Haddad W.M. Nonlinear Dynamical Systems and Control: A Lyapunov-Based Approach
Подождите немного. Документ загружается.

NonlinearBook10pt November 20, 2007
DYNAMICAL SYSTEMS AND DIFFERENTIAL EQUATIONS 105
Proposition 2.36. Consider the nonlinear d ynamical system G given
by (2.224). Then x ∈ D is a periodic point of G if and only if there exists
T 6= 0 such that x = s(T, x).
Proof. Necessity is immediate. To show sufficiency let t ∈ R and note
that s(t, x) = s(t, s(T, x)) = s(t + T, x), w hich proves the result.
The next theorem establishes an important relationship between
periodic points, ω-limit sets, and positive orbits.
Theorem 2.43. Consider th e nonlinear dynamical system G given by
(2.224). Then x ∈ D is a periodic point of G if and only if O
+
x
= ω(x).
Proof. Let O
+
x
= ω(x). In this case, x ∈ ω(x) and since ω(x) is
invariant if follows that O
+
x
= ω(x) = O
x
. Hence, s(τ, x) ∈ O
+
x
for each
τ < 0, an d hence, there exists µ ≥ 0 such that s(τ, x) = s(µ, x). Now, it
follows from the group axiom that s(t, x) = s(t+µ−τ, x) for all t ∈ R, which
establishes that x is periodic with period T = µ − τ > 0. The converse is
immediate.
For finite-dimensional dynamical systems wherein D ⊆ R
n
, it can be
shown that x ∈ D is a periodic point of G if and only if ω(x) = α(x) = O
x
.
(See Problem 2.127.)
It is important to distinguish between trivial periodic orbits and
nontrivial periodic orbits or limit cycles. To see the distinction consider
the dynamical equations for the simple h armonic oscillator given by
˙x
1
(t) = x
2
(t), x
1
(0) = x
10
, t ≥ 0, (2.225)
˙x
2
(t) = −x
1
(t), x
1
(0) = x
20
, (2.226)
where the solution is characterized by
x
1
(t) = A cos(t −θ
0
), x
2
(t) = −A sin(t −θ
0
), (2.227)
where A =
p
x
2
10
+ x
2
20
and θ
0
= tan
−1
(
x
20
x
10
). Note th at the solution to
(2.225) and (2.226) is periodic for all initial conditions x
10
, x
20
∈ R. That
is, given any initial condition in the plane x
1
-x
2
, one can find a periodic
solution passing through this point. This is called a trivial periodic orbit.
This is in contrast to a nontrivial periodic orbit or limit cycle wherein a
dynamical system possesses an isolated periodic orbit, that is, there exists a
neighborhood of the periodic orbit that does not contain any other periodic
solution. To see this, cons ider once again (2.220) and (2.221) given in
Example 2.38. In particular, using separation of variables the solution to
NonlinearBook10pt November 20, 2007
106 CHAPTER 2
(2.220) and (2.221) is given by
r(t) =
1 +
1
A
2
− 1
e
−2t
−1/2
, (2.228)
θ(t) = t + θ
0
. (2.229)
Clearly, (2.228) shows that (2.220) and (2.221) has only one nontrivial
periodic solution corresponding to r = 1, that is, x
2
10
+ x
2
20
= 1. In light
of the above observations we have the following definition for a nontrivial
periodic orbit or limit cycle.
Definition 2. 54. Consider the nonlinear dynamical system (2.224). A
limit cycle of (2.224) is a closed curve
4
Γ ⊂ R
n
such that Γ is the positive
limit set of the positive orbit O
+
x
of (2.224) or th e negative limit set of the
negative orbit O
−
x
of (2.224) for x 6∈ Γ.
Note that it follows from Definition 2.54 that a limit cycle is compact
and invariant. Furthermore, if a nontrivial periodic solution Γ is isolated
such that it is the positive limit set of the positive orbit O
+
x
of (2.224) or
the negative limit set of the negative orbit O
−
x
of (2.224) for x 6∈ Γ, then G
is a limit cycle.
Next, we present a key result due to Ivar Bendixson [39] that
guarantees the absence of limit cycles for planar systems. For this result,
we consider second-order nonlinear dynamical systems of the form
˙x
1
(t) = f
1
(x
1
(t), x
2
(t)), x
1
(0) = x
10
, t ∈ R, (2.230)
˙x
2
(t) = f
2
(x
1
(t), x
2
(t)), x
2
(0) = x
20
, (2.231)
where f
1
(x
1
, x
2
) and f
2
(x
1
, x
2
) are continuously differentiable. Furthermore,
define the divergence operator
∇f(x)
△
=
∂f
1
∂x
1
(x
1
, x
2
) +
∂f
2
∂x
2
(x
1
, x
2
). (2.232)
The following definition is required for the statement of Bendixson’s
theorem.
Definition 2.55. A s ubset D ⊆ R
2
is simply connected if there exist
y ∈ D and a continuous function g : [0, 1] × D → D su ch that g(0, x) = x
and g(1, x) = y for all x ∈ D.
Theorem 2.44 (Bendixson’s Theorem). Consider the second-order
nonlinear dynamical system (2.230) and (2.231) with vector field f : D →
R
2
, where D is a simply connected region in R
2
such that there are no
4
Γ is a closed curve contained in R
n
if there exists a continuous mapping γ : [0, 1] → R
n
such
that γ(0) = γ(1), Γ = {γ(σ) : σ ∈ [0, 1]}, and Γ 6= {γ(0)}.
NonlinearBook10pt November 20, 2007
DYNAMICAL SYSTEMS AND DIFFERENTIAL EQUATIONS 107
equilibrium points of (2.230) and (2.231) in D. If there exists x ∈ D such
that ∇f(x) 6= 0 and ∇f(x) does not change sign in D, then (2.230) and
(2.231) has no periodic orbits lying entirely in D.
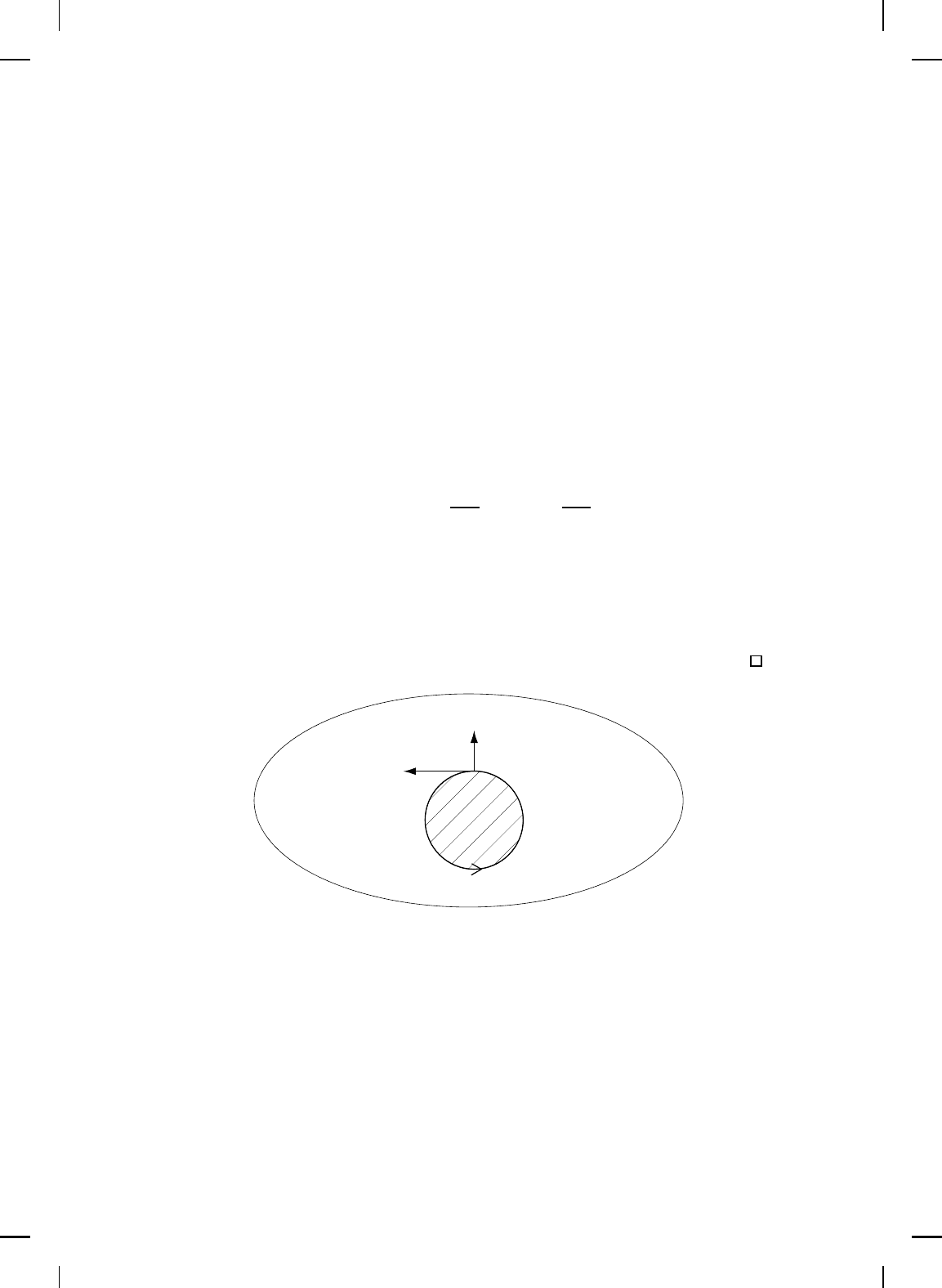
Proof. Suppose, ad absurdum, that Γ = {x ∈ D : x = x(t), 0 ≤ t ≤ T }
is a closed periodic orbit lying entirely in D. Then, for each x = (x
1
, x
2
) ∈ Γ,
f(x) is tangent to Γ, that is, f(x)·n(x) = 0 for all x ∈ Γ, where n(x) denotes
the outward normal vector to Γ at x (see Figure 2.7). Hence, it follows from
Green’s theorem that
I
Γ
f(x) ·n(x)dΓ =
Z Z
S
∇f(x)dS = 0, (2.233)
or, equivalently,
I
Γ
(f
2
(x
1
, x
2
)dx
1
− f
1
(x
1
, x
2
)dx
2
)
=
Z Z
S
∂f
1
∂x
1
(x
1
, x
2
) +
∂f
2
∂x
2
(x
1
, x
2
)
dx
1
dx
2
= 0, (2.234)
where S is the area enclosed by Γ. Now, if there exists x ∈ D such that
∇f(x) 6= 0 and ∇f (x) does not change sign in S, then it follows from
the continuity of the divergence operator ∇ f (x) in D that (2.233) is either
positive or negative, which leads to a contradiction. Hence, D contains no
periodic solutions of (2.230) and (2.231).
D
S
n(x)
f(x)
Γ
Figure 2.7 Visualization of sets and vector field used in the proof of Theorem 2.30.
Example 2.39. Consider the second-order nonlinear dynamical system
¨x(t) + α ˙x(t) + g(x(t)) = 0, x(0) = x
0
, ˙x(0) = ˙x
0
, t ≥ 0, (2.235)
where α 6= 0 and g : R → R is continuous and satisfies g(0) = 0. Note that
with x
1
= x and x
2
= ˙x, (2.235) can be equivalently written as
˙x
1
(t) = x
2
(t), x
1
(0) = x
0
, t ≥ 0, (2.236)
NonlinearBook10pt November 20, 2007
108 CHAPTER 2
˙x
2
(t) = −g(x
1
(t)) −αx
2
(t), x
2
(0) = ˙x
0
. (2.237)
Now, computing ∇f(x
1
, x
2
) yields
∇f(x
1
, x
2
) =
∂f
1
∂x
1
(x
1
, x
2
) +
∂f
2
∂x
2
(x
1
, x
2
) = −α 6= 0, (x
1
, x
2
) ∈ R ×R.
(2.238)
Hence, it follows from Bendixson’s theorem that (2.235) has no limit cycles
in R
2
. It is interesting to note that for the special case where g(x) = −x+x
3
and α > 0, (2.235) is known as Duffing’s equation. △
Example 2.40. Consider the van der Pol oscillator given by
¨x(t)−ε[1−x
2
(t)] ˙x(t)+ x(t) = 0, x(0) = x
0
, ˙x(0) = ˙x
0
, t ≥ 0, (2.239)
where ε > 0. Now, with x
1
= x and x
2
= ˙x, (2.239) can be equivalently
written as
˙x
1
(t) = x
2
(t), x
1
(0) = x
0
, t ≥ 0, (2.240)
˙x
2
(t) = −x
1
(t) + ε[1 −x
2
1
(t)]x
2
(t), x
2
(0) = ˙x
0
. (2.241)
Computing ∇f(x
1
, x
2
) yields
∇f(x
1
, x
2
) =
∂f
1
∂x
1
(x
1
, x
2
) +
∂f
2
∂x
2
(x
1
, x
2
) = ε(1 −x
2
1
). (2.242)
Hence, it follows from Bendixson’s theorem th at if the van der Pol oscillator
were to possess a periodic solution it would have to intersect {(x
1
, x
2
) : x
1
=
1} or {(x
1
, x
2
) : x
1
= −1} or both sets. △
Example 2.41. Consider the linear dynamical system
˙x(t) = Ax(t), x(0) = x
0
, t ≥ 0, (2.243)
where x(t) ∈ R
2
, t ≥ 0, and A ∈ R
2×2
. From linear sys tem theory it
follows that a necessary and sufficient condition f or the existence of periodic
solutions to (2.243) is Re λ = 0 and Im λ 6= 0, where λ ∈ spec(A). Recall
that the eigenvalues of A for a second-order linear system are given by
det(λI
2
−A) = λ
2
− tr Aλ + det A = 0. (2.244)
Hence, (2.243) possesses periodic solutions if and only if tr A = 0 and
det A > 0. A contrapositive statement to the above yields that the absence
of period ic solutions will be guaranteed if and only if tr A 6= 0 or det A ≤ 0.
Using Bendixson’s theorem it follows th at ∇f (x) = tr A, x ∈ R
2
. Requiring
tr A 6= 0 thus guarantees the absence of periodic solutions to second-order
linear systems. △
A more general criterion for ruling out closed orbits in a simply
connected region of R
2
is due to Dulac.
NonlinearBook10pt November 20, 2007
DYNAMICAL SYSTEMS AND DIFFERENTIAL EQUATIONS 109
Theorem 2.45 (Dulac’s Theorem). Consider the second-order non-
linear dynamical system (2.230) and (2.231) with vector field f : D →
R
2
, where D is a simply connected region in R
2
such that there are no
equilibrium points of (2.230) and (2.231) in D. If there exists x ∈ D and a
continuously differentiable function g : D → R such that ∇(g(x)f(x)) 6= 0
and ∇(g(x)f(x)) does not change sign in D, th en (2.230) and (2.231) has
no closed orbits lying entirely in D.
Proof. The proof of this result is also based on Green’s theorem and
is virtually identical to the proof of Theorem 2.44.
Example 2.42. Consider the second-order nonlinear dynamical system
˙x
1
(t) = x
1
(t)[2 − x
1
(t) −x
2
(t)], x
1
(0) = x
10
, t ≥ 0, (2.245)
˙x
2
(t) = x
2
(t)[4x
1
(t) −x
2
1
(t) −3], x
2
(0) = x
20
. (2.246)
To show that (2.245) and (2.246) has no closed orb its in the positive
orthant R
2
+
, consider the Dulac function g(x
1
, x
2
) = 1/x
1
x
2
. Computing
∇(g(x
1
, x
2
)f(x
1
, x
2
)) yields
∇(g(x
1
, x
2
)f(x
1
, x
2
)) =
∂
∂x
1
(g(x
1
, x
2
)f
1
(x
1
, x
2
)) +
∂
∂x
2
(g(x
1
, x
2
)f
2
(x
1
, x
2
))
=
∂
∂x
1
2 − x
1
− x
2
x
2
+
∂
∂x
2
4x
1
− x
2
1
− 3
x
1
= −1/x
2
< 0, x
1
> 0, x
2
> 0. (2.247)
Since {(x
1
, x
2
) ∈ R × R : x
1
> 0 and x
2
> 0} is simply connected in R
2
and g(·) is continuously differentiable it follows from Dulac’s theorem that
(2.245) and (2.246) has no closed orbits in R
2
+
. △
The next theorem is due to Henri Poincar´e [358–360] and Ivar
Bendixson [39] and gives conditions for the existence of periodic orbits for
planar systems.
Theorem 2.46 (Poincar´e-Bendixson Theorem). Consider the second-
order nonlinear dynamical system (2.230) and (2.231). Let O
+
x
0
be a positive
orbit of (2.230) and (2.231) with positive limit set ω(x
0
). If O
+
x
0
is contained
in a compact subset M of D ⊂ R
2
and ω(x
0
) contains no equilibria of (2.230)
and (2.231), then ω(x
0
) is a periodic orbit of (2.230) and (2.231).
An analogous result is valid for negative orbits O
−
x
with negative limit
set α(x
0
). The proof of the Poincar´e-Bendixson theorem is based on a series
of technical lemmas from algebraic topology involving positive limit sets for
two-dimensional systems and will not be given here. The interested r eader
is referred to [349, 454] for the proof. Nevertheless, the result itself is quite
NonlinearBook10pt November 20, 2007
110 CHAPTER 2
intuitive. In particular, the theorem states that if a compact s et M ⊂ R
2
can
be constructed that does not contain any equilibrium points of (2.230) and
(2.231) and all limit points of (2.230) and (2.231) are contained in M, th en
M must contain at least one period ic orbit. Of course, it is necessary to find
such a region M. One way to do this is to construct M such that M does
not contain any equilibria of (2.230) and (2.231) and is positively invariant.
In this case, O
+
x
⊆ M for x ∈ M and since M is compact it contains all
its limit points, and hence, ω(x
0
) ⊆ M for x
0
∈ M. Hence, every compact,
nonempty positively invariant set M contains either an equilibrium point
or a periodic orbit. This result is stated as a theorem below.
Theorem 2.47. Consider the second-order n on linear dynamical sys-
tem (2.230) and (2.231). Let M be a compact, positively invariant set with
respect to (2.230) and (2.231). Then M contains an equilibrium point or a
periodic orbit.
Proof. If x ∈ M, then ω(x) is a nonempty subset of M, that is,
ω(x) ⊂ M. The result now f ollows as a direct consequence of th e Poincar´e-
Bendixson theorem.
An identical r esult is true for compact, negatively invariant sets.
Example 2.43. To illustrate the Poincar´e-Bendixson theorem we
consider once again the simple harmonic oscillator given by (2.225) and
(2.226). Now, letting V (x
1
, x
2
) = x
2
1
+ x
2
2
it follows that
˙
V (x
1
, x
2
) =
2x
1
˙x
1
+ 2x
2
˙x
2
= 0. Hence, the system trajectories of (2.225) and (2.226)
cannot cross the α-level set of V , that is, V
−1
(α) = {(x
1
, x
2
) ∈ R
2
:
V (x
1
, x
2
) = α}, for every α > 0. Now, define the [α, β]-sublevel set
M
△
= V
−1
([α, β]) = {(x
1
, x
2
) ∈ R
2
: α ≤ V (x) ≤ β}, where β > α > 0.
Note that M is compact and, since
˙
V (x
1
, x
2
) = 0, positively invariant.
Hence, since M contains no equilibrium points it follows from the Poincar´e-
Bendixson theorem that M contains a periodic orbit. △
Example 2.44. Once again, consider the nonlinear dynamical system
(2.220) and (2.221) given in Example 2.38. Letting V (x
1
, x
2
) = x
2
1
+ x
2
2
it
follows that
˙
V (x
1
, x
2
) = 2x
1
˙x
1
+ 2x
2
˙x
2
= −2x
1
x
2
+ 2x
2
1
(1 − x
2
1
− x
2
2
) + 2x
1
x
2
+ 2x
2
2
(1 − x
2
1
− x
2
2
)
= 2V (x
1
, x
2
)[1 − V (x
1
, x
2
)]. (2.248)
Note that
˙
V (x
1
, x
2
) > 0 for V (x
1
, x
2
) < 1 and
˙
V (x
1
, x
2
) < 0 for V (x
1
, x
2
) >
1. Hence, on the α-level set V
−1
(α), where 0 < α < 1, all the system
trajectories of (2.220) and (2.221) are moving out toward the circle x
2
1
+
x
2
2
= 1. Alternatively, on the β-level set V
−1
(β) for β > 1, all system

NonlinearBook10pt November 20, 2007
DYNAMICAL SYSTEMS AND DIFFERENTIAL EQUATIONS 111
trajectories of (2.220) and (2.221) are moving in toward the circle x
2
1
+x
2
2
= 1.
Hence, M = {(x
1
, x
2
) ∈ R
2
: α ≤ V (x) ≤ β} is positively invariant.
Since M is compact and does not contain any equilibrium points, it follows
from the Poincar´e-Bendixson theorem that M contains a periodic orbit.
Furth ermore, since, for every 0 < α < 1 and β > 1, M contains a periodic
orbit it follows that C = {(x
1
, x
2
) ∈ R
2
: x
2
1
+ x
2
2
= 1} contains a periodic
orbit. △
2.14 Problems
Problem 2. 1. Let A ∈ R
n×n
be such that det A 6= 0. Show that there
exists ε > 0 such that kAxk ≥ εkxk, x ∈ R
n
, where k·k is a vector norm on
R
n
.
Problem 2.2. Let p ∈ [1, ∞], ¯p = p/(p − 1), and let A ∈ R
m×n
. Show
that:
i) kAk
2,2
= σ
max
(A).
ii) kAk
p,1
= max
i=1,...,n
kcol
i
(A)k
p
.
iii) kAk
∞,p
= max
i=1,...,m
krow
i
(A)k
¯p
.
Problem 2.3. Using the results of Problem 2.2 show that for A ∈
R
m×n
the f ollowing hold:
i) kAk
1,1
= max
i=1,...,n
kcol
i
(A)k
1
.
ii) kAk
∞,∞
= max
i=1,...,m
krow
i
(A)k
1
.
iii) kAk
∞,1
= max
1,...,m
kAk
∞
.
iv) kAk
2,1
= d
1/2
max
(A
T
A).
v) kAk
∞,2
= d
1/2
max
(AA
T
).
In iv) and v) d
max
(X)
△
= max
i=1,...,n
X
(i,i)
for X ∈ R
n×n
.
Problem 2.4 (Pythagorean Theorem). Let x, y ∈ R
n
. Show that if
x
T
y = 0, then kx + yk
2
2
= kxk
2
2
+ kyk
2
2
.
Problem 2.5. Show that Axiom iv) of Definition 2.6 holds as an
equality if and only if x, y ∈ R
n
are linearly dependent.

NonlinearBook10pt November 20, 2007
112 CHAPTER 2
Problem 2.6. Show that the Euclidean norm satisfies Axioms i)–iv)
of Definition 2.6.
Problem 2.7. Show that equality holds in (2.18) if and only if |x
T
y| =
|x|
T
|y| and
|x| ◦|y| = kyk
∞
|x|, p = 1,
kyk
1/p
q
|x|
{1/q}
= kxk
1/q
p
|y|
{1/p}
, 1 < p < ∞,
|x| ◦|y| = kxk
∞
|y|, p = ∞,
where |z| ∈ R
n
is a vector whose components are the absolute values of
z ∈ R
n
, ◦ denotes the Hadamard product (i.e., component-by-component
product), and z
{α}
△
= [z
α
1
, . . . , z
α
n
]
T
.
Problem 2.8. Let S
△
= {x ∈ R
2
: −1 ≤ x
1
< 1, −1 ≤ x
2
< 1}. Obtain
the closure, interior, and boundary of S. Is S open? Is S closed?
Problem 2. 9. Show that the union of a finite number of bounded sets
is bounded.
Problem 2.10. Let S ⊆ R
n
. Show that x ∈ S if and only if B
ε
(x)∩S 6=
Ø for every ε > 0.
Problem 2.11. Show that th e sequ en ce {x
n
}
∞
n=1
, where x
n
= (1 +
1/n)
n
, is a convergent sequence.
Problem 2.12. Let {x
n
}
∞
n=1
⊂ R. For i) x
n
= (−1)
n
(1 + 1/n), ii)
x
n
= (−1)
n
, iii) x
n
= (−1)
n
n, and iv) x
n
= n
2
sin
2
(
nπ
2
), compute the limit
inferior and limit superior of x
n
.
Problem 2.13. Consider the sequence of functions {f
n
}
∞
n=0
, where f
n
:
R → R is given by f
n
(x) = 1/(1 + x
2n
). Sh ow that the sequence {f
n
}
∞
n=0
exhibits point wise convergence on R.
Problem 2.14. Consider the sequence of functions {f
n
}
∞
n=1
, wh ere
f
n
(x) = ln(1 + x) = x −
1
2
x
2
+
1
3
x
3
− ··· +
(−1)
n−1
n
x
n
+ ···. Show that
this sequence converges f or |x| < 1 and diverges for |x| > 1.
Problem 2.15. Consider the sequence of functions {f
n
}
∞
n=0
, where f
n
:
[0, 1] → R is given by f
n
(x) =
P
∞
n=0
1
n!
(x
2
)
n
. Show that the sequence
{f
n
}
∞
n=1
converges uniformly to f (x) = e
x
2
.
Problem 2.16. Consider the sequence of functions {f
n
}
∞
n=1
, where f
n
:
[0, 1] → R is given by f
n
(x) = n
2
x(1 − x)
n
. Show that even though the

NonlinearBook10pt November 20, 2007
DYNAMICAL SYSTEMS AND DIFFERENTIAL EQUATIONS 113
sequence {f
n
}
∞
n=1
converges,
lim
n→∞
Z
1
0
f
n
(x)dx 6=
Z
1
0
lim
n→∞
f
n
(x)dx.
Problem 2.17. Construct an example of a convergent sequence of
differentiable functions {f
n
(x)}
∞
n=1
such that, for all x ∈ R, lim
n→∞
f
′
n
(x)
does n ot exist.
Problem 2.18. Let {x
n
}
∞
n=0
⊂ R be a scalar sequence. Show that:
i) inf x
n
≤ lim inf
n→∞
x
n
≤ lim su p
n→∞
x
n
≤ sup x
n
.
ii) {x
n
}
∞
n=0
converges if and only if lim inf
n→∞
x
n
= lim sup
n→∞
x
n
=
lim
n→∞
x
n
.
iii) If lim sup
n→∞
x
n
(respectively, lim inf
n→∞
x
n
) is finite, then show that
lim sup
n→∞
x
n
(respectively, lim inf
n→∞
x
n
) is the largest (respec-
tively, smallest) limit point of {x
n
}
∞
n=0
.
Problem 2.19. Explain why i) of T heorem 2.6 may not be true for
infinite intersections.
Problem 2.20. Let f : R → R and g : R → R be given by f(x) = x−1
and g(x) = sin x. Find the composite maps f ◦g and g◦f. Is the composition
of fun ctions commutative?
Problem 2. 21. Let X ⊆ R and Y ⊆ R, and let f : X → Y be given by
f(x) = sin x. What is the inverse image of Y under f if i) X = Y = R and
ii) X = [−π/2, π/2] and Y = R.
Problem 2.22. Let A ∈ R
n×n
and define the map f : R
n×n
→ R
by f(A) = det A. Show that f is s urjective. Is f bijective? What is
f
−1
(R \ {0})?
Problem 2.23. Let f : R → R be given by f (x) = x
2
− 1. Find the
image of X under f, where X = [−1, 2] and X = R. Is f surjective, injective,
or bijective?
Problem 2.24. Let f : X → Y and let U ⊆ X be an open set. Prove
or refute that f(U) is open in Y.
Problem 2.25. Let X ⊆ R
n
and Y ⊆ R
n
, and let f : X → Y. Show
that f is injective if and only if f (Q) ∩ f(X \ Q) = Ø for all Q ⊆ X.
Problem 2.26. Let X and Y be sets, let A, A
1
, and A
2
be s ubsets of

NonlinearBook10pt November 20, 2007
114 CHAPTER 2
X, and let B be a subset of Y. Show that the following statements hold:
i) f (A
1
∩ A
2
) ⊆ f(A
1
) ∩f(A
2
).
ii) f
−1
(f(A)) ⊇ A.
iii) f(f
−1
(B)) ⊆ B.
iv) f(A
1
∩ A
2
) = f(A
1
) ∩f(A
2
) if and only if f is injective.
v) f
−1
(f(A)) = A if and only if f is inj ective.
vi) f(f
−1
(B)) = B if and only if f is surjective.
Problem 2.27. Prove or refute that the union of convex sets is convex.
Problem 2.28. Let C ⊂ R
n
and Q ⊂ R
n
be convex sets. Show that:
i) αC = {x ∈ R
n
: x = αy, y ∈ C} is convex, where α ∈ R.
ii) C + Q is convex.
Problem 2. 29. Let k·k : R
n
→ R be a vector norm on R
n
. Show that
k· k is convex.
Problem 2.30. Let I be an index set, C ⊂ R
n
be a convex s et, and
f
i
: C → R be a convex function for each i ∈ I. Show that g : C → R ∪{∞}
given by g(x) = sup
i∈I
f
i
(x) is convex.
Problem 2.31. Let C ⊂ R
n
be a convex set and let f : C → R be
continuously differentiable. Show that:
i) f is convex if and only if
f(y) ≥ f (x) + (y − x)
T
f
′
(x), x, y ∈ C. (2.249)
ii) If the inequality in (2.249) is s trict whenever x 6= y, then f is s trictly
convex.
Problem 2.32. Let C ⊂ R
n
be a convex set, let f : C → R be two-times
continuously differentiable, and let P be an n ×n symmetric matrix. Show
that:
i) I f f
′′
(x) ≥ 0, x ∈ C, then f is convex.
ii) If f
′′
(x) > 0, x ∈ C, x 6= 0, then f is strictly convex.