Hirsch M., Smale S., Devaney R., Differential Equations, Dynamical Systems, and an Introduction to Chaos
Подождите немного. Документ загружается.

136 Chapter 6 Higher Dimensional Linear Systems
2. Consider the linear system
X
=
⎛
⎝
λ
1
00
0 λ
2
0
00λ
3
⎞
⎠
X
where λ
3
< λ
2
< λ
1
< 0. Describe how the solution through an arbitrary
initial value tends to the origin.
3. Give an example of a 3 × 3 matrix A for which all nonequilibrium
solutions of X
= AX are periodic with period 2π. Sketch the phase
portrait.
4. Find the general solution of
X
=
⎛
⎜
⎜
⎝
0110
−1001
0001
00−10
⎞
⎟
⎟
⎠
X.
5. Consider the system
X
=
⎛
⎝
00a
0 b 0
a 00
⎞
⎠
X
depending on the two parameters a and b.
(a) Find the general solution of this system.
(b) Sketch the region in the ab–plane where this system has different
types of phase portraits.
6. Consider the system
X
=
⎛
⎝
a 0 b
0 b 0
−b 0 a
⎞
⎠
X
depending on the two parameters a and b.
(a) Find the general solution of this system.
(b) Sketch the region in the ab–plane where this system has different
types of phase portraits.
7. Coupled Harmonic Oscillators. In this series of exercises you are asked
to generalize the material on harmonic oscillators in Section 6.2 to the
case where the oscillators are coupled. Suppose there are two masses m
1

Exercises 137
k
1
k
2
k
1
m
1
m
2
Figure 6.10 A coupled oscillator.
and m
2
attached to springs and walls as shown in Figure 6.10. The springs
connecting m
j
to the walls both have spring constants k
1
, while the spring
connecting m
1
and m
2
has spring constant k
2
. This coupling means that
the motion of either mass affects the behavior of the other.
Let x
j
denote the displacement of each mass from its rest position, and
assume that both masses are equal to 1. The differential equations for
these coupled oscillators are then given by
x
1
=−(k
1
+ k
2
)x
1
+ k
2
x
2
x
2
= k
2
x
1
− (k
1
+ k
2
)x
2
.
These equations are derived as follows. If m
1
is moved to the right
(x
1
> 0), the left spring is stretched and exerts a restorative force on
m
1
given by −k
1
x
1
. Meanwhile, the central spring is compressed, so it
exerts a restorative force on m
1
given by −k
2
x
1
. If the right spring is
stretched, then the central spring is compressed and exerts a restorative
force on m
1
given by k
2
x
2
(since x
2
< 0). The forces on m
2
are similar.
(a) Write these equations as a first-order linear system.
(b) Determine the eigenvalues and eigenvectors of the corresponding
matrix.
(c) Find the general solution.
(d) Let ω
1
=
√
k
1
and ω
2
=
√
k
1
+ 2k
2
. What can be said about the
periodicity of solutions relative to the ω
j
? Prove this.
8. Suppose X
= AX where A isa4×4 matrix whose eigenvalues are ±i
√
2
and ±i
√
3. Describe this flow.
9. Suppose X
= AX where A isa4× 4 matrix whose eigenvalues are ±i
and −1 ± i. Describe this flow.
10. Suppose X
= AX where A isa4× 4 matrix whose eigenvalues are ±i
and ±1. Describe this flow.
11. Consider the system X
= AX where X = (x
1
, ..., x
6
) and
A =
⎛
⎜
⎜
⎜
⎜
⎜
⎜
⎝
0 ω
1
−ω
1
0
0 ω
2
−ω
2
0
−1
1
⎞
⎟
⎟
⎟
⎟
⎟
⎟
⎠
138 Chapter 6 Higher Dimensional Linear Systems
and ω
1
/ω
2
is irrational. Describe qualitatively how a solution behaves
when, at time 0, each x
j
is nonzero with the exception that
(a) x
6
= 0;
(b) x
5
= 0;
(c) x
3
= x
4
= x
5
= 0;
(d) x
3
= x
4
= x
5
= x
6
= 0.
12. Compute the exponentials of the following matrices:
(a)
5 −6
3 −4
(b)
2 −1
12
(c)
2 −1
02
(d)
01
10
(e)
⎛
⎝
012
003
000
⎞
⎠
(f )
⎛
⎝
200
030
013
⎞
⎠
(g)
⎛
⎝
λ 00
1 λ 0
01λ
⎞
⎠
(h)
i 0
0 −i
(i)
1 + i 0
21+ i
(j)
⎛
⎜
⎜
⎝
1000
1000
1000
1000
⎞
⎟
⎟
⎠
13. Find an example of two matrices A, B such that
exp(A + B) = exp(
A) exp(B).
14. Show that if AB = BA, then
(a) exp(A) exp(B) = exp(B) exp(A)
(b) exp(A)B = B exp(A).
15. Consider the triplet of harmonic oscillators
x
1
=−x
1
x
2
=−2x
2
x
3
=−ω
2
x
3
where ω is irrational. What can you say about the qualitative behavior of
solutions of this six-dimensional system?
7
Nonlinear Systems
In this chapter we begin the study of nonlinear differential equations. Unlike
linear (constant coefficient) systems, where we can always find the explicit
solution of any initial value problem, this is rarely the case for nonlinear sys-
tems. In fact, basic properties such as the existence and uniqueness of solutions,
which was so obvious in the linear case, no longer hold for nonlinear systems.
As we shall see, some nonlinear systems have no solutions whatsoever to a
given initial value problem. On the other hand, some systems have infinitely
many different such solutions. Even if we do find a solution of such a sys-
tem, this solution need not be defined for all time; for example, the solution
may tend to ∞ in finite time. And other questions arise: For example, what
happens if we vary the initial condition of a system ever so slightly? Does the
corresponding solution vary continuously? All of this is clear for linear sys-
tems, but not at all clear in the nonlinear case. This means that the underlying
theory behind nonlinear systems of differential equations is quite a bit more
complicated than that for linear systems.
In practice, most nonlinear systems that arise are “nice” in the sense that we
do have existence and uniqueness of solutions as well as continuity of solutions
when initial conditions are varied, and other “natural” properties. Thus we
have a choice: Given a nonlinear system, we could simply plunge ahead and
either hope that or, if possible, verify that, in each specific case, the system’s
solutions behave nicely. Alternatively, we could take a long pause at this stage
to develop the necessary hypotheses that guarantee that solutions of a given
nonlinear system behave nicely.
139

140 Chapter 7 Nonlinear Systems
In this book we pursue a compromise route. In this chapter, we will spell
out in precise detail many of the theoretical results that govern the behavior
of solutions of differential equations. We will present examples of how and
when these results fail, but we will not prove these theorems here. Rather,
we will postpone all of the technicalities until Chapter 17, primarily because
understanding this material demands a firm and extensive background in the
principles of real analysis. In subsequent chapters, we will make use of the
results stated here, but readers who are primarily interested in applications of
differential equations or in understanding how specific nonlinear systems may
be analyzed need not get bogged down in these details here. Readers who want
the technical details may take a detour to Chapter 17 now.
7.1 Dynamical Systems
As mentioned previously, most nonlinear systems of differential equations are
impossible to solve analytically. One reason for this is the unfortunate fact
that we simply do not have enough functions with specific names that we
can use to write down explicit solutions of these systems. Equally problem-
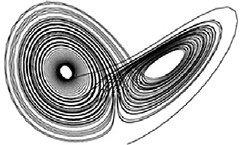
atic is the fact that, as we shall see, higher dimensional systems may exhibit
chaotic behavior, a property that makes knowing a particular explicit solution
essentially worthless in the larger scheme of understanding the behavior of the
system. Hence we are forced to resort to different means in order to understand
these systems. These are the techniques that arise in the field of dynamical
systems. We will use a combination of analytic, geometric, and topological
techniques to derive rigorous results about the behavior of solutions of these
equations.
We begin by collecting some of the terminology regarding dynamical sys-
tems that we have introduced at various points in the preceding chapters. A
dynamical system is a way of describing the passage in time of all points of a
given space
S. The space S could be thought of, for example, as the space of
states of some physical system. Mathematically,
S might be a Euclidean space
or an open subset of Euclidean space or some other space such as a surface in
R
3
. When we consider dynamical systems that arise in mechanics, the space S
will be the set of possible positions and velocities of the system. For the sake of
simplicity, we will assume throughout that the space
S is Euclidean space R
n
,
although in certain cases the important dynamical behavior will be confined
to a particular subset of
R
n
.
Given an initial position X ∈
R
n
, a dynamical system on R
n
tells us where
X is located 1 unit of time later, 2 units of time later, and so on. We denote
these new positions of X by X
1
, X
2
, and so forth. At time zero, X is located
at position X
0
. One unit before time zero, X was at X
−1
. In general, the
7.1 Dynamical Systems 141
“trajectory” of X is given by X
t
. If we measure the positions X
t
using only
integer time values, we have an example of a discrete dynamical system, which
we shall study in Chapter 15. If time is measured continuously with t ∈
R,
we have a continuous dynamical system. If the system depends on time in
a continuously differentiable manner, we have a smooth dynamical system.
These are the three principal types of dynamical systems that arise in the
study of systems of differential equations, and they will form the backbone of
Chapters 8 through 14.
The function that takes t to X
t
yields either a sequence of points or a curve
in
R
n
that represents the life history of X as time runs from −∞ to ∞.
Different branches of dynamical systems make different assumptions about
how the function X
t
depends on t . For example, ergodic theory deals with
such functions under the assumption that they preserve a measure on
R
n
.
Topological dynamics deals with such functions under the assumption that
X
t
varies only continuously. In the case of differential equations, we will
usually assume that the function X
t
is continuously differentiable. The map
φ
t
: R
n
→ R
n
that takes X into X
t
is defined for each t and, from our
interpretation of X
t
as a state moving in time, it is reasonable to expect φ
t
to
have φ
−t
as its inverse. Also, φ
0
should be the identity function φ
0
(X) = X
and φ
t
(φ
s
(X)) = φ
t+s
(X) is also a natural condition. We formalize all of this
in the following definition:
Definition
A smooth dynamical system on
R
n
is a continuously differentiable
function φ :
R × R
n
→ R
n
where φ(t , X ) = φ
t
(X) satisfies
1. φ
0
: R
n
→ R
n
is the identity function: φ
0
(X
0
) = X
0
;
2. The composition φ
t
◦ φ
s
= φ
t+s
for each t , s ∈ R.
Recall that a function is continuously differentiable if all of its partial deriva-
tives exist and are continuous throughout its domain. It is traditional to call a
continuously differentiable function a C
1
function. If the function is k times
continuously differentiable, it is called a C
k
function. Note that the definition
above implies that the map φ
t
: R
n
→ R
n
is C
1
for each t and has a C
1
inverse
φ
−t
(take s =−t in part 2).
Example. For the first-order differential equation x
= ax, the function
φ
t
(x
0
) = x
0
exp(at) gives the solutions of this equation and also defines a
smooth dynamical system on
R.
Example. Let A be an n ×n matrix. Then the function φ
t
(X
0
) = exp(tA)X
0
defines a smooth dynamical system on R
n
. Clearly, φ
0
= exp(0) = I and, as
142 Chapter 7 Nonlinear Systems
we saw in the previous chapter, we have
φ
t+s
= exp((t + s)A) = (exp(tA))(exp(sA)) = φ
t
◦ φ
s
.
Note that these examples are intimately related to the system of differential
equations X
= AX . In general, a smooth dynamical system always yields a
vector field on
R
n
via the following rule: Given φ
t
, let
F(X ) =
d
dt
t=0
φ
t
(X).
Then φ
t
is just the time t map associated to the flow of X
= F(X).
Conversely, the differential equation X
= F(X) generates a smooth dynam-
ical system provided the time t map of the flow is well defined and continuously
differentiable for all time. Unfortunately, this is not always the case.
7.2 The Existence and Uniqueness
Theorem
We turn now to the fundamental theorem of differential equations, the
existence and uniqueness theorem. Consider the system of differential
equations
X
= F(X)
where F :
R
n
→ R
n
. Recall that a solution of this system is a function X : J →
R
n
defined on some interval J ⊂ R such that, for all t ∈ J ,
X
(t) = F(X (t )).
Geometrically, X(t ) is a curve in
R
n
whose tangent vector X
(t) exists for all
t ∈ J and equals F(X(t )). As in previous chapters, we think of this vector
as being based at X (t), so that the map F :
R
n
→ R
n
defines a vector field
on
R
n
.Aninitial condition or initial value for a solution X : J → R
n
is
a specification of the form X(t
0
) = X
0
where t
0
∈ J and X
0
∈ R
n
. For
simplicity, we usually take t
0
= 0. The main problem in differential equations
is to find the solution of any initial value problem; that is, to determine the
solution of the system that satisfies the initial condition X (0) = X
0
for each
X
0
∈ R
n
.
Unfortunately, nonlinear differential equations may have no solutions
satisfying certain initial conditions.
7.2 The Existence and Uniqueness Theorem 143
Example. Consider the simple first-order differential equation
x
=
1ifx<0
−1ifx ≥ 0.
This vector field on
R points to the left when x ≥ 0 and to the right if x<0.
Consequently, there is no solution that satisfies the initial condition x(0) = 0.
Indeed, such a solution must initially decrease since x
(0) =−1, but for all
negative values of x, solutions must increase. This cannot happen. Note further
that solutions are never defined for all time. For example, if x
0
> 0, then the
solution through x
0
is given by x(t) = x
0
− t , but this solution is only valid
for −∞ <t<x
0
for the same reason as above.
The problem in this example is that the vector field is not continuous at
0; whenever a vector field is discontinuous we face the possibility that nearby
vectors may point in “opposing” directions, thereby causing solutions to halt
at these bad points.
Beyond the problem of existence of solutions of nonlinear differential equa-
tions, we also must confront the fact that certain equations may have many
different solutions to the same initial value problem.
Example. Consider the differential equation
x
= 3x
2/3
.
The identically zero function u :
R → R given by u(t ) ≡ 0 is clearly a solution
with initial condition u(0) = 0. But u
0
(t) = t
3
is also a solution satisfying this
initial condition. Moreover, for any τ > 0, the function given by
u
τ
(t) =
0ift ≤ τ
(t − τ )
3
if t>τ
is also a solution satisfying the initial condition u
τ
(0) = 0. While the differ-
ential equation in this example is continuous at x
0
= 0, the problems arise
because 3x
2/3
is not differentiable at this point.
From these two examples it is clear that, to ensure existence and uniqueness
of solutions, certain conditions must be imposed on the function F. In the first
example, F was not continuous at the problematic point 0, while in the second
example, F failed to be differentiable at 0. It turns out that the assumption that
F is continuously differentiable is sufficient to guarantee both existence and
uniqueness of solutions, as we shall see. Fortunately, differential equations
that are not continuously differentiable rarely arise in applications, so the
144 Chapter 7 Nonlinear Systems
phenomenon of nonexistence or nonuniqueness of solutions with given initial
conditions is quite exceptional.
The following is the fundamental local theorem of ordinary differential
equations.
The Existence and Uniqueness Theorem. Consider the initial value
problem
X
= F(X), X(t
0
) = X
0
where X
0
∈ R
n
. Suppose that F : R
n
→ R
n
is C
1
. Then, first of all, there exists a
solution of this initial value problem and, secondly, this is the only such solution.
More precisely, there exists an a > 0 and a unique solution
X : (t
0
− a, t
0
+ a) → R
n
of this differential equation satisfying the initial condition X (t
0
) = X
0
.
The important proof of this theorem is contained in Chapter 17.
Without dwelling on the details here, the proof of this theorem depends
on an important technique known as Picard iteration. Before moving on, we
illustrate how the Picard iteration scheme used in the proof of the theorem
works in several special examples. The basic idea behind this iterative process
is to construct a sequence of functions that converges to the solution of the
differential equation. The sequence of functions u
r
(t) is defined inductively
by u
0
(t) = x
0
where x
0
is the given initial condition, and then
u
r+1
(t) = x
0
+
t
0
u
k
(s) ds.
Example. Consider the simple differential equation x
= x. We will pro-
duce the solution of this equation satisfying x(0) = x
0
. We know, of course,
that this solution is given by x(t ) = x
0
e
t
. We will construct a sequence of
functions u
k
(t), one for each k, which converges to the actual solution x(t )as
k →∞.
We start with
u
0
(t) = x
0
,
the given initial value. Then we set
u
1
(t) = x
0
+
t
0
u
0
(s) ds = x
0
+
t
0
x
0
ds,
7.2 The Existence and Uniqueness Theorem 145
so that u
1
(t) = x
0
+ tx
0
. Given u
1
we define
u
2
(t) = x
0
+
t
0
u
1
(s) ds = x
0
+
t
0
(x
0
+ sx
0
) ds,
so that u
2
(t) = x
0
+ tx
0
+
t
2
2
x
0
. You can probably see where this is heading.
Inductively, we set
u
k+1
(t) = x
0
+
t
0
u
k
(s) ds,
and so
u
k+1
(t) = x
0
k+1
i=0
t
i
i!
.
As k →∞, u
k
(t) converges to
x
0
∞
i=0
t
i
i!
= x
0
e
t
= x(t ),
which is the solution of our original equation.
Example. For an example of Picard iteration applied to a system of
differential equations, consider the linear system
X
= F(X) =
01
−10
X
with initial condition X (0) = (1, 0). As we have seen, the solution of this initial
value problem is
X(t ) =
cos t
−sin t
.
Using Picard iteration, we have
U
0
(t) =
1
0
U
1
(t) =
1
0
+
t
0
F
1
0
ds =
1
0
+
t
0
0
−1
ds =
1
−t
U
2
(t) =
1
0
+
t
0
−s
−1
ds =
1 − t
2
/2
−t