Haddad W.M. Nonlinear Dynamical Systems and Control: A Lyapunov-Based Approach
Подождите немного. Документ загружается.

NonlinearBook10pt November 20, 2007
DISSIPATIVITY THEORY FOR NONLINEAR SYSTEMS 375
F ∈ [M
1
, M
2
], is asymp totically stable, then the zero solution x(t) ≡ 0 to
(5.195)–(5.197) is globally asymptotically stable for all σ : R → R such that
M
1
≤ σ
′
(y) ≤ M
2
.
Note that since σ : R → R in Kalman’s conjecture is such that
M
1
≤ σ
′
(y) ≤ M
2
, it follows from the mean value th eorem that σ(·) ∈
Φ. T he converse, of course, is not necessarily true. Hence, Kalman’s
conjecture considers a refined class of feedback nonlinearities as compared
to Aizerman’s conjecture. Nevertheless, Kalman’s conjecture is also false.
However, it is important to note that if the zero solution x(t) ≡ 0 to (5.195)–
(5.197) with σ(y) = F y, where F ∈ [M
1
, M
2
], is asymptotically stable, then
the zero solution x(t) ≡ 0 to (5.195)–(5.197) is locally asymptotically stable
for all σ : R → R such that M
1
≤ σ
′
(y) ≤ M
2
. This follows as a direct
consequence of Lyapunov’s indirect method.
5.8 The Positivity Theorem and the Circle Criterion
In this section, we present sufficient conditions for an absolute stability
problem involving a dynamical system with memoryless, time-varyin g
feedback nonlinearities. In the case where m = l = 1, these sufficient
conditions involve inclusion/exclusion of the Nyquist plot of (5.195) and
(5.197) in/from a disk region that encomp asses the critical point, and
hence, ensures stability. Appropriately, this result is known as the circle
criterion or circle theorem. First, we present the simplest version of the circle
criterion known as the positivity theorem involving a half-plane exclusion
of the Nyqu ist plot of (5.195) and (5.196). For this result we assume that
σ(·, ·) ∈ Φ
pr
, where
Φ
pr
△
= {σ : R
l
× R
+
→ R
m
: σ(0, ·) = 0, σ
T
(y, t)[σ(y, t) − M y] ≤ 0, y ∈ R
l
,
a.e. t ≥ 0, and σ(y, ·) is Lebesgue measurable for all y ∈ R
l
},
(5.200)
where M ∈ R
m×l
.
Theorem 5.18 (Positivity Theorem). Consider the nonlinear dynam-
ical system (5.195)–(5.197). Suppose
G(s) ∼
A B
C D
is minimal and I
m
+ MG(s) is strictly positive real. Then the zero solution
x(t) ≡ 0 of the negative feedback interconnection of (5.195)–(5.197) is
globally exponentially stable for all σ(·, ·) ∈ Φ
pr
.
NonlinearBook10pt November 20, 2007
376 CHAPTER 5
Proof. First note that the negative feedback interconnection of
(5.195)–(5.197) has the state space representation
˙x(t) = Ax(t) − Bσ(y(t), t), x(0) = x
0
, t ≥ 0, (5.201)
y(t) = Cx(t) − Dσ(y(t), t). (5.202)
Now, it follows from Theorem 5.14 that since I
m
+MG(s) is str ictly positive
real and minimal, there exist matrices P ∈ R
n×n
, L ∈ R
p×n
, and W ∈ R
p×m
,
with P positive definite, and a scalar ε > 0 such that
0 = A
T
P + P A + εP + L
T
L, (5.203)
0 = B
T
P − MC + W
T
L, (5.204)
0 = (I + MD) + (I + MD)
T
− W
T
W. (5.205)
Next, consider the Lyapunov fu nction candidate V (x) = x
T
P x, where
P satisfies (5.203)–(5.205). The corresponding Lyapunov derivative is given
by
˙
V (x) = V
′
(x)[Ax − Bσ(y, t)]
= 2x
T
P [Ax −Bσ(y, t)]
= x
T
(A
T
P + P A)x − 2σ
T
(y, t)B
T
P x
= −x
T
(εP + L
T
L)x − σ
T
(y, t)B
T
P x − x
T
P Bσ(y, t). (5.206)
Now, adding and subtracting 2σ
T
(y, t)(I
m
+ M D)σ(y, t) and 2σ
T
(y, t)MCx
to and from (5.206) yields
˙
V (x) = −εx
T
P x − x
T
L
T
Lx − σ
T
(y, t)(B
T
P − MC)x − x
T
(B
T
P − MC)
T
·σ(y, t) − σ
T
(y, t)[(I
m
+ M D) + (I
m
+ M D)
T
]σ(y, t) + 2σ
T
(y, t)
·[σ(y, t) − M(Cx −Dσ(y, t))], (5.207)
or, equivalently,
˙
V (x) = −εx
T
P x − [Lx − W σ(y, t)]
T
[Lx − W σ(y, t)]
+2σ
T
(y, t)[σ(y, t) − M y]. (5.208)
Since σ
T
(y, t)[σ(y, t) − M y] ≤ 0 for all t ≥ 0 and σ(·, ·) ∈ Φ
pr
, it
follows that
˙
V (x) ≤ −εV (x), x ∈ R
n
, which shows that the zero solution
x(t) ≡ 0 of the negative f eedback interconnection of (5.195)–(5.197) is
globally exponentially stable for all σ(·, ·) ∈ Φ
pr
.
In the single-input, single-output case, the frequency domain condition
in Theorem 5.18 has an interesting geometric interpr etation in the Nyquist
plane. Specifically, setting G(ω) = x + y and requiring that 1 + MG(s) be
strictly positive real if follows that
x = Re G(ω) > −
1
M
, ω ∈ R, (5.209)
NonlinearBook10pt November 20, 2007
DISSIPATIVITY THEORY FOR NONLINEAR SYSTEMS 377
which is equivalent to the graphical condition that the Nyquist p lot of G(ω)
lies to the right of the vertical line defined by Re[s] = −1/M.
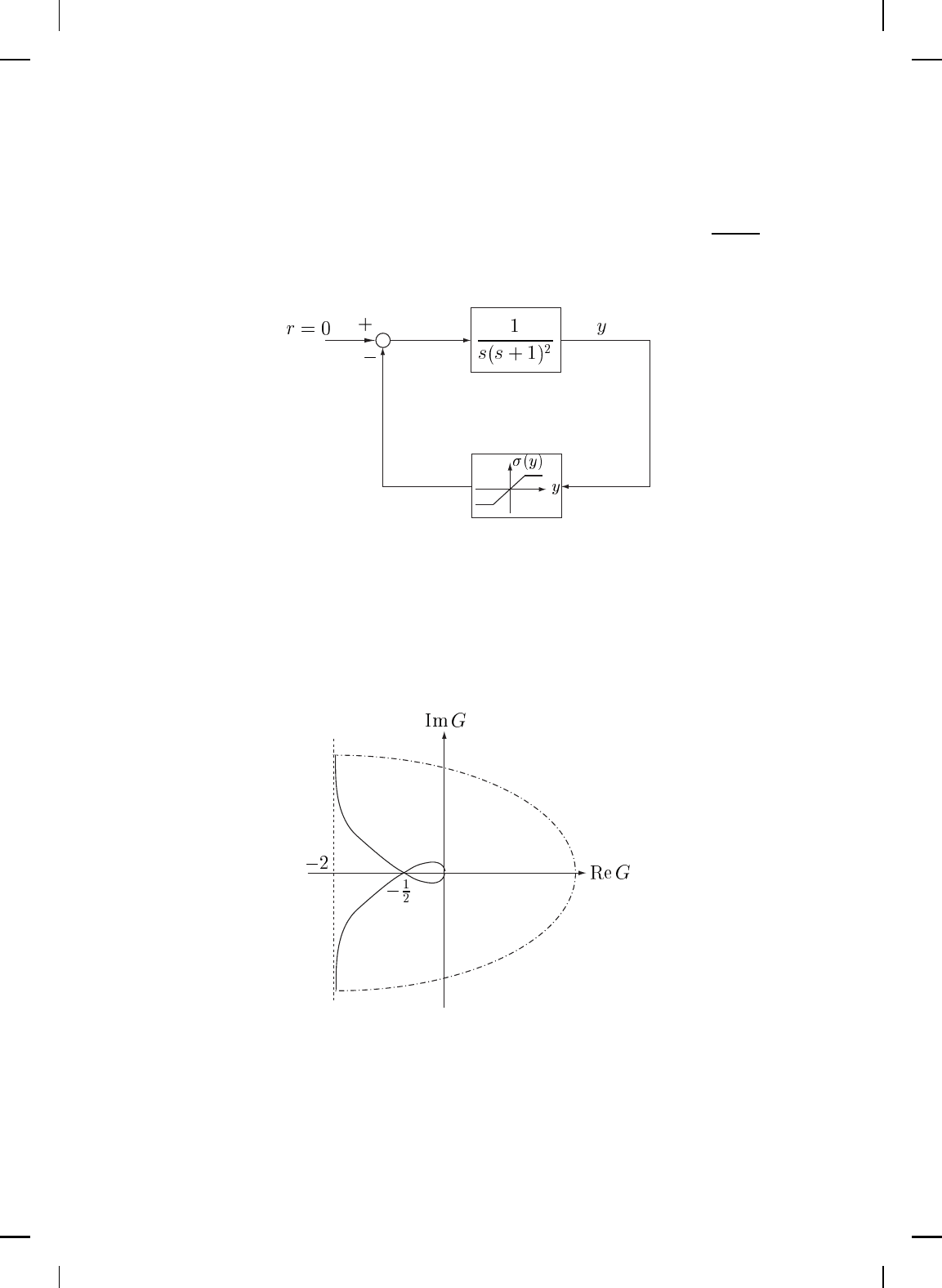
Example 5.7. Consider the linear dynamical system G(s) =
1
s(s+1)
2
with a saturation feedback nonlinearity belonging to the sector [0, M] shown
in Figure 5.3. Note that lim
ω →0
|G(ω)| = ∞, lim
ω →0
∠G(ω) = −90
◦
,
Figure 5.3 Feedback connection with saturation nonlinearity.
lim
ω →∞
|G(ω)| = 0, and lim
ω →∞
∠G(ω) = −270
◦
. Furthermore, the real
axis crossing of the Nyquist plot of G(ω) corresponds to ω = 1 rad/sec, and
hence, Re[G(ω)]|
ω = 1
= −1/2. Also note that Re[G(ω)]|
ω = 0
= − 2. Hence,
the Nyquist plot of G(ω) lies to the right of the vertical line Re[s] = −2 (see
Figure 5.4). Thus , it follows from the positivity theorem that the system is
globally exponentially stable for all nonlinearities in the sector [0, 0.5]. △
Figure 5.4 Nyquist plot for Example 5.7.
The positivity theorem applies to the case where the time-varying
feedback nonlinearity belongs to the sector Φ
pr
. Since in this case σ(y, t) ≡ 0
NonlinearBook10pt November 20, 2007
378 CHAPTER 5
is an admissible feedback nonlinearity, it is clear that a necessary condition
for guaranteeing absolute stability is that A be Hurwitz. Next, using loop
shifting techn iques, we consider the more general case where the feedback
nonlinearity belongs to the general s ector Φ. In this case, the r estriction on
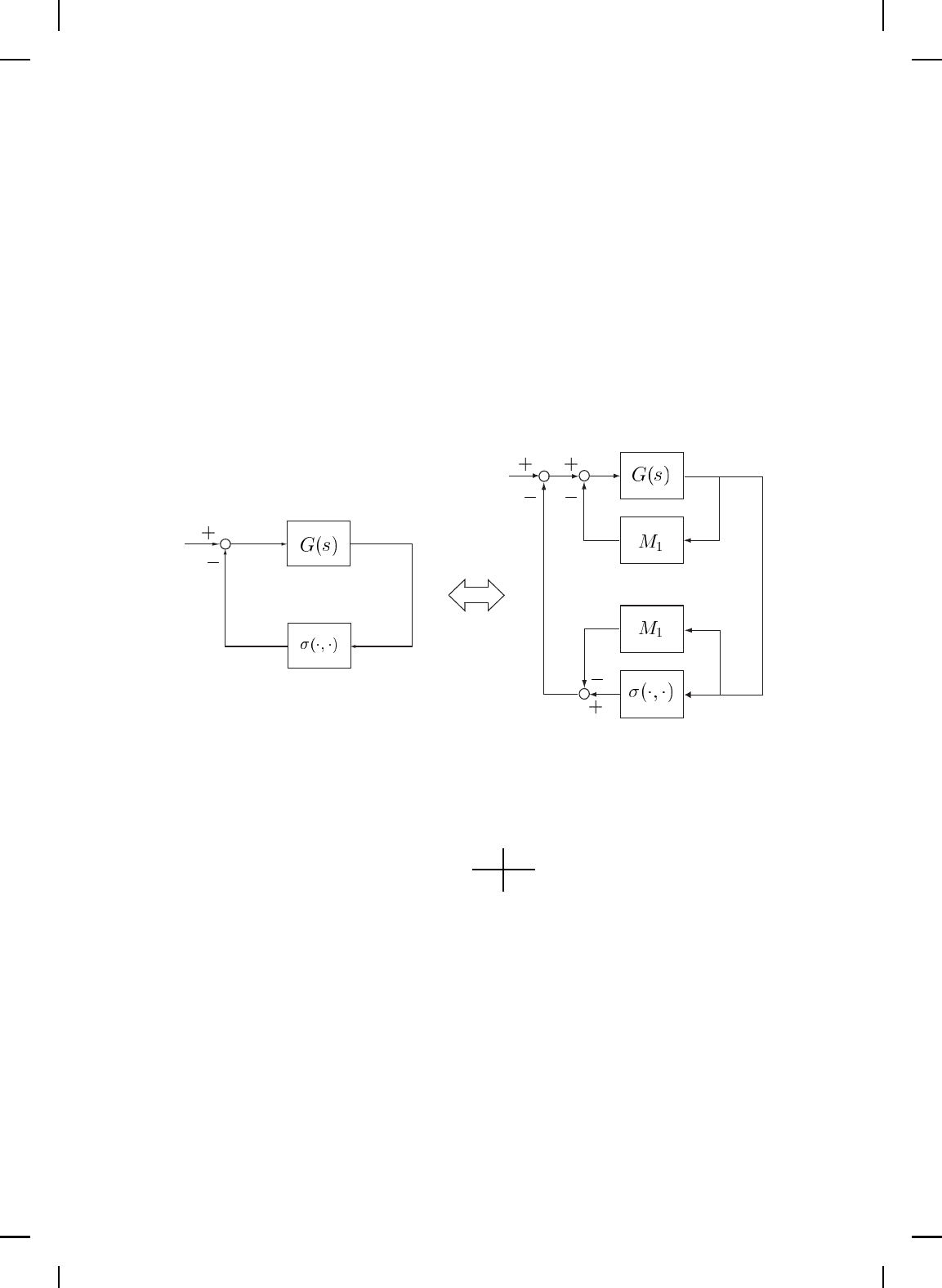
A being Hurw itz can be removed. To consider double sector nonlinearities
characterized by Φ note that if σ(·, ·) ∈ Φ , then the shifted nonlinearity
σ
s
(y, t)
△
= σ(y, t) − M
1
(y) belongs to Φ
pr
with M
△
= M
2
− M
1
. Hence,
transforming the forward path from G(s) to G
s
(s)
△
= (I + G(s)M
1
)
−1
G(s)
with feedback nonlinearity σ
s
(·, ·) ∈ Φ
pr
gives an equ ivalent r ep resentation
to the dynamical system G(s) with feedback nonlinearity σ(·, ·) ∈ Φ. This
equivalence is shown in Figure 5.5. Thus , the following result is a dir ect
consequence of Theorem 5.18.
Figure 5.5 Equivalence via loop shifting.
Corollary 5.8 (Circle Theorem). Consider the non linear dynamical
system (5.195)–(5.197). Suppose
G(s) ∼
A B
C D
is minimal, det[I
m
+ M
1
G(s)] 6= 0, Re[s] ≥ 0, and [I
m
+ M
2
G(s)][I
m
+
M
1
G(s)]
−1
is strictly positive real. T hen, the zero solution x(t) ≡ 0
of the negative feedback interconnection of (5.195)–(5.197) is globally
exponentially stable for all σ(·, ·) ∈ Φ.
Proof. It need only be shown that the transformed system satisfies
the hypotheses of Theorem 5.18. First, it follows from simple algebraic
manipulations th at [I + M
2
G(s)][I + M
1
G(s)]
−1
= I + (M
2
− M
1
)(I +
G(s)M
1
)
−1
G(s) = I +MG
s
(s). Hence, by assumption, I +MG
s
(s) is strictly
NonlinearBook10pt November 20, 2007
DISSIPATIVITY THEORY FOR NONLINEAR SYSTEMS 379
positive real. In addition, the realization of I + MG
s
(s) is given by
I + MG
s
(s) ∼
A − B(I + M
1
D)
−1
M
1
C B(I + M
1
D)
−1
M(I + DM
1
)
−1
C I + M(I + DM
1
)
−1
D
,
(5.210)
which is minimal if (A, B, C) is minimal. Hence, all the conditions of
Theorem 5.18 are satisfied for the transf ormed system G
s
(s) with feedback
nonlinearities σ
s
(·, ·) ∈ Φ
pr
.
Corollary 5.8 is known as the multivariable circle theorem or circle
criterion. Note that in the case where M
1
= 0, Corollary 5.8 specializes to
Theorem 5.18. Alternatively, in the case where M
1
= −γ
−1
I and M
2
=
γ
−1
I, where γ > 0, Corollary 5.8 reduces to the classical small gain theorem
which states that if G is gain bounded, that is, |||G(s)|||
∞
< γ, then the
zero solution of the feedback interconnection of G with a gain bounded
nonlinearity kσ(y, t)k
2
≤ γ
−1
kyk
2
, y ∈ R
l
, almost everywhere t ≥ 0, is
uniformly asymptotically stable. To see this, first note that in the case
where M
1
= −γ
−1
I and M
2
= γ
−1
I, Φ specializes to
Φ
br
△
= {σ : R
l
× R
+
→ R
m
: σ(0, ·) = 0, kσ(y, t)k
2
≤ γ
−1
kyk
2
, y ∈ R
l
,
a.e. t ≥ 0, and σ(y, ·) is Lebesgue measurable for all y ∈ R
l
}.
(5.211)
Furth ermore, the strict positive real condition in Corollary 5.8 implies
[I + γ
−1
G(ω)][I − γ
−1
G(ω)]
−1
+ [I − γ
−1
G
∗
(ω)]
−1
[I + γ
−1
G
∗
(ω)] > 0,
ω ∈ R, (5.212)
or, equivalently, forming [I − γ
−1
G
∗
(ω)](5.212)[I − γ
−1
G(ω)] yields
G
∗
(ω)G(ω) < γ
2
I, ω ∈ R,
λ
1/2
max
[G
∗
(ω)G(ω)] < γ, ω ∈ R,
σ
max
[G(ω)] < γ, ω ∈ R,
sup
ω ∈R
σ
max
[G(ω)] < γ,
|||G(s)|||
∞
< γ. (5.213)
In the scalar case, the circle criterion provides a very interesting and
elegant graphical interpretation in terms of an in clusion/exclusion of the
Nyquist plot of G(s) in/from a disk region in the Nyquist plane. To arrive
at this result, let M
1
6= 0, M
2
6= 0, and M
1
< M
2
, and n ote that setting
G(ω) = x + y, the strict positive real condition in Corollary 5.8 implies
that
Re
G(ω)
1 + M
1
G(ω)
+
1
M
2
− M
1
> 0, ω ∈ R, (5.214)

NonlinearBook10pt November 20, 2007
380 CHAPTER 5
or, equivalently,
(1 + M
2
x)(1 + M
1
x) + M
1
M
2
y
2
(1 + M
1
x)
2
+ M
2
1
y
2
> 0, ω ∈ R. (5.215)
Next, suppose A in the realization of G(s) has ν eigenvalues with
positive real parts. Then, it follows from the Nyquist criterion [445] that
G
s
(s) is asymptotically stable if and only if the number of counterclockwise
encirclements of the −1/M
1
+0 point of the image of the clockwise Nyquist
contour Γ under the mapping G(s) equals the number of unstable poles of
the loop gain transfer f unction M
1
G(s). Hence, it follows from Corollary
5.8 that the zero solution x(t) ≡ 0 of the negative feedback interconnection
of (5.195)–(5.197) is globally exponentially stable f or all σ(·, ·) ∈ Φ if th e
Nyquist plot of G(s) does not intersect the point −1/M
1
+ 0 and encircles
it ν times counterclockwise, and (5.214) holds. However, (5.214) holds if
and only if
(x + 1/M
1
)(x + 1/M
2
) + y
2
> 0, ω ∈ R, (5.216)
for M
1
M
2
> 0, and if and only if
(x + 1/M
1
)(x + 1/M
2
) + y
2
< 0, ω ∈ R, (5.217)
for M
1
M
2
< 0. Hence, (5.214) holds if and only if for all ω ∈ R, G(ω)
lies outside the disk D(M
1
, M
2
) centered at (M
1
+ M
2
)/(2M
1
M
2
+ 0) with
radius (M
2
− M
1
)/2|M
2
M
1
| in the case where M
1
M
2
> 0, and lies in the
interior of the disk D(M
1
, M
2
) in the case where M
1
M
2
< 0. In the former
case, if the Nyquist plot does not enter the disk D(M
1
, M
2
) and encircles
the point −1/M
1
+ 0 ν times counterclockwise, then th e Nyquist plot must
encircle the disk D(M
1
, M
2
) ν times and vice versa. In light of the above
the following theorem is immediate.
Theorem 5.19 (Circle Crit erion). Consider the nonlinear dynamical
system (5.195)–(5.197) with m = l = 1 and σ(·, ·) ∈ Φ. Furth ermore,
suppose A has ν eigenvalues with positive real parts. Then, the zero
solution x(t) ≡ 0 of the negative feedback interconnection of (5.195)–(5.197)
is globally exponentially stable for all σ(·, ·) ∈ Φ if one of the following
conditions is satisfied, as appropriate:
i) I f 0 < M
1
< M
2
, the Nyquist plot of G(ω) d oes not enter the disk
D(M
1
, M
2
) and encircles it ν times counterclockwise.
ii) If 0 = M
1
< M
2
, A is Hurwitz, and the Nyquist plot of G(ω) lies in
the half plane {s ∈ C : Re[s] > −1/M
2
}.
iii) If M
1
< 0 < M
2
, A is Hurwitz, and the Nyquist plot of G(ω) lies in
the interior of the disk D(M
1
, M
2
).

NonlinearBook10pt November 20, 2007
DISSIPATIVITY THEORY FOR NONLINEAR SYSTEMS 381
iv) If M
1
< M
2
≤ 0, replace G(·) by −G(·), M
1
by −M
2
, M
2
by −M
1
,
and apply i) or ii) as appropriate.
It is interesting to note that if M
1
= M
2
, then the critical d isk
D(M
1
, M
2
) collapses to the critical point −1/M
1
+ 0, and hence, the circle
criterion redu ces to the sufficiency portion of the Nyquist criterion. Figure
5.6 shows the five different cases addressed in Theorem 5.19 along with the
associated f orbidden regions in the Nyquist plane.
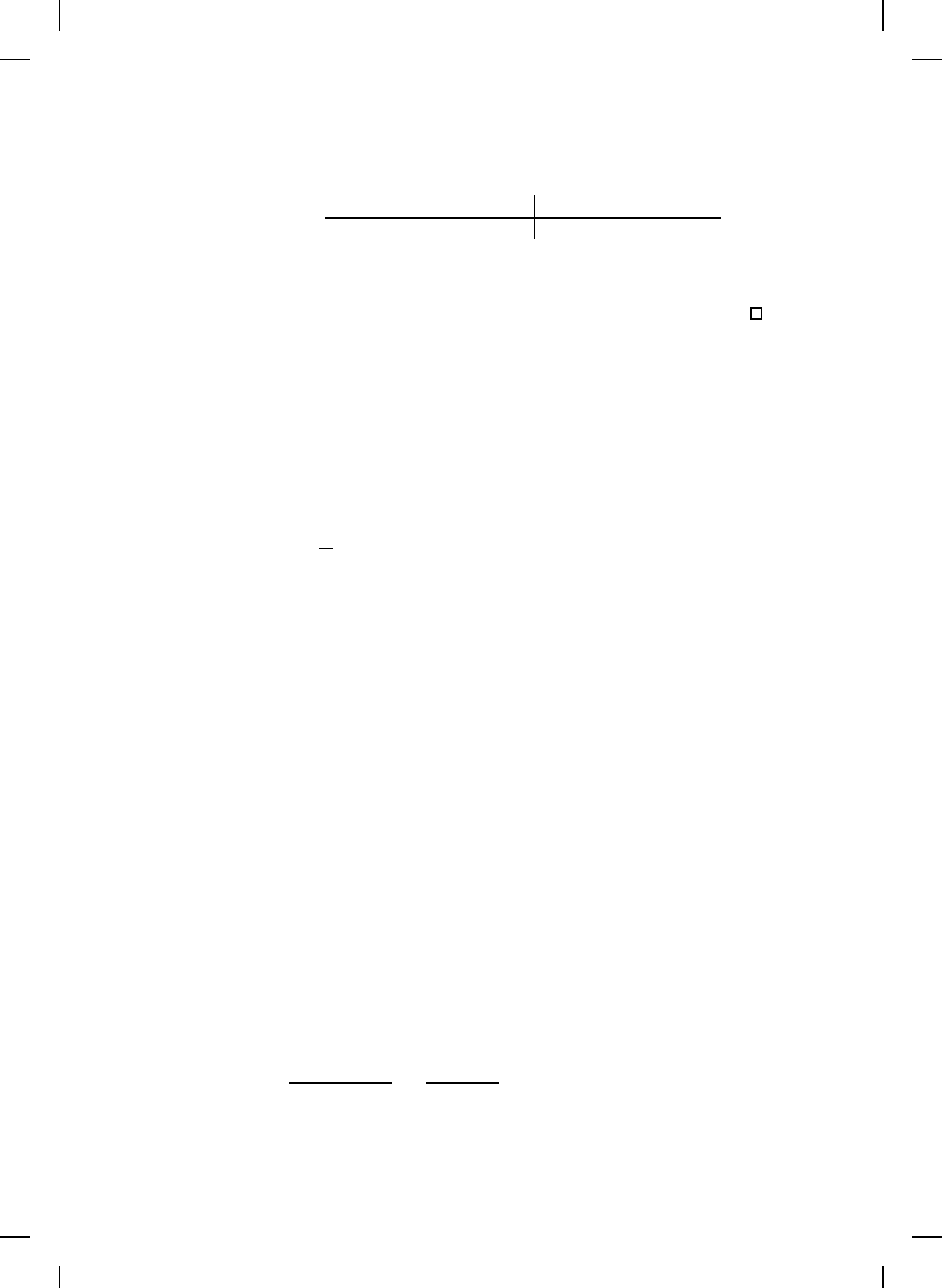
Example 5.8. Consider the linear dyn amical system
G(s) =
s + 1
s(0.1s + 1)
2
(s −1)
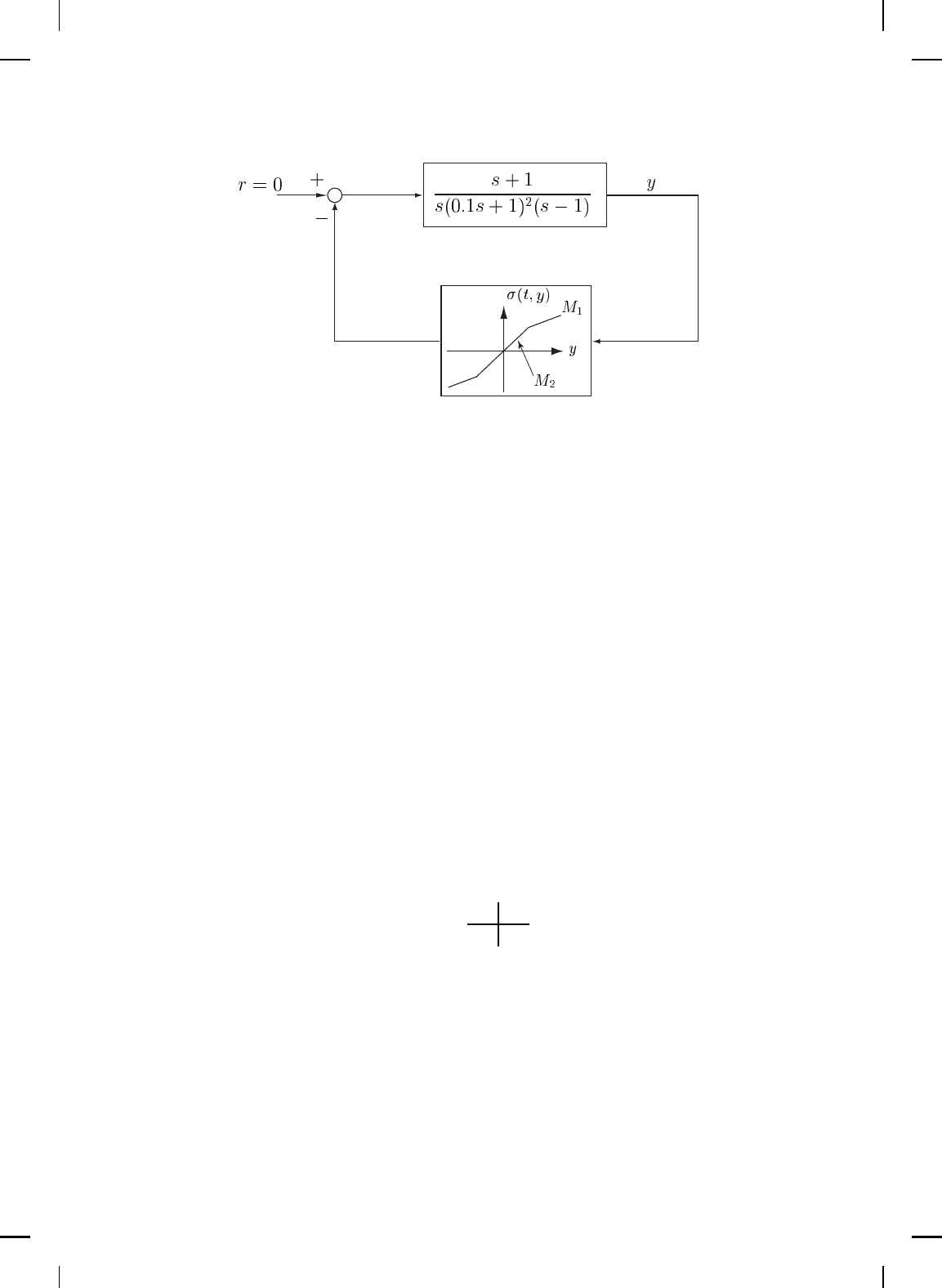
with feedback nonlinearity shown in Figure 5.7. The Nyquist plot of G(ω)
is shown in Figure 5.8. Since G(s) has one pole in the open right half
plane we use i) of the circle criterion. Specifically, we need to construct a
disk D(M
1
, M
2
) such that the Nyquist plot does not enter D(M
1
, M
2
) and
encircles it once counterclockwise. Inspecting the Nyquist plot of G(ω)
shows that the disk D(1.85, 3.34) is encircled once in the counterclockwise
direction by the left lobe of the Nyquist plot. Hence, we conclude that the
system is exponentially stable f or the nonlinearity shown in Figure 5.7 with
slopes M
1
= 1.85 and M
2
= 3.34. △
5.9 The Popov Criterion
In this section, we present another absolute stability criterion known as
the Pop ov criterion. Although often discussed in juxtaposition with the
circle criterion, the Popov criterion is fundamentally distinct from the circle
criterion in regard to its Lyapunov function foundation. Whereas the sm all
gain, positivity, and circle results are based upon fixed quadratic Lyapunov
functions, the Popov result is based upon a Lyapunov function that is a
function of the sector-bounded nonlinearity. In particular, in the sin gle-input
single-output case, the Popov criterion is based upon the Lur´e-Postnikov
Lyapunov function having the form
V (x) = x
T
P x + N
Z
y
0
σ(s)ds, (5.218)
where P > 0, N > 0, y = Cx, and σ(·) is a scalar memoryless time-invariant
nonlinearity belonging to the sector [0, M]. T hus, in effect, the Popov result
guarantees stability by m eans of a family of Lyapunov functions and, hence,
does not in general apply to time-varying n on linearities.
To present the multivariable Popov criterion, consider the dynamical

NonlinearBook10pt November 20, 2007
382 CHAPTER 5
σ(y, t)
σ(y, t)
σ(y, t)
σ(y, t)
σ(y, t)
y
y
y
y
y
Im G
Im G
Im G
Im G
Im G
Re G
Re G
Re G
Re G
Re G
M
2
y
M
1
y
M
2
y
M
1
y
M
2
y
M
1
y
My
My
−
1
M
1
−
1
M
2
−
1
M
1
−
1
M
2
−
1
M
2
−
1
M
1
−
1
M
−
1
M
Figure 5.6 Sector nonlinearities and forbidden Nyquist regions.
NonlinearBook10pt November 20, 2007
DISSIPATIVITY THEORY FOR NONLINEAR SYSTEMS 383
Figure 5.7 Feedback connection with multislope nonlinearity.
system
˙x(t) = Ax(t) + Bu(t), x(0) = x
0
, t ≥ 0, (5.219)
y(t) = Cx(t), (5.220)
where x(t) ∈ R
n
, u(t) ∈ R
m
, and y(t) ∈ R
m
, with feedback nonlinearity
u(t) = −σ(y(t)), (5.221)
where
σ(·) ∈ Φ
P
△
= {σ : R
m
→ R
m
: σ(0) = 0, σ
T
(y)[σ(y) − My] ≤ 0, y ∈ R
m
,
and σ(y) = [σ
1
(y
1
), σ
2
(y
2
), . . . , σ
m
(y
m
)]
T
}, (5.222)
where M ∈ R
m×m
and M > 0. Note that the components of σ are assumed
to be decoupled. If M = diag[M
1
, . . . , M
m
], M
i
> 0, i = 1, . . . , m, then the
sector condition characterizing Φ
P
is implied by the scalar sector conditions
0 ≤ σ
i
(y
i
)y
i
≤ M
i
y
2
i
, y
i
∈ R, i = 1, . . . , m, (5.223)
where y
i
∈ R denotes the ith component of y ∈ R
m
.
Theorem 5.20 (Popov Crit erion). Consider the nonlinear dynamical
system (5.219)–(5.221). Suppose
G(s) ∼
A B
C 0
is minimal, and assume there exists N = diag[N
1
, N
2
, . . . , N
m
], N
i
≥ 0,
i = 1, . . . , m, such th at I
m
+ M(I
m
+ Ns)G(s) is strictly positive real and
det(I
m
+ λN) 6= 0, where M = diag[M
1
, M
2
, . . . , M
m
] > 0 and λ ∈ spec(A).
Then, the zero solution x(t) ≡ 0 of the negative feedback interconnection of
(5.219)–(5.221) is globally asymp totically stable for all σ(·) ∈ Φ
P
.
Proof. First note that the negative feedback interconnection of
NonlinearBook10pt November 20, 2007
384 CHAPTER 5
−1.2 −1 −0.8 −0.6 −0.4 −0.2 0
−0.5
−0.4
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
−0.5394 −0.2994
Re G(jω)
Im G(jω)
Figure 5.8 Nyquist plot for Example 5.8.
(5.219)–(5.221) has the state space representation
˙x(t) = Ax(t) −Bσ(y(t)), x(0) = x
0
, t ≥ 0, (5.224)
y(t) = Cx(t). (5.225)
Next, noting that (I + N s)G(s) has a differentiation effect on the plant
transfer function G(s) it follows that the realization of I
m
+ M (I + Ns)G(s)
is given by
I
m
+ M (I + Ns)G(s) ∼
A B
MC + MNCA I
m
+ M NCB
. (5.226)
Since det(I
m
+ λN) 6= 0, λ ∈ spec(A), it follows th at the realization given
in (5.226) is minimal. To see this, note that (A, B) is controllable by
assumption. To show that (A, MC +M NCA) is observable or, equivalently,
(A, C + NCA) is observable since M > 0, assume, ad absurdum, that
(A, C + NCA) is not observable. In this case, since det(I
m
+ λN) 6= 0,
λ ∈ spec(A), it follows that there exists η ∈ C
m
, η 6= 0, such that
Aη = λη and Cη = 0, which implies that (A, C) is not observable, and
hence, contradicts the minimality assumption of G(s).
Next, it follows from Theorem 5.14 that if I
m
+ M(I
m
+ Ns)G(s) is
strictly positive real, then there exists matrices P ∈ R
n×n
, L ∈ R
p×n
, and
W ∈ R
p×m
, with P positive definite, and a scalar ε > 0 such that
0 = A
T
P + P A + εP + L
T
L, (5.227)