Hirsch M., Smale S., Devaney R., Differential Equations, Dynamical Systems, and an Introduction to Chaos
Подождите немного. Документ загружается.


146 Chapter 7 Nonlinear Systems
U
3
(t) =
1
0
+
t
0
−s
−1 + s
2
/2
ds =
1 − t
2
/2
−t + t
3
/3!
U
4
(t) =
1 − t
2
/2 + t
4
/4!
−t + t
3
/3!
and we see the infinite series for the cosine and sine functions emerging from
this iteration.
Now suppose that we have two solutions Y (t ) and Z (t) of the differential
equation X
= F(X), and that Y (t) and Z(t) satisfy Y (t
0
) = Z(t
0
). Suppose
that both solutions are defined on an interval J . The existence and uniqueness
theorem guarantees that Y (t ) = Z (t ) for all t in an interval about t
0
, which
may a priori be smaller than J . However, this is not the case. To see this,
suppose that J
∗
is the largest interval on which Y (t) = Z(t ). Let t
1
be an
endpoint of J
∗
. By continuity, we have Y (t
1
) = Z (t
1
). The theorem then
guarantees that, in fact, Y (t ) and Z (t ) agree on an open interval containing t
1
.
This contradicts the assertion that J
∗
is the largest interval on which the two
solutions agree.
Thus we can always assume that we have a unique solution defined on a
maximal time domain. There is, however, no guarantee that a solution X(t )
can be defined for all time, no matter how “nice” F(X) is.
Example. Consider the differential equation in
R given by
x
= 1 + x
2
.
This equation has as solutions the functions x(t ) = tan(t + c) where c is a
constant. Such a function cannot be extended over an interval larger than
−c −
π
2
<t<−c +
π
2
since x(t ) →±∞as t →−c ± π /2.
This example is typical, for we have
Theorem. Let U ⊂
R
n
be an open set, and let F : U → R
n
be C
1
. Let X(t)
be a solution of X
= F(X) defined on a maximal open interval J = (α, β) ⊂ R
with β < ∞. Then given any closed and bounded set K ⊂ U , there is some
t ∈ (α, β) with X(t) ∈ K.
This theorem says that if a solution X(t) cannot be extended to a larger time
interval, then this solution leaves any closed and bounded set in U . This implies

7.3 Continuous Dependence of Solutions 147
that X (t ) must come arbitrarily close to the boundary of U as t → β. Similar
results hold as t → α.
7.3 Continuous Dependence of Solutions
For the existence and uniqueness theorem to be at all interesting in any physical
(or even mathematical) sense, this result needs to be complemented by the
property that the solution X (t) depends continuously on the initial condition
X(0). The next theorem gives a precise statement of this property.
Theorem. Consider the differential equation X
= F(X) where F : R
n
→ R
n
is C
1
. Suppose that X (t ) is a solution of this equation which is defined on the
closed interval [t
0
, t
1
] with X(t
0
) = X
0
. Then there is a neighborhood U ⊂ R
n
of X
0
and a constant K such that if Y
0
∈ U , then there is a unique solution Y (t )
also defined on [t
0
, t
1
] with Y (t
0
) = Y
0
. Moreover Y (t ) satisfies
|Y (t ) − X(t)|≤K |Y
0
− X
0
|exp(K (t − t
0
))
for all t ∈[t
0
, t
1
].
This result says that, if the solutions X(t ) and Y (t ) start out close together,
then they remain close together for t close to t
0
. While these solutions may
separate from each other, they do so no faster than exponentially. In particular,
since the right-hand side of this inequality depends on |Y
0
− X
0
|, which we
may assume is small, we have:
Corollary. (Continuous Dependence on Initial Conditions) Let
φ(t , X) be the flow of the system X
= F (X) where F is C
1
. Then φ is a
continuous function of X .
Example. Let k>0. For the system
X
=
−10
0 k
X,
we know that the solution X(t) satisfying X (0) = (−1, 0) is given by
X(t ) = (−e
−t
, 0).
For any η = 0, let Y
η
(t) be the solution satisfying Y
η
(0) = (−1, η). Then
Y
η
(t) = (−e
−t
, ηe
kt
).
148 Chapter 7 Nonlinear Systems
X(t)
⫺1
(⫺1, g
3
)
Yg
3
(t)
Yg
2
Yg
1
g
3
e
k
r
g
2
e
k
r
g
1
e
k
r
⫺e
⫺r
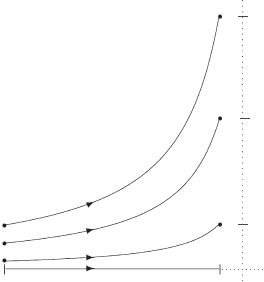
Figure 7.1 The solutions Y
η
(t) separate
exponentially from X (t) but nonetheless
are continuous in their initial conditions.
As in the theorem, we have
|Y
η
(t) − X(t )|=|ηe
kt
− 0|=|η − 0|e
kt
=|Y
η
(0) − X(0)|e
kt
.
The solutions Y
η
do indeed separate from X (t ), as we see in Figure 7.1, but
they do so at most exponentially. Moreover, for any fixed time t , we have
Y
η
(t) → X(t)asη → 0.
Differential equations often depend on parameters. For example, the har-
monic oscillator equations depend on the parameters b (the damping constant)
and k (the spring constant). Then the natural question is how do solutions of
these equations depend on these parameters? As in the previous case, solutions
depend continuously on these parameters provided that the system depends
on the parameters in a continuously differentiable fashion. We can see this
easily by using a special little trick. Suppose the system
X
= F
a
(X)
depends on the parameter a in a C
1
fashion. Let’s consider an “artificially”
augmented system of differential equations given by
x
1
= f
1
(x
1
, ..., x
n
, a)
.
.
.
x
n
= f
n
(x
1
, ..., x
n
, a)
a
= 0.
7.4 The Variational Equation 149
This is now an autonomous system of n +1 differential equations. While this
expansion of the system may seem trivial, we may now invoke the previous
result about continuous dependence of solutions on initial conditions to verify
that solutions of the original system depend continuously on a as well.
Theorem. (Continuous Dependence on Parameters) Let X
= F
a
(X)
be a system of differential equations for which F
a
is continuously differentiable
in both X and a. Then the flow of this system depends continuously on a as
well.
7.4 The Variational Equation
Consider an autonomous system X
= F(X ) where, as usual, F is assumed to
be C
1
. The flow φ(t , X ) of this system is a function of both t and X . From the
results of the previous section, we know that φ is continuous in the variable X .
We also know that φ is differentiable in the variable t , since t → φ(t , X ) is just
the solution curve through X. In fact, φ is also differentiable in the variable X,
for we shall prove in Chapter 17:
Theorem. (Smoothness of Flows). Consider the system X
= F(X) where
FisC
1
. Then the flow φ(t , X) of this system is a C
1
function; that is, ∂φ/∂t and
∂φ/∂X exist and are continuous in t and X.
Note that we can compute ∂φ/∂t for any value of t as long as we know the
solution passing through X
0
, for we have
∂φ
∂t
(t, X
0
) = F(φ(t , X
0
)).
We also have
∂φ
∂X
(t, X
0
) = Dφ
t
(X
0
)
where Dφ
t
is the Jacobian of the function X → φ
t
(X). To compute ∂φ/∂X,
however, it appears that we need to know the solution through X
0
as well as
the solutions through all nearby initial positions, since we need to compute
the partial derivatives of the various components of φ
t
. However, we can
get around this difficulty by introducing the variational equation along the
solution through X
0
.
To accomplish this, we need to take another brief detour into the world of
nonautonomous differential equations. Let A(t ) be a family of n ×n matrices
150 Chapter 7 Nonlinear Systems
that depends continuously on t . The system
X
= A(t )X
is a linear, nonautonomous system. We have an existence and uniqueness
theorem for these types of equations:
Theorem. Let A(t) be a continuous family of n × n matrices defined for t ∈
[α, β]. Then the initial value problem
X
= A(t )X , X (t
0
) = X
0
has a unique solution that is defined on the entire interval [α, β].
Note that there is some additional content to this theorem: We do not
assume that the right-hand side is a C
1
function in t . Continuity of A(t)
suffices to guarantee existence and uniqueness of solutions.
Example. Consider the first-order, linear, nonautonomous differential
equation
x
= a(t )x.
The unique solution of this equation satisfying x(0) = x
0
is given by
x(t ) = x
0
exp
t
0
a(s) ds
,
as is easily checked using the methods of Chapter 1. All we need is that a(t )is
continuous in order that x
(t) = a(t )x(t ); we do not need differentiability of
a(t ) for this to be true.
Note that solutions of linear, nonautonomous equations satisfy the linearity
principle. That is, if Y (t ) and Z (t ) are two solutions of such a system, then so
too is αY (t ) + βZ (t ) for any constants α and β.
Now we return to the autonomous, nonlinear system X
= F(X ). Let X(t )
be a particular solution of this system defined for t in some interval J =[α, β].
Fix t
0
∈ J and set X(t
0
) = X
0
. For each t ∈ J let
A(t ) = DF
X(t)
where DF
X(t)
denotes the Jacobian matrix of F at the point X (t ) ∈ R
n
. Since
F is C
1
, A(t ) = DF
X(t)
is a continuous family of n ×n matrices. Consider the

7.4 The Variational Equation 151
nonautonomous linear equation
U
= A(t )U .
This equation is known as the variational equation along the solution X(t ). By
the previous theorem, we know that this variational equation has a solution
defined on all of J for every initial condition U (t
0
) = U
0
.
The significance of this equation is that, if U (t ) is the solution of the
variational equation that satisfies U (t
0
) = U
0
, then the function
t → X(t) + U (t )
is a good approximation to the solution Y (t ) of the autonomous equation
with initial value Y (t
0
) = X
0
+ U
0
, provided U
0
is sufficiently small. This is
the content of the following result.
Proposition. Consider the system X
= F(X) where F is C
1
. Suppose
1. X (t) is a solution of X
= F(X ), which is defined for all t ∈[α, β] and
satisfies X (t
0
) = X
0
;
2. U (t) is the solution to the variational equation along X(t) that satisfies
U (t
0
) = U
0
;
3. Y (t ) is the solution of X
= F(X) that satisfies Y (t
0
) = X
0
+ U
0
.
Then
lim
U
0
→0
|Y (t ) − (X(t) + U (t ))|
|U
0
|
converges to 0 uniformly in t ∈[α, β].
Technically, this means that for every > 0 there exists δ > 0 such that if
|U
0
|≤δ, then
|Y (t ) − (X(t) + U (t ))|≤|U
0
|
for all t ∈[α, β]. Thus, as U
0
→ 0, the curve t → X(t ) + U (t ) is a better
and better approximation to Y (t ). In many applications, the solution of the
variational equation X(t ) + U (t) is used in place of Y (t ); this is convenient
because U (t ) depends linearly on U
0
by the linearity principle.
Example. Consider the nonlinear system of equations
x
= x + y
2
y
=−y.
We will discuss this system in more detail in the next chapter. For now, note
that we know one solution of this system explicitly, namely, the equilibrium

152 Chapter 7 Nonlinear Systems
solution at the origin X (t ) ≡ (0, 0). The variational equation along this
solution is given by
U
= DF
0
(U ) =
10
0 −1
U ,
which is an autonomous linear system. We obtain the solutions of this equation
immediately: They are given by
U (t ) =
x
0
e
t
y
0
e
−t
.
The result above then guarantees that the solution of the nonlinear equation
through (x
0
, y
0
) and defined on the interval [−τ , τ ] is as close as we wish to
U (t ), provided (x
0
, y
0
) is sufficiently close to the origin.
Note that the arguments in this example are perfectly general. Given any
nonlinear system of differential equations X
= F(X) with an equilibrium
point at X
0
, we may consider the variational equation along this solution. But
DF
X
0
is a constant matrix A. The variational equation is then U
= AU , which
is an autonomous linear system. This system is called the linearized system at
X
0
. We know that flow of the linearized system is exp(tA)U
0
, so the result
above says that near an equilibrium point of a nonlinear system, the phase
portrait resembles that of the corresponding linearized system. We will make
the term resembles more precise in the next chapter.
Using the previous proposition, we may now compute ∂φ/∂X, assuming we
know the solution X (t ):
Theorem. Let X
= F(X ) be a system of differential equations where F is C
1
.
Let X (t ) be a solution of this system satisfying the initial condition X(0) = X
0
and defined for t ∈[α, β], and let U (t , U
0
) be the solution to the variational
equation along X (t ) that satisfies U (0, U
0
) = U
0
. Then
Dφ
t
(X
0
) U
0
= U (t, U
0
).
That is, ∂φ/∂X applied to U
0
is given by solving the corresponding variational
equation starting at U
0
.
Proof: Using the proposition, we have for all t ∈[α, β]:
Dφ
t
(X
0
)U
0
= lim
h→0
φ
t
(X
0
+ hU
0
) − φ
t
(X
0
)
h
= lim
h→0
U (t , hU
0
)
h
= U (t, U
0
).
7.5 Exploration: Numerical Methods 153
Example. As an illustration of these ideas, consider the differential equation
x
= x
2
. An easy integration shows that the solution x(t ) satisfying the initial
condition x(0) = x
0
is
x(t ) =
−x
0
x
0
t − 1
.
Hence we have
∂φ
∂x
(t, x
0
) =
1
(x
0
t − 1)
2
.
On the other hand, the variational equation for x(t )is
u
= 2x(t ) u =
−2x
0
x
0
t − 1
u.
The solution of this equation satisfying the initial condition u(0) = u
0
is
given by
u(t ) = u
0
1
x
0
t − 1
2
as required.
7.5 Exploration: Numerical Methods
In this exploration, we first describe three different methods for approximating
the solutions of first-order differential equations. Your task will be to evaluate
the effectiveness of each method.
Each of these methods involves an iterative process whereby we find a
sequence of points (t
k
, x
k
) that approximates selected points (t
k
, x(t
k
)) along
the graph of a solution of the first-order differential equation x
= f (t , x). In
each case we will begin with an initial value x(0) = x
0
.Sot
0
= 0 and x
0
is our
given initial value. We need to produce t
k
and x
k
.
In each of the three methods we will generate the t
k
recursively by choosing
a step size t and simply incrementing t
k
at each stage by t . Hence
t
k+1
= t
k
+ t
in each case. Choosing t small will (hopefully) improve the accuracy of the
method.
Therefore, to describe each method, we only need to determine the values
of x
k
. In each case, x
k+1
will be the x-coordinate of the point that sits directly

154 Chapter 7 Nonlinear Systems
over t
k+1
on a certain straight line through (t
k
, x
k
)inthetx–plane. Thus all we
need to do is to provide you with the slope of this straight line and then x
k+1
is determined. Each of the three methods involves a different straight line.
1. Euler’s method. Here x
k+1
is generated by moving t time units along
the straight line generated by the slope field at the point (t
k
, x
k
). Since the
slope at this point is f (t
k
, x
k
), taking this short step puts us at
x
k+1
= x
k
+ f (t
k
, x
k
) t .
2. Improved Euler’s method. In this method, we use the average of two slopes
to move from (t
k
, x
k
)to(t
k+1
, x
k+1
). The first slope is just that of the
slope field at (t
k
, x
k
), namely,
m
k
= f (t
k
, x
k
).
The second is the slope of the slope field at the point (t
k+1
, y
k
), where
y
k
is the terminal point determined by Euler’s method applied at (t
k
, x
k
).
That is,
n
k
= f (t
k+1
, y
k
) where y
k
= x
k
+ f (t
k
, x
k
) t .
Then we have
x
k+1
= x
k
+
m
k
+ n
k
2
t.
3. (Fourth-order) Runge-Kutta method. This method is the one most often
used to solve differential equations. There are more sophisticated numer-
ical methods that are specifically designed for special situations, but this
method has served as a general-purpose solver for decades. In this method,
we will determine four slopes, m
k
, n
k
, p
k
, and q
k
. The step from (t
k
, x
k
)
to (t
k+1
, x
k+1
) will be given by moving along a straight line whose slope
is a weighted average of these four values:
x
k+1
= x
k
+
m
k
+ 2n
k
+ 2p
k
+ q
k
6
t.
These slopes are determined as follows:
(a) m
k
is given as in Euler’s method:
m
k
= f (t
k
, x
k
).

7.5 Exploration: Numerical Methods 155
(b) n
k
is the slope at the point obtained by moving halfway along the
slope field line at (t
k
, x
k
) to the intermediate point (t
k
+(t )/2, y
k
),
so that
n
k
= f (t
k
+
t
2
, y
k
) where y
k
= x
k
+ m
k
t
2
.
(c) p
k
is the slope at the point obtained by moving halfway along a
different straight line at (t
k
, x
k
), where the slope is now n
k
rather
than m
k
as before. Hence
p
k
= f (t
k
+
t
2
, z
k
) where z
k
= x
k
+ n
k
t
2
.
(d) Finally, q
k
is the slope at the point (t
k+1
, w
k
) where we use a line with
slope p
k
at (t
k
, x
k
) to determine this point. Hence
q
k
= f (t
k+1
, w
k
) where w
k
= x
k
+ p
k
t.
Your goal in this exploration is to compare the effectiveness of these three
methods by evaluating the errors made in carrying out this procedure in sev-
eral examples. We suggest that you use a spreadsheet to make these lengthy
calculations.
1. First, just to make sure you comprehend the rather terse descriptions of
the three methods above, draw a picture in the tx–plane that illustrates
the process of moving from (t
k
, x
k
)to(t
k+1
, x
k+1
) in each of the three
cases.
2. Now let’s investigate how the various methods work when applied to an
especially simple differential equation, x
= x.
(a) First find the explicit solution x(t ) of this equation satisfying the
initial condition x(0) = 1 (now there’s a free gift from the math
department...).
(b) Now use Euler’s method to approximate the value of x(1) = e using
the step size t = 0. 1. That is, recursively determine t
k
and x
k
for
k = 1, ..., 10 using t = 0. 1 and starting with t
0
= 0 and x
0
= 1.
(c) Repeat the previous step with t half the size, namely, 0. 05.
(d) Again use Euler’s method, this time reducing the step size by a factor
of 5, so that t = 0. 01, to approximate x(1).
(e) Now repeat the previous three steps using the improved Euler’s
method with the same step sizes.
(f) And now repeat using Runge-Kutta.
(g) You now have nine different approximations for the value of x(1) =
e, three for each method. Now calculate the error in each case. For the