Haddad W.M. Nonlinear Dynamical Systems and Control: A Lyapunov-Based Approach
Подождите немного. Документ загружается.


NonlinearBook10pt November 20, 2007
DYNAMICAL SYSTEMS AND DIFFERENTIAL EQUATIONS 75
i) Under what cond itions does (2.136) have at least one solution for a
given x
0
∈ D?
ii) Under what conditions does (2.136) have a unique solution for a given
x
0
∈ D?
iii) What is the maximal interval of existence over which one or more
solutions to (2.136) exist?
iv) What is the sensitivity of the solutions to (2.136) to initial data and/or
parameter perturbations?
Before addressing each of the above questions, we present a series of
examples that demonstrate the need for pr oviding conditions that guarantee
the existence and uniqueness of solutions to nonlinear differential equations.
Example 2.31. Consider the scalar non linear dynamical system
˙x(t) = −sign(x(t)), x(0) = 0, t ≥ 0, (2.138)
where
sign(x)
△
=
1, x ≥ 0,
−1, x < 0.
(2.139)
Now, note that since
d
dt
x
2
(t) = − 2x(t)sign(x(t)) = −2|x(t)| ≤ 0, it f ollows
that x
2
(·) is a decreasing fu nction of time. Hence, if x(0) = 0, then x(t) = 0
for all t ≥ 0, which implies ˙x(t) = 0, t ≥ 0. In this case, sign(0) = 0,
which leads to a contradiction. Hence, there does not exist a continuously
differentiable function x(·) that satisfies (2.138). Note that the function
f(x) = −sign(x) is not continuous at x = 0. △
Example 2.32. Consider the scalar non linear dynamical system
˙x(t) = 3x
2/3
(t), x(0) = 0, t ≥ 0. (2.140)
This sys tem has two solutions given by x(t) = t
3
and x(t) = 0, t ≥ 0. Note
that the fu nction f(x) = 3x
2/3
is continuous at x = 0; however, it is not
Lipschitz continuous at x = 0. △
Example 2.33. Consider the scalar non linear dynamical system
˙x(t) = x
2
(t), x(0) = 1, t ≥ 0. (2.141)
Using separation of variables, the solution to (2.141) is given by
x(t) =
1
1 −t
. (2.142)
The solution (2.142) is defined for t ∈ [0, 1) and becomes unbounded as
t → 1. The solution has a finite escape time and, hence, exists only locally
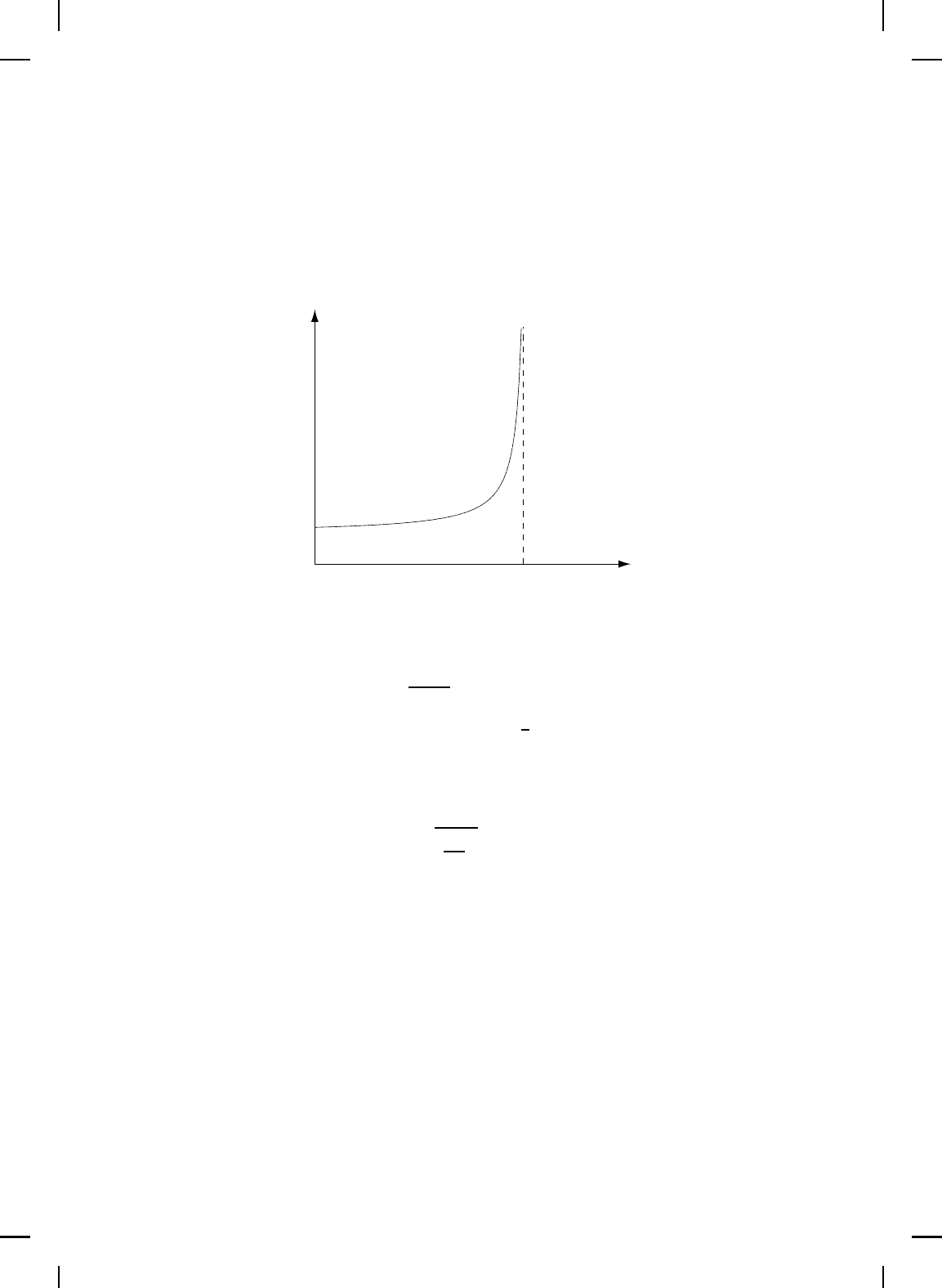
NonlinearBook10pt November 20, 2007
76 CHAPTER 2
(see Figure 2.4). Note that even though (2.142) has another branch defined
on the interval (1, ∞), this branch is not considered part of the solution to
(2.141) since the initial time t
0
= 0 6∈ (1, ∞). Finally, note that f(x) = x
2
is
continuous and Lipschitz continuous at x = 0. However, f (x) is not globally
Lipschitz continuous on R. △
x(t)
t
0 1
1
Figure 2.4 Solution exhibiting finite escape time.
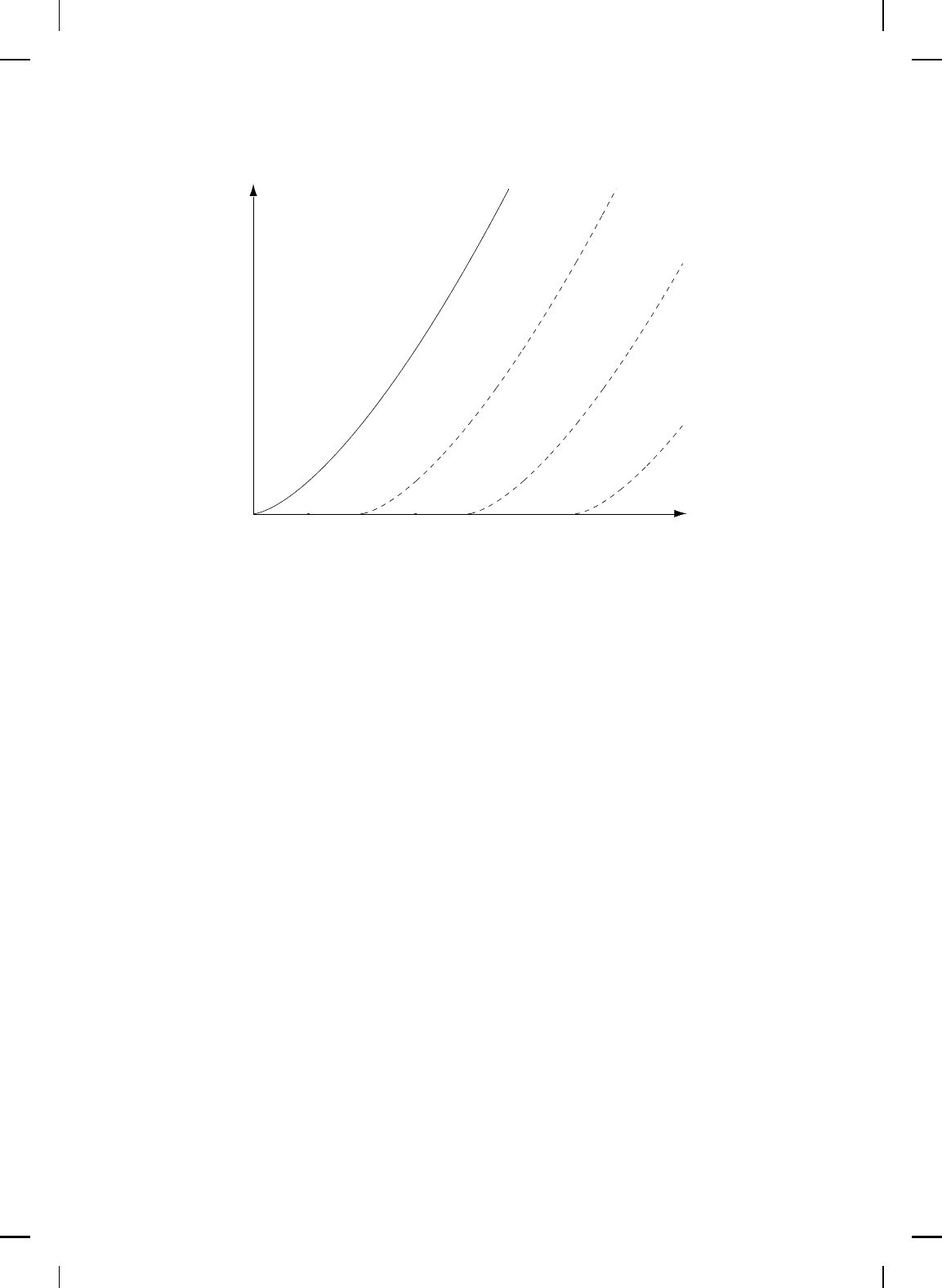
Example 2.34. Consider the scalar nonlinear dynamical system
˙x(t) =
p
|x(t)|, x(0) = 0, t ≥ 0. (2.143)
Clearly, x(t) = 0, t ≥ 0, as well as x(t) =
1
4
t
2
are solutions to (2.143). In
fact, th ere are in finitely many solutions to (2.143), parameterized by the
arbitrary time T , and are given by (see Figure 2.5)
x(t) =
0, 0 ≤ t ≤ T,
(t−T )
2
4
, t > T.
(2.144)
Note that the f unction f(x) =
p
|x| is continuous at x = 0; however, f(x)
is not Lipschitz continuous at x = 0. △
Examples 2.32–2.34 analyze nonlinear differential equations having
multiple solutions as well as finite escape time. However, th e nonlinear
differential equation in Example 2.31 does not have a solution in the sense
of the definition given in this section. The question of existence of solutions
is fundamental in the stud y of dynamical systems. The following result
provides a sufficient condition for the existence of solutions of (2.136) over
an interval [t
0
, τ] for sufficiently small τ ∈ (t
0
, t
1
).
Theorem 2.24 (Peano). C on s ider the nonlinear dynamical system
NonlinearBook10pt November 20, 2007
DYNAMICAL SYSTEMS AND DIFFERENTIAL EQUATIONS 77
x(t)
t
0 T 2T 3T
Figure 2.5 Multiple solutions.
(2.136). Assume f : D → R
n
is continuous on D. Then for every x
0
∈ D and
t
0
> 0 there exists τ > t
0
such that (2.136) has a continuously differentiable
solution x : [t
0
, τ] → R
n
.
Proof. L et η > 0 be such that B
η
(x
0
) ⊆ D and let M
△
= sup{kf(x)k :
x ∈ B
η
(x
0
)}. Now, let α, β > 0 be such that Mα ≤ β ≤ ε and let
S
△
= {x(·) ∈ C[t
0
, τ] : |||x − x
0
||| ≤ η, x(t
0
) = x
0
, t ∈ [t
0
, τ]},
where τ
△
= t
0
+ α. Note that S is convex, closed, and bounded. Next, let
P : C[t
0
, τ] → C[t
0
, τ] be given by
(P x)(t)
△
= x
0
+
Z
t
t
0
f(x(s))ds, t ∈ [t
0
, τ]. (2.145)
Now, it follows that
k(P x)(t) −x
0
k =
Z
t
t
0
f(x(s))ds
≤
Z
t
t
0
kf(x(s))kdt
≤ M|t −t
0
|
≤ Mα

NonlinearBook10pt November 20, 2007
78 CHAPTER 2
≤ β, t ∈ [t
0
, τ],
which implies that P (S) is boun ded. Furthermore, since f is continuous on
D it follows that for every ε > 0, there exists δ > 0 such that
k(P x)(t) − (P ˆx)(t)k =
Z
t
t
0
[f(x(s)) −f (ˆx(s))]ds
≤
Z
t
t
0
kf(x(s)) −f (ˆx(s))kdt
≤ εα, t ∈ [t
0
, τ], sup
t∈[t
0
,τ]
kx(t) − ˆx(t)k < δ.
The result now is a dir ect consequence of the Schauder fi xed point theorem
(see Problem 2.93) and the fact that x(t) = (P x)(t) is a s olution to (2.136)
if and only if x(t) is a fixed point of P .
In order to guarantee the existence and uniqueness of solutions to
(2.136) we strengthen the hypothesis in Theorem 2.24. Specifically, we
assume that f is Lipschitz continuous on D. The following theorem gives
sufficient conditions for existence and uniqueness of solutions to (2.136). We
state the result for the right-hand limit; the result for the left-hand limit is
analogous.
Theorem 2.25. Consider the nonlinear dynamical system (2.136).
Assume that f : D → R
n
is L ipschitz continuous on D. Then, for all
x
0
∈ D, there exists τ ∈ (t
0
, t
1
) such that (2.136) has a unique solution
x : [t
0
, τ] → R
n
over the interval [t
0
, τ].
Proof. It f ollows from Theorem 2.24 that there exists τ > 0 and
x : [t
0
, τ] → R
n
such that x(·) is a continuous solution to (2.136). Now, let
(P x)(t)
△
= x
0
+
Z
t
t
0
f(x(s))ds, t ∈ [t
0
, τ], (2.146)
so that x(t) = (P x)(t). Note that P : C[t
0
, τ] → C[t
0
, τ]. Furthermore, define
S
△
= {x(·) ∈ C[t
0
, τ] : |||x −x
0
||| ≤ r}, where r > 0 and x
0
: C[t
0
, τ] → C[t
0
, τ]
is such that x
0
(t) = x
0
for all t ∈ [t
0
, τ]. Note that x(·) is a s olution to
(2.136) over [t
0
, τ] if and only if (P x)(·) = x(·), that is, x(·) is a fixed point
of P . Hence, us ing the fact that f : D → R
n
is Lipschitz continuous on D
and kx(t) − x
0
k ≤ r, t ∈ [t
0
, τ], it follows that, for each x(·) ∈ S and each
t ∈ [t
0
, τ],
k(P x)(t) − x
0
k =
Z
t
t
0
f(x(s))ds
=
Z
t
t
0
[f(x(s)) − f(x
0
) + f (x
0
)]ds
NonlinearBook10pt November 20, 2007
DYNAMICAL SYSTEMS AND DIFFERENTIAL EQUATIONS 79
≤
Z
t
t
0
[kf(x(s)) − f (x
0
)k + kf(x
0
)k]ds
≤
Z
t
t
0
[Lkx(s) − x
0
k+ α]ds
≤
Z
t
t
0
(Lr + α)ds
= (t −t
0
)(Lr + α)
≤ (τ − t
0
)(Lr + α), (2.147)
where L > 0 is the Lipschitz constant of f with respect to x on B
r
(x
0
) ⊂ D
and α = α(x
0
) = kf(x
0
)k, and hence,
|||P x − x
0
||| = max
t∈[t
0
,τ]
k(P x)(t) − x
0
k ≤ (τ − t
0
)(Lr + α). (2.148)
Now, choosing τ − t
0
≤
r
Lr+α
ensures that |||P x − x
0
||| ≤ r, and hence,
P : S → S.
To sh ow that P : S → S is a contraction, let x(·) and y(·) ∈ S so that
x(t), y(t) ∈ B
r
(x
0
) for all t ∈ [t
0
, τ]. Hence,
(P x)(t) −(P y)(t) =
Z
t
t
0
[f(x(s)) − f(y(s))]ds, (2.149)
which implies
k(P x)(t) −(P y)(t)k ≤
Z
t
t
0
kf(x(s)) −f (y(s))kds
≤
Z
t
t
0
Lkx(s) − y(s)kds
≤ L|||x −y|||
Z
t
t
0
ds
= L(t − t
0
)|||x − y|||
≤ ρ|||x −y|||,
where |||x − y||| = max
t∈[t
0
,τ]
kx(t) − y(t)k and L(t − t
0
) ≤ L(τ − t
0
) ≤ ρ.
Thus ,
|||P x − P y||| = max
t∈[t
0
,τ]
k(P x)(t) − (P y)(t)k ≤ ρ|||x − y|||. (2.150)
Now, choosing (τ − t
0
) ≤ ρ/L and ρ < 1 ensures that P : S → S is a
contraction. Hence, it follows from Theorem 2.22 th at for
τ − t
0
≤ min
t
1
− t
0
,
r
Lr + α
,
ρ
L
,
(2.136) has a unique solution in S.
NonlinearBook10pt November 20, 2007
80 CHAPTER 2
Finally, we show that P h as a u nique fixed point in C[t, τ]. Suppose
x(·) ∈ C[t
0
, τ] satisfies (2.137). Then, x(0) = x
0
∈ B
r
(x
0
). Now, since x(·)
is continuous, it follows for sufficiently small t, x(t) ∈ B
r
(x
0
). Suppose, ad
absurdum, that there exists ˆτ ∈ (t
0
, τ) such that x(ˆτ) 6∈ B
r
(x
0
), that is,
kx(ˆτ ) − x
0
k > r. Since kx(t) − x
0
k is continuous in t and kx(0) − x
0
k = 0,
it follows that there exists τ
∗
< ˆτ < τ such that kx(t) − x
0
k < r for all
t ∈ [t
0
, τ
∗
) and kx(τ
∗
) − x
0
k = r. Now, for all t ≤ τ
∗
,
kx(t) − x
0
k =
Z
t
t
0
f(x(s))ds
=
Z
t
t
0
[f(x(s)) − f(x
0
) + f (x
0
)]ds
≤
Z
t
t
0
Lkx(s) − x
0
kds + α(t − t
0
)
≤ (t − t
0
)(Lr + α)
≤ (τ
∗
− t
0
)(Lr + α). (2.151)
Since, t ≤ τ
∗
it follows th at r = kx(τ
∗
) − x
0
k ≤ (τ
∗
− t
0
)(Lr + α). Hence,
(τ
∗
−t
0
) ≥
r
Lr+α
≥ τ − t
0
, which is a contradiction. Hence, if x(·) ∈ C[t
0
, τ]
satisfies (2.136) s uch that τ − t
0
≤ min{t
1
− t
0
,
r
Lr+α
,
ρ
L
}, then x(·) ∈ S.
Thus , if x
∗
(·) is a fixed point of C[t
0
, τ], then x
∗
∈ S, which shows that
(2.136) has a unique solution over the interval [t
0
, τ].
The following corollary to Theorem 2.25 is immediate.
Corollary 2.3. Consider the nonlinear dynamical system (2.136).
Assume that f : D → R
n
is continuously differentiable on D. Then, for
all x
0
∈ D, there exists τ ∈ (t
0
, t
1
) such that (2.136) has a unique solution
x : [t
0
, τ] → R
n
over the interval [t
0
, τ].
Proof. The proof follows by noting that continuous differentiability
on D implies Lipschitz continuity on D.
Next, we state and prove a very important theorem regarding the
sensitivity of solutions of (2.136) to the system initial data and system
parameters. For this result we require a key lemma due to Gronwall that
converts an implicit bound to an explicit bound.
Lemma 2.2 (Gronwall Lemma). Assume there exists a continuous
function x : R → R such that
x(t) ≤ α +
Z
t
t
0
βx(s)ds, t ≥ t
0
, (2.152)
NonlinearBook10pt November 20, 2007
DYNAMICAL SYSTEMS AND DIFFERENTIAL EQUATIONS 81
where α ∈ R and β ≥ 0. Then
x(t) ≤ αe
β(t−t
0
)
, t ≥ t
0
. (2.153)
Proof. Let α ∈ R and let
y(t) = α +
Z
t
t
0
βx(s)ds, t ≥ t
0
. (2.154)
Now, it follows from (2.152) that x(t) ≤ y(t), t ≥ t
0
, and hence, using
(2.154),
˙y(t) = βx(t) ≤ βy(t), y(t
0
) = α, t ≥ t
0
. (2.155)
Next, define z(t)
△
= ˙y(t) − βy(t) and note that (2.155) implies z(t) ≤ 0,
t ≥ t
0
. Hence,
y(t) = y(t
0
)e
β(t−t
0
)
+
Z
t
t
0
e
β(t−σ)
z(σ)dσ,
which implies
y(t) ≤ y(t
0
)e
β(t−t
0
)
= αe
β(t−t
0
)
, t ≥ t
0
.
The result is now immediate by noting that x(t) ≤ y(t), t ≥ t
0
.
Theorem 2.26. Consider the nonlinear dynamical system (2.136).
Assume that f : D → R
n
is uniformly Lipschitz continuous on D.
Furth ermore, let x(t) and y(t) be solutions to (2.136) with initial conditions
x(t
0
) = x
0
and y(t
0
) = y
0
over the closed interval [t
0
, t
1
]. Then, for
each ε > 0 and t ∈ [t
0
, t
1
], there exists δ = δ(ε, t − t
0
) > 0 such that if
kx
0
− y
0
k < δ, then kx(t) − y(t)k ≤ ε.
Proof. Note that x(t) and y(t), t ∈ [t
0
, t
1
], satisfy
x(t) = x
0
+
Z
t
t
0
f(x(s))ds, (2.156)
y(t) = y
0
+
Z
t
t
0
f(y(s))ds. (2.157)
Subtracting (2.157) from (2.156) yields
x(t) − y(t) = x
0
− y
0
+
Z
t
t
0
[f(x(s)) −f (y(s))]ds. (2.158)
Now, (2.158) implies
kx(t) − y(t)k ≤ kx
0
− y
0
k+
Z
t
t
0
kf(x(s)) −f (y(s))kds
≤ kx
0
− y
0
k+ L
Z
t
t
0
kx(s) − y(s)kds, (2.159)

NonlinearBook10pt November 20, 2007
82 CHAPTER 2
where L > 0 is the Lipschitz constant of f. Using Lemma 2.2 it follows
that kx(t) − y(t)k ≤ kx
0
− y
0
ke
L(t−t
0
)
, t ∈ [t
0
, t
1
]. Hence, for every ε > 0,
choosing δ = δ(ε, t − t
0
) =
ε
e
L(t−t
0
)
yields the result.
Theorem 2.26 shows that the solution x(t), t ∈ [t
0
, t
1
], of (2.136)
depends continuously on the initial condition x(0) over a finite time interval.
This is not true in general over the semi-infinite interval [t
0
, ∞). If th is
were the case over the semi-infinite interval and δ(ε, t) could be chosen
independ ent of t, then continuous dependence of solutions uniformly in t
for all t ≥ 0 would imply Lyapunov stability of the solutions; a concept
introduced in Chapter 3. Furthermore, since Th eorem 2.26 imp lies
kx(t) − y(t)k ≤ kx
0
− y
0
ke
L(t−t
0
)
, t ∈ [t
0
, t
1
], (2.160)
it follows that for each t ∈ [t
0
, t
1
],
lim
y
0
→x
0
s(t, y
0
) = s(t, x
0
). (2.161)
In addition, (2.160) implies that this limit is uniform for all t ∈ [t
0
, t
1
].
It is important to note that T heorem 2.26 also holds for the case where
f : D → R
n
is Lipschitz continuous on D. In this case, h owever, continuous
dependence on the initial conditions of s(t, y
0
) holds for s(·, ·) ∈ Q, where
Q = [t
0
, t
1
] × N
δ
(x
0
) and N
δ
(x
0
) ⊂ D. Finally, it is important to note
that Gronwall’s lemma can be used to give an alternative proof of Theorem
2.25. In particular, if, ad absurdum, we assume th at x(t) and y(t) are two
solutions to (2.136) with initial conditions x(t
0
) = x
0
and y(t
0
) = x
0
over
the closed interval [t
0
, t
1
], then it f ollows from (2.160) that kx(t)−y(t)k ≤ 0,
t ∈ [t
0
, t
1
]. This of cours e implies that x(t) = y(t), t ∈ [t
0
, t
1
], establishing
uniqueness of solutions.
The next result presents a m ore general version of Theorem 2.26 in-
volving continuous dependence on initial conditions and system parameters.
For this result, consider the nonlinear dynamical system
˙x(t) = f (x(t), λ), x(t
0
) = x
0
, t ∈ I
x
0
,λ
, (2.162)
where x(t) ∈ D, t ∈ I
x
0
,λ
, D is an open subset of R
n
, λ ∈ R
m
is a system
parameter vector, f : D × R
m
→ R
n
is such that f (·, λ) is Lipschitz
continuous on D, f(x, ·) is uniformly Lipschitz continuous on R
m
, and
I
x
0
,λ
= (τ
min
, τ
max
) ⊂ R is the maximal interval of existence for the solution
x(·) of (2.162).
Theorem 2.27. Consider the nonlinear dynamical system (2.162).
Assume that f : D × R
m
→ R
n
is such that for every λ ∈ R
m
, f(·, λ)
is Lipschitz continuous on D and for every x ∈ D, f(x, ·) is globally
Lipschitz continuous on R
m
. Furthermore, let x(t) and y(t) be solutions to
(2.162) with system parameters λ and µ, respectively, and initial conditions
NonlinearBook10pt November 20, 2007
DYNAMICAL SYSTEMS AND DIFFERENTIAL EQUATIONS 83
x(t
0
) = x
0
and y(t
0
) = y
0
over the closed interval [t
0
, t
1
]. Then, for each
ε > 0 and t ∈ [t
0
, t
1
], there exists δ = δ(ε, t−t
0
) > 0 such that if kx
0
−y
0
k < δ
and kλ −µk < δ, then kx(t) −y(t)k ≤ ε.
Proof. The p roof is a direct consequence of Theorem 2.26 with x
0
,
x, y
0
, and y replaced by [x
T
0
λ
T
]
T
, [x
T
λ
T
]
T
, [y
T
0
µ
T
]
T
, and [y
T
µ
T
]
T
,
respectively.
As in the case of Theorem 2.26, Theorem 2.27 implies that
ks(t, x
0
, λ)−s(t, y
0
, µ)k ≤ (kx
0
−y
0
k+kλ−µk)e
L(t−t
0
)
, t ∈ [t
0
, t
1
], (2.163)
and h en ce,
lim
(y
0
,µ)→(x
0
,λ)
s(t, y
0
, µ) = s(t, x
0
, λ), (2.164)
uniformly for all t ∈ [t
0
, t
1
].
Next, we present a different kind of continuity of parameter result. In
particular, we show that given two dynamical systems
˙x(t) = f (x(t)), x(t
0
) = x
0
, t ∈ [t
0
, t
1
], (2.165)
˙y(t) = g(y(t)), y(t
0
) = y
0
, t ∈ [t
0
, t
1
], (2.166)
where f : D → R
n
and g : D → R
n
are both Lipschitz continuous on D,
and kf(x) − g(x)k ≤ ε, x ∈ D, the solutions to (2.165) and (2.166) with
kx
0
− y
0
k ≤ γ remain nearby over a finite time interval.
Theorem 2.28. Consider the nonlinear dynamical system (2.165) and
(2.166). Ass ume that f : D → R
n
is uniformly Lipschitz continuous on D
with Lipschitz constant L and g : D → R
n
is Lips chitz continuous on D.
Furth ermore, suppose that
kf(x) −g(x)k ≤ ε, x ∈ D. (2.167)
If x(t) and y(t) are solutions to (2.165) and (2.166) on some time interval
I ⊂ R with kx
0
− y
0
k ≤ γ, then
kx(t) − y(t)k ≤ γe
L|t−t
0
|
+
ε
L
(e
L|t−t
0
|
− 1). (2.168)
Proof. For t ∈ I it follows that
x(t) −y(t) = x
0
− y
0
+
Z
t
t
0
[f(x(s)) − g(y(s))]ds. (2.169)
Now, (2.169) implies
kx(t) −y(t)k ≤ kx
0
− y
0
k +
Z
t
t
0
kf(x(s)) −g(y(s))kds
NonlinearBook10pt November 20, 2007
84 CHAPTER 2
≤ γ +
Z
t
t
0
kf(x(s)) −f (y(s)) + f(y(s)) − g(y(s))kds
≤ γ +
Z
t
t
0
kf(x(s)) −f (y(s))kds +
Z
t
t
0
kf(y(s)) − g(y(s))kds
≤ γ +
Z
t
t
0
Lkx(s) − y(s)kds +
Z
t
t
0
εds, t ∈ I. (2.170)
Next, defining q(t)
△
= kx(t) − y(t)k, (2.170) implies
q(t) ≤ γ + L
Z
t
t
0
h
q(s) +
ε
L
i
ds, t ∈ I, (2.171)
or, equivalently,
q(t) +
ε
L
≤ γ +
ε
L
+ L
Z
t
t
0
h
q(s) +
ε
L
i
ds, t ∈ I. (2.172)
Now, using Gronwall’s lemma it follows that
q(t) +
ε
L
≤
ε
L
+ γ
e
L|t−t
0
|
, t ∈ I, (2.173)
which implies (2.168).
Theorem 2.28 shows that, given two solutions to a dynamical system
with initial conditions that are close at the same value of time, these
solutions will remain close over the entire time interval I and n ot j ust at
the initial time. Furthermore, it is clear from (2.168) that bounds on the
initial condition errors and the solution errors grow exponentially in time,
with the Lipschitz constant L controlling the growth rate. In the study
of robustness, that is, sensitivity to system parameter variations, (2.168)
tells us that a solution to an approximate dynamical system will serve as
an approximate solution to the actual system over a finite time interval.
Furth ermore, (2.168) clearly shows why the qualitative study of differential
equations is necessary an d why numerical method s (which are approximate
by d efi nition) are inherently fragile over long periods of time and can be
untru stworthy.
Finally, we close this section with a proposition th at shows that the
solution of a nonlinear system satisfying a uniform Lipschitz continuity
condition is exponentially bounded from above and below.
Proposition 2.30. Consider the nonlinear dynamical system (2.136).
Assume f : D → R
n
is uniformly Lipschitz continuous on D with Lipschitz
constant L and f (0) = 0. Then the solution x(t) of (2.136) over the closed
interval [t
0
, t
1
] satisfies
kx
0
k
2
e
−L|t−t
0
|
≤ kx(t)k
2
≤ kx
0
k
2
e
L|t−t
0
|
, t ∈ [t
0
, t
1
]. (2.174)