Hassani S. Mathematical Methods: For Students of Physics and Related Fields
Подождите немного. Документ загружается.

29.1 The Fourier Transform 701
If a charge distribution is involved, the inverse Fourier transform will be interestingly
different as the following example shows.
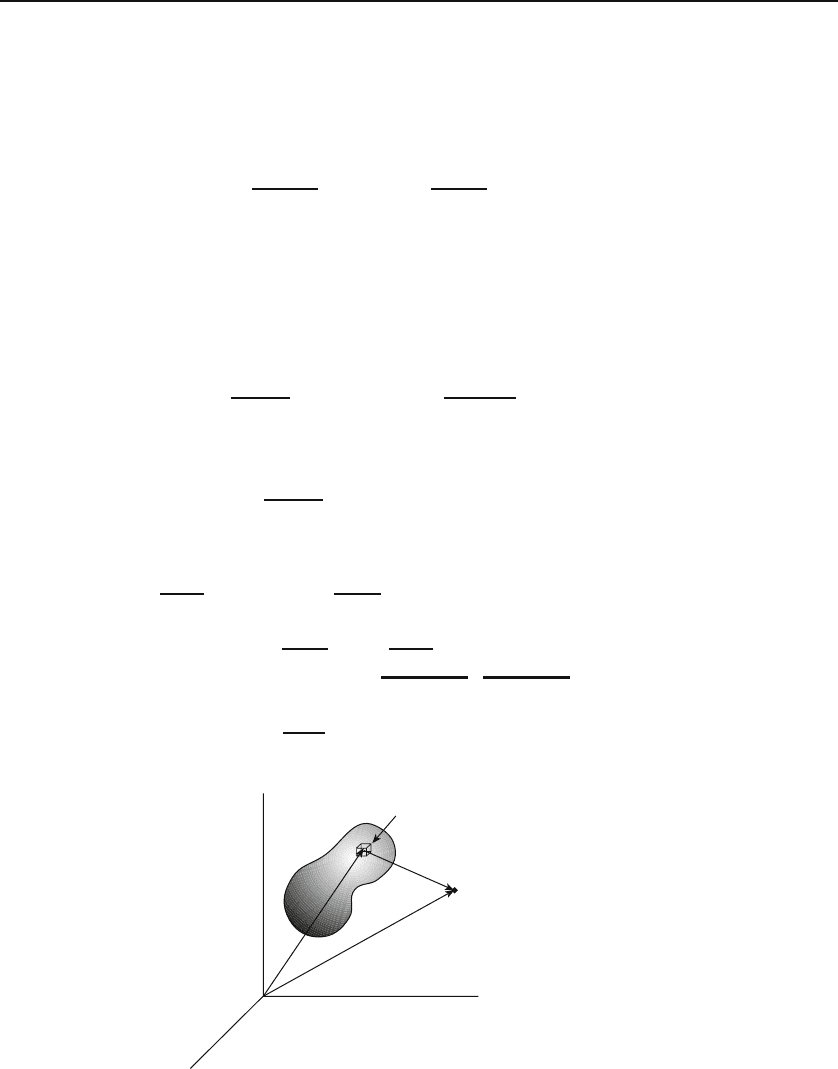
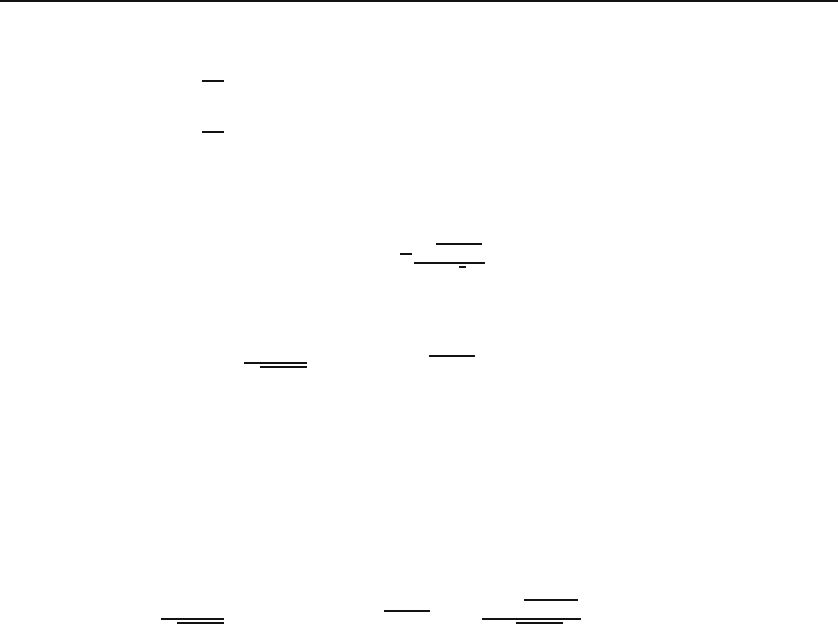
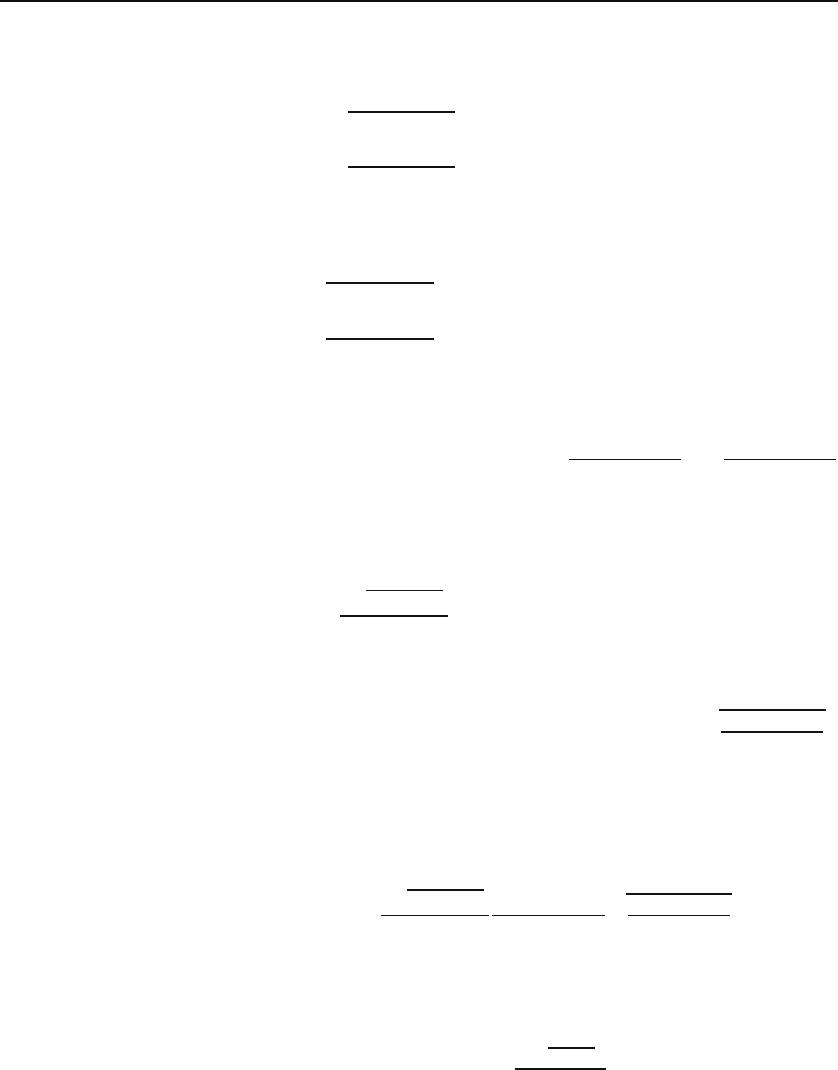
Example 29.1.4. The example above deals with the electrostatic potential of a
point charge. Let us now consider the case where the charge is distributed over a
finite volume. Then the potential is
V (r)=
###
k
e
qρ(r
)
|r
− r|
d
3
x
≡ k
e
q
#
ρ(r
)
|r
− r|
d
3
x
,
where qρ(r
) is the charge density at r
, and we have used a single integral because
d
3
x
already indicates the number of integrations to be performed. Note that we
have normalized ρ(r
) so that its integral over the volume is 1. Figure 29.5 shows
the geometry of the situation.
Making a change of variables, R ≡ r
− r,orr
= R + r,andd
3
x
= d
3
X,with
R ≡ (X, Y, Z), we get
F
−1
[V ](k) ≡
˜
V (k)=
1
(2π)
3/2
#
d
3
xe
−ik·r
k
e
q
#
ρ(R + r)
R
d
3
X. (29.13)
To evaluate Equation (29.13), we substitute for ρ(R + r) in terms of its Fourier
transform,
ρ(R + r)=
1
(2π)
3/2
#
d
3
k
˜ρ(k
)e
ik
·(R+r)
. (29.14)
Combining (29.13) and (29.14), we obtain
˜
V (k)=
k
e
q
(2π)
3
#
d
3
xd
3
Xd
3
k
e
ik
·R
R
˜ρ(k
)e
ir·(k
−k)
= k
e
q
#
d
3
Xd
3
k
e
ik
·R
R
˜ρ(k
)
1
(2π)
3
#
d
3
xe
ir·(k
−k)
δ(k
−k)by Equation (18.30)
= k
e
q ˜ρ(k)
#
d
3
X
e
ik·R
R
. (29.15)
dq
r
r
′
r
−
r
′
P
Figure 29.5: The inverse Fourier transform of the potential of a continuous charge
distribution at P is calculated using this geometry.
702 Integral Transforms
What is nice about this result is that the contribution of the charge distribution,
˜ρ(k), has been completely factored out. The integral, aside from a constant and a
change in the sign of k, is simply the inverse Fourier transform of the Coulomb
potential of a point charge obtained in the previous example. We can therefore
write Equation (29.15) as
˜
V (k)=(2π)
3/2
˜ρ(k)
˜
V
Coul
(−k)=
4πk
e
q ˜ρ(k)
|k|
2
.
This equation is important in analyzing the structure of atomic particles. The
inverse Fourier transform
˜
V (k) is directly measurable in scattering experiments.
In a typical experiment a (charged) target is probed with a charged point particle
(electron). If the analysis of the scattering data shows a deviation from 1/k
2
in the
behavior of
˜
V (k), then it can be concluded that the target particle has a charge
distribution. More specifically, a plot of k
2
˜
V (k)versusk gives the variation of
˜ρ(k), the form factor,withk. If the resulting graph is a constant, then ˜ρ(k)isaform factor
constant, and the target is a point particle [˜ρ(k) is a constant for point particles,
where ˜ρ(r
) ∝ δ(r − r
)]. If there is any deviation from a constant function, ˜ρ(k)
must have a dependence on k, and correspondingly, the target particle must have a
charge distribution.
The above discussion, when generalized to four-dimensional relativistic space-Fourier transform
and the discovery
of quarks
time, was the basis for a strong argument in favor of the existence of point-like
particles—quarks—inside a proton in 1968, when the results of the scattering of
high-energy electrons off protons at the Stanford Linear Accelerator Center revealed
deviation from a constant for the proton form factor.
29.1.4 Application to Differential Equations
The Fourier transform is very useful for solving differential equations. This is
because the derivative operator in r space turns into ordinary multiplication
in k space. For example, if we differentiate f (r) in Equation (29.10) with
respect to x
j
,weobtain
∂
∂x
j
f(r)=
1
(2π)
n/2
##
Ω
k
∞
d
n
k
∂
∂x
j
e
i(k
1
x
1
+···+k
j
x
j
+···+k
n
x
n
)
˜
f(k)
=
1
(2π)
n/2
##
Ω
k
∞
d
n
k(ik
j
)e
ik·r
˜
f(k). (29.16)
That is, every time we differentiate with respect to any component of r,the
corresponding component of k “comes down.” Thus, the n-dimensional gra-
dient and Laplacian can be written as
∇
∇
∇f(r)=(2π)
−n/2
#
d
n
k(ik)e
ik·r
˜
f(k)
∇
2
f(r)=(2π)
−n/2
#
d
n
k(−k
2
)e
ik·r
˜
f(k). (29.17)
29.1 The Fourier Transform 703
Let us illustrate the above points with a simple example. Consider the
ordinary second-order differential equation
C
2
d
2
x
dt
2
+ C
1
dx
dt
+ C
0
x = f(t), (29.18)
where C
0
,C
1
,andC
2
are constants. We can “solve” this equation by simply
substituting the following in it:
x(t)=
1
√
2π
#
∞
−∞
dω˜x(ω)e
iωt
,
dx
dt
=
1
√
2π
#
∞
−∞
dω˜x(ω)(iω)e
iωt
,
d
2
x
dt
2
= −
1
√
2π
#
∞
−∞
dω˜x(ω)ω
2
e
iωt
,f(t)=
1
√
2π
#
∞
−∞
dω
˜
f(ω)e
iωt
.
This gives
1
√
2π
#
∞
−∞
dω˜x(ω)(−C
2
ω
2
+ iC
1
ω + C
0
)e
iωt
=
1
√
2π
#
∞
−∞
dω
˜
f(ω)e
iωt
.
Equating the coefficients of e
iωt
on both sides, we obtain
˜x(ω)=
˜
f(ω)
−C
2
ω
2
+ iC
1
ω + C
0
. (29.19)
If we know
˜
f(ω) [which can be obtained from f (t)], we can calculate x(t)
by Fourier-transforming ˜x(ω). The resulting integrals are not generally easy
to evaluate. In some cases the methods of complex analysis may be helpful; in
others numerical integration may be the last resort. However, the real power
of the Fourier transform lies in the formal analysis of differential equations.
Example 29.1.5.
A harmonically driven circuit consisting of an inductor L,a
resistor R, and a capacitor C, obeys the following differential equation:
L
d
2
Q
dt
2
+ R
dQ
dt
+
Q
C
= E cos ω
0
t,
where Q is the charge on the capacitor. Except for the constants, this is identical
to (29.18). The Fourier transform of cosine is a sum of two Dirac delta functions
(see Problem 29.6). Substituting in Equation (29.19), we obtain
˜
Q(ω)=E
π
2
δ(ω − ω
0
)+δ(ω + ω
0
)
−Lω
2
+ iRω +(1/C)
.
Therefore,
Q(t)=
1
√
2π
#
∞
−∞
dω
˜
Q(ω)e
iωt
=
E
2
#
∞
−∞
dω
δ(ω − ω
0
)+δ(ω + ω
0
)
−Lω
2
+ iRω +(1/C)
e
iωt
=
E
2
e
iω
0
t
−Lω
2
0
+ iRω
0
+(1/C)
+
e
−iω
0
t
−Lω
2
0
− iRω
0
+(1/C)
.
704 Integral Transforms
Noting that the second term in the outer parentheses is the complex conjugate of
the first term, we obtain
Q(t)=
E
2
2Re
e
iω
0
t
−Lω
2
0
+ iRω
0
+(1/C)
and using Re(z
1
/z
∗
2
)=(x
1
x
2
+y
1
y
2
)/|z
2
|
2
,wherex and y are the real and imaginary
parts of a complex number z, we finally obtain
Q(t)=E
[(1/C) − Lω
2
0
]cosω
0
t + Rω
0
sin ω
0
t
[−Lω
2
0
+(1/C)]
2
+ R
2
ω
2
0
for the charge on the capacitor and
I(t)=
dQ
dt
= E
−[(1/C) − Lω
2
0
]ω
0
sin ω
0
t + Rω
2
0
cos ω
0
t
[−Lω
2
0
+(1/C)]
2
+ R
2
ω
2
0
for the current in the circuit. Note the occurrence of a resonance (large current)
at the voltage source frequency of ω
0
=1/
√
LC. Note also that the Q(t) obtained
above is a particular, not the most general, solution of the differential equation (see
Box 24.4.1).
Example 29.1.6. The one-dimensional heat equation, the PDE governing the
behavior of the temperature T (x, t)alongarod,is
∂T
∂t
= κ
2
∂
2
T
∂x
2
, (29.20)
wherewehaveusedκ [see Equation (22.3)] to leave k exclusively for Fourier trans-
forms. Write T (x, t) as a Fourier transform in the x variable
T (x, t)=
1
√
2π
#
∞
−∞
˜
T (k, t)e
ikx
dk, (29.21)
and substitute in (29.20) to obtain
1
√
2π
#
∞
−∞
∂
˜
T
∂t
e
ikx
dk =
1
√
2π
#
∞
−∞
(−κ
2
k
2
)
˜
T (k, t)e
ikx
dk or
∂
˜
T
∂t
= −κ
2
k
2
˜
T (k, t)
This is a first order ordinary differential equation which can be easily solved
˜
T (k, t)=C(k)e
−κ
2
k
2
t
, (29.22)
where C(k) is the constant of integration, which could depend on k. Now suppose
that initially the temperature distribution on the rod is T (x, 0) = f(x), where f(x)
is a given known function. Then the last equation gives
˜
T (k, 0) = C(k), and (29.21)
yields
f(x)=T (x, 0) =
1
√
2π
#
∞
−∞
˜
T (k, 0)e
ikx
dk =
1
√
2π
#
∞
−∞
C(k)e
ikx
dk,
showing that C(k) is the inverse Fourier transform of f(x):
C(k)=
1
√
2π
#
∞
−∞
f(x)e
−ikx
dx.
29.2 Fourier Transform and Green’s Functions 705
Substituting this in (29.22) and the result in (29.21) yields
T (x, t)=
1
2π
#
∞
−∞
#
∞
−∞
f(y)e
−iky
dy
e
−κ
2
k
2
t
e
ikx
dk
=
1
2π
#
∞
−∞
f(y) dy
#
∞
−∞
e
−κ
2
k
2
t+ik(x−y)
dk. (29.23)
The inner integral can be done by completing the square in the exponent as in
Example 29.1.2. The result is
#
∞
−∞
e
−κ
2
k
2
t+ik(x−y)
dk =
√
π
e
−
(x−y)
2
4κ
2
t
κ
√
t
.
Putting this in (29.23) and noting that f(y)=T (y,0), we finally obtain
T (x, t)=
1
√
4πκ
2
t
#
∞
−∞
T (y, 0)e
−
(x−y)
2
4κ
2
t
dy. (29.24)
If we know the initial shape of the temperature distribution T (y,0) on the rod,
we can calculate the temperature at every point of the rod for any time. A simple
example is if the temperature is infinitely hot at one point, say x
0
of the rod and
zero every where else. Then
T (y,0) = T
0
δ(y − x
0
),
and (29.24) yields
T (x, t)=
1
√
4πκ
2
t
#
∞
−∞
T
0
δ(y − x
0
)e
−
(x−y)
2
4κ
2
t
dy =
T
0
e
−
(x−x
0
)
2
4κ
2
t
√
4πκ
2
t
.
29.2 Fourier Transform and Green’s Functions
Suppose you are given a system of n linear equations in n unknowns and asked
to slove them. An elegant approach would be to use matrices. So, let L be
the matrix of coefficients, y the column vector of the n unknowns, and f the
column vector of the constants appearing on the right-hand side of the system
of equations. The matrix equation and the corresponding system of equations
would look like the following:
Ly = f,
n
j=1
L
ij
y
j
= f
i
,i=1, 2,...,n. (29.25)
If L has an inverse G, i.e., if there is a matrix G such that LG = 1,then
the solution to the above equation can formally be written as y = Gf,orin
component form as
y
i
=
n
j=1
G
ij
f
j
,i=1, 2,...,n. (29.26)

706 Integral Transforms
Thus, the problem of solving the system of linear equations turns into the
problem of finding the inverse of the coefficient matrix; and this is independent
of what f is!OnceIknowtheinverseofL,Icansolveany system of linear
equations, regardless of the constants on the right-hand side. Recalling that
the elements of the unit matrix are just the correctly labeled Kronecker delta,
the equation that G has to satisfy becomes
LG = 1,
n
j=1
L
ij
G
jk
= δ
ik
,i,k=1, 2,...,n. (29.27)
Now think of a column vector v as a “machine:” feed the machine an
From discrete
matrices to
continuous
differential
operators
integer between 1 and n, and it will give you a real number, i.e., the element
of the column vector carrying the integer as an index. Similarly, think of a
matrix M as another “machine” which gives you a real number if you feed it
a pair of integers between 1 and n. Write this as
v(i)=v
i
, and M(i, j)=M
ij
,i,j=1, 2,...,n. (29.28)
Would it be beneficial to generalize the action of the machine to include
all real numbers? A vector machine that feeds on real numbers is a function:
feed a function a real number and it will spit out a real number. Replacing
i with x,wehavev(x)=v
x
≡ v(x), because v
x
is not a common notation.
Similarly, M(x, x
)=M
xx
≡ M (x, x
). Furthermore, all summations have
to be replaced by integrals. For example, the system of equations (29.25)
becomes
Ly = f
#
b
a
L(x, x
)y(x
) dx
= f(x),
where (a, b) is a convenient interval of the real line usually taken to be
(−∞, ∞). What is the meaning of L(x, x
)? It can be merely a function
of two variables. But more interestingly, it can be a differential operator.
However, a differential operator is a local operator, i.e., it is a linear combi-
nation of derivatives of various orders at a single point,sayx. This requires
the last integral above to collapse to x. The only way that can happen is if
L(x, x
)=δ(x − x
)L(x) ≡ δ(x −x
)L
x
, (29.29)
where L
x
is by definition a differential operator in the variable x.
Now that we have a differential operator which is the generalization of a
matrix, how do we find its inverse? In other words, how do we generalize
Equation (29.27)? We suspect that the Kronecker delta turns into a Dirac
delta function. With this suspicion, we generalize (29.27) to
LG = 1,
#
b
a
L(x, x
)G(x
,x
0
)=δ(x −x
0
).
Substituting (29.29) in the second equation yields
Differential
equation for
Green’s function
#
b
a
δ(x −x
)L
x
G(x
,x
0
)=δ(x − x
0
),
29.2 Fourier Transform and Green’s Functions 707
or
L
x
G(x, x
0
)=δ(x −x
0
). (29.30)
A function which satisfies this equation is called the Green’s function for
the differential operator L
x
. If we can find the Green’s function for L
x
,then
the solution to the differential equation L
x
y(x)=f(x) can be written as the
generalization of (29.26):
y(x)=
#
b
a
G(x, x
)f(x
) dx
. (29.31)
To show this, note that
L
x
y(x)=L
x
#
b
a
G(x, x
)f(x
) dx
=
#
b
a
L
x
G(x, x
)f(x
) dx
=
#
b
a
δ(x −x
)f(x
) dx
= f(x).
Green’s functions are powerful tools for solving differential equations. Or-
dinary differential equations have ordinary derivatives and the differential
operator involves a single variable. Partial differential equations correspond
to differential operators involving several variables. If x denotes the collec-
tion of all these variables, then the differential operator can be denoted by L
x
and the Green’s function by G(x, x
), which satisfies the partial differential
equation
L
x
G(x, x
)=δ(x −x
). (29.32)
Since Fourier transform turns differentiation into multiplication, and the
Dirac delta function has a very simple inverse Fourier transform, Green’s
function are very elegantly calculated via Fourier transform techniques. For
example, if L
x
is a second order partial differential operator with constant
coefficients in n variables, then Fourier transforming only the x variables and
writing
G(x, x
)=
1
(2π)
n/2
#
d
n
k
˜
G(k, x
)e
ik·x
,
δ(x −x
)=
1
(2π)
n
#
d
n
ke
ik·(x−x
)
, (29.33)
the differential equation (29.32) becomes
#
d
n
k
˜
G(k, x
)L
x
e
ik·x
=
1
(2π)
n/2
#
d
n
ke
ik·(x−x
)
=
1
(2π)
n/2
#
d
n
ke
ik·x
e
−ik·x
.
When L
x
acts on the exponential, it produces a polynomial p(k
j
) of second Green’s function
in n dimensions
degree in components k
j
of k. Therefore, equating the coefficient of e
ik·x
on
both sides, we obtain
˜
G(k, x
)p(k
j
)=
1
(2π)
n/2
e
−ik·x
or
˜
G(k, x
)=
1
(2π)
n/2
e
−ik·x
p(k
j
)
.
708 Integral Transforms
Substituting this in the first equation of (29.33), we get
G(x, x
)=
1
(2π)
n
#
d
n
k
e
ik·(x−x
)
p(k
j
)
,
which shows that the Green’s function is a function of the difference between
its arguments. We therefore have
G(x − x
)=
1
(2π)
n
#
d
n
k
e
ik·(x−x
)
p(k
j
)
. (29.34)
29.2.1 Green’s Function for the Laplacian
Equation (29.17) tells us that p(k
j
)=−k
2
for the Laplacian. Thus, with
n = 3, (29.34) becomes
G(r −r
)=−
1
(2π)
3
#
d
3
k
e
ik·(r−r
)
k
2
. (29.35)
To evaluate this integral, use spherical coordinates in the k-space, and choose
the polar axis to be along the vector r − r
. Then, d
3
k = k
2
sin θdkdθdϕ and
(29.35) becomes
G(r −r
)=−
1
(2π)
3
#
∞
0
k
2
dk
#
π
0
sin θdθ
#
2π
0
dϕ
e
ik|r−r
|cos θ
k
2
.
The ϕ integration gives 2π.Fortheθ integration, let u =cosθ. Then the
integral becomes
G(r − r
)=
1
(2π)
2
#
∞
0
dk
#
−1
1
due
ik|r−r
|u
=
1
(2π)
2
#
∞
0
dk
e
ik|r−r
|u
ik|r − r
|
−1
1
=
1
(2π)
2
|r − r
|
#
∞
0
dk
e
−ik|r−r
|
− e
ik|r−r
|
ik
= −
2
(2π)
2
|r − r
|
#
∞
0
dk
sin (k|r −r
|)
k
.
Example 21.3.3 calculated the last integral and yielded π/2forit. Wethus
obtain the important result that for the Laplacian, the Green’s function is
G(r − r
)=−
1
4π|r − r
|
. (29.36)
From this and ∇
2
G(r − r
)=δ(r − r
), we obtain another important result:
∇
2
1
|r − r
|
= −4πδ(r −r
). (29.37)
29.2 Fourier Transform and Green’s Functions 709
With the Green’s function of the Laplacian at our disposal, we can solve
the Poisson equation ∇
2
Φ(r)=−4πk
e
ρ(r) in electrostatics, using the three-
dimensional version of Equation (29.31):
Green’s function
solves Poisson
equation
Φ(r)=−4πk
e
#
d
3
x
G(r − r
)ρ(r
)=k
e
#
d
3
x
ρ(r
)
|r − r
|
,
which is the electrostatic potential of a charge distribution described by the
volume charge density ρ(r).
29.2.2 Green’s Function for the Heat Equation
The heat equation was given in (22.3), which, due to the special significance
attached to the letter k in this chapter, we write as
∂T
∂t
= κ
2
∇
2
T (r), or
∂T
∂t
− κ
2
∇
2
T (r)=0. (29.38)
This is a PDE in four variables. We let t be the “zeroth” coordinate, and r
the remaining three. Similarly, the 4-dimensional k space consists of k
0
and
k. The polynomial p(k
j
) of Equation (29.34) is
p(k
j
)=ik
0
+ κ
2
k
2
1
+ k
2
2
+ k
2
3
!
≡ ik
0
+ κ
2
k
2
.
Hence, with n = 4, (29.34) gives
G(x − x
)=
1
(2π)
4
#
d
4
k
e
ik
0
(x
0
−x
0
)+ik·(r−r
)
ik
0
+ κ
2
k
2
=
1
(2π)
4
#
d
3
ke
ik·(r−r
)
#
∞
−∞
dk
0
e
ik
0
(x
0
−x
0
)
ik
0
+ κ
2
k
2
. (29.39)
Let’s do the k
0
integration first. Multiply the numerator and denominator by
−i to change the denominator to k
0
−iκ
2
k
2
; then use the calculus of residues
and choose the contour in the UHP (assuming that x
0
− x
0
> 0). The only
pole of the integrand is at k
0
= iκ
2
k
2
.Thus,
#
∞
−∞
dk
0
e
ik
0
(x
0
−x
0
)
ik
0
+ κ
2
k
2
= −i
#
∞
−∞
dk
0
e
ik
0
(x
0
−x
0
)
k
0
− iκ
2
k
2
= −i
2πie
−κ
2
k
2
(x
0
−x
0
)
.
Substituting this in (29.39) and using spherical coordinates in the 3-dimensional
k-space with the polar axis along r −r
yields
G(x − x
)=
1
(2π)
3
#
d
3
ke
ik·(r−r
)
e
−κ
2
k
2
(x
0
−x
0
)
=
1
(2π)
3
#
∞
0
k
2
e
−κ
2
k
2
(x
0
−x
0
)
dk
#
π
0
sin θdθ
#
2π
0
dϕe
ik|r−r
|cos θ
.
The ϕ integration yields 2π, and as in the Laplacian case, the θ integration
gives 2 sin(k|r − r
|)/(k|r − r
|); and since the resulting integrand of the k
710 Integral Transforms
integral is even, we can extend the lower limit of integration to −∞ and
introducing a factor of half. Thus, the equation above becomes
G(x −x
)=
2
(2π)
2
|r − r
|
#
∞
0
ke
−κ
2
k
2
(x
0
−x
0
)
sin(k|r − r
|)dk
=
1
(2π)
2
|r − r
|
#
∞
−∞
ke
−κ
2
k
2
(x
0
−x
0
)
sin(k|r − r
|)dk,
or, since sine is the imaginary part of complex exponential,
G(x −x
)=
1
(2π)
2
|r − r
|
Im
#
∞
−∞
ke
−κ
2
k
2
(x
0
−x
0
)
e
ik|r−r
|
dk
=
1
(2π)
2
|r − r
|
Im
#
∞
−∞
ke
−κ
2
k
2
(x
0
−x
0
)+ik|r−r
|
dk. (29.40)
Completing the square in the exponent, we have
−κ
2
k
2
(x
0
−x
0
)+ik|r−r
| = −κ
2
(x
0
−x
0
)
k −
i|r − r
|
2κ
2
(x
0
− x
0
)
2
−
|r − r
|
2
4κ
2
(x
0
− x
0
)
.
Call the imaginary number in the large parentheses iα and substitute the
result in (29.40) to obtain
G(x − x
)=
e
−
|r−r
|
2
4κ
2
(x
0
−x
0
)
(2π)
2
|r − r
|
Im
#
∞
−∞
ke
−κ
2
(x
0
−x
0
)(k−iα)
2
dk. (29.41)
Change the variable of integration to u = k − iα. Then the integral becomes
#
∞
−∞
(u + iα)e
−κ
2
(x
0
−x
0
)u
2
du = iα
#
∞
−∞
e
−κ
2
(x
0
−x
0
)u
2
du = iα
π
κ
2
(x
0
− x
0
)
.
The integral involving the u of (u+ iα) vanishes because the integrand is odd.
The Gaussian integral was evaluated in Example 3.3.1. Substituting this and
the value of α in (29.41), we obtain
G(x − x
)=
e
−
|r−r
|
2
4κ
2
(x
0
−x
0
)
(2π)
2
|r − r
|
|r − r
|
2κ
2
(x
0
− x
0
)
π
κ
2
(x
0
− x
0
)
,
or, recalling that x
0
= t and assuming that x
0
= t
= 0, yields the final form
of the Green’s function for the heat equation:
Green’s function
for heat equation
G(r − r
; t)=
e
−
|r−r
|
2
4κ
2
t
(4πκ
2
t)
3/2
. (29.42)