Haddad W.M. Nonlinear Dynamical Systems and Control: A Lyapunov-Based Approach
Подождите немного. Документ загружается.


NonlinearBook10pt November 20, 2007
DYNAMICAL SYSTEMS AND DIFFERENTIAL EQUATIONS 95
i) (Continuity): s(t, t
0
, ·) is continuous and s(·, t
0
, x
0
) is continuously
differentiable in t for all x
0
∈ D and t, t
0
∈ R.
ii) (Con s istency): For every x
0
∈ D and t
0
∈ R, s(t
0
, t
0
, x
0
) = x
0
.
iii) (Group property): s(t
2
, t
0
, x
0
) = s(t
2
, t
1
, s(t
1
, t
0
, x
0
)) for all t
0
, t
1
, t
2
∈
R and x
0
∈ D.
As for the time-invariant case, we denote the time-varying dynamical
system (D, R, s) by G. Note th at if for every t
0
, t ∈ R such that t ≥ t
0
, and
τ ∈ R, x
0
∈ D, s(t + τ, t
0
+ τ, x
0
) = s(t, t
0
, x
0
), then the fu nction s(·, ·, ·)
remains unchanged under time translation. Hence, without loss of generality
we can set t
0
= 0. In this case, Definition 2.48 collapses to Definition 2.47
with s(t, 0, x
0
) = s(t, x
0
). As in the time-invariant case, since a time-varying
dynamical system involves the function s(·, ·, ·) describing the motion of
x ∈ D for all t ∈ R, it generates a time-varying differential equation on D.
In particular, the f unction f : R ×D → R
n
given by
f(t, x)
△
= lim
τ→t
1
t − τ
[s(t, t
0
, x) −s(τ, t
0
, x)] (2.211)
defines a continuous vector field on D. Hence, the dynamical system G
defined by Definition 2.48 gives rise to the time-varying differential equation
˙x(t) = f (t, x(t)), x(t
0
) = x
0
, t ∈ I
x
0
. (2.212)
Existence and uniqueness of solutions, extendability of solutions, and
continuous dependence on initial conditions and system parameter theorems
can now be developed for (2.212) as in the case for time-invariant systems.
To see that these results will not significantly differ fr om the results already
developed note that by defining x
1
(τ)
△
= x(t) and x
2
(τ)
△
= t, where τ = t−t
0
,
the solution x(t), t ∈ I
x
0
, to the nonlinear time-varying dynamical system
(2.212) can be equivalently characterized by the solution x
1
(τ), τ ∈ I
x
0
,t
0
,
to the nonlinear time-invariant system
˙x
1
(τ) = f(x
2
(τ), x
1
(τ)), x
1
(0) = x
0
, τ ∈ I
x
0
,t
0
, (2.213)
˙x
2
(τ) = 1, x
2
(0) = t
0
, (2.214)
where ˙x
1
(·) and ˙x
2
(·) in (2.213) and (2.214) denote differentiation with
respect to τ . Next, we state the key results on the existence and
uniqueness of solutions for time-varying dynamical systems needed for later
developments. The pr oofs of these results are similar to the proofs given in
earlier sections and are left as exercises for the reader.
Theorem 2.37. Consider the nonlinear dynamical system (2.212).
Assume f(t, ·) : D → R
n
is continuous on D for all t ∈ [t
0
, t
1
] and f(·, x) :
[t
0
, t
1
] → R
n
is piecewise continuous on [t
0
, t
1
] for all x ∈ D. Then for every

NonlinearBook10pt November 20, 2007
96 CHAPTER 2
x
0
∈ D there exists τ > t
0
such that (2.212) has a piecewise continuously
differentiable solution x : [t
0
, τ] → R
n
. Furthermore, if f (·, x) : [t
0
, t
1
] → R
n
is continuous on [t
0
, t
1
] for all x ∈ D, then x : [t
0
, τ] → R
n
is continuously
differentiable on [t
0
, τ].
Theorem 2.38. Consider the nonlinear dynamical system (2.212).
Assume f (t, ·) : D → R
n
is Lipschitz continuous on D for all t ∈ [t
0
, t
1
]
and f(·, x) : [t
0
, t
1
] → R
n
is piecewise continuous on [t
0
, t
1
] for all x ∈ D.
Then, for every x
0
∈ D, there exists τ ∈ (t
0
, t
1
) such that (2.212) has a
unique solution x : [t
0
, τ] → R
n
over the interval [t
0
, τ].
Theorem 2.39. Consider the nonlinear dynamical system (2.212).
Assume f (t, ·) : D → R
n
is Lipschitz continuous on D for all t ∈ [t
0
, t
1
]
and f(·, x) : [t
0
, t
1
] → R
n
is piecewise continuous on [t
0
, t
1
] for all x ∈ D.
Furth ermore, let D
c
⊂ D be compact and suppose for x
0
∈ D
c
every solution
x : [t
0
, τ] → D lies entirely in D
c
. Then there exists a unique solution
x : [t
0
, ∞) → R
n
to (2.212) for all t ≥ t
0
.
Theorem 2.40. Consider the nonlinear dynamical system (2.212).
Assume f (t, ·) : D → R
n
is Lipschitz continuous on D for all t ∈ [t
0
, t
1
]
and f(·, x) : [t
0
, t
1
] → R
n
is piecewise continuous on [t
0
, t
1
] for all x ∈ D. In
addition, assume there exists α = α(x
0
) such that max
t∈R
kf(t, x
0
)k ≤ α.
Then, for all x
0
∈ R
n
, (2.212) has a unique solution x : (−∞, ∞) → R
n
over
all t ∈ R.
If we assume that f (t, 0) = 0, t ∈ R, then the assumption kf(t, x
0
)k ≤
α in Theorem 2.40 follows as a direct consequence of Lipschitz continuity
condition on f(t, ·) : D → R
n
and, hence, is automatic. To see this, note
that in this case Lipschitz continuity implies that kf(t, x
0
)k ≤ Lkx
0
k. In
this book we will assume that f(·, ·) has at least one equilibrium point in D
so that, without loss of generality, f (t, 0) = 0, t ∈ R. However, as seen in
Example 2.2, there are systems that have no equilibrium points. For these
systems, the assumption kf(t, x
0
)k ≤ α in Theorem 2.40 is necessary.
2.12 Limit Points, Limit Sets, and Attractors
In this section, we introduce the notion of invariance with respect to the flow
s
t
(x
0
) of a nonlinear dynamical system. Consider the nonlinear dynamical
system
˙x(t) = f (x(t)), x(0) = x
0
, t ∈ R, (2.215)
where x(t) ∈ D, t ∈ R, D is an open subset of R
n
, and f : D → R
n
is
Lipschitz continuous on D. Recall that (2.215) defines a dynamical system
in the sense of Definition 2.47 with flow s : R × D → D. In addition, recall
that for x ∈ D, the map s(·, x) : R → D defines the solution curve or

NonlinearBook10pt November 20, 2007
DYNAMICAL SYSTEMS AND DIFFERENTIAL EQUATIONS 97
trajectory of (2.215) through the point x in D. Identifying s(·, x) with its
graph, the trajectory or orbit of a point x
0
∈ D is defined as the motion
along the curve
O
x
0
△
= {x ∈ D : x = s(t, x
0
), t ∈ R}. (2.216)
For t ≥ 0, we define the positive orbit throu gh the point x
0
∈ D as the
motion along the curve
O
+
x
0
△
= {x ∈ D : x = s(t, x
0
), t ≥ 0}. (2.217)
Similarly, the negative orbit through the point x
0
∈ D is defined as
O
−
x
0
△
= {x ∈ D : x = s(t, x
0
), t ≤ 0}. (2.218)
Hence, th e orbit O
x
of a point x ∈ D is given by O
+
x
∪ O
−
x
= {s(t, x) : t ≥
0} ∪ {s(t, x) : t ≤ 0}.
Definition 2.49. A point p ∈ D is a positive limit point of the
trajectory s(·, x) of (2.215) if there exists a m on otonic sequence {t
n
}
∞
n=0
of positive numbers, with t
n
→ ∞ as n → ∞, such that s(t
n
, x) → p as
n → ∞. A point q ∈ D is a negative limit point of the trajectory s(·, x) of
(2.215) if there exists a monotonic sequence {t
n
}
∞
n=0
of negative numbers,
with t
n
→ −∞ as n → ∞, such that s(t
n
, x) → q as n → ∞. The set of all
positive limit points of s(t, x), t ≥ 0, is the positive limit set ω(x) of s(·, x) of
(2.215). The set of all negative limit points of s(t, x), t ≤ 0, is the negative
limit set α(x) of s(·, x) of (2.215).
An equivalent definition of ω(x
0
) and α(x
0
) which is geometrically
easier to see is ω(x
0
) = ∩
t≥0
O
+
x
0
and α(x
0
) = ∩
t≤0
O
−
x
0
(see Problem 2.114).
In the literature, the positive limit set is often referred to as the ω-limit set
while the negative limit set is referred to as th e α-limit set. Note that if
p ∈ D is a positive limit point of the trajectory s(·, x), then for all ε > 0
and finite time T > 0 there exists t > T such that kx(t) − pk < ε. This
follows from the fact that kx(t) −pk < ε for all ε > 0 and some t > T > 0 is
equivalent to the existence of a sequence {t
n
}
∞
n=0
, with t
n
→ ∞ as n → ∞,
such that x(t
n
) → p as n → ∞. An analogous observation holds for negative
limit points.
Definition 2.50. A set M ⊂ D ⊆ R
n
is a positively invariant set
with respect to the nonlinear d y namical system (2.215) if s
t
(M) ⊆ M for
all t ≥ 0, where s
t
(M)
△
= {s
t
(x) : x ∈ M}. A set M ⊂ D ⊆ R
n
is
a negatively invariant set with respect to the nonlinear dynamical system
(2.215) if s
t
(M) ⊆ M f or all t ≤ 0. A set M ⊆ D is an invariant set with
respect to the dynamical system (2.215) if s
t
(M) = M for all t ∈ R.
In the case wh ere t ≥ 0 in (2.215), note that a set M ⊆ D is a
NonlinearBook10pt November 20, 2007
98 CHAPTER 2
negatively invariant set with respect to the nonlinear dynamical system
(2.215) if, for every y ∈ M and every t ≥ 0, there exists x ∈ M such
that s(t, x) = y and s(τ, x) ∈ M for all τ ∈ [0, t]. Hence, if M is negatively
invariant, then M ⊆ s
t
(M) for all t ≥ 0; the converse, however, is not
generally true. Furthermore, a set M ⊂ D is an invariant set with respect
to (2.215) (defined over t ≥ 0) if s
t
(M) = M for all t ≥ 0. Note that a set
M is invariant if and only if M is positively and negatively invariant.
The following propositions give several properties of positively invari-
ant, negatively invariant, and invariant sets.
Proposition 2.31. Consider the nonlinear d ynamical system G given
by (2.215). Let {M
i
: i ∈ I} be a collection of positively invariant
(respectively, negatively invariant or invariant) sets with respect to G. T hen
M =
T
i∈I
M
i
and N =
S
i∈I
M
i
are positively invariant (respectively,
negatively invariant or invariant) sets with respect to G.
Proof. Let the sets M
i
be positively invariant. For every x ∈ N,
it follows that x ∈ M
i
for some i ∈ I. Since M
i
is positively invariant,
s(t, x) ∈ M
i
for all t ≥ 0. Thus, since M
i
⊆ N, s(t, x) ∈ N for all t ≥ 0,
and hence, N is positively invariant. Next, let x ∈ M. I n this case, x ∈ M
i
for every i ∈ I and since each M
i
is positively invariant, s(t, x) ∈ M
i
for
each i ∈ I and each t ≥ 0. Hence, s(t, x) ∈
T
i∈I
M
i
= M for each t ≥ 0,
which proves positive invariance of M. The proofs for negative invariance
and invariance are analogous and are left as exercises for the reader.
Proposition 2.32. Consider the nonlinear d ynamical system G given
by (2.215). Let M ⊂ D be a positively invariant (respectively, negatively
invariant or invariant) set with respect to G. Then M is positively invariant
(respectively, negatively invariant or invariant) with respect to G.
Proof. Let M be invariant and let x ∈ M and t ∈ R. In this case,
there exists a sequence {x
n
}
∞
n=0
⊆ M such that x
n
→ x as n → ∞. Since M
is invariant, s(t, x
n
) ∈ M for each n. Furthermore, since s(t, x
n
) → s(t, x)
as n → ∞ it follows that s(t, x) ∈ M, and hence, M is invariant. The proofs
of positive and negative invariance are identical and, hence, are omitted.
Proposition 2.33. Consider the nonlinear d ynamical system G given
by (2.215). Then M ⊂ D is positively invariant with respect to G if and
only if D \ M is negatively invariant with respect to G. Furthermore, M is
invariant with respect to G if and only if D \M is invariant w ith respect to
G.
Proof. Let M be positively invariant and suppose, ad absurdum, that
if x ∈ D \M and t ≤ 0, then s(t, x) 6∈ D \M. Hence, s(t, x) ∈ M and since
NonlinearBook10pt November 20, 2007
DYNAMICAL SYSTEMS AND DIFFERENTIAL EQUATIONS 99
−t ≥ 0, s(−t, s(t, x)) = s(−t+t, x) = s(0, x) = x ∈ M by positive invariance
of M. This contradiction shows that D \ M is negatively invariant. The
converse statement follows by retracing the steps above. Finally, the second
part of the theorem follows as a direct consequence from the first part.
Proposition 2.34. Consider the nonlinear d ynamical system G given
by (2.215). Let M ⊂ D be invariant with respect to G. Then ∂M and
◦
M
are invariant with respect to G.
Proof. It follows from Proposition 2.33 that if M is invariant with
respect to G, then D \ M is invariant with respect to G. Hence, by
Proposition 2.32, M and D \M are invariant with respect to G. Now,
it follows from Pr opositions 2.31 and 2.33 that ∂M = M ∩ (D \ M) and
◦
M= D \ (D \ M) are invariant with respect to G.
The converse of Proposition 2.34 holds whenever M is open or closed.
To see this, note that if ∂M is invariant with respect to G, then
◦
M is
invariant with respect to G. This simple fact can be shown by a contradiction
argument. Specifically, suppose, ad absurdum, that there exist x ∈
◦
M and
t ∈ R such th at s(t, x) 6∈
◦
M. Now, since the set Q
△
= {y ∈ D : y = s(t, x), t ∈
[0, τ]} is connected it follows that Q ∩ ∂M 6= Ø, where we have assumed
t ≥ 0 for convenience. Hence, there exists t
∗
∈ (0, t] such that s(t
∗
, x) ∈ ∂M.
However, in this case, x = s(−t
∗
, s(t
∗
, x)) = s(−t
∗
+ t
∗
, x) ∈ ∂M, which by
invariance of ∂M contradicts x ∈
◦
M. This shows that if ∂M is invariant
with respect to G, then
◦
M is invariant with respect to G. Thus, if M is
closed then M = ∂M∪
◦
M is invariant, whereas if M is open then M =
◦
M
is invariant. Similarly, it can be shown that if
◦
M is nonempty and invariant,
then M is also invariant whenever M is closed or open.
Proposition 2.35. Consider the nonlinear d ynamical system G given
by (2.215). Let M ⊂ D be positively (respectively, negatively) invariant
with respect to G. Then
◦
M is positively (respectively, negatively) invariant
with respect to G.
Proof. Assume M is positively invariant. Then by Propositions 2.32
and 2.33 D \ M and D \ M are negatively invariant. Hence,
◦
M= D \
(D \ M) is positively invariant. The case where M is n egatively invariant
follows using identical arguments.
Definition 2.51. The trajectory s(·, x) of (2.215) is bounded if there

NonlinearBook10pt November 20, 2007
100 CHAPTER 2
exists γ > 0 such that ks(t, x)k < γ, t ∈ R.
Next, we state and prove a key theorem involving positive limit sets.
An analogous result holds for negative limit sets an d is left as an exercise
for the reader (see Problem 2.113). In the case where t ≥ 0, we refer to the
group property in Definition 2.47 as the semigroup property. Furthermore,
we use the notation x(t) → M ⊆ D as t → ∞ to denote that x(t) approaches
M, that is, for each ε > 0 there exists T > 0 such that dist(x(t), M) < ε
for all t > T , where dist(p, M)
△
= inf
x∈M
kp −xk.
Theorem 2.41. Suppose the solution x(t) to (2.215) correspond ing
to an initial condition x(0) = x
0
is bounded for all t ≥ 0. Then the
positive limit set ω(x
0
) of x(t), t ≥ 0, is a nonempty, compact, invariant,
and connected set. Fur thermore, x(t) → ω(x
0
) as t → ∞.
Proof. Let x(t), t ≥ 0, or, equivalently, s(t, x
0
), t ≥ 0, denote
the solution to (2.215) corresponding to the initial condition x(0) = x
0
.
Next, since x(t) is bounded for all t ≥ 0, it follows from the Bolzano-
Weierstrass theorem (Theorem 2.3) that every sequ en ce in the positive orbit
O
+
x
0
△
= {s(t, x) : t ∈ [0, ∞)} has at least one accumulation point p ∈ D as
t → ∞, and hence, ω(x
0
) is nonempty. Next, let p ∈ ω(x
0
) so that there
exists an increasing unbounded sequence {t
n
}
∞
n=0
, with t
0
= 0, such that
lim
n→∞
x(t
n
) = p. Now, since x(t
n
) is uniformly bounded in n it follows that
the limit point p is bounded, which implies that ω(x
0
) is bounded. To show
that ω(x
0
) is closed let {p
i
}
∞
i=0
be a sequence contained in ω(x
0
) such that
lim
i→∞
p
i
= p. Now, since p
i
→ p as i → ∞ for every ε > 0, there exists an i
such that kp−p
i
k < ε/2. Next, since p
i
∈ ω(x
0
), there exists t ≥ T , where T
is arbitrary and fin ite, such that kp
i
−x(t)k < ε/2. Now, since kp−p
i
k < ε/2
and kp
i
−x(t)k < ε/2 it follows that kp −x(t)k ≤ kp
i
−x(t)k+ kp −p
i
k < ε,
and hence, p ∈ ω(x
0
). Thus, every accumulation point of ω(x
0
) is an element
of ω(x
0
) so that ω(x
0
) is closed. Hence, since ω(x
0
) is closed and bounded
it is compact.
To show positive invariance of ω(x
0
) let p ∈ ω(x
0
) so that th ere
exists an increasing unbounded sequence {t
n
}
∞
n=0
such that x(t
n
) → p
as n → ∞. Now, let s(t
n
, x
0
) denote the solution x(t
n
) of (2.215) with
initial condition x(0) = x
0
and note that since f : D → R
n
in (2.215) is
Lipschitz continuous on D, x(t), t ≥ 0, is the unique solution to (2.215) so
that by the semigroup property s(t + t
n
, x
0
) = s(t, s(t
n
, x
0
)) = s(t, x(t
n
)).
Now, since x(t), t ≥ 0, is continuous it follows that, for t + t
n
≥ 0,
lim
n→∞
s(t + t
n
, x
0
) = lim
n→∞
s(t, x(t
n
)) = s(t, p), and hen ce, s(t, p) ∈
ω(x
0
). Hence, s
t
(ω(x
0
)) ⊆ ω(x
0
), t ≥ 0, establishing positive invariance of
ω(x
0
).
NonlinearBook10pt November 20, 2007
DYNAMICAL SYSTEMS AND DIFFERENTIAL EQUATIONS 101
To show invariance of ω(x
0
) let y ∈ ω(x
0
) so that there exists an
increasing unbounded sequence {t
n
}
∞
n=0
such that s(t
n
, x
0
) → y as n → ∞.
Next, let t ∈ [0, ∞) and note that there exists N such that t
n
> t, n ≥
N. Hence, it follows from the semigroup property that s(t, s(t
n
− t, x
0
)) =
s(t
n
, x
0
) → y as n → ∞. Now, it follows from the Bolzano-Lebesgue theorem
(Theorem 2.4) that there exists a subsequence {z
n
k
}
∞
k=1
of the sequence
z
n
= s(t
n
−t, x
0
), n = N, N + 1, . . ., such that z
n
k
→ z ∈ D as k → ∞ and,
by definition, z ∈ ω(x
0
). Next, it follows from th e continuous dependence
property th at lim
k→∞
s(t, z
n
k
) = s(t, lim
k→∞
z
n
k
), and hence, y = s(t, z),
which implies th at ω(x
0
) ⊆ s
t
(ω(x
0
)), t ∈ [0, ∞). Now, using positive
invariance of ω(x
0
) it follows that s
t
(ω(x
0
)) = ω(x
0
), t ≥ 0, establishing
invariance of the positive limit set ω(x
0
).
To show connectedness of ω(x
0
), suppose, ad absurdum, th at ω(x
0
) is
not connected. In this case, there exist two nonempty closed sets P
+
1
and
P
+
2
such that P
+
1
∩ P
+
2
= Ø and ω(x
0
) = P
+
1
∪ P
+
2
. Since P
+
1
and P
+
2
are
closed and disjoint there exist two open sets S
1
and S
2
such that S
1
∩S
2
= Ø,
P
+
1
⊂ S
1
, and P
+
2
⊂ S
2
. Next, since f : D → R is Lipschitz continuous on D
it follows that the solution x(t), t ≥ 0, to (2.215) is a continuous fu nction of
t. Hence, there exist sequences {t
n
}
∞
n=0
and {τ
n
}
∞
n=0
such that x(t
n
) ∈ S
1
,
x(τ
n
) ∈ S
2
, and t
n
< τ
n
< t
n+1
, w hich implies that there exists a sequence
{τ
n
}
∞
n=0
, with t
n
< τ
n
< τ
n+1
, such that x(τ
n
) 6∈ S
1
∪S
2
. Next, since x(t) is
bounded for all t ≥ 0, it follows that x(τ
n
) → ˆp 6∈ ω(x
0
) as n → ∞, leading
to a contradiction. Hence, ω(x
0
) is connected.
Finally, to show x(t) → ω(x
0
) as t → ∞, suppose, ad absurdum,
x(t) 6→ ω(x
0
) as t → ∞. In this case, there exists a sequence {t
n
}
∞
n=0
, with
t
n
→ ∞ as n → ∞, such that
inf
p∈ω(x
0
)
kx(t
n
) − pk > ε, n ∈ Z
+
. (2.219)
However, since x(t), t ≥ 0, is bounded, the bounded sequence {x(t
n
)}
∞
n=0
contains a convergent subsequence {x(t
∗
n
)}
∞
n=0
such that x(t
∗
n
) → p
∗
∈ ω(x
0
)
as n → ∞, which contradicts (2.219). Hence, x(t) → ω(x
0
) as t → ∞.
It is important to note that Theorem 2.41 holds for time-invariant
nonlinear dynamical systems (2.215) possessing u nique solutions forward in
time with the solutions being continuous f unctions of the initial conditions.
More generally, letting s(·, x
0
) denote the solution of a d y namical system
with initial condition x(0) = x
0
, Theorem 2.41 holds if s(t + τ, x
0
) =
s(t, s(τ, x
0
)), t, τ ≥ 0, and s(·, x
0
) is a continuous function of x
0
∈
D. Of course, if f(·) is Lipschitz continuous on D then there exists a
unique solution to (2.215), and hence, the r equ ired semigroup property
s(t + τ, x
0
) = s(t, s(τ, x
0
)), t, τ ≥ 0, and the continuity of s(t, ·) on D,
t ≥ 0, hold. Alternatively, uniqueness of solutions in forward time along
NonlinearBook10pt November 20, 2007
102 CHAPTER 2
with the continuity of f(·) ensure that the solutions to (2.215) satisfy the
semigroup property and are continuous fu nctions of the initial conditions
x
0
∈ D even when f(·) is not Lipschitz continuous on D (see [96, Theorem
4.3, p. 59]). More generally, f (·) need not be continuous. In particular, if
f(·) is discontinuous bu t bounded and x(·) is the unique solution to (2.215)
in the sense of Filippov [118], then the required semigroup property along
with the continuous dependence of solutions on initial conditions hold [118].
Note that Theorem 2.41 implies that if p ∈ D is an ω-limit point of
a trajectory s(·, x) of (2.215), then all other points of the trajectory s(·, p)
of (2.215) through the point p are also ω-limit points of s(·, x), that is, if
p ∈ ω(x) th en O
+
p
⊂ ω(x). Furthermore, since every equilibrium point
x
e
∈ D of (2.215) satisfies s(t, x
e
) = x
e
for all t ∈ R, all equilibrium points
x
e
∈ D of (2.215) are th eir own α- and ω-limit sets. I f a traj ectory of
(2.215) possesses a unique ω-limit point x
e
, then it follows from Theorem
2.41 that since ω(x
e
) is invariant with respect to the flow s
t
of (2.215), x
e
is an equilibrium point of (2.215).
Next, we establish an important property of limit sets with orbit
closures.
Theorem 2.42. Consider th e nonlinear dynamical system G given by
(2.215) and let O
+
x
and O
−
x
denote, respectively, the positive and n egative
orbits of G through the point x ∈ D. Then O
+
x
= O
+
x
∪ ω(x) and O
−
x
=
O
−
x
∪ α(x).
Proof. Recall that O
+
x
= {y ∈ D : y = s(t, x), t ≥ 0}. Now, it follows
from the definition of ω(x) that O
+
x
⊇ O
+
x
∪ ω(x). To show that O
+
x
⊆
O
+
x
∪ ω(x), let z ∈ O
+
x
. In this case, there exists a sequence {z
n
}
∞
n=0
⊆ O
+
x
such that z
n
→ z as n → ∞. Next, let z
n
= s(t
n
, x) for t
n
∈ R
+
. Now, either
there exists a subsequence {t
n
k
}
∞
k=0
such that t
n
k
→ ∞ as k → ∞, in which
case z ∈ ω(x), or since R
+
is closed it follows from the Bolzano-Lebesgue
theorem (Theorem 2.4) that there exists a subsequence {t
n
k
}
∞
k=0
such that
t
n
k
→ t ∈ R
+
. In the second case, s(t
n
k
, x) → s(t, x) ∈ O
+
x
as k → ∞,
and since s(t
n
k
, x) → z as k → ∞ it follows that z = s(t, x) ∈ O
+
x
. Hence,
O
+
x
⊆ O
+
x
∪ ω(x). The proof of O
−
x
= O
−
x
∪ α(x) follows using identical
arguments.
The next definition introduces the notions of attracting sets and
attractors. For this definition recall that a n eighborhood N of a set M ⊂ D
is defin ed as N
△
= {x ∈ D : kx − yk < ε, y ∈ M} for some small ε > 0.
Definition 2.52. A closed invariant set M ⊂ D is an attracting set of
the dynamical s ys tem (2.215) if there exists a neighborhood N of M such
NonlinearBook10pt November 20, 2007
DYNAMICAL SYSTEMS AND DIFFERENTIAL EQUATIONS 103
that, for all x ∈ N, s
t
(x) ∈ N for all t ≥ 0 and s
t
(x) → M as t → ∞.
A set M ⊂ D is an attractor of the dynamical s ystem (2.215) if M is an
attracting set of (2.215) and contains a dense orbit.
Example 2.38. Consider the nonlinear d ynamical system
˙x
1
(t) = −x
2
(t) + x
1
(t)[1 − x
2
1
(t) −x
2
2
(t)], x
1
(0) = x
10
, t ≥ 0, (2.220)
˙x
2
(t) = x
1
(t) + x
2
(t)[1 −x
2
1
(t) −x
2
2
(t)], x
2
(0) = x
20
. (2.221)
Rewriting (2.220) and (2.221) in terms of the polar coordinates r =
p
x
2
1
+ x
2
2
and θ = tan
−1
(x
2
/x
1
) as
˙r(t) = r(t)[1 − r
2
(t)], r(0) = r
0
△
=
q
x
2
10
+ x
2
20
, t ≥ 0, (2.222)
˙
θ(t) = 1, θ(0) = θ
0
△
= tan
−1
(x
20
/x
10
), (2.223)
it can be shown that the set of equilibria f
−1
(0) consists of the origin x =
[x
1
x
2
]
T
= 0. All solutions of the system starting from nonzero initial
conditions x(0) that are not on the un it circle C = {x ∈ R
2
: x
2
1
+ x
2
2
=
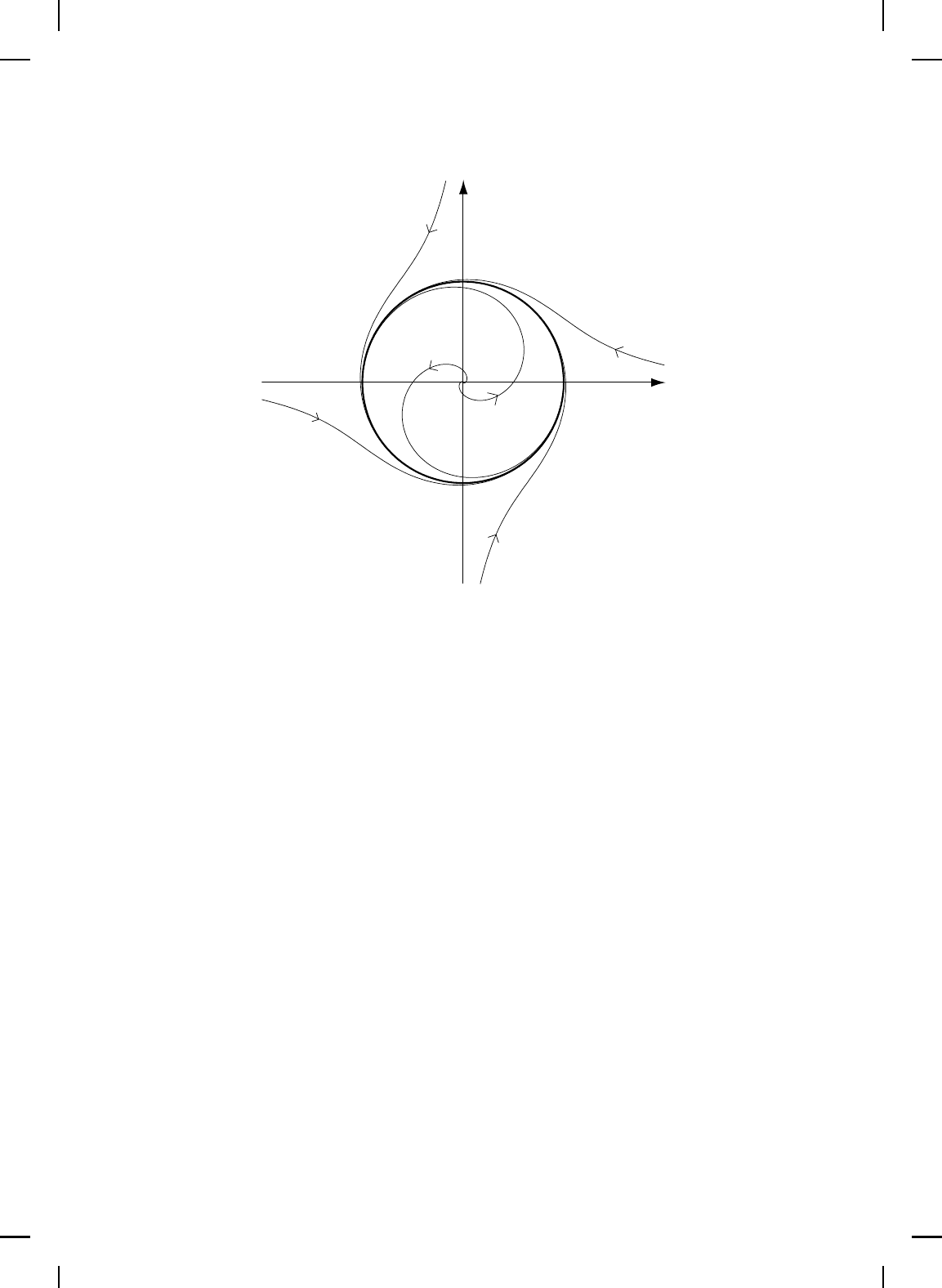
1} approach the unit circle. In particular, since ˙r > 0 for r ∈ (0, 1), all
solutions starting inside the unit circle spiral counterclockwise toward the
unit circle. Alternatively, since ˙r < 0 f or r > 1, all solutions starting outside
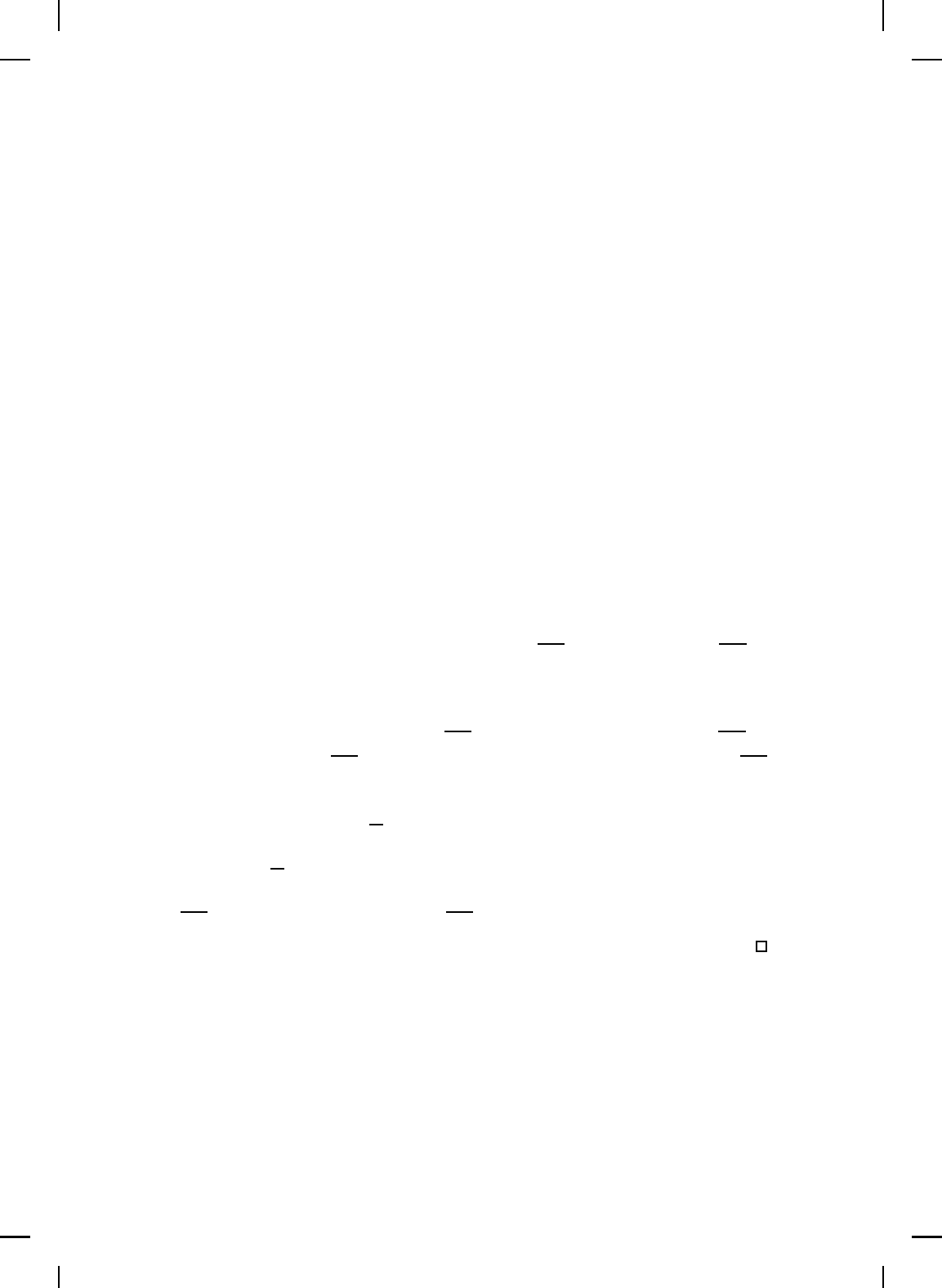
the unit circle spiral inward counterclockwise (see Figure 2.6). Hence, all
solutions to (2.220) and (2.221) are bounded and converge to C. Note that
the counterclockwise flow on the unit circle characterizes a trajectory O
+
x
0
of (2.220) and (2.222) since ˙r = 0 on r = 1. Furthermore, O
+
x
0
is the ω-
limit set of every trajectory of (2.220) and (2.221) with the exception of the
equilibrium point x = 0. Clearly, O
+
x
0
is an attractor.
Since the vector field (2.222) and (2.223) are Lipschitz continuous , the
solutions to (2.222) and (2.223) are unique and all solutions are defined on R.
The system trajectories of (2.222) and (2.223) are shown in Figure 2.6 and
consist of i) an equilibrium point corresponding to the origin, ii) a perio dic
trajectory coinciding with the limit cycle C (see Definition 2.54), and iii)
spiraling trajectories passing through each point p = (r, θ) with r 6= 0 and
r 6= 1. For points p such that r ∈ (0, 1), ω(r, θ) = C and α(r, θ) = {0}.
For points p such that r > 1, ω(r, θ) = C and α(r, θ) = Ø. For points
p such that r = 1, ω(r, θ) = α(r, θ) = C. Hence, ω(r, θ) = C ∪ {0} and
α(r, θ) = C ∪ {0} ∪ Ø = C ∪ {0}, (r, θ) ∈ R × R. △
2.13 Periodic Orbits, Limit Cycles, and Poincar´e-
Bendixson Theorems
In this s ection we discuss periodic orbits and limit cycles. In particular, we
present several key techniques for predicting the existence of periodic orbits
NonlinearBook10pt November 20, 2007
104 CHAPTER 2
x
1
x
2
1
−1
1
−1
Figure 2.6 Attractor for Example 2.38.
and limit cycles in nonlinear dynamical systems. Here we limit our attention
to planar (second-order) systems, whereas in Section 4.10 we address n-
dimensional periodic dynamical systems. Once again, we consider dynamical
systems of the form
˙x(t) = f (x(t)), x(0) = x
0
, t ∈ R, (2.224)
where x(t) ∈ D, t ∈ R, D is an open subset of R
n
, and f : D → R
n
is
Lipschitz continuous on D. The following definition introduces the notion
of periodic solutions and periodic orbits for (2.224).
Definition 2.53. A solution s(t, x
0
) of (2.224) is periodic if there exists
a finite time T > 0 such that s(t+T, x
0
) = s(t, x
0
) for all t ∈ R. The minimal
T for which the solution s(t, x
0
) of (2.224) is periodic is called the period. A
set O ⊂ D is a periodic orbit of (2.224) if O = {x ∈ D : x = s(t, x
0
), t ∈ R}
for some periodic solution s(t, x
0
) of (2.224).
Note that for every x ∈ D, s(t, x) has a period T = 0; however, s(t, x)
need not be periodic. Furtherm ore, if x
e
∈ D is an equilibrium point, then
every T ∈ R is a period of s(t, x
e
), and hence, s(t, x
e
) is periodic. Th e
next proposition gives a characterization of a periodic point of a n onlinear
dynamical system.