачей
без применения дополнительных устройств.
Для разрешения данной проблемы может быть использована мо-
бильная автоматическая система, способная точно определить микро-
геометрические параметры в труднодоступных местах изделия. Мо-
бильный робот с компьютерным управлением состоит из базового,
сенсорного, электронно-коммуникационного, транспортного моду-
лей, привода размыкания контакта опоры датчика и ствола, а также
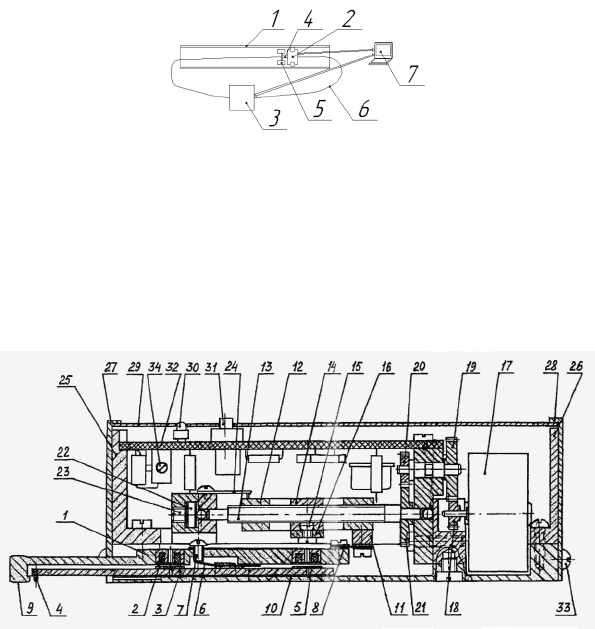
модуля управления. Структурная схема мобильного робота с компь-
ютерным управлением приведена на рис. 1.
17
Рис. 1. Структурная схема мобильного робота с компьютерным управле-
нием: 1 – ствол пушки; 2 – базовый модуль; 3 – электропривод; 4 – устройст-
во балансировки датчиков; 5 – первичный преобразователь; 6 – металличе-
ский трос; 7 – модуль управления
Базовый модуль 2 состоит из жесткой несущей рамы с отверстия-
ми для крепления транспортного модуля и устройства балансировки
датчиков 4.
Рис. 2. Первичный преобразователь: 1 – опора; 2 – катушка; 3 – коромыс-
ло; 4 – ощупывающая игла; 5 – якорь; 6 – плоская пружина; 7 – регулировоч-
ный винт; 8 – плоская пружина; 9 – рабочая часть опоры; 10 – основание;
11 – дистанционная планка; 12 – ползун; 13 – ходовой винт; 14 – гайка; 15 –
штифт; 16 – планка; 17 – ДПТ; 18, 19, 20, 21 – шестерни редуктора; 22 – пру-
жина; 23 – винт регулировочный; 24 – конечный выключатель; 25, 26 – угол-
ки; 27, 28 – крышки; 29 – П-образный кожух; 30 – светодиод; 31 – кнопка;
32 – плата; 33 – винты крепежные; 34 – резистор
Сенсорный модуль включает подсистему, состоящую из двух
контактных датчиков 5. Датчик (первичный преобразователь) вме-
сте с отсчетным устройством входит в комплект профилометра
«Абрис-ПМ7» (ООО «Абрис», Пенза). Первичный преобразователь
18
(см. рис. 2) предназначен для перемещения с постоянной скоростью
относительно измеряемой поверхности измерительного механизма
и преобразования линейных колебаний иглы, воспроизводящей не-
ровности измеряемой поверхности. Измерительный механизм дат-
чика через пружину 8 и дистанционную планку 11 прикреплен
к ползуну 12, который приводится в движение ходовым винтом 13
через гайку 14 и штифт 15, ввернутый в планку 16, которая жестко
закреплена на ползуне 12. Ходовой винт 13 приводится во вращение
электрическим двигателем постоянного тока 17 через двухступенча-
тый зубчатый редуктор, образованный шестернями 18, 19, 20 и 21.
Для функционирования мобильного робота потребуется лишь два
первичных преобразователя из двух комплектов профилометров.
Роль отсчетного устройства (ОУ) возьмет на себя ПК 7, обеспечи-
вающий выполнение всех функций ОУ, т. е. усиления и преобразова-
ния сигнала с первичного преобразователя, управления электропри-
водом измерительного устройства датчика, вычисления параметров
шероховатости измеряемой поверхности с выдачей результатов из-
мерения на устройство цифровой индикации. Таким образом, робот,
перемещаясь внутри ствола 1, будет осуществлять контроль парамет-
ров шероховатости при помощи контактных датчиков.
Электронно-коммуникационный модуль состоит из печатной пла-
ты и силового блока для подачи управляющих сигналов на электро-
двигатели с обратной связью.
Транспортный модуль включает электропривод 3, состоящий из
электродвигателя постоянного тока и механической передачи, которые
обеспечивают точное позиционирование робота в пределах рабочей зо-
ны. Мобильная система имеет три колеса, расположенные друг к другу
под углом 120
о
. Колеса оснащены пружинами для надежной установки
робота внутри ствола. Поступательное движение роботом осуществляет-
ся путем присоединения к нему с обеих сторон металлического троса 6 и
последующего перемещения в двух возможных направлениях.
Привод размыкания контакта опоры датчика и ствола включает
электродвигатель и механическую передачу, которые управляют
устройством балансировки датчиков. Принцип работы данной
подсистемы следующий. Робот, находясь на заданной точке, при-
нимает сигнал с системы управления на выполнение измеритель-
ных операций. Включается электродвигатель, приводящий в дви-
жение устройство с расположенными на нем первичными преоб-
разователями до тех пор, пока не выполнится балансировка
датчиков, т. е. при базировании на измеряемую поверхность рабо-

19
чая поверхность опоры 9 (см. рис. 2), вершина иглы 4 и рабочая
плоскость основания 10 должны находиться в одной плоскости.
Устройство имеет ограниченный радиус действия, поэтому при
неисправности датчиков не произойдет их контакта со стволом с
недопустимым усилием.
Управляющий модуль 7 состоит из управляющего компьютера
с программным обеспечением и служит для управления всеми ос-
тальными вышеперечисленными подсистемами. Согласно программе,
записанной в память компьютера, робот будет выполнять требуемые
функции с различными заданными параметрами (количество измере-
ний внутри ствола, шаг измерений, тип измеряемого параметра ше-
роховатости и т. д.).
Рассмотренная мобильная автоматическая система измерения па-
раметров шероховатости позволяет решить вопрос об обнаружении
микрогеометрических отклонений поверхности. Однако анализ этих
отклонений производится локально. Поэтому в дальнейшем имеет
смысл оснастить робота системой технического зрения, позволяющей
оператору подробно изучить состояние поверхности изделий и пре-
дупредить возникновение окалин и прочих дефектов.
Список литературы
1. ГОСТ 2789–73 Шероховатость поверхности. Параметры и характери-
стики.
В. И. Бурнышева, студентка;
научный руководитель – канд. техн. наук, доц. Ю. Р. Никитин
Ижевский государственный технический университет
Разработка SCADA-системы для управления
асинхронными двигателями
©
В настоящее время в нефтегазодобывающей, космической, маши-
ностроительной промышленности, в системах ЖКХ актуальной зада-
чей является поддержание заданного технологического параметра
(давления, температуры, влажности). Целесообразно для этих целей
использовать асинхронные двигатели, оснащенные преобразователя-
ми частоты.
© Бурнышева В. И., Никитин Ю. Р., 2009
20
Применение асинхронных двигателей с преобразователями часто-
ты является перспективным и экономически обоснованным способом
замены как регулируемого привода постоянного тока, так и нерегу-
лируемого привода переменного тока. Основными особенностями их
применения является обеспечение возможности регулирования ско-
рости в широком диапазоне, плавный разгон и торможение, защита
электродвигателя от всех типов перегрузок, энергосбережение до
60 %, увеличение срока службы механической и электрической час-
тей оборудования.
Использование ПИ-регулирования с обратной связью дает воз-
можность поддерживать стабильное значение заданного параметра.
Возникает типичная задача АСУ ТП, которую можно решить
стандартными методами программирования, но в этом случае про-
цесс создания программного обеспечения (ПО) становится недопус-
тимо длительным, а затраты на его разработку очень высокими. Се-
годня вариант с непосредственным программированием приемлем
лишь для простых систем или небольших фрагментов большой сис-
темы, для которых нет стандартных решений. В любом случае про-
цесс разработки собственного ПО важно упростить, сократить вре-
менные и прямые финансовые затраты на разработку ПО, минимизи-
ровать затраты труда программистов.
Таким образом, требуется создание все более развитых инстру-
ментальных средств типа SCADA-систем (Supervisory Control And
Data Acquisition).
Диспетчерское управление и сбор данных является основным
и в настоящее время остается наиболее перспективным методом ав-
томатизированного управления сложными динамическими систе-
мами (процессами) в жизненно важных и критичных с точки зрения
безопасности и надежности областях.
Разработка современной АСУ ТП требует больших вложений
и выполняется в длительные сроки. И именно поэтому в большинстве
случаев разработчикам управляющего ПО, в частности ПО для АСУ
ТП, представляется целесообразным осваивать и адаптировать какой-
либо готовый, уже испытанный универсальный инструментарий, ка-
ковым и являются SCADA-системы.
Функции SCADA-системы для управления асинхронными двига-
телями с преобразователем частоты, предназначенной для дистанци-
онного сбора информации:
– сбор данных с датчиков технологического оборудования;
– отображение на экране монитора технологического процесса;