Haddad W.M. Nonlinear Dynamical Systems and Control: A Lyapunov-Based Approach
Подождите немного. Документ загружается.

NonlinearBook10pt November 20, 2007
STABILITY THEORY FOR NONLINEAR SYSTEMS 145
Then the zero solution x(t) ≡ 0 to (3.1) is globally asymptotically stable. If,
alternatively, there exist scalars α, β, ε > 0, and p ≥ 1, such that V : R
n
→ R
satisfies
αkxk
p
≤ V (x) ≤ βkxk
p
, x ∈ R
n
(3.26)
V
′
(x)f(x) ≤ −εV (x), x ∈ R
n
, (3.27)
then the zero solution x(t) ≡ 0 to (3.1) is globally exponentially stable.
Proof. Let x(0) ∈ R
n
, and let β
△
= V (x
0
). Now, the radial
unboundedness condition (3.25) implies th at there exists ε > 0 such that
V (x) > β for all x ∈ R
n
such that kxk ≥ ε. Hence, it f ollows from (3.24)
that V (x(t)) ≤ V (x
0
) = β, t ≥ 0, which implies that x(t) ∈ B
ε
(0), t ≥ 0.
Now, the proof follows as in the p roof of Theorem 3.1.
The following example adopted from [178] shows the motivation for
the radial unboundedness condition in ensuring global asymptotic stability.
Example 3.3. Consider the nonlinear d ynamical system
˙x
1
(t) = −
6x
1
(t)
[1 + x
2
1
(t)]
2
+ 2x
2
(t), x
1
(0) = x
10
, t ≥ 0, (3.28)
˙x
2
(t) = −
2[x
1
(t) + x
2
(t)]
[1 + x
2
1
(t)]
2
, x
2
(0) = x
20
. (3.29)
To examine the stability of th is system, consider the Lyapunov function
candidate V (x
1
, x
2
) = x
2
1
/(1 + x
2
1
) + x
2
2
. Note that V (0, 0) = 0 and
V (x
1
, x
2
) > 0, (x
1
, x
2
) ∈ R × R, (x
1
, x
2
) 6= (0, 0); however, V (x
1
, x
2
) is
not radially unbounded. The Lyapunov derivative
˙
V (x
1
, x
2
) is given by
˙
V (x
1
, x
2
) =
2x
1
(1 + x
2
1
) − 2x
3
1
(1 + x
2
1
)
2
˙x
1
+ 2x
2
˙x
2
=
2x
1
(1 + x
2
1
)
2
−
6x
1
(1 + x
2
1
)
2
+ 2x
2
−
4x
2
(x
1
+ x
2
)
(1 + x
2
1
)
2
= −
12x
2
1
(1 + x
2
1
)
4
−
4x
2
2
(1 + x
2
1
)
2
< 0, (x
1
, x
2
) ∈ R × R, (x
1
, x
2
) 6= (0, 0). (3.30)
Clearly, th e Lyapunov derivative is negative definite in all of R
2
,
and hence, the zero solution (x
1
(t), x
2
(t)) ≡ (0, 0) to (3.28) and (3.29)
is asymptotically stable. However, to show that (3.28) and (3.29) is not
globally asymptotically stable, consider the hyperbola x
2
= 2/(x
1
−
√
2) in
NonlinearBook10pt November 20, 2007
146 CHAPTER 3
the x
1
-x
2
plane. Now, on the hyperbola, ˙x
2
/ ˙x
1
is given by
˙x
2
˙x
1
x
2
=
2
x
1
−
√
2
=
−2(x
1
+ x
2
)
−6x
1
+ 2x
2
(1 + x
2
1
)
2
x
2
=
2
x
1
−
√
2
= −
1
2x
2
1
+ 2
√
2x
1
+ 1
,
(3.31)
whereas the slope of the hyperbola is given by
dx
2
dx
1
= −
2
(x
1
−
√
2)
2
= −
1
1
2
x
2
1
−
√
2x
1
+ 1
. (3.32)
Next, for x
1
>
√
2, it follows from (3.31) and (3.32) that
2x
2
1
+ 2
√
2x
1
+ 1 >
1
2
x
2
1
−
√
2x
1
+ 1,
and h en ce,
˙x
2
˙x
1
x
2
=
2
x
1
−
√
2
>
dx
2
dx
1
, (3.33)
for x
1
>
√
2. Furthermore, note that for x
1
>
√
2,
˙x
1
|
x
2
=
2
x
1
−
√
2
= −
6x
1
(1 + x
2
1
)
2
+
4
x
1
−
√
2
=
4 + 6
√
2x
1
+ 2x
2
1
+ 4x
4
1
(1 + x
2
1
)
2
(x
1
−
√
2)
> 0. (3.34)
Since on the hyperbola ˙x
1
> 0 for x
1
>
√
2, it follows that the
trajectories of (3.28) and (3.29) cannot cut the b ranch of the hyperbola
lying in the first quadrant in the x
1
-x
2
plane, and in the direction toward
the x
1
-x
2
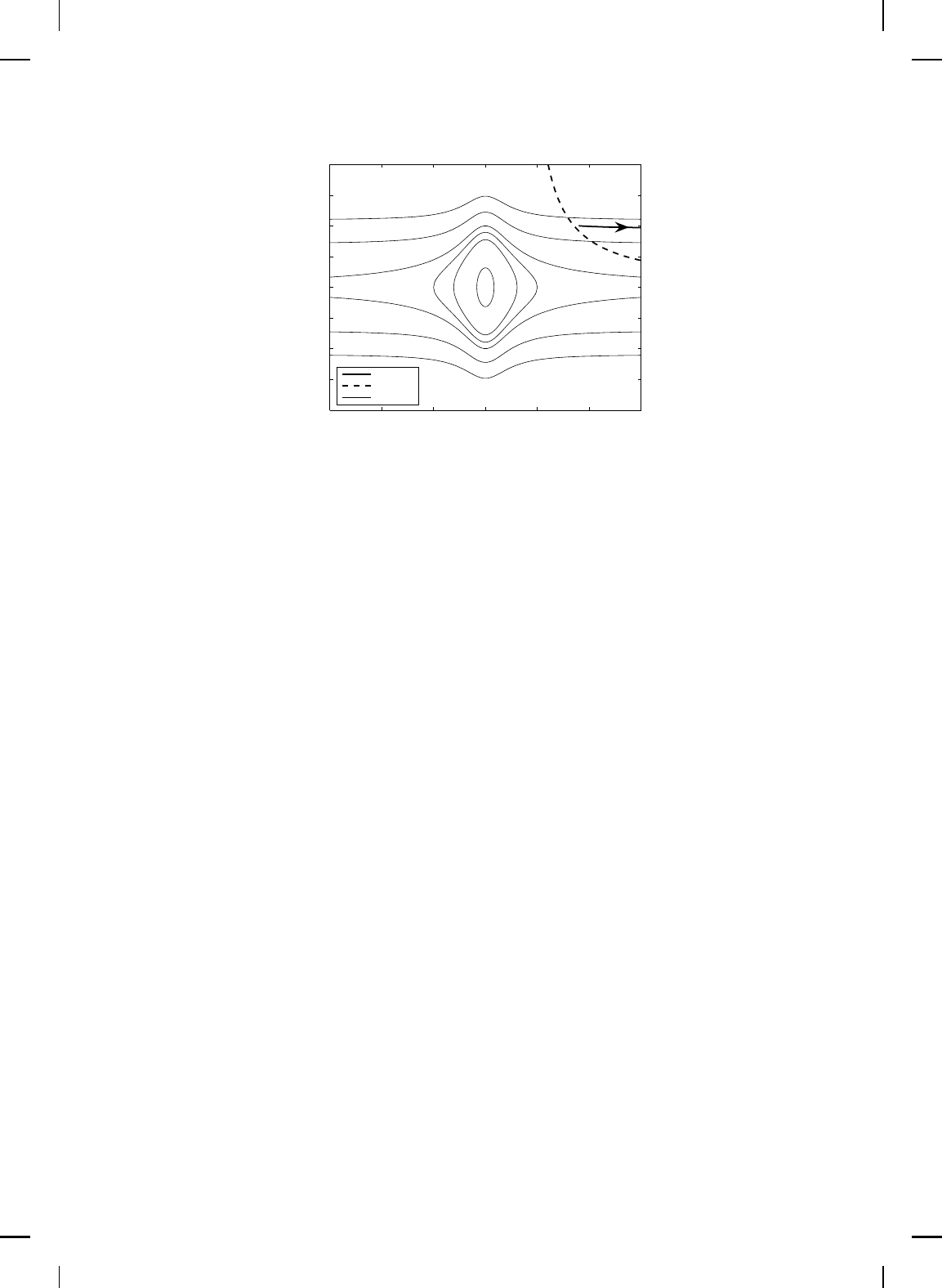
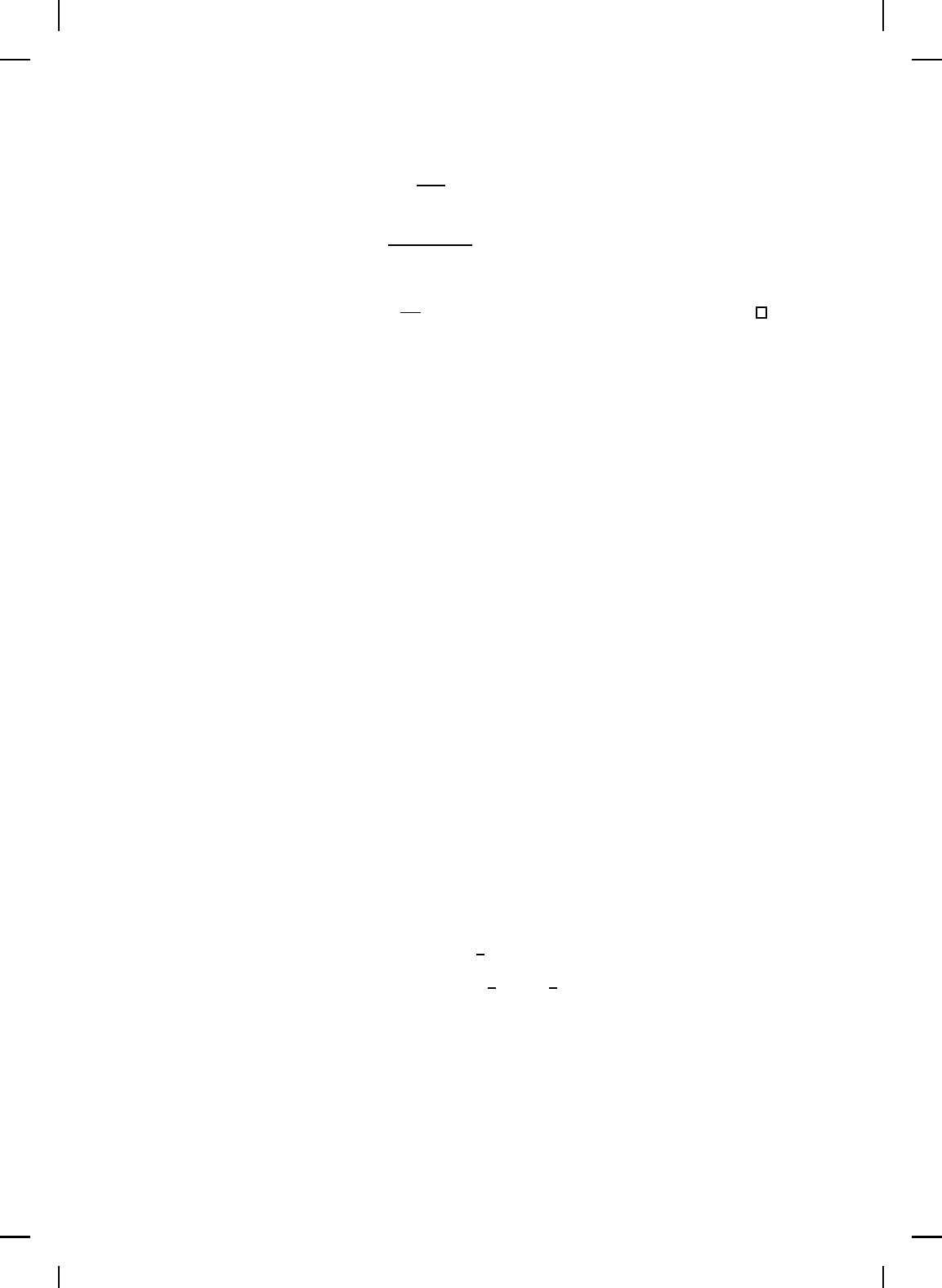
axes (see Figure 3.7). Hence, since trajectories starting to the right
of the hyperbola cannot reach the origin, it follows that the zero solution
(x
1
(t), x
2
(t)) ≡ (0, 0) to (3.28) and (3.29) is not globally asymptotically
stable. △
The radial unboundedness condition (3.25) ensures that the constant
energy surfaces V (x) = α, α > 0, are hypersurfaces, and hence, since the
system trajectories move from one energy surface to an inner energy surface,
the system trajectories cannot d rift away from the system equilibrium.
Example 3.4. Consider the nonlinear d y namical system
˙x
1
(t) = −x
1
(t) + x
3
2
(t), x
1
(0) = x
10
, t ≥ 0, (3.35)
˙x
2
(t) = −x
1
(t) −x
2
(t), x
2
(0) = x
20
. (3.36)
To examine the stability of this system, consider the Lyapunov function
candidate V (x
1
, x
2
) =
1
2
x
2
1
+
1
4
x
4
2
, w hich is positive definite and radially
NonlinearBook10pt November 20, 2007
STABILITY THEORY FOR NONLINEAR SYSTEMS 147
−6 −4 −2 0 2 4 6
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x
1
x
2
trajectory
hyperbola
level sets
Figure 3.7 Level sets and an unbounded trajectory for Example 3.3.
unbounded in R
2
. Now, the Lyapunov derivative is given by
˙
V (x
1
, x
2
) = x
1
˙x
1
+ x
3
2
˙x
2
= −x
2
1
− x
4
2
< 0, (x
1
, x
2
) 6= (0, 0), (3.37)
which implies that the zero solution (x
1
(t), x
2
(t)) ≡ (0, 0) to (3.35) and
(3.36) is globally asymp totically stable. Is this system globally exponentially
stable? △
3.3 Invariant Set Stability Theorems
In this section, we introduce the Barbashin-Krasovskii-LaSalle invariance
principle to relax on e of the cond itions on the Lyapunov f unction V (·) in the
theorems given in Section 3.2. In particular, the strict negative-definiteness
condition on the Lyapunov derivative can be relaxed while ensuring system
asymptotic stability. Specifically, if a continuously differentiable function
defined on a compact invariant set with respect to the nonlinear dynamical
system (3.1) can be constructed whose derivative along the system’s
trajectories is negative semidefinite and no system traj ectories can stay
indefinitely at points where the function’s derivative vanishes, then the
system’s equilibrium point is asymptotically stable. This result follows
from the Barbashin-Krasovskii-LaSalle invariance principle for nonlinear
dynamical systems, which we now state and prove.
Theorem 3.3 (Barbashin-Krasovskii-LaSalle Theorem). Consider the
nonlinear dynamical system (3.1), assume that D
c
⊂ D is a compact
positively invariant set with respect to (3.1), and assume there exists a
continuously differentiable function V : D
c
→ R such that V
′
(x)f(x) ≤
0, x ∈ D
c
. Let R
△
= {x ∈ D
c
: V
′
(x)f(x) = 0} and let M be the largest
invariant set contained in R. If x(0) ∈ D
c
, then x(t) → M as t → ∞.
NonlinearBook10pt November 20, 2007
148 CHAPTER 3
Proof. Let x(t), t ≥ 0, be a solution to (3.1) with x(0) ∈ D
c
. Since
V
′
(x)f(x) ≤ 0, x ∈ D
c
, it follows that
V (x(t)) − V (x(τ)) =
Z
t
τ
V
′
(x(s))f(x(s))ds ≤ 0, t ≥ τ,
and h en ce, V (x(t)) ≤ V (x(τ)), t ≥ τ, which implies that V (x(t)) is a
nonincreasing function of t. Next, since V (·) is continuous on the compact
set D
c
, there exists β ∈ R such that V (x) ≥ β, x ∈ D
c
. Hence,
γ
x
0
△
= lim
t→∞
V (x(t)) exists. Now, for all p ∈ ω(x
0
) there exists an
increasing unbounded sequence {t
n
}
∞
n=0
, with t
0
= 0, such that x(t
n
) → p
as n → ∞. Since V (x), x ∈ D
c
, is continuous, V (p) = V (lim
n→∞
x(t
n
)) =
lim
n→∞
V (x(t
n
)) = γ
x
0
, and hence, V (x) = γ
x
0
on ω(x
0
). Now, since D
c
is compact and positively invariant it follows that x(t), t ≥ 0, is bounded,
and hence, it follows from Theorem 2.41 that ω(x
0
) is a nonempty, compact
invariant set. Hence, it follows that V
′
(x)f(x) = 0 on ω(x
0
) and thus
ω(x
0
) ⊂ M ⊂ R ⊂ D
c
. Finally, since x(t) → ω(x
0
) as t → ∞, it f ollows
that x(t) → M as t → ∞.
The construction of V (·) in Theorem 3.3 can be used to guarantee
the existence of the compact positively invariant s et D
c
. Specifically, if
D
β
= {x ∈ D : V (x) ≤ β}, where β > 0, is bounded and
˙
V (x) ≤ 0,
x ∈ D
β
, then we can always take D
c
= D
β
. As discussed in Section 3.1,
if V (·) is positive definite, then D
β
is bounded for sufficiently small β > 0.
Alternatively, if V (·) is radially unbounded, then D
β
is bounded for every
β > 0 irrespective of whether V (·) is positive definite or not.
Example 3. 5. The Barbashin-Krasovskii-LaSalle invariant set theo-
rem can be used to examine th e stability of limit cycles. To see this, consider
the nonlinear dynamical system
˙x
1
(t) = 4x
2
1
(t)x
2
(t) − g
1
(x
1
(t))[x
2
1
(t) + 2x
2
2
(t) −4], x
1
(0) = x
10
, t ≥ 0,
(3.38)
˙x
2
(t) = −2x
3
1
(t) −g
2
(x
2
(t))[x
2
1
(t) + 2x
2
2
(t) − 4], x
2
(0) = x
20
, (3.39)
where x
1
g
1
(x
1
) > 0, x
1
6= 0, x
2
g
2
(x
2
) > 0, x
2
6= 0, g
1
(0) = 0, and g
2
(0) = 0.
Now, note th at the s et defined by the ellipse E
△
= {(x
1
, x
2
) ∈ R × R :
x
2
1
+ 2x
2
2
− 4 = 0} is invariant since
d
dt
[x
2
1
(t) + 2x
2
2
(t) −4] = −[2x
1
(t)g
1
(x
1
(t)) + 4x
2
(t)g
2
(x
2
(t))]
·[x
2
1
(t) + 2x
2
2
(t) −4]
= 0, t ≥ 0, (3.40)
and hence, if (x
1
(0), x
2
(0)) ∈ E, th en (x
1
(t), x
2
(t)) ∈ E, t ≥ 0. The motion

NonlinearBook10pt November 20, 2007
STABILITY THEORY FOR NONLINEAR SYSTEMS 149
on E is characterized by either of the equations
˙x
1
(t) = 4x
2
1
(t)x
2
(t), (3.41)
˙x
2
(t) = −2x
3
1
(t), (3.42)
which shows that E is a limit cycle for (3.38) and (3.39) where the state
vector moves clockwise.
To examine whether this limit cycle is attractive, define the function
V : R
2
→ R rep resenting a measure of the distance to the limit cycle by
V (x
1
, x
2
) = (x
2
1
+ 2x
2
2
−4)
2
and note that V (0, 0) = 16. Next, let β > 0 and
define
D
c
△
= {(x
1
, x
2
) ∈ R ×R : V (x
1
, x
2
) ≤ β}
= {(x
1
, x
2
) ∈ R ×R : (x
2
1
+ 2x
2
2
− 4)
2
≤ β}. (3.43)
Now, note that
˙
V (x
1
, x
2
) = 2(x
2
1
+ 2x
2
2
− 4)
d
dt
(x
2
1
+ 2x
2
2
− 4)
= −2(x
2
1
+ 2x
2
2
− 4)
2
[2x
1
g
1
(x
1
) + 4x
2
g
2
(x
2
)]
≤ 0, (x
1
, x
2
) ∈ D
c
. (3.44)
Next, defining R
△
= {(x
1
, x
2
) ∈ R × R :
˙
V (x
1
, x
2
) = 0} it follows that
the largest invariant set M ⊆ R is given by
M = {(0, 0)} ∪ {(x
1
, x
2
) ∈ R ×R : x
2
1
+ 2x
2
2
− 4 = 0}. (3.45)
Hence, it follows from Th eorem 3.3 that all system trajectories starting
in D
c
go to (0, 0) or E. However, for β < 16, since V (0, 0) = 16 an d
V (1, 0) = 9 < 16, it follows that (0, 0) 6∈ D
c
and (0, 0) corresponds to a
local maximum of V (x
1
, x
2
). Hence, (0, 0) is unstable. (Can this result
be obtained by Lyapunov’s indirect method? See T heorem 3.19.) Thus, if
(x
1
(0), x
2
(0)) ∈ D
c
, then (x
1
(t), x
2
(t)) → E as t → ∞, establishing that the
limit cycle characterized by E is attractive. △
Next, using Theorem 3.3 we provide a generalization of Theorem 3.1
for local asymptotic s tability of a nonlinear dynamical s y stem.
Corollary 3.1. Consider the nonlinear dynamical system (3.1), assume
that D
c
⊂ D is a compact positively invariant set with respect to (3.1)
such that 0 ∈
◦
D
c
, and assume that there exists a continuously differentiable
function V : D
c
→ R such that V (0) = 0, V (x) > 0, x 6= 0, and V
′
(x)f(x) ≤
0, x ∈ D
c
. Furthermore, assume th at the set R
△
= {x ∈ D
c
: V
′
(x)f(x) = 0}
contains no invariant set other than the set {0}. Then the zero solution
x(t) ≡ 0 to (3.1) is asymptotically stable and D
c
is a su bset of the domain
NonlinearBook10pt November 20, 2007
150 CHAPTER 3
of attraction of (3.1).
Proof. Lyapunov stability of the zero solution x(t) ≡ 0 to (3.1) follows
from Theorem 3.1 since V
′
(x)f(x) ≤ 0, x ∈ D
c
. Now, it follows from
Theorem 3.3 that if x
0
∈ D
c
, then ω(x
0
) ⊆ M, where M denotes the
largest invariant set contained in R, which implies th at M = {0}. Hence,
x(t) → M = {0} as t → ∞, establishing asymptotic stability of the zero
solution x(t) ≡ 0 to (3.1).
Example 3.6. To see the utility of Corollary 3.1, consider the nonlinear
dynamical system d escribing the notion of a simple pendulum given in
Example 3.2. To examine the stability of this system consider the more
natural energy Lyapunov function candidate given by
V (θ,
˙
θ) =
1
2
˙
θ
2
+
g
l
(1 − cos θ), (3.46)
with Lyapunov derivative
˙
V (θ,
˙
θ) =
˙
θ
¨
θ +
g
l
˙
θ sin θ = −
˙
θ
2
≤ 0, (θ,
˙
θ) ∈ R ×R, (3.47)
establishing Lyapun ov stability of the zero solution (θ(t),
˙
θ(t)) ≡ (0, 0).
Next, let β > 0 be such that D
c
△
= {(θ,
˙
θ) : V (θ,
˙
θ) ≤ β} is compact. Note
that D
c
is positively invariant. Now, to show asymptotic stability for this
system let R
△
= {(θ,
˙
θ) ∈ R × R :
˙
V (θ,
˙
θ) = 0} = {(θ,
˙
θ) ∈ R × R :
˙
θ = 0}
and note th at
˙
V (θ,
˙
θ) < 0 everywhere except on the line
˙
θ = 0, where
˙
V (θ,
˙
θ) = 0. Now, let M be the largest invariant set contained in R and note
that (0, 0) ∈ M ⊂ R since (0, 0) is an equilibrium point. Furthermore, note
that for the system to guarantee the condition
˙
V (θ,
˙
θ) = 0, the trajectory of
the system mus t lie on the line
˙
θ = 0. Since
˙
θ(t) ≡ 0 implies
¨
θ(t) ≡ 0 which,
using (3.15), further implies sin θ(t) ≡ 0, it follows that, for θ ∈ (−π, π),
M = {(0, 0)} is the largest invariant set contained in R, and h en ce, by
Corollary 3.1, (θ(t),
˙
θ(t)) → (0, 0) as t → ∞, establishing local asymptotic
stability. △
Example 3.7. Corollary 3.1 can also be used to characterize the
domain of attraction of a nonlinear dynamical system. To see this, consider
the nonlinear dynamical system
˙x
1
(t) = x
1
(t)[x
2
1
(t) + x
2
2
(t) − 1] − x
2
(t), x
1
(0) = x
10
, t ≥ 0, (3.48)
˙x
2
(t) = x
1
(t) + x
2
(t)[x
2
1
(t) + x
2
2
(t) − 1], x
2
(0) = x
20
, (3.49)
with Lyapunov function candidate V (x
1
, x
2
) = x
2
1
+ x
2
2
. Now, the Lyapu nov
derivative is given by
˙
V (x
1
, x
2
) = 2x
1
˙x
1
+ 2x
2
˙x
2
= 2(x
2
1
+ x
2
2
)(x
2
1
+ x
2
2
− 1), (3.50)
which is strictly negative if 0 < x
2
1
+ x
2
2
< 1. Next, define D
β
△
= {(x
1
, x
2
) ∈
R × R : x
2
1
+ x
2
2
≤ β}, where β ∈ (0, 1), and note that R
△
= {(x
1
, x
2
) ∈
NonlinearBook10pt November 20, 2007
STABILITY THEORY FOR NONLINEAR SYSTEMS 151
D
β
:
˙
V (x
1
, x
2
) = 0} = {(0, 0)} = M. Now, it follows from C orollary 3.1
that the zero solution (x
1
(t), x
2
(t)) ≡ (0, 0) to (3.48) and (3.49) is locally
asymptotically stable w ith D
β
being a subs et of the domain of attraction for
every β ∈ (0, 1). Hence, D
c
△
= {(x
1
, x
2
) ∈ R × R : x
2
1
+ x
2
2
< 1} is contained
in the domain of attraction of (3.48) and (3.49). △
In Theorem 3.3 and Corollary 3.1 we explicitly assumed that there
exists a compact invariant set D
c
⊂ D of (3.1). Next, we provide a result
that does not require the explicit assumption of the existence of a compact
invariant D
c
.
Theorem 3.4. Consider the nonlinear dynamical system (3.1) and
assume that there exists a continuously differentiable fu nction V : R
n
→ R
such that
V (0) = 0, (3.51)
V (x) > 0, x ∈ R
n
, x 6= 0, (3.52)
V
′
(x)f(x) ≤ 0, x ∈ R
n
. (3.53)
Let R
△
= {x ∈ R
n
: V
′
(x)f(x) = 0} and let M be the largest invariant set
contained in R. Then all solutions x(t), t ≥ 0, of (3.1) that are bounded
approach M as t → ∞.
Proof. Let x ∈ R
n
be such that trajectory s(t, x), t ≥ 0, of (3.1) is
bounded. Now, with D
c
= O
+
x
, it follows from Theorem 3.3 that s(t, x) →
M as t → ∞.
Next, we present the global invariant set theorem for guaranteeing
global asymptotic stability of a nonlinear dynamical system.
Theorem 3.5. Consider the nonlinear dynamical system (3.1) and
assume there exists a continuously differentiable function V : R
n
→ R s uch
that
V (0) = 0, (3.54)
V (x) > 0, x ∈ R
n
, x 6= 0, (3.55)
V
′
(x)f(x) ≤ 0, x ∈ R
n
, (3.56)
V (x) → ∞ as kxk → ∞. (3.57)
Furth ermore, assume that the set R
△
= {x ∈ R
n
: V
′
(x)f(x) = 0} contains
no invariant set other than the set {0}. Then the zero solution x(t) ≡ 0 to
(3.1) is globally asymp totically stable.
Proof. Since (3.54)–(3.56) h old, it follows from Theorem 3.1 th at
the zero solution x(t) ≡ 0 to (3.1) is Lyapunov stable while the radial
NonlinearBook10pt November 20, 2007
152 CHAPTER 3
unboundedness condition (3.57) implies that all solutions to (3.1) are
bounded. Now, Theorem 3.4 implies that x(t) → M as t → ∞. However,
since R contains no invariant set other than the set {0}, the set M is {0},
and h en ce, global asymptotic stability is immediate.
Theorems 3.3, 3.4, and 3.5 are known as invariant set theorems.
Since for local asymptotic s tability V (x) is defined on a compact positively
invariant set D
c
, D
c
provides an estimate of the domain of attraction for the
nonlinear dynamical system (3.1) which is not necessarily of the form given
by (3.20). Finally, un like Lyapunov’s theorem, the Barbashin-Krasovskii-
LaSalle invariant set theorem relaxes the strict negative-definiteness condi-
tion on the Lyapunov derivative
˙
V (x), x ∈ D
c
, for both lo cal and global
asymptotic stability.
3.4 Construction of Lyapunov Functions
As shown in Sections 3.2 and 3.3 the key requirement in applying Lyapunov’s
direct method and the Barbashin-Krasovskii-LaSalle invariance principle
for examining the stability of nonlinear systems is the construction of a
Lyapunov function. For certain systems, especially on es that have physical
energy interpretations, constructing a sys tem Lyapunov function can be
straightforward. In other cases, however, that can be a difficult task. In this
section, we pr esent four systematic approaches for constructing Lyapunov
functions; namely, th e variable gradient, Krasovskii’s, Zubov’s, and the
Energy-Casimir methods.
The variable gradient method assumes a certain form for the gradient
of an unknown Lyapunov function and then by integrating the assumed
gradient one can often arrive at a Lyapunov function. To see this, let V :
D → R be a continuously differentiable function and let g(x) =
∂V
∂x
T
.
Now, the derivative of V (x) along the trajectories of (3.1) is given by
˙
V (x) =
n
X
i=1
∂V
∂x
i
˙x
i
=
n
X
i=1
∂V
∂x
i
f
i
(x)
=
h
∂V
∂x
1
,
∂V
∂x
2
, . . . ,
∂V
∂x
n
i
f
1
(x)
f
2
(x)
.
.
.
f
n
(x)
=
∂V
∂x
f(x)
NonlinearBook10pt November 20, 2007
STABILITY THEORY FOR NONLINEAR SYSTEMS 153
= g
T
(x)f(x). (3.58)
Next, construct g(x) such that g(x) is a gradient for a positive-definite
function and
˙
V (x) = g
T
(x)f(x) < 0, x ∈ D, x 6= 0. Specifically, it follows
from (3.58) that the fu nction V (x) can be computed from the line integral
V (x) =
Z
x
0
g
T
(s)ds =
Z
x
0
n
X
i=1
g
i
(s)ds
i
. (3.59)
Recall that the line integral of a gradient vector g : R
n
→ R
n
is path
independ ent [12, Theorem 10-37], and hence, the integration in (3.59) can
be taken along any path joining the origin to x ∈ R
n
. Choosing a path made
up of line segments parallel to the coordinate axes, (3.59) becomes
V (x) =
Z
x
1
0
g
1
(s
1
, 0, . . . , 0)ds
1
+
Z
x
2
0
g
2
(x
1
, s
2
, . . . , 0)ds
2
+ ··· +
Z
x
n
0
g
n
(x
1
, x
2
, . . . , x
n−1
, s
n
)ds
n
. (3.60)
Alternatively, us ing the transform ation s = σx, where σ ∈ [0, 1], (3.59) can
be rewritten as
V (x) =
Z
1
0
g
T
(σx)xdσ =
Z
1
0
n
X
i=1
g
i
(σx)x
i
dσ. (3.61)
The following result shows that g(x) is a gradient of a real-valued
function V : R
n
→ R if and only if th e Jacobian matrix ∂g/∂x is symmetric.
Proposition 3.1. The function g : R
n
→ R
n
is the gradient vector of
a scalar-valued function V : R
n
→ R if and only if
∂g
i
∂x
j
=
∂g
j
∂x
i
, i, j = 1, . . . , n. (3.62)
Proof. If g
T
(x) =
∂V
∂x
, then g
i
(x) =
∂V
∂x
i
. Since
∂g
i
∂x
j
=
∂
2
V
∂x
j
∂x
i
=
∂g
j
∂x
i
,
i, j = 1, . . . , n, necessity is immediate. To show sufficiency, assume
∂g
i
∂x
j
=
∂g
j
∂x
i
, i, j = 1, . . . , n, and define V (x) as the line integral
V (x) =
Z
1
0
g
T
(σx)xdσ =
Z
1
0
n
X
j=1
g
j
(σx)x
j
dσ. (3.63)
Hence,
∂V
∂x
i
=
Z
1
0
n
X
j=1
∂g
j
∂x
i
(σx)x
j
σdσ +
Z
1
0
g
i
(σx)dσ
NonlinearBook10pt November 20, 2007
154 CHAPTER 3
=
Z
1
0
n
X
j=1
∂g
i
∂x
j
(σx)x
j
σdσ +
Z
1
0
g
i
(σx)dσ
=
Z
1
0
d(σg
i
(σx))
dσ
dσ
= g
i
(x), i = 1, . . . , n, (3.64)
which implies that g
T
(x) =
∂V
∂x
.
Choosing g(x) such that g
T
(x)f(x) < 0, x ∈ D, x 6= 0, it f ollows from
Proposition 3.1 that V (x) can be computed from the line integral
V (x) =
Z
1
0
g
T
(σx)xdσ =
Z
1
0
n
X
j=1
g
j
(σx)x
j
dσ. (3.65)
Once arriving at V (x), x ∈ D, it is important to check whether V (·) is
positive definite.
Example 3.8. Consider the nonlinear d y namical system
˙x
1
(t) = x
2
(t), x
1
(0) = x
10
, t ≥ 0, (3.66)
˙x
2
(t) = −[x
1
(t) + x
2
(t)] − sin(x
1
(t) + x
2
(t)), x
2
(0) = x
20
. (3.67)
To construct a Lyapunov function for (3.66) an d (3.67) let g(x) = [a
11
x
1
+
a
12
x
2
, a
21
x
1
+ a
22
x
2
]
T
and let a
12
= a
21
= β so that the symmetry
requirement (3.62) holds. Now,
˙
V (x) = g
T
(x)f(x)
= (a
11
x
1
+ βx
2
)x
2
−(βx
1
+ a
22
x
2
)[(x
1
+ x
2
) + sin(x
1
+ x
2
)]. (3.68)
Taking a
11
= 2β, a
22
= β, and β > 0 it follows that
˙
V (x) = −βx
2
1
− β(x
1
+ x
2
) sin(x
1
+ x
2
) < 0, (x
1
, x
2
) ∈ D, (3.69)
where D
△
= {(x
1
, x
2
) : |x
1
+ x
2
| < π}. Hence,
V (x) =
Z
1
0
[g
1
(σx
1
, σx
2
)x
1
+ g
2
(σx
1
, σx
2
)x
2
]dσ
=
Z
1
0
β[2x
2
1
+ 2x
1
x
2
+ x
2
2
]σdσ
= βx
2
1
+ βx
1
x
2
+
1
2
βx
2
2
. (3.70)
Note that V (0, 0) = 0 and V (x
1
, x
2
) =
1
2
βx
2
1
+
1
2
β(x
1
+ x
2
)
2
> 0, (x
1
, x
2
) ∈
R ×R, (x
1
, x
2
) 6= (0, 0), and hence, V (x), x ∈ D, is a Lyapunov function for
(3.66) and (3.67). △
Next, we present Krasovskii’s method for constructing a Lyapunov
function for a given nonlinear system. First, however, the following