Ипатов В.П. Широкополосные сигналы
Подождите немного. Документ загружается.

67
стороны, из соотношения (2.71) видно, что амплитуда сигнала на выходе согласованного
фильтра, настроенного на частоту
i
Ff
0
, принимает значение
)(
i
FZ
(пренебрегая коэф-
фициентом) в момент окончания сигнала
T
. Таким образом, может быть использована
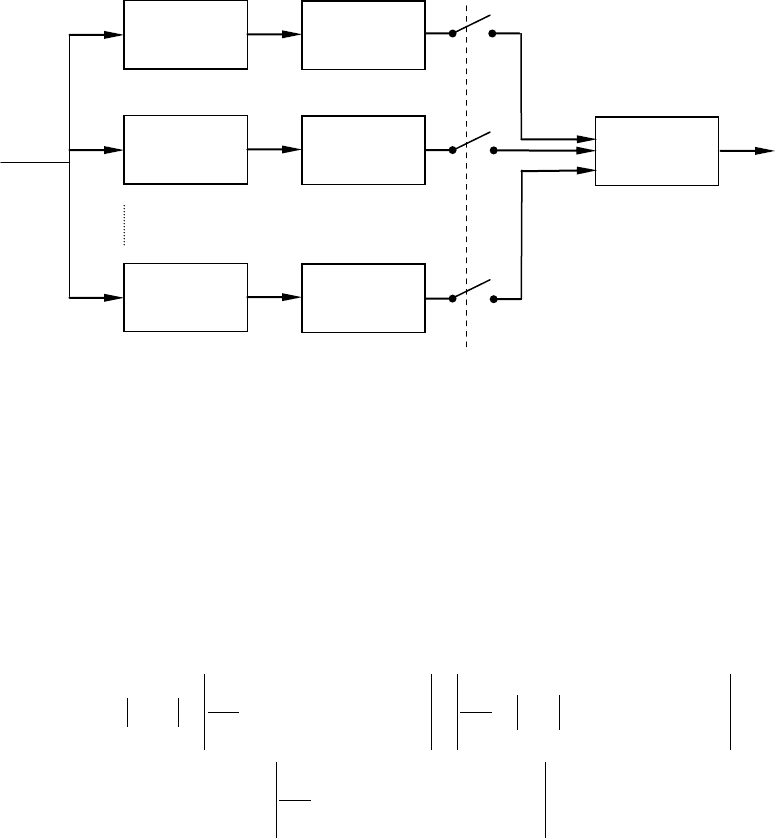
альтернативная структура (см. рис. 2.22), содержащая набор из
M
согласованных фильт-
ров, причем
i
–й фильтр должен быть настроен на частоту, отличающуюся от номиналь-
ной
0
f
, на величину
i
F
. После амплитудного детектирования и взятия отсчета в момент
времени
T
на выходах детекторов имеется множество значений
)(
i
FZ
, наибольшее из ко-
торых выбирается для получения МП оценки
F
ˆ
как значение частотного рассогласования
фильтра, отвечающего максимуму
)(
i
FZ
. Ясно, что в случае непрерывного параметра
F
необходима операция квантования, а число фильтров
M
определяется допустимой ошиб-
кой квантования.
Согласно соотношению (2.59) точность измерения частоты определяется не только
отношением сигнал-шум, но также и остротой корреляции между сдвинутыми по частоте
копиями сигнала в зависимости от их взаимного частотного рассогласования. В связи со
случайностью фазы рассмотрению подлежат комплексные огибающие, и сходство между
их частотно-сдвинутыми копиями
)0;(tS
и
);( FtS
характеризуется модулем коэффици-
ента корреляции (2.44)
dtFtjtS
E
dtFtStS
E
FF )2exp()(
2
1
);()0;(
2
1
)()(
2
*
0
dtFtjtS
E
)2exp()(
2
1
2
. (2.73)
Как видно, зависимость коэффициента корреляции как функции
F
повторяет по
форме амплитудный спектр квадрата вещественной огибающей сигнала. Поскольку веще-
ственная огибающая, т.е. закон амплитудной модуляции, всегда является низкочастотным
сигналом, то из свойств преобразования Фурье следует, что, чем длиннее сигнал, тем ост-
рее
)(
0
F
. Подходящим названием протяженности
)(
0
F
вдоль оси частот может слу-
жить термин «ширина огибающей по частоте» (envelope frequency spread). Обозначив
данный параметр через
e
F
, из только что упомянутого факта следует, что
TF
e
/1
. Таким
образом, помимо «прямого» способа, т.е. увеличением энергии, можно повысить точность
)(ty
Выбор
max
СФ
F
1
Детектор
огибающ.
Рис. 2.22. Реализация МП оценки частоты на основе СФ.
СФ
F
2
Детектор
огибающ.
СФ
F
M
Детектор
огибающ.
Отсчет
t=T
F
ˆ

68
измерения частоты за счет применения сигнала, обладающего достаточно компактным
спектром огибающей (малым значением
e
F
), т.е. достаточно большой длительностью
T
.
Формально этот вывод снова может быть получен на основе оценки второй производной
)(F
и подстановки результата в границу Крамера-Рао (2.59)
22
)2(
1
}
ˆ
{
qT
FD
rms
,
где среднеквадратическая длительность
rms
T
характеризует протяженность сигнала во
времени точно так же, как полоса
rms
W
описывает протяженность спектра сигнала.
В заключение можно упомянуть о двух физических аспектах приведенной выше
точки зрения. Во-первых, повышение точности за счет увеличения длительности
T
легко
объяснимо: частота может рассматриваться как скорость изменения угла полной фазы, и,
как и любая скорость, измеряется более надежно тогда, когда приращение угла наблюда-
ется в течение большого интервала. Во-вторых, в сравнении частотного и временного из-
мерений явным образом проявляется частотно-временная дуальность. Действительно, в то
время как точность временного измерения определяется протяженностью сигнала в час-
тотной области (шириной полосы
W
), точность частотного измерения контролируется
протяженностью сигнала во временной области (длительностью
T
).
Приведенный выше результат приводит нас к выводу, что в случае, когда единст-
венным информативным параметром является частота сигнала, отсутствуют импульсы к
привлечению технологии распределенного спектра, поскольку, помимо увеличения энер-
гии, только длительность сигнала оказывает влияние на точность оценивания. Данный
факт объясняет частое применение в доплеровских радарах измерения скорости простей-
ших немодулированных непрерывных гармонических сигналов.

69
2.14. Одновременное оценивание времени запаздывания и частоты.
В рамках следующей задачи имеет место ситуация, когда как временной
, так и
частотный
F
сдвиги принятого сигнала являются неизвестными и информативными па-
раметрами, т.е. подлежащими измерению. Данная постановка охватывает многие практи-
ческие ситуации. В цифровой связи, например, системах мобильной связи 2-го и 3-го по-
колений, процедура приема, как правило, начинается с синхронизации собственного
опорного сигнала с принятым. Данная операция заключается в измерении частотно-
временного рассогласования собственного генератора с принятым сигналом и последую-
щей частотно-временной подстройки первого со вторым до полной их синхронизации. В
радиолокации одновременное определение расстояния и скорости цели относительно при-
емника требует оценивания временного запаздывания и доплеровского смещения частоты
сигнала. В навигации, например системе GPS, во многом аналогичные измерения служат
исходными данными для определения местоположения и скорости пользователей. Пере-
чень примеров может быть продолжен и далее.
В отличие от материала, рассмотренного в 2.9-2.13, параметром, который необхо-
димо оценить, является двумерный вектор
),( F
, а не скаляр. Соответственно и мо-
дель принятого сигнала сочетает в себе особенности обоих его представлений, описанных
в 2.12 и 2.13:
)exp()2exp(),;(Re);,;(
0
jtfjFtSFts
,
где
)2exp()(),;( FtjtSFtS
– комплексная огибающая, включающая в себя как вре-
мя запаздывания, так и частотный сдвиг; а
– как и ранее, не информативная начальная
фаза. Очевидно, что теперь правило максимума корреляции для оценки
F,
формулиру-
ется с использованием модуля корреляции вида
TT
dtFtjtStYdtFtStYFZ
0
*
0
*
)2exp()()(),;()(),(
, (2.74)
которое показывает, насколько близко комплексная огибающая сигнала
),;( FtS
, сдви-
нутая по времени и частоте, подобна наблюдаемой комплексной огибающей
)(tY
. Опре-
деление
и
F
, максимизирующих указанное подобие, обеспечивает получение пары МП
оценок
F
ˆ
,
ˆ
, а именно
),(max)
ˆ
,
ˆ
(
,
FZFZ
F
.
Как и ранее, построение устройства оценивания возможно на основе набора корре-
ляторов, опорными сигналами которых служат копии
)2exp()(),;( FtjtSFtS
с раз-
личными значениями
и
F
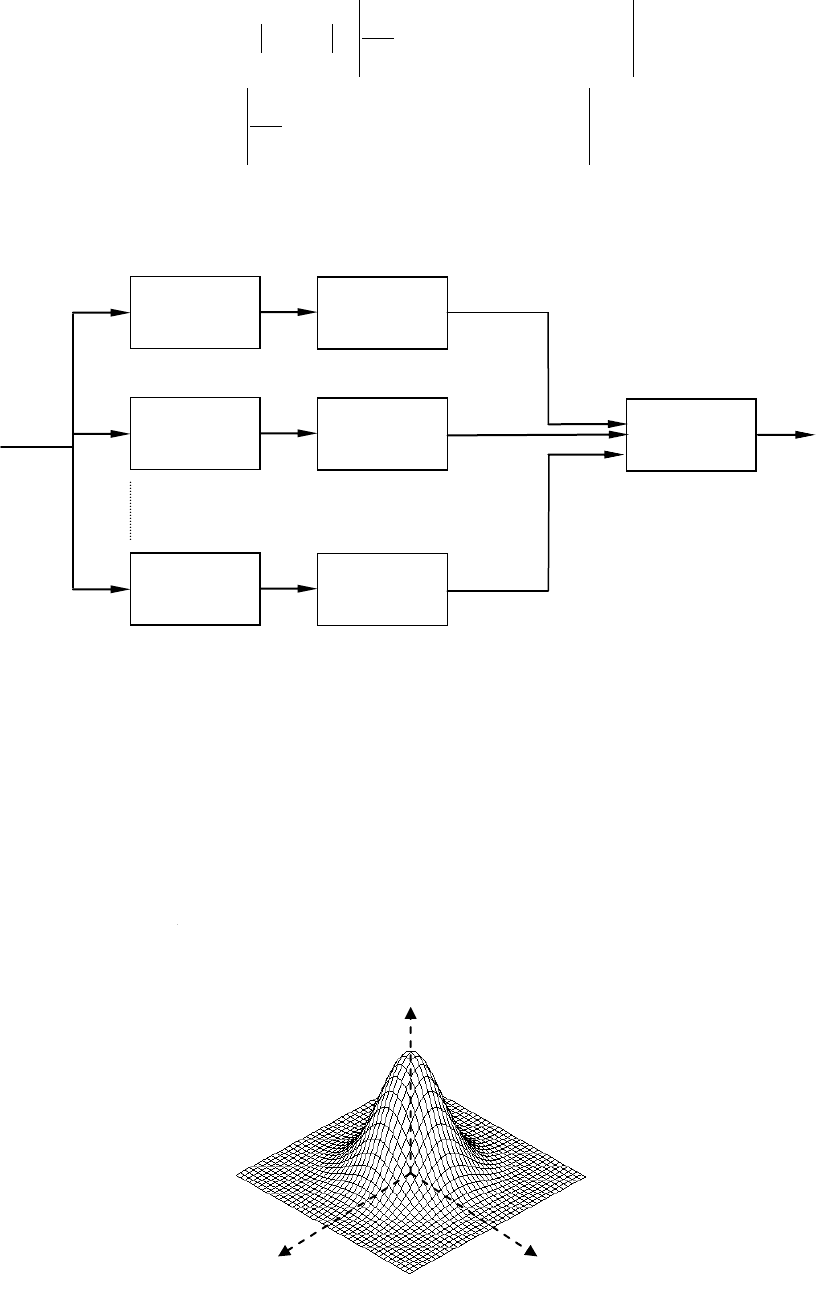
. Однако более практичной является схема с использованием
согласованных фильтров, которая приведена на рис. 2.23 и объединяет структуры на рис.
2.22 и 2.19, a. Вид ее непосредственно определяется результатом сравнения соотношений
(2.74) и (2.71), которое показывает, что
),( FZ
(без учета постоянного сомножителя) по-
вторяет вещественную огибающую на выходе согласованного фильтра, имеющего рас-
стройку по частоте, равную
F
. В схеме используются
M
ветвей, содержащих фильтр и
детектор. Каждая из ветвей настроена на свою конкретную частоту, обеспечивая тем са-
мым оценивание
F
, тогда как оценка
получается фиксированием точки максимума
сигнала с выхода детектора. Блок «Выбор max» одновременно выполняет обе указанные
операции, фиксируя момент достижения глобального максимума среди выходных значе-
ний всех ветвей. Затем это значение времени (после вычитания длительности сигнала)
принимается в качестве оценки
ˆ
, тогда как частота настройки ветви, на выходе которой
регистрируется глобальный максимум, дает оценку
F
ˆ
.
Точность оценивания зависит от скорости, с которой падает похожесть между рас-
согласованными по времени и частоте копиями
)0,0;(tS
и
),;( FtS
комплексной оги-
70
бающей сигнала с ростом
F,
. Иными словами, точность определяется остротой пика
модуля корреляционного коэффициента, задаваемого (2.44)
dtFtStS
E
FF ),;()0,0;(
2
1
),(),(
*
0
dtFtjtStS
E
)2exp()()(
2
1
*
, (2.75)
как функции двух переменных
F,
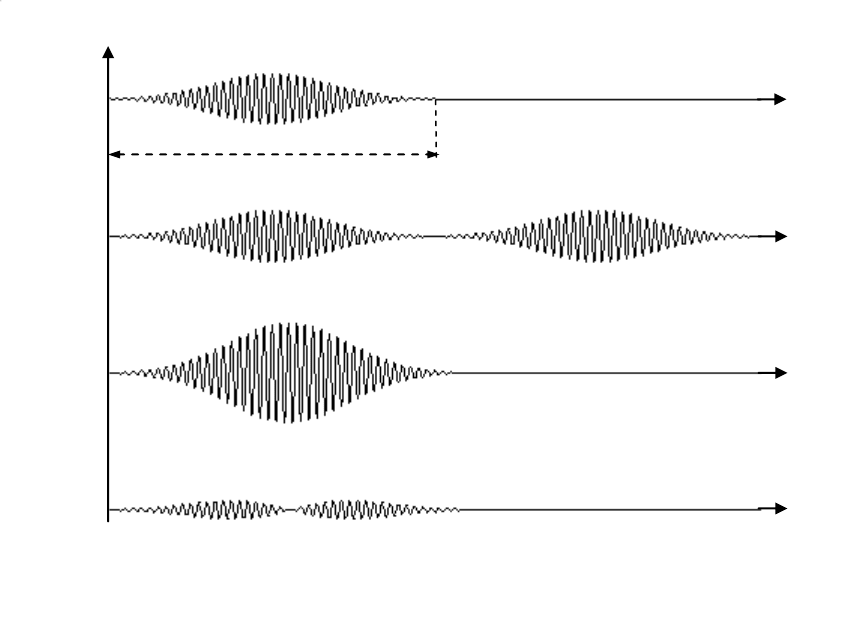
. Эта функция, часто называемая функцией неопреде-
ленности (ФН) Вудворда, играет исключительно важную роль в теории сигналов. Геомет-
рически ее можно изобразить в виде трехмерной поверхности над плоскостью
F,
,
имеющей максимум, равные единице, в начале координат:
1)0,0(),(
00
F
. Пример-
ный вид функции неопределенности дает рис. 2.24.
)(ty
Выбор
max.
СФ
F
1
Детектор
огибающ.
Рис. 2.23. Схема МП оценивания временной задержки и частоты на основе СФ.
СФ
F
2
Детектор
огибающ.
СФ
F
M
Детектор
огибающ.
F
ˆ
),(
0
F
F
1
Рис. 2.24. Пример функции неопределенности.

71
При
0F
сигнальные копии рассогласованы только во времени и, в соответствие с
этим, функция неопределенности (2.75) превращается в АКФ (2.72), взятую по абсолют-
ной величине:
)()0,(
00
. С другой стороны, в отсутствии временного сдвига
0
сигнальные копии рассогласованы только по частоте, и функция неопределенности стано-
вится спектром (2.73) квадрата амплитудного закон модуляции сигнала:
)(),0(
00
FF
.
Другими словами, АКФ сигнала и спектр квадрата огибающей представляют собой сече-
ния функции неопределенности вертикальными плоскостями
0,0 F
соответственно.
Возвращаясь к схеме, представленной на рис.2.23, можно заметить, что в случае отсутст-
вия шума сигнал в
i
–м канале воспроизводит в реальном времени сечение функции неоп-
ределенности вертикальной плоскостью
i
FF
.
Как следует из вышеприведенных рассуждений единственным свободным от энер-
гетических затрат источником повышения точности частотно-временного оценивания
служит остроты функции неопределенности. ФН должна достаточно быстро спадать в
любом направлении плоскости
F,
при отсутствии априорных сведений о возможных
значениях
F,
. Одним из практичных способов, пригодных для характеристики крутизны
),(
0
F
, является использование ее горизонтального сечения (называемого диаграммой
неопределенности (ambiguity diagram)) на некотором фиксированном уровне, например,
равном 0.5. Рис.2.25 служит примером такого сечения. Поскольку протяженность двух ос-
новных сечений
)(
0
и
)(
0
F
определяется временем корреляции
)/1( W
c
и частот-
ной протяженностью огибающей
)/1( TF
e
, то эти характеристики автоматически опре-
деляют размеры сечения по осям
F,
. Очевидно, что чем острее функция неопределенно-
сти, тем меньше площадь диаграммы неопределенности. Последняя пропорциональна
произведению
WTF
ec
/1
, что влечет за собой следующее утверждение: только сигналы
с распределенным спектром позволяют повысить точность оценивания временного за-
паздывания (частоты) без ухудшения точности измерения частоты (времени запаздыва-
ния). Действительно, для любого простого сигнала
1WT
и, следовательно,
1
ec
F
, так
что достичь значительной крутизны функции неопределенности вдоль одного направле-
ния (например,
) невозможно иначе, как одновременным растяжением ее вдоль другого
направления (
F
).
При использовании сигналов с распределенным спектром существует возможность
избежать противоречия между протяженностями
ec
F,
функции неопределенности или,
что эквивалентно, между длительностью сигнала и шириной его полосы, аналогично то-
му, как это имело место в 2.12. Применение особым образом выбранного закона угловой
2/
e
F
2/
e
F
2
c
2
c
F
Рис. 2.25. Сечение функции неопределенности.
72
модуляции определяет полосу сигнала
W
(время корреляции
c
) и посредством этого
точность временного измерения, тогда как выбор соответствующей длительности сигнала
может быть осуществлен независимо, что гарантирует необходимую точность частотного
измерения.
Сравнение утверждения, к которому только что пришли, со сделанными в преды-
дущих главах, показывает, что среди всех до сих пор рассмотренных классических задач
приема одновременное оценивание времени и частоты является первой, в которой обра-
щение к философии распределенного спектра является категорически необходимым. Не
существует других средств для бесконфликтного выполнения требований высокой точно-
сти оценивания, как по времени, так и по частоте иных, чем привлечение сигналов с рас-
пределенным спектром.
2.15. Разрешение сигналов.
Для многих практических приложений чрезвычайно типичной является ситуация,
когда принятый сигнал фактически представляет собой суперпозицию многих копий ис-
ходного «чистого» сигнала, каждая из которых характеризуется своими значениями ам-
плитуды, фазы, временем запаздывания и сдвигом частоты. Перекрываясь во времени, эти
копии интерферируют между собой, образуя достаточно сложный результирующий сиг-
нал, что часто затрудняет извлечение необходимой информации. Процедура, направлен-
ная на разделение интерферирующих сигнальных копий или нейтрализацию их взаимного
вредного взаимодействия получила наименование разрешения сигналов. В зависимости
оттого, что является конечной целью, могут существовать различные пути решения дан-
ной задачи в рамках классического подхода к приему сигналов. Все из них, тем не менее,
снова базируются на категории расстояния между копиями сигнала или сходства.
Для лучшего восприятия идеи решения данной проблемы обратимся к наиболее
показательному случаю временного разрешения сигналов. Начнем с полосного сигнала
)]2exp()(Re[)(
0
tfjtSts
и предположим, что на вход приемника поступают две его ко-
пии, имеющие одинаковые амплитуды, но различное время запаздывания
0
1
и
2
на входе приемника. Тогда колебание суперпозиции
)}2exp()]()(Re{[)()()(
0
tfjtStStststs
r
строго определяется взаимным временным сдвигом
, а не длительностью сигнала
T
и
несущей частотой, как и «тонкими» деталями модуляции сигнала. Рис. 2.26 демонстриру-
ет несколько ситуаций на примере простого импульса с плавной огибающей: диаграмма a
отвечает «собственно чистому сигналу», тогда как три остальных соответствуют различ-
ным значениям
, выраженным в терминах несущей частоты
0
f
.
В случае, когда различие во времени
превышает длительность сигнала
T
(диа-
грамма b), разрешение сигналов не вызывает проблем, поскольку копии сигнала полно-
стью разнесены во времени и наблюдатель способен определить, что на входе присутст-
вуют две копии. Очевидно, что в данной ситуации отсутствуют интерференционные эф-
фекты и, если, помимо временной позиции, некоторые другие параметры сигнала пред-
ставляют интерес, то информация о них может быть извлечена из каждой копии без вся-
ких затруднений.
Другая ситуация имеет место, когда сигналы полностью перекрываются. Тогда ин-
терференция может привести либо к усилению результирующего сигнала (если сигналь-
ные копии близки по фазе, диаграмма c), либо к его ослаблению (если отличие по фазе
между копиями близко к
, диаграмма d). Возможные трудности для наблюдателя оче-
видны, учитывая, что принятое колебание всегда искажено канальным шумом. Он либо с
трудом сможет распознать присутствие в принятом сигнале более чем одной копии (и
быть в полной уверенности, что интерференция не исказила извлеченную информацию
73
(с)), либо окажется в ситуации чрезмерно низкого отношения сигнал-шум (d).
Сценарии подобного рода широко распространены в системах, связанных с переда-
чей и сбором информации. Физическим основанием рассмотренного явления служат ог-
раниченная полоса канала и многолучевое распространение сигнала. Последнее детально
будет обсуждаться в 3.5. Теперь же лишь кратко рассмотрим некоторые характерные при-
меры. В цифровой связи наиболее часто встречающимися и опасными являются следую-
щие два вида канальных искажений: межсимвольная интерференция – intersymbol interfe-
rence (МСИ) и фединг (fading). Они имеют общую природу, поскольку являются результа-
том линейного суммирования множества взвешенных и задержанных во времени копий
сигнала. В том случае, когда диапазон задержек сравним со временем корреляции сигнала
или, что эквивалентно, передаточная функция канала является полностью неравномерной
в пределах спектра сигнала, принятая суперпозиция оказывается существенно искаженной
относительно исходного сигнала, что типично для МСИ или частотно-селективного ис-
кажения (frequency-selective fading). Неселективный или медленный (flat) фединг имеет
место тогда, когда задержки копий сигнала отличаются незначительно в сравнении со
временем корреляции сигнала (передаточная функция канала близка к равномерной), од-
нако достаточно, чтобы вызвать паразитный взаимный фазовый сдвиг, приводящий к
ощутимым потерям в мощности результирующего сигнала. Очевидно, что задача разре-
шения, т.е. эффективного разделения сдвинутых во времени копий сигнала, непосредст-
венно связана с задачей подавления МСИ.
Аналогичным образом, в радиолокации принимаемое колебание может быть обра-
зовано множеством сдвинутых во времени копий сигнала, образованных в результате от-
ражения излученного импульса от множества целей. Одним из основных предназначений
радиолокатора является определение числа целей, расположенных в определенном на-
правлении пространства, и измерение расстояний до них. Сразу же становится очевид-
ным, что сценарий, описываемый рис.2.26, b, наиболее прост с рассматриваемой точки
зрения, тогда как ситуации, когда взаимное расстояние между целями достаточно мало,
t
t
t
t
0
/20 fT
0
/20 f
0
/4 f
0
/5.4 f
a)
b)
c)
d)
Рис. 2.26. Иллюстрация к задаче временного разрешения.
74
приводят к перекрытию отраженных сигналов (рис.2.26, c, d), что и подтверждает необхо-
димость задачи разрешения.
Множественность путей распространения сигналов типична и для навигационных
задач. Многие системы наземного базирования основаны на использовании ионосферного
отражения колебаний длинно- и средневолнового диапазона. Вследствие этого земная по-
верхность и ионосферный слой образуют волной канал, по которому распространение
сигналов может осуществляться различными путями. Аналогичная проблема характерна и
для систем космического базирования, поскольку помимо прямого сигнала со спутника на
вход приемника могут поступать сигналы, образованные отражением от окружающих
объектов (например, корабельных мачт или палубных сооружений). Все указанные ситуа-
ции хорошо укладываются в рамки задачи разрешения.
Анализируя рис. 2.26, не удивительно прийти к заключению, что достижение хо-
рошего временного разрешения возможно на пути использования коротких сигналов.
Очевидно, что укорочение сигнала может служить решением задачи, однако остаются в
силе ограничения, достаточно полно обсужденные в 2.12. Достижение высокой разре-
шающей способности невозможно добиться простым уменьшением длительности сигнала,
поскольку для сохранения необходимого отношения сигнал-шум требуется обеспечить
пропорциональное увеличение пиковой мощности. Следовательно, ограничения на пико-
вую мощность делают указанную простейшую стратегию не столь привлекательной.
К счастью, существует альтернативный и более элегантный путь решения задачи
разрешения сигналов во времени, уже рассмотренный ранее. Точно так же, как и в случае
измерения временного положения сигнала, разрешающая способность определяется не
длительностью самого сигнала, а протяженностью его АКФ, поскольку очищение сигнала
от шума согласованным фильтром может рассматриваться как составная часть любой
процедуры приема. Следовательно, требование малости времени корреляции
c
или ост-
роты АКФ диктуется необходимостью разрешения во времени, повторяя тем самым обос-
нованность выдвижения подобного требования, впервые сформулированного в задаче
оценивания временного запаздывания. Выполнив это требование, можно допустить пере-
крытие сдвинутых во времени копий сигнала и их интерференцию, однако, если времен-
ной сдвиг между копиями
превышает время корреляции
c
, отклики на выходе согла-
сованного фильтра не будут перекрываться, т.е. могут быть разрешены. В итоге снова
приходим к идее, высказанной в 2.12. Необходимая энергия сигнала (отношение сигнал-
шум) обеспечивается большой длительностью сигнала
T
, позволяя удовлетворить огра-
ничениям на пиковую мощность, тогда как достаточно малое время корреляции
T
c
достигается соответствующим выбором внутренней угловой модуляции. Тогда эффект
временного сжатия в согласованном фильтре способен обеспечить разделение перекры-
вающихся сигнальных копий, т.е. их разрешение. Потенциально это достижимо только
при использовании сигналов с распределенным спектром, для которых
1/
c
TWT
.
Следовательно, можно дословно повторить вывод, сделанный в 2.12, в приложении
к разрешению во времени. Если отсутствуют ограничения на пиковую мощность, задача
разрешения сигналов не требует обязательного обращения к технологии распределенно-
го спектра. Однако, распределение спектра является насущной потребностью при наложе-
нии жестких ограничений на пиковую мощность.
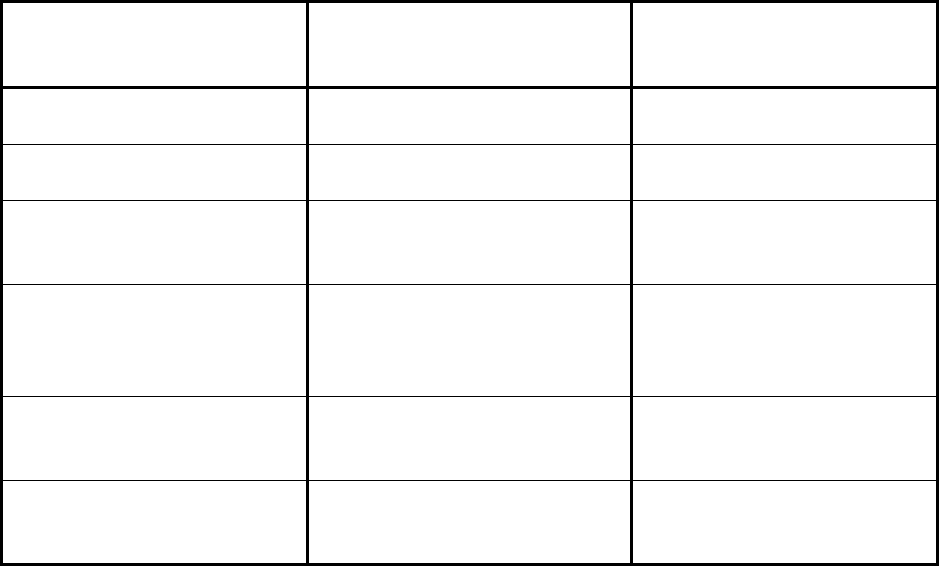
Рис. 2.27 демонстрирует две показательные ситуации, смоделированные в среде
программирования Matlab. Колонка a) содержит простой одиночный импульс
)(ts
с глад-
кой огибающей, его сдвинутую на
копию
)( ts
, значительно перекрывающуюся с ис-
ходным сигналом
)(ts
, суперпозицию
)(ts
и
)( ts
на входе согласованного фильтра и
отклик фильтра. Колонка b) содержит аналогичные диаграммы для импульса с распреде-
ленным спектром (с линейной частотной модуляцией) той же длительности и энергии.
При одинаковой в обоих случаях временной задержки сигнальной копии второй вариант
демонстрирует отличное качество разрешения – две сигнальные копии полностью разде-

75
ляются тогда, как первый вариант свидетельствует о невозможности разрешения сигна-
лов.
Выше представленная концепция разрешения во времени легко может быть рас-
пространена и на другие параметры. Если перекрываются несколько сигнальных копий,
отличающихся только частотным сдвигом, то возникает задача разрешения по частоте,
решение которой определяется коэффициентом корреляции (2.73), аналогично случаю
оценивания частоты. Очевидно, что в данном случае отсутствуют причины к применению
технологии распределенного спектра (см. параграф 2.13). Если же копии сигналов отли-
чаются как временным, так и частотным сдвигом, то процедура частотно-временного раз-
решения и ее качество определяются функцией неопределенности (2.75). Как и в случае
частотно-временного измерения (см. 2.14), данная ситуация требует обращения к техноло-
гии распределенного спектра: ни один из других способов не может гарантировать получе-
ние остроконечной функции неопределенности в любом направлении плоскости
F,
.
И в заключение параграфа упомянем также о многочисленных ситуациях про-
странственного разрешения, когда сигнальные копии, поступающие на приемную антен-
ну, приходят с различных направлений и задача наблюдателя заключается в раздельной
обработке каждой копии. Именно сама антенна (или антенны, включая и передающую)
a)
b)
Рис 2.27. Задача разрешения во времени: простой (a)
и широкополосный (b) сигналы.
76
играет роль пространственного сигнала, а синтез «сигнала» состоит в наиболее эффектив-
ной комбинированной обработке принятых колебаний элементами антенны. Многие по-
ложения процедуры разрешения во времени приложимы также и к проблеме пространст-
венного разрешения.
2.16. Заключение.
В данной главе кратко были рассмотрены основные процедуры приема сигналов:
обнаружение, различение, оценивание параметров и разрешение. В соответствие с класси-
ческой формулировкой приема во всех рассмотренных задачах была принята модель гаус-
совского аддитивного шума, и в рамках этого идеализированного подхода основной це-
лью являлось выяснение необходимости привлечения технологии распределенного спек-
тра. Выводы, приведенные в таблице 2.1, содержат перечень параметров сигнала, которые
определяют качество выполнения каждой из специфических процедур, и указания на при-
влечение распределенности спектра в случае, когда желательно улучшение характеристик
процедуры без увеличения энергетических затрат.
Как показывает содержимое таблицы, будет неправильно сказать, что классические
задачи приема в значительной степени обращены к философии распределенного спектра.
Только одновременное частотно-временное оценивание и разрешение дают явный им-
пульс к ее применению. Это может показаться очень странным и оспаривающим утвер-
ждения о широкой популярности распределенности спектра в настоящее время. Как будет
показано в следующих главах, эти основания вполне обоснованы и явно проявляют себя
всякий раз, когда исследования основываются на более реалистичной модели канала, чем
несколько «академичной» гауссовской, или вызывают необходимость привлечения неко-
торых иных, дополнительных критериев качества.
Таблица 2.1. Роль сигналов с распределенным спектром в классических задачах приема.
Задача.
Параметры сигнала, опреде-
ляющие качественные ха-
рактеристики.
Необходимость привлече-
ния сигналов с распреде-
ленным спектром.
Обнаружение, амплитуд-
ные и фазовые измерения.
Отношение сигнал-шум
(только энергия сигнала).
Нет необходимости.
Бинарная передача данных
(M=2)
Отношение сигнал-шум,
коэффициент корреляции.
Нет необходимости.
М–ичная передача данных,
M>2
Отношение сигнал-шум,
коэффициент корреляции
всех сигналов.
Нет необходимости, но
иногда привлекательно в
реализационном плане.
Измерение запаздывания и
разрешение во времени.
Отношение сигнал-шум,
полоса сигнала.
Нет необходимости при
отсутствии ограничений на
мощность, в противном
случае необходимо.
Измерение частотного
сдвига, разрешение по час-
тоте.
Отношение сигнал-шум,
длительность сигнала.
Нет необходимости.
Частотно-временные изме-
рения, разрешение по вре-
мени и частоте.
Отношение сигнал-шум,
полоса и длительность
сигнала.
Необходимо.