Haddad W.M. Nonlinear Dynamical Systems and Control: A Lyapunov-Based Approach
Подождите немного. Документ загружается.

NonlinearBook10pt November 20, 2007
Chapter Three
Stability Theory for Nonlinear
Dynamical Systems
3.1 Introduction
One of the most basic issues in system theory is stability of dynamical
systems. System stability is characterized by analyzing the response of a
dynamical system to small perturbations in the system states. Specifically,
an equilibr ium point of a dynamical system is said to be stable if, for
sufficiently small values of initial disturbances, the perturbed motion
remains in an arbitrarily prescribed small region of the state space. More
precisely, stability is equivalent to continuity of solutions as a function
of the system initial conditions over a neighborhood of the equilibrium
point uniformly in time. If, in addition, all solutions of the dynamical
system approach the equilibrium point for large values of time, then the
equilibrium point is said to be asymptotically stable. The most complete
contribution to the stability analysis of nonlinear dynamical systems was
introduced in the late nineteenth century by the R ussian mathematician
A. M. Lyapun ov in his seminal work entitled The General Problem of
the Stability of Motion [293–295]. Lyapunov’s r esults which include the
direct and indirect methods, along w ith the Barbashin -Krasovskii-LaSalle
invariance principle [23, 245, 258, 260], provide a powerful framework for
analyzing the stability of nonlinear dynamical systems as well as designing
feedback controllers that guarantee closed-loop system stability.
Lyapunov’s direct method states that if a continuously differentiable
positive-definite function of the states of a given dynamical system can be
constructed for which its time rate of change d ue to perturbations in a
neighborhood of the system’s equilibrium is always n egative or zero, then
the system’s equilibrium point is stable or, equivalently, Lyapunov stable.
Alternatively, if the time rate of change of the positive-definite function
is strictly negative, then th e system’s equilibrium point is asymptotically
stable. Unlike L yapunov’s direct method, which can provide global stability
conclusions for an equilibrium point for a non linear dynamical system,

NonlinearBook10pt November 20, 2007
136 CHAPTER 3
Lyapunov’s indirect method draws conclusions about local stability of the
equilibrium point by examining the stability of the linearized nonlinear
system about the equilibrium point in question. Since the analysis and
controller design frameworks presented in this book are predominantly based
on Lyapunov stability theory, in this chapter we present the main Lyapunov
stability results needed for developing these frameworks.
3.2 Lyapunov Stability Theory
In this section, we develop the fundamental results of Lyapunov stability
theory. We begin by considering the general nonlinear autonomous
dynamical system
˙x(t) = f(x(t)), x(0) = x
0
, t ∈ I
x
0
, (3.1)
where x(t) ∈ D ⊆ R
n
, t ∈ I
x
0
, is the s y s tem state vector, D is an open set
with 0 ∈ D, f : D → R
n
is continuous on D, and I
x
0
= [0, τ
x
0
), 0 ≤ τ
x
0
≤ ∞.
We assume that for every initial condition x(0) ∈ D and every τ
x
0
> 0, the
dynamical system (3.1) possesses a unique solution x : [0, τ
x
0
) → D on the
interval [0, τ
x
0
). We denote the solution to (3.1) with initial condition x(0) =
x
0
by s(·, x
0
), s o that the fl ow of the dynamical sys tem (3.1) given by the
map s : [0, τ
x
0
) × D → D is continuous in x and continuously differentiable
in t and satisfies the consistency property s(0, x
0
) = x
0
and the semigroup
property s(τ, s(t, x
0
)) = s(t + τ, x
0
), for all x
0
∈ D and t, τ ∈ [0, τ
x
0
) such
that t + τ ∈ [0, τ
x
0
). Unless otherwise stated, we assume f(0) = 0 and f (·)
is Lipschitz continuous on D. The following definition introduces several
types of s tability corresponding to the zero solution x(t) ≡ 0 of (3.1) for
I
x
0
= [0, ∞).
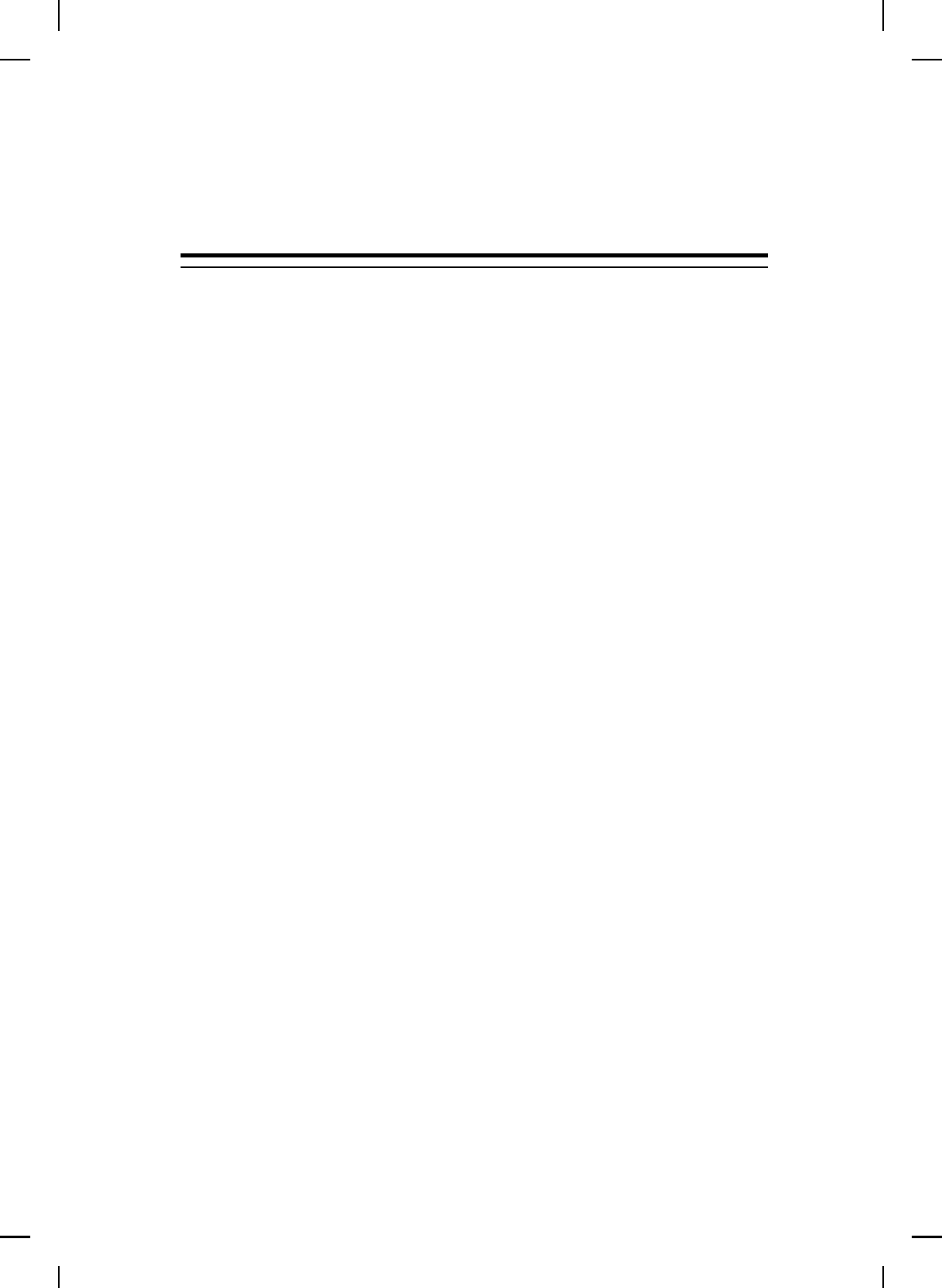
Definition 3.1. i) The zero solution x(t) ≡ 0 to (3.1) is Lyapunov
stable if, for all ε > 0, there exists δ = δ(ε) > 0 such that if kx(0)k < δ, then
kx(t)k < ε, t ≥ 0 (see Figure 3.1).
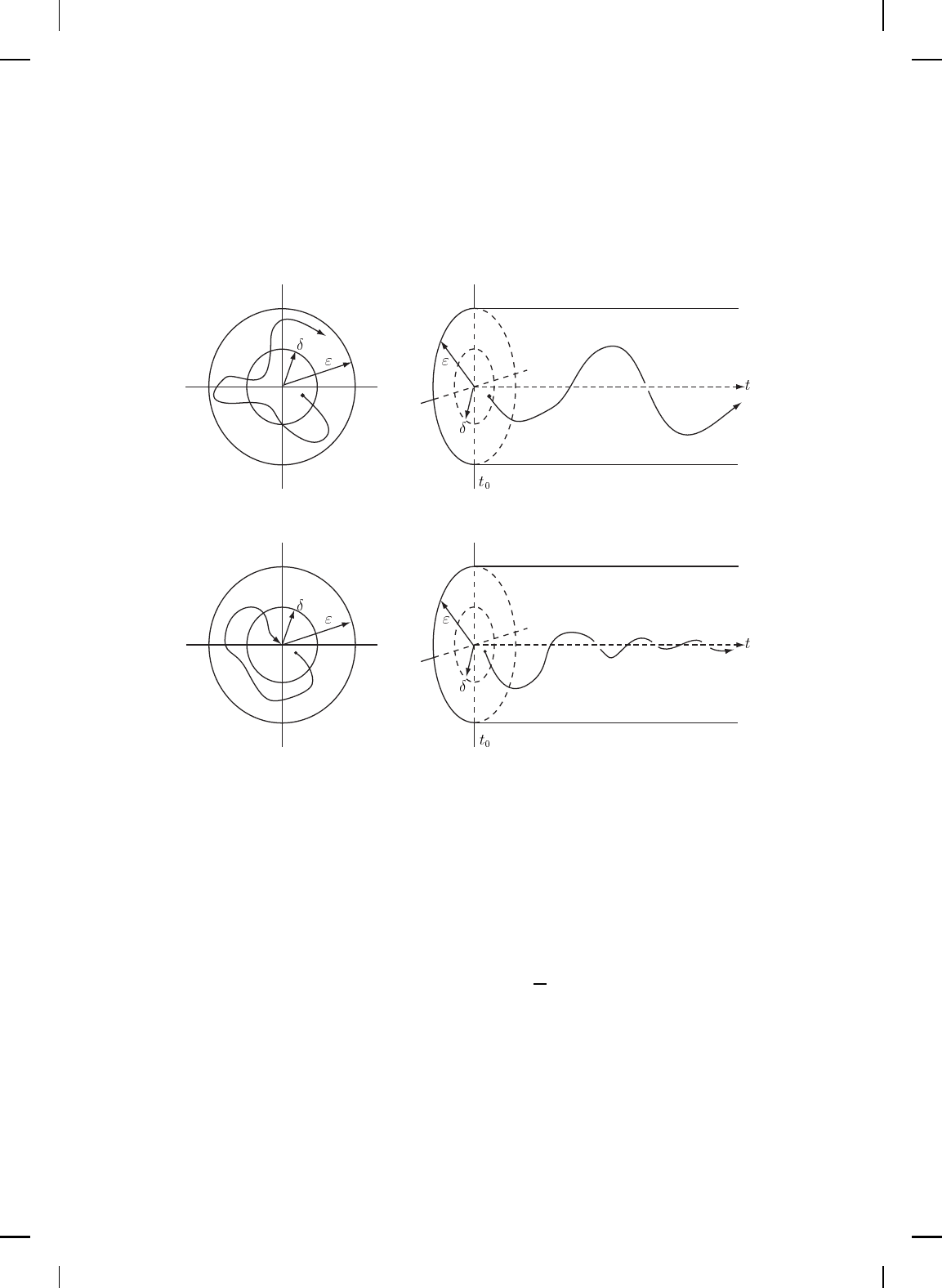
ii) The zero solution x(t) ≡ 0 to (3.1) is (locally) asymptotically stable
if it is Lyapunov stable and there exists δ > 0 such that if kx(0)k < δ, then
lim
t→∞
x(t) = 0 (see Figure 3.2).
iii) The zero solution x(t) ≡ 0 to (3.1) is (locally) exponentially stable
if there exist positive constants α, β, and δ such that if kx(0)k < δ, then
kx(t)k ≤ αkx(0)ke
−βt
, t ≥ 0.
iv) The zero solution x(t) ≡ 0 to (3.1) is globally asymptotically stable
if it is Lyapunov stable and for all x(0) ∈ R
n
, lim
t→∞
x(t) = 0.
v) The zero solution x(t) ≡ 0 to (3.1) is globally exponentially stable
NonlinearBook10pt November 20, 2007
STABILITY THEORY FOR NONLINEAR SYSTEMS 137
if there exist positive constants α and β such that kx(t)k ≤ αkx(0)ke
−βt
,
t ≥ 0, for all x(0) ∈ R
n
.
vi) Finally, the zero solution x(t) ≡ 0 to (3.1) is unstable if it is not
Lyapunov s table.
Figure 3.1 Lyapunov stability of an equilibrium point.
Figure 3.2 Asymp totic stability of an equilibrium point.
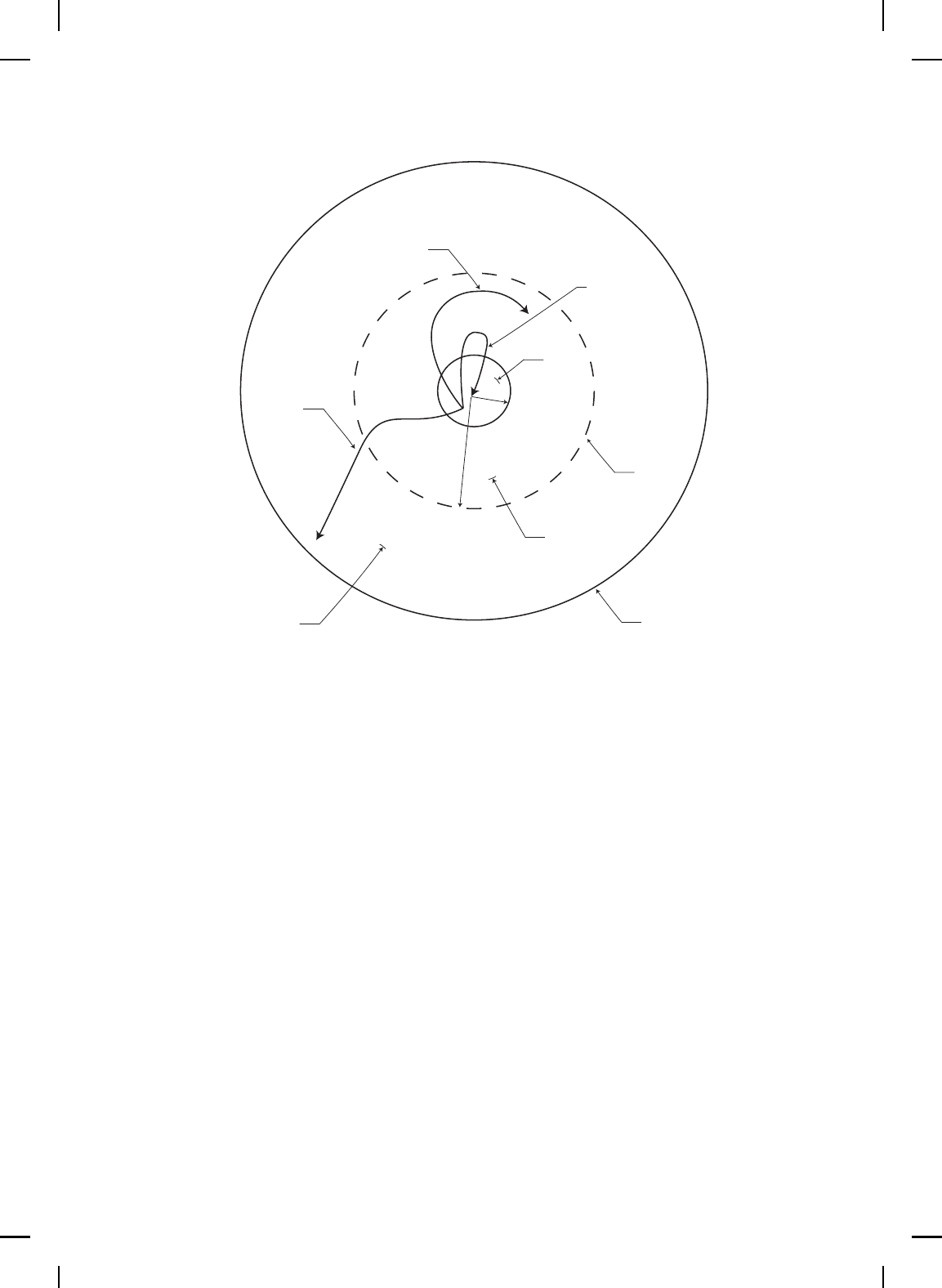
Figure 3.3 shows the asymptotic stability, Lyapunov stability, and
instability notions of an equ ilibr ium point. Clearly, exponential stability
implies asymptotic stability and asymptotic stability implies Lyapunov
stability. The following result, kn own as Lyapunov’s direct method, gives
sufficient conditions for Lyapunov, asymptotic, and exponential s tability of a
nonlinear dynamical sys tem. For this result, let V : D → R be a continuously
differentiable function with derivative along the trajectories of (3.1) given
by
˙
V (x)
△
= V
′
(x)f(x). Note that
˙
V (x) is dependent on the system dynamics
(3.1). Since, using the chain rule,
˙
V (x) =
d
dt
V (s(t, x))
t=0
= V
′
(x)f(x)
it follows that if
˙
V (x) is negative, then V (x) decreases along the solution
s(t, x
0
) of (3.1) through x
0
∈ D at t = 0.
Theorem 3.1 (Lyapunov’s Theorem). Consider the nonlinear dynam-
ical system (3.1) and assume that there exists a continuously differentiable
NonlinearBook10pt November 20, 2007
138 CHAPTER 3
Lyapunov Stable
Unstable
Asymptotically
Stable
0
x
0
δ
∂B
ε
(0)
B
ε
(0)
∂DD
ε
B
δ
(0)
Figure 3.3 Asymp totically stable, Lyapunov stable, and unstable equilibrium point.
function V : D → R such that
V (0) = 0, (3.2)
V (x) > 0, x ∈ D, x 6= 0, (3.3)
V
′
(x)f(x) ≤ 0, x ∈ D. (3.4)
Then the zero solution x(t) ≡ 0 to (3.1) is Lyapunov stable. If, in addition,
V
′
(x)f(x) < 0, x ∈ D, x 6= 0, (3.5)
then the zero solution x(t) ≡ 0 to (3.1) is asymptotically stable. Finally, if
there exist scalars α, β, ε > 0, and p ≥ 1, such that V : D → R satisfies
αkxk
p
≤ V (x) ≤ βkxk
p
, x ∈ D, (3.6)
V
′
(x)f(x) ≤ −εV (x), x ∈ D, (3.7)
then the zero solution x(t) ≡ 0 to (3.1) is exponentially stable.
Proof. Let ε > 0 be such that B
ε
(0) ⊆ D. Since ∂B
ε
(0) is compact
and V (x), x ∈ D, is continuous, it follows that V (∂B
ε
(0)) is compact (see
Proposition 2.14), and hence, by Theorem 2.13, α
△
= min
x∈∂B
ε
(0)
V (x) exists.
Note α > 0 since 0 6∈ ∂B
ε
(0) and V (x) > 0, x ∈ D, x 6= 0. Next, let
NonlinearBook10pt November 20, 2007
STABILITY THEORY FOR NONLINEAR SYSTEMS 139
β ∈ (0, α) and define D
β
to be the arcwise connected component of {x ∈ D :
V (x) ≤ β} containing the origin; that is, D
β
is the set of all x ∈ D such
that there exists a continuous fun ction ψ : [0, 1] → D such that ψ(0) = x,
ψ(1) = 0, and V (ψ(µ)) ≤ β, for all µ ∈ [0, 1].
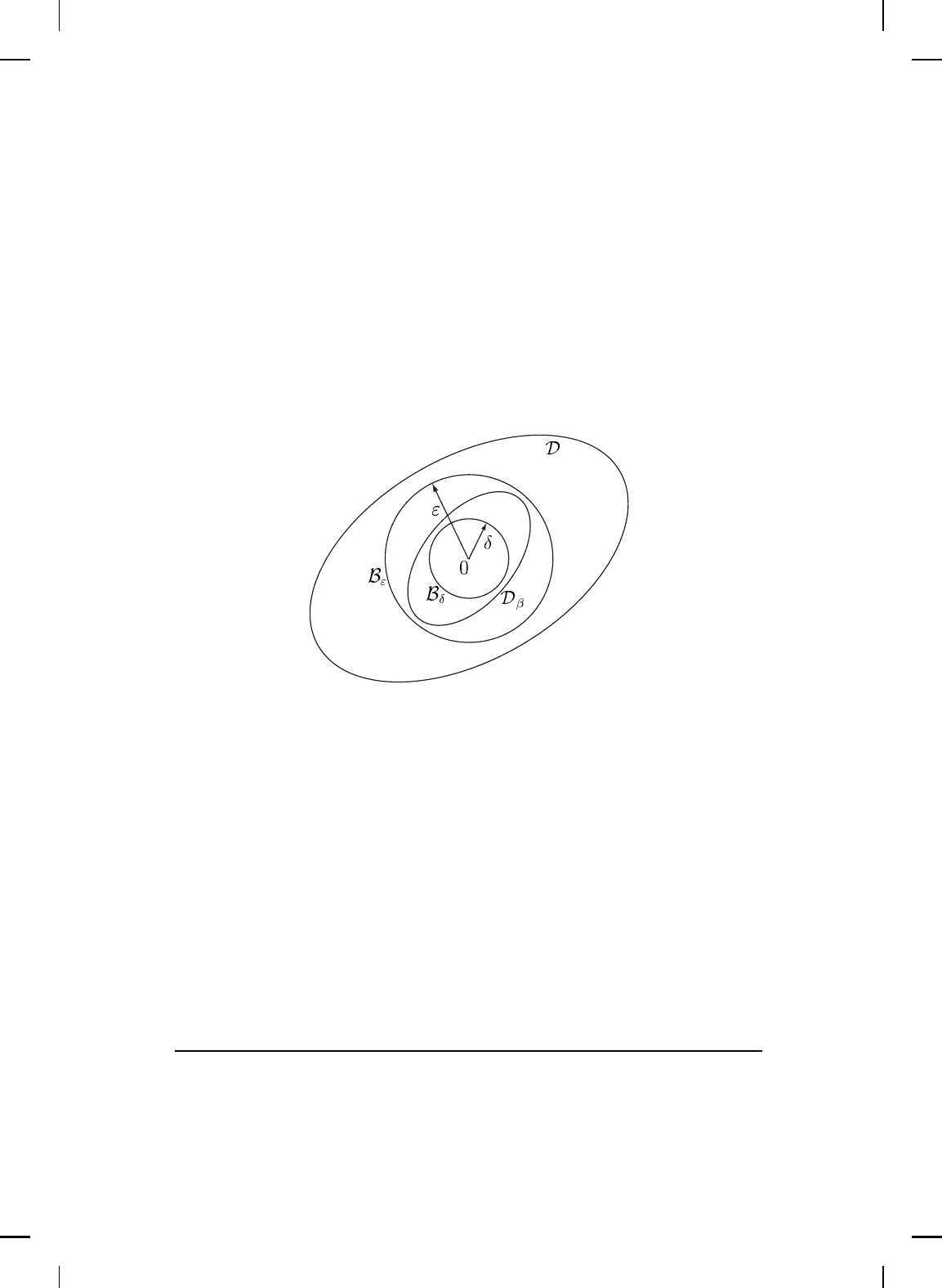
1
Note that D
β
⊂ B
ε
(0)
(see Figure 3.4). To see this, suppose, ad absurdum, that D
β
6⊂ B
ε
(0). In
this case, there exists a point p ∈ D
β
such that p ∈ ∂B
ε
(0), and hence,
V (p) ≥ α > β, which is a contradiction. Now, since
˙
V (x)
△
= V
′
(x)f(x) ≤ 0,
x ∈ D
β
, it follows that V (x(t)) is a nonincreasing function of time, and
hence, V (x(t)) ≤ V (x(0)) ≤ β, t ≥ 0. Hence, D
β
is a positively invariant
set with respect to (3.1). Furthermore, since D
β
is compact, it follows from
Corollary 2.5 that for all x(0) ∈ D
β
, (3.1) has a unique solution defined for
all t ≥ 0.
Figure 3.4 Visualization of sets used in the proof of Theorem 3.1.
Next, since V (·) is continuous and V (0) = 0, there exists δ = δ(ε) ∈
(0, ε) such that V (x) < β, x ∈ B
δ
(0). Now, let x(t), t ≥ 0, satisfy (3.1) with
kx(0)k < δ. Since, B
δ
(0) ⊂ D
β
⊂ B
ε
(0) ⊆ D and V
′
(x)f(x) ≤ 0, x ∈ D, it
follows that
V (x(t)) − V (x(0)) =
Z
t
0
V
′
(x(s))f(x(s))ds ≤ 0, t ≥ 0,
and h en ce, for all x(0) ∈ B
δ
(0),
V (x(t)) ≤ V (x(0)) < β, t ≥ 0.
Now, since V (x) ≥ α, x ∈ ∂B
ε
(0), an d β ∈ (0, α), it follows that x(t) 6∈
∂B
ε
(0), t ≥ 0. Hence, for all ε > 0 there exists δ = δ(ε) > 0 such that if
kx(0)k < δ, then kx(t)k < ε, t ≥ 0, w hich proves Lyapunov stability of the
zero solution x(t) ≡ 0 to (3.1).
1
Unless otherwise stated, in the remainder of the book we assume that sets of the form D
β
=
{x ∈ D : V (x) ≤ β} correspond to the arcwise connected component of {x ∈ D : V (x) ≤ β}
containing the origi n. This minor abuse of notation considerably simplifies the presentation.
NonlinearBook10pt November 20, 2007
140 CHAPTER 3
To prove asymptotic stability of the zero solution x(t) ≡ 0 to (3.1)
suppose that V
′
(x)f(x) < 0, x ∈ D, x 6= 0, and x(0) ∈ B
δ
(0). Then it
follows that x(t) ∈ B
ε
(0), t ≥ 0. However, V (x(t)), t ≥ 0, is decreasing and
bounded from below by zero. Now, ad absurdum, suppose x(t), t ≥ 0, does
not converge to zero. This implies that V (x(t)), t ≥ 0, is lower bounded,
that is, there exists L > 0 such that V (x(t)) ≥ L > 0, t ≥ 0. Hence, by
continuity of V (·) there exists δ
′
> 0 such that V (x) < L for x ∈ B
δ
′
(0),
which further implies that x(t) 6∈ B
δ
′
(0) for all t ≥ 0. Next, define L
1
△
=
min
δ
′
≤kxk≤ε
−V
′
(x)f(x). Now, (3.5) implies −V
′
(x)f(x) ≥ L
1
, δ
′
≤ kxk ≤ ε
or, equivalently,
V (x(t)) − V (x(0)) =
Z
t
0
V
′
(x(s))f(x(s))ds ≤ −L
1
t,
and h en ce, for all x(0) ∈ B
δ
(0),
V (x(t)) ≤ V (x(0)) − L
1
t.
Letting t >
V (x(0))−L
L
1
, it follows that V (x(t)) < L, which is a contradiction.
Hence, x(t) → 0 as t → ∞, establishing asymptotic stability.
Finally, to prove exponential stability of the zero solution x(t) ≡ 0 to
(3.1) note that (3.7) implies
V (x(t)) ≤ V (x(0))e
−εt
, t ≥ 0. (3.8)
Now, sin ce by assumption V (x(0)) ≤ βkx(0)k
p
and αkx(t)k
p
≤ V (x(t)), it
follows that
αkx(t)k
p
≤ βkx(0)k
p
e
−εt
, t ≥ 0, (3.9)
which implies that
kx(t)k ≤
β
α
1/p
kx(0)ke
(−ε/p)t
, t ≥ 0, (3.10)
establishing exponential stability.
If x
e
6= 0 is an equilibrium point of (3.1), then Theorem 3.1 holds with
V (0) = 0 and x 6= 0 replaced by V (x
e
) = 0 and x 6= x
e
(see Problem 3.39
for details). A continuously differentiable function V (·) satisfying (3.2) and
(3.3) is called a Lyapunov function candidate for the nonlinear dynamical
system (3.1). If, additionally, V (·) satisfies (3.4), V (·) is called a Lyapunov
function for the nonlinear dynamical system (3.1).
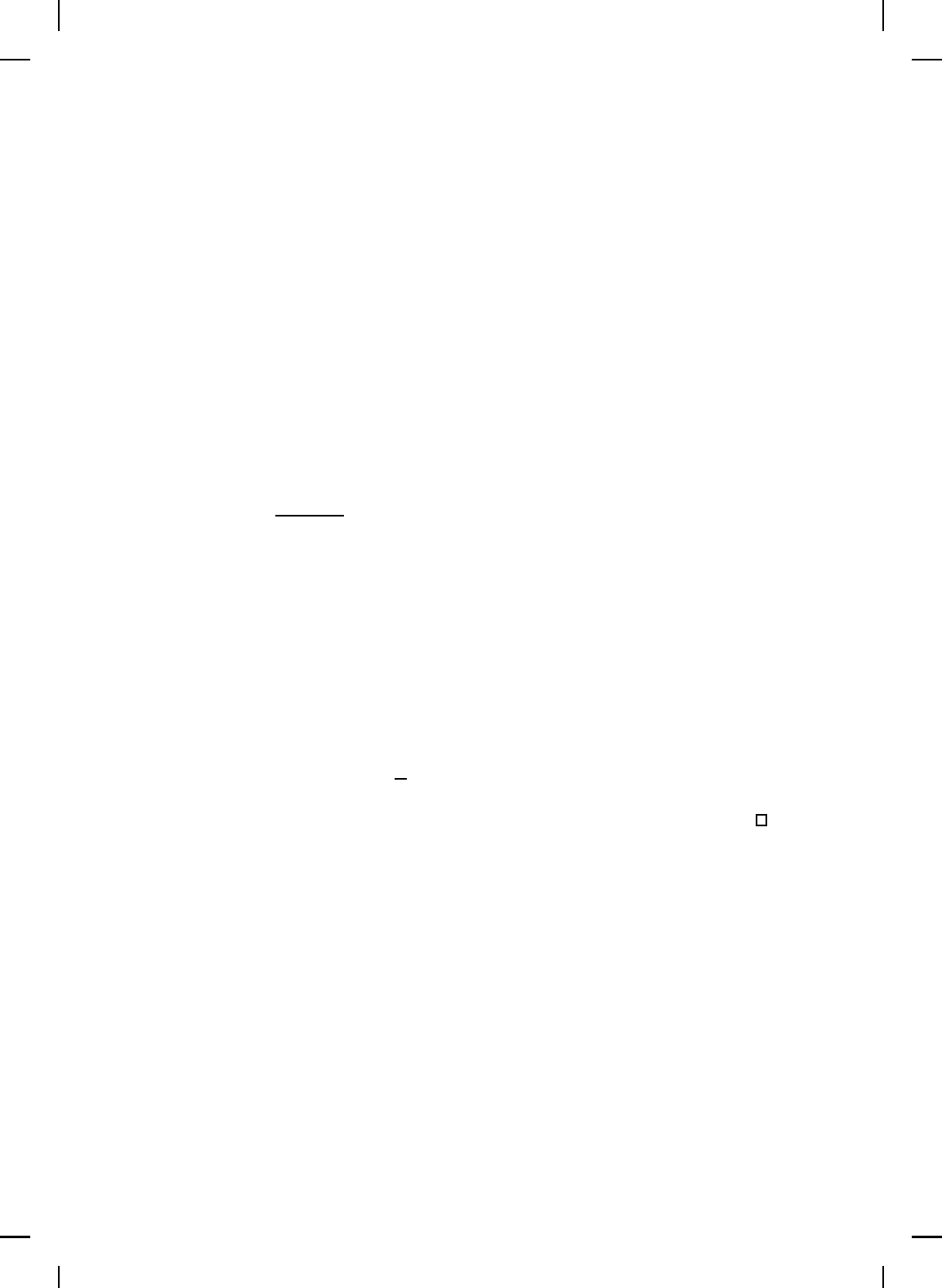
In light of conditions (3.2)–(3.5), V (·) can be regarded as a generalized
energy function for the nonlinear dynamical system (3.1). In particular,
viewing the Lyapunov level surfaces V (x) = α, for sufficiently small
constants α > 0, as constant energy surfaces covering th e neighborhood
D
β
⊂ B
ε
(0), where V (x
0
) = β, of the non linear dyn amical system (3.1), it
NonlinearBook10pt November 20, 2007
STABILITY THEORY FOR NONLINEAR SYSTEMS 141
follows from Theorem 3.1 that r equ ir ing the Lyapunov derivative
˙
V (x)
△
=
V
′
(x)f(x) to be negative, the system traj ectories of (3.1) move from one
energy surface to an inner, or lower, en ergy surface. Of course, if condition
(3.4) is satisfied, the system trajectories will approach the origin and remain
within a ball of radiu s ε > 0 of the origin for every sys tem initial condition
lying inside a constant energy surface contained in the ball of radius ε.
Alternatively, if condition (3.5) is satisfied, then the system’s energy surfaces
shrink to zero so that the system trajectory approaches zero asymptotically
(see Figure 3.5).
For planar (R
2
) systems the Lyapunov function provides the following
interpretation. For a given solution s(t, x
0
) of (3.1) to cross the constant
energy surface V (x) = β, w here β = V (x
0
), the angle between the outward
normal of the gradient vector V (x
0
) and the derivative of s(t, x
0
) at t = t
0
must be greater than π/2, that is,
˙
V (x
0
) = V
′
(x
0
)f(x
0
) < 0. For this to
occur at all points, we require
˙
V (x) = V
′
(x)f(x) < 0, x ∈ D
β
. Hence,
V (s(t, x
0
)) is a decreasing function of time. This of course implies that
˙
V (s(t, x)) along the solution s(t, x
0
) of (3.1) must be negative in D
β
.
Figure 3.5 (a) Typical Lyapunov function candidate. (b ) Constant Lyapunov energy
surfaces. For both figures α
1
< α
2
< α
3
.
Example 3.1. Consider the nonlinear dynamical system representing
a rigid spacecraft given by
˙x
1
(t) = I
23
x
2
(t)x
3
(t), x
1
(0) = x
10
, t ≥ 0, (3.11)
˙x
2
(t) = I
31
x
3
(t)x
1
(t), x
2
(0) = x
20
, (3.12)
˙x
3
(t) = I
12
x
1
(t)x
2
(t), x
3
(0) = x
30
, (3.13)
where I
23
= (I
2
− I
3
)/I
1
, I
31
= (I
3
− I
1
)/I
2
, I
12
= (I
1
− I
2
)/I
3
, and I
1
,
I
2
, and I
3
are the principal moments of inertia of the spacecraft such that
I
1
> I
2
> I
3
> 0. To examine the stability of this system consider the
NonlinearBook10pt November 20, 2007
142 CHAPTER 3
Lyapunov function candid ate V (x
1
, x
2
, x
3
) =
1
2
(α
1
x
2
1
+ α
2
x
2
2
+ α
3
x
2
3
), where
α
1
, α
2
, α
3
> 0. Now, the Lyapu nov d erivative is given by
˙
V (x
1
, x
2
, x
3
) = α
1
x
1
˙x
1
+ α
2
x
2
˙x
2
+ α
3
x
3
˙x
3
= x
1
x
2
x
3
(α
1
I
23
+ α
2
I
31
+ α
3
I
12
).
(3.14)
Since I
31
< 0 it follows that there exist α
1
, α
2
, α
3
> 0 such that α
1
I
23
+
α
2
I
31
+ α
3
I
12
= 0. In this case,
˙
V (x
1
, x
2
, x
3
) = 0, and hence, the zero
solution to (3.11)–(3.13) is Lyapunov stable. S how that the zero solution to
(3.11)–(3.13) is Lyapunov stable without the constraint I
1
> I
2
> I
3
> 0 so
long as I
1
, I
2
, I
3
> 0. △
Example 3.2. Consider the nonlinear dynamical system describing the
motion of a simple pendulum with viscous damping given by
¨
θ(t) +
˙
θ(t) +
g
l
sin θ(t) = 0, θ(0) = θ
0
,
˙
θ(0) =
˙
θ
0
, t ≥ 0, (3.15)
where g is the acceleration due to gravity and l is the length of the pen dulum.
To analyze the stability of this s ystem consider the Lyapunov function
candidate
V (θ,
˙
θ) =
1
2
˙
θ
2
+
1
2
(θ +
˙
θ)
2
+
2g
l
(1 − cos θ). (3.16)
Now, the L yapunov derivative is given by
˙
V (θ,
˙
θ) =
˙
θ
¨
θ + (θ +
˙
θ)(
˙
θ +
¨
θ) +
2g
l
˙
θ sin θ = −(
˙
θ
2
+
g
l
θ sin θ), (3.17)
which is locally negative definite, and hence, the s imple pendulum with
viscous damping is locally asymptotically stable. Show that the e ne rgy
Lyapunov function V (θ,
˙
θ) =
1
2
˙
θ
2
+
g
l
(1 − cos θ) fails to show that the
Lyapunov derivative is strictly decreasing and, hence, cannot be used in
conjunction with Theorem 3.1 to establish asymptotic stability of (3.15).△
Theorem 3.1 can be used to provide an estimate of the domain of
attraction for the nonlinear dynamical system (3.1); th at is, finding an
open connected set D
0
in R
n
containing the origin with the property that
every trajectory starting in D
0
converges to the origin as time approaches
infinity. It is important to note here that (3.3) and (3.5) are not sufficient to
guarantee that every solution th at starts in D will remain in D for all time.
However, if (3.3) and (3.5) hold, then every i nv ariant set of the nonlinear
dynamical system (3.1) contained in D is also contained in the domain of
attraction D
0
of (3.1). As shown in the proof of Theorem 3.1 if there exists
a Lyapunov function V : D → R such th at (3.2), (3.3), and (3.5) hold, and
if D
β
= {x ∈ D : V (x) ≤ β} is bounded, then D
β
is a positively invariant set
with respect to (3.1) and every system trajectory starting in D
β
converges
to the origin as time approaches infinity. Hence, D
β
is an estimate of the
domain of attraction. The question is then how large can we take β > 0 such
that D
β
remains bound ed ? Since V (·) is continuous and positive definite,
there always exists a small enough β > 0 such that the Lyapunov level
surface V (x) ≡ β is bounded, and hence, D
β
is bounded since D
β
⊂ B
ε
(0)

NonlinearBook10pt November 20, 2007
STABILITY THEORY FOR NONLINEAR SYSTEMS 143
for some ε > 0. However, depending on the structure of V (·), as β in creases
the Lyapunov level surface V (x) = β can be unbounded, and hence, D
β
becomes unbounded. For D
β
⊂ B
ε
(0), β must satisfy β < inf
kxk≥ε
V (x).
Hence, if β < γ, where
γ = lim
ε→∞
inf
kxk≥ε
V (x) < ∞ (3.18)
and γ > 0, then D
β
is guaranteed to be bound ed .
Next, we give a precise definition for the domain, or region, of
attraction of the zero solution x(t) ≡ 0 of the nonlinear dynamical system
(3.1).
Definition 3.2. Suppose the zero solution x(t) ≡ 0 to (3.1) is
asymptotically stable. Then the domain of attraction D
0
⊆ D of (3.1) is
given by
D
0
△
= {x
0
∈ D : if x(0) = x
0
, then lim
t→∞
x(t) = 0}. (3.19)
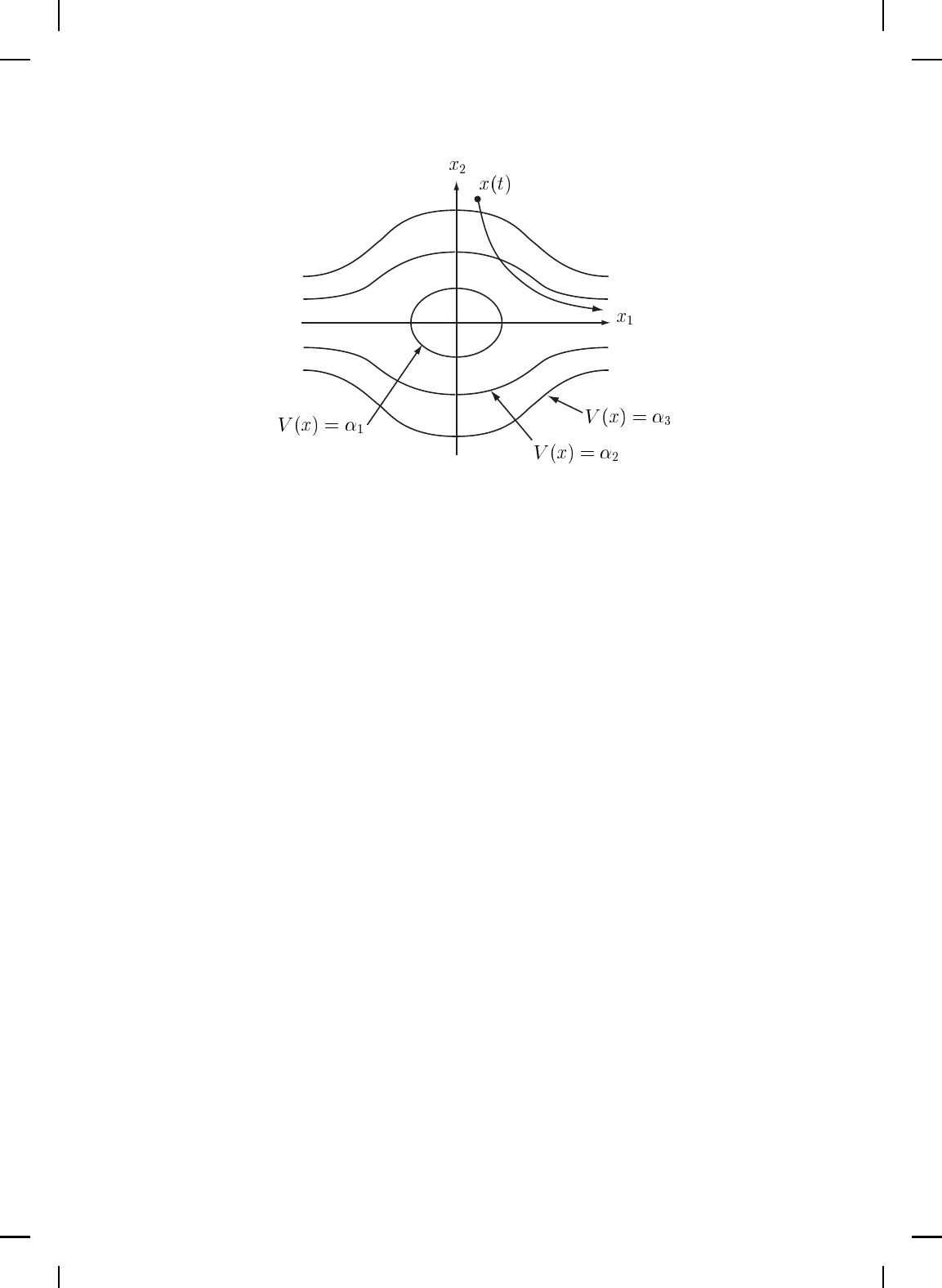
As discussed above, the motivation for constructing the domain of
attraction of a nonlinear dynamical system follows from the fact that there
is no guarantee that a system trajectory starting in a subset D of the state
space will remain in D even though the Lyapunov derivative is negative
in D, that is, the system trajectories move from one energy level to an
inner energy level (see Figure 3.6). The problem of constructing the domain
of attraction for locally stable nonlinear dyn amical systems has received
considerable attention in the literature [102, 174, 178, 285, 314, 443, 481].
Since, however, constructing the actual domain of attraction of a nonlinear
dynamical system is system trajectory d ependent, most of the techniques
proposed in th e literature p rovide a guaranteed sub s et of the domain of
attraction.
To estimate a subset of the domain of attraction of the dynamical
system (3.1) assume there exists a continuously differentiable f unction V :
D → R such that (3.2), (3.3), and (3.5) are satisfied. Next, let D
β
be the
connected component of {x ∈ D : V (x) ≤ β} containing the origin. Note
that every trajectory starting in D
β
will move to an inner energy surface
and, hence, cannot escape D
β
. Hence, D
β
is an estimate of the domain of
attraction of the nonlinear dynamical system (3.1). Now, to maximize this
estimate of the d omain of attraction we maximize β such that D
β
⊆ D.
Hence, define V
Γ
△
= sup{β > 0 : D
β
⊆ D} so that
D
A
△
= {x ∈ D : V (x) ≤ V
Γ
}, (3.20)
is a subset of the domain of attraction for (3.1) since
˙
V (x) < 0 for all
x ∈ D
A
\ {0} ⊆ D \ {0}.
NonlinearBook10pt November 20, 2007
144 CHAPTER 3
Figure 3.6 Visualization of the radial unbound edness req uirement; α
1
< α
2
< α
3
.
The above discussion raises an interesting question; namely, under
what conditions will the d omain of attraction correspond to the entire state
space R
n
? Of course, this corresponds to the case where the trajectory
s(t, x
0
) of (3.1) approaches the origin as t → ∞ for all x
0
∈ R
n
or,
equivalently, the dynamical system is globally asymptotically stable. It
follows f rom the proof of Theorem 3.1 th at global asymptotic stability w ill
hold if every point x ∈ R
n
is contained in the compact set D
β
for some
β > 0. Clearly, in this case we require D = R
n
and that for every β > 0, D
β
is bounded, that is, for every β > 0 there exists r > 0 such that if x ∈ D
β
,
then x ∈ B
r
(0) or, equivalently, V (x) > β for all x 6∈ B
r
(0). This condition
ensuring that D
β
is bounded for all β > 0 is implied by
V (x) → ∞ as kxk → ∞. (3.21)
A fun ction V (·) satisfying (3.21) is called proper or radially unbounded.
Next, we state the global Lyapunov stability theorem wh ere the
domain of attraction of (3.1) is the entire state s pace.
Theorem 3.2. Consider the nonlinear dynamical system (3.1) and
assume there exists a continuously differentiable function V : R
n
→ R s uch
that
V (0) = 0, (3.22)
V (x) > 0, x ∈ R
n
, x 6= 0, (3.23)
V
′
(x)f(x) < 0, x ∈ R
n
, x 6= 0, (3.24)
V (x) → ∞ as kxk → ∞. (3.25)