Haddad W.M. Nonlinear Dynamical Systems and Control: A Lyapunov-Based Approach
Подождите немного. Документ загружается.


NonlinearBook10pt November 20, 2007
DYNAMICAL SYSTEMS AND DIFFERENTIAL EQUATIONS 65
|||f |||
∞,q
△
= sup
t∈[0,∞)
kf(t)k
q
. (2.108)
Here, the vector norm (q part) is the spatial norm; the p part is the temporal
norm. Note that the norm ||| · |||
p,q
satisfies Axioms i) and iii) of Definition
2.39. However, since there exist many nonzero functions f : [0, ∞) → R
n
such that |||f |||
p,q
= 0, p ∈ [1, ∞), it f ollows that Axiom ii) of Definition 2.39
can be violated with the norm |||·|||
p,q
. Specifically, if f (·) is a fun ction such
that it is zero almost everywhere or, equivalently, f (·) is zero everyw here on
[0, ∞) except on a set of m easure zero [288], then f(·) satisfies |||f |||
p,q
= 0.
To address such functions the concepts of Lebesgue measure and measurable
spaces [288] can be used with the integral in (2.107) denoting the Lebesgue
integral. In this case, the function ||| · |||
p,q
is a valid norm on the s pace
of measurable fun ctions f : [0, ∞) → R
n
with the interpretation that if
|||f |||
p,q
= 0, then f (t) = 0 almost everywhere on [0, ∞). We denote this
normed linear space by L
p
or, equivalently, the set of measurable functions
such that |||f|||
p,q
< ∞, q ∈ [1, ∞], that is,
L
p
△
= {f : [0, ∞) → R
n
: f is measurable and |||f |||
p,q
< ∞, q ∈ [1, ∞]}.
In this case, |||f |||
∞,q
given by (2.108) is replaced by
|||f |||
∞,q
△
= ess sup
t∈[0,∞)
kf(t)k
q
, (2.109)
where “ess” denotes essential.
Example 2. 28. Let C[a, b] denote the set of continuous functions
mapping the bounded interval [a, b] into R
n
. Furthermore, for f, g ∈ C[a, b]
and α ∈ R, let (f + g)(t)
△
= f(t) + g(t) and (αf )(t) = αf(t). Now, define
the norm ||| · ||| : R
n
→ R by |||f |||
∞,q
= max
t∈[a,b]
kf(t)k
q
. Note that since
f is defined on the bounded interval [a, b] and f is continuous, ||| · ||| is a
well-defined norm and is finite f or every f (·) ∈ C[a, b]. Clearly, |||f|||
∞,q
≥ 0
and is zero only for f (t) ≡ 0. To show that Axioms iii) and iv) of Definition
2.39 hold note that for f(·), g(·) ∈ C[a, b] it follows that
|||f + g|||
∞,q
= max
t∈[a,b]
kf(t) + g(t)k
q
≤ max
t∈[a,b]
[kf(t)k
q
+ kg(t)k
q
]
= |||f|||
∞,q
+ |||g|||
∞,q
. (2.110)
Furth ermore,
|||αf |||
∞,q
= max
t∈[a,b]
kαf(t)k
q
= max
t∈[a,b]
|α|kf(t)k
q
= |α| max
t∈[a,b]
kf(t)k
q

NonlinearBook10pt November 20, 2007
66 CHAPTER 2
= |α||||f |||
∞,q
. (2.111)
Hence, C[a, b] endowed with th e n orm ||| · |||
∞,q
is a normed linear space. △
Note that in the above discussion we can also allow f : [0, ∞) → R
n×m
in a similar way where the spatial norm is a matrix norm. Furthermore, in
the matrix case, we can define induced norms for linear operators G : L
p
→
L
q
of the form y(t) = G[u](t). One such indu ced norm |||G|||
(q,s),(p,r)
is defin ed
by
|||G|||
(q,s),(p,r)
△
= sup
|||u|||
p,r
=1
|||G[u]|||
q,s
, (2.112)
which corresponds to an induced operator norm from an input signal u(t)
with p temporal norm and r spatial norm to an output signal y(t) with q
temporal norm and s spatial norm. For further details, see Chapter 7.
Some norm ed vector spaces are not large enough to permit limit
operations. In particular, if {f
n
}
∞
n=1
denotes a sequence of functions
belonging to a normed linear space such that lim
n→∞
|||f − f
n
||| = 0, then a
natural question is whether f is a member of the norm ed linear space. As an
example, consider the space of continuous functions on [0, 1] with the norm
defined by |||f ||| =
R
1
0
|f(t)|dt. Now, consider the sequence of continuous
functions
f
n
(t) =
1 − nt, t ∈ [0, 1/n),
0, t > 1/n,
(2.113)
and d efi ne f by
f(t) =
1, t = 0,
0, t > 0.
(2.114)
Then it can be easily seen th at lim
n→∞
|||f
n
− f||| = 0. However, the limit
f is not continuous, that is, f is not a member of the vector space. In
other words, our linear space was too small for the norm we defin ed on it.
In order to address the above observations we introduce the concept of a
Cauchy sequence.
Definition 2.43. A sequence {x
n
}
∞
n=1
in a normed linear space is called
a Cauchy sequence if, for every ε > 0, th ere exists an integer N = N(ε) such
that |||x
n
− x
m
||| < ε, whenever n, m > N.
Note that an equivalent condition for a Cauchy sequence is lim
n,m→∞
|||x
n
− x
m
||| = 0. Thus, the main difference between a convergent sequence
and a C auchy sequence is that in the former case the terms in the sequence
approach a limit point, wh ereas in the latter case the terms in the sequence
approach each other. The following proposition shows that every convergent
sequence in a n ormed linear space is a Cauchy sequence.
NonlinearBook10pt November 20, 2007
DYNAMICAL SYSTEMS AND DIFFERENTIAL EQUATIONS 67
Proposition 2.29. Assume that the sequence {x
n
}
∞
n=1
converges in a
normed linear space. Then for every ε > 0 there exists an integer N such
that |||x
n
− x
m
||| < ε whenever n > N and m > N .
Proof. Let x = lim
n→∞
x
n
. Given ε > 0, let N be such that |||x
n
−x||| <
ε/2, whenever n > N. Now, if m > N, then |||x
m
−x||| < ε/2. If n > N and
m > N it follows f rom the triangle inequ ality that
|||x
n
− x
m
||| = |||x
n
− x + x − x
m
||| ≤ |||x
n
− x||| + |||x − x
m
||| <
ε
2
+
ε
2
= ε.
Hence, {x
n
}
∞
n=1
is a Cauchy sequence.
Even though every convergent sequence is Cauchy, the converse is not
necessarily true in a normed linear space. In particular, if the elements of
a sequence get closer to each other, that does not imply that the sequence
is convergent. However, there exist normed linear s paces w here this is true.
These spaces are known as Banach spaces.
Definition 2.44. A n ormed linear space is called a complete space or
a Banach space if every Cauchy sequence converges to an element in the
space.
Example 2.29. Once again, we consider the set C[a, b] of continuous
functions mapping the boun ded interval [a, b] into R
n
addressed in Example
2.28. To show that C[a, b] is a Banach space let {f
n
}
∞
n=0
be a Cauchy
sequence in C[a, b]. Now, for every fixed t ∈ [a, b],
kf
n
(t) −f
m
(t)k
q
≤ |||f
n
− f
m
|||
∞,q
→ 0 as n, m → ∞, (2.115)
and hence the real vectors {f
n
(t)}
∞
n=0
form a Cauchy sequence in R
n
. Since
R
n
with k · k
q
, q ∈ [1, ∞], is a complete space [373] it follows that there
exists f (t) such that f
n
(t) → f(t) as n → ∞. To show that the sequence
{f
n
}
∞
n=0
converges to f uniform ly in t, let ε > 0 and choose N such that
|||f
n
−f
m
|||
∞,q
< ε/2 for all n, m > N . Now, let t ∈ [a, b] and let m > N such
that kf
m
(t) − f (t)k
q
< ε/2. Next, it f ollows from the triangle inequality
that for all n > N ,
kf
n
(t) −f(t)k
q
= kf
n
(t) −f
m
(t) + f
m
(t) −f(t)k
q
≤ kf
n
(t) −f
m
(t)k
q
+ kf
m
(t) −f(t)k
q
≤ |||f
n
− f
m
|||
∞,q
+ kf
m
(t) −f(t)k
q
< ε. (2.116)
Hence, since t ∈ [a, b] is arbitrary, it follows that {f
n
}
∞
n=0
converges to f
uniformly in t. Now, since f
n
(·) is continuous and convergence is uniform,
the limit function f(·) is also continuous.

NonlinearBook10pt November 20, 2007
68 CHAPTER 2
To see this, let t
0
∈ [a, b] be an arbitrary time in [a, b]. Since the
convergence of {f
n
}
∞
n=0
is uniform , given ε > 0, there exists suffi ciently
large n such that
kf
n
(t) − f(t)k
q
< ε/3, t ∈ [a, b]. (2.117)
However, f
n
(t) is continuous at t
0
, and hence, there exists some δ > 0 such
that
kf
n
(t) −f
n
(t
0
)k
q
< ε/3 (2.118)
whenever |t − t
0
| < δ. Thus, if |t − t
0
| < δ, it follows that
kf(t) −f (t
0
)k
q
= kf(t) − f
n
(t) + f
n
(t) −f
n
(t
0
) + f
n
(t
0
) − f(t
0
)k
q
≤ kf(t) − f
n
(t)k
q
+ kf
n
(t) −f
n
(t
0
)k
q
+ kf
n
(t
0
) − f(t
0
)k
q
< ε/3 + ε/3 + ε/3
= ε, (2.119)
which shows that f is continuous at t
0
. Now, since t
0
is an arbitrary point
in [a, b], it follows that f is continuous on [a, b]. Hence, since a sequence
of fu nctions {f
n
}
∞
n=0
in C[a, b] converges to a function f (·) ∈ C[a, b] if and
only if {f
n
(t)}
∞
n=0
converges to f(t) uniformly on [a, b], it follows that C[a, b]
endowed with the norm ||| ·|||
∞,q
is a Banach space. △
We close this section with a very important theorem from mathemat-
ical analysis needed to derive existence and uniqu en ess results for nonlinear
differential equations. T he theorem is known as the contraction mapping
theorem or the Banach fixed point theorem. The following defi nition is
needed for this r esult.
Definition 2.45. Let V be a linear vector space and let T : V → V.
The point x
∗
∈ V is a fixed point of T (·) if T (x
∗
) = x
∗
.
Theorem 2.21 (Bana ch Fixed Point Theorem). Let X be a Banach
space with norm ||| · ||| : X → R and let T : X → X. Suppose there exists a
constant ρ ∈ [0, 1) s uch that
|||T (x) − T (y)||| ≤ ρ|||x − y|||, x, y ∈ X. (2.120)
Then there exists a unique x
∗
∈ X such that T (x
∗
) = x
∗
. Furthermore, for
each x
0
∈ X, the sequence {x
n
}
∞
n=0
⊂ X d efi ned by
x
n+1
= T (x
n
) (2.121)
converges to x
∗
. Finally,
|||x
∗
− x
n
||| ≤
ρ
n
1 − ρ
|||T (x
0
) −x
0
|||, n ≥ 0. (2.122)
Proof. Let x
0
∈ X be arbitrary and define the sequence {x
n
}
∞
n=0
by
NonlinearBook10pt November 20, 2007
DYNAMICAL SYSTEMS AND DIFFERENTIAL EQUATIONS 69
x
n+1
= T (x
n
). Now, for each n ≥ 0 it f ollows from (2.120) that
|||x
n+1
− x
n
||| = |||T (x
n
) − T (x
n−1
)|||
≤ ρ|||x
n
− x
n−1
|||
= ρ|||T (x
n−1
) − T (x
n−2
)|||
≤ ρ
2
|||x
n−1
− x
n−2
|||
.
.
.
≤ ρ
n
|||x
1
− x
0
|||
= ρ
n
|||T (x
0
) −x
0
|||. (2.123)
Next, let m = n + r, r ≥ 0, be given. Then (2.123) implies that
|||x
m
− x
n
||| = |||x
n+r
− x
n
|||
= |||x
n+r
− x
n+r−1
+ x
n+r−1
− x
n+r−2
+ ··· + x
n+1
− x
n
|||
≤ |||x
n+r
− x
n+r−1
||| + |||x
n+r−1
− x
n+r−2
||| + ··· + |||x
n+1
− x
n
|||
≤ (ρ
n+r−1
+ ρ
n+r−2
+ ··· + ρ
n
)|||x
1
− x
0
|||
=
ρ
n
(1 − ρ
r
)
1 −ρ
|||T (x
0
) − x
0
|||. (2.124)
Now, since ρ < 1, ρ
n
→ 0 as n → ∞. Hence, given ε > 0 and choosing a
large enough N, it follows th at |||x
m
− x
n
||| < ε for all m > n ≥ N. This
proves that the sequence {x
n
}
∞
n=0
is Cauchy. Furthermore, since X is a
Banach space, the sequence converges to an element x
∗
∈ X. Noting that
T (·) is a un iform ly continuous function, it follows that
T (x
∗
) = T ( lim
n→∞
x
n
) = lim
n→∞
T (x
n
) = lim
n→∞
x
n+1
= x
∗
, (2.125)
and h en ce, x
∗
is a fixed point.
Next, suppose, ad absurdum, that x
∗
is not unique. That is, s uppose
there exists x ∈ X, x 6= x
∗
, s uch that T (x) = x. Then, it follows from
(2.120) that
|||x
∗
−x||| = |||T (x
∗
) −T (x)||| ≤ ρ|||x
∗
− x|||. (2.126)
Since ρ < 1, (2.126) holds only if |||x
∗
− x||| = 0, and hence, x
∗
= x leading
to a contradiction. Thus, x
∗
is a unique fix ed point.
Finally, to show (2.122), let r → ∞ in (2.124) and recall that ||| · ||| :
X → R is continuous on X (see Problem 2.86) so that
|||x
∗
− x
n
||| = ||| lim
r→∞
x
n+r
− x
n
|||
= lim
r→∞
|||x
n+r
− x
n
|||
≤ lim
r→∞
ρ
n
(1 − ρ
r
)
1 −ρ
|||T (x
0
) − x
0
|||
NonlinearBook10pt November 20, 2007
70 CHAPTER 2
=
ρ
n
1 −ρ
|||T (x
0
) − x
0
|||, (2.127)
where the last inequality in (2.127) follows from the fact that ρ < 1.
It is important to note that it is not possible to replace (2.120) with
the weaker hypothesis
|||T (x) − T (y)||| < |||x −y|||, x, y ∈ X. (2.128)
See Problem 2.91. Finally, we give a slightly different version of Theorem
2.21 for the case where T m ap s a closed subset S of X into itself. This
version of the theorem is useful in applications.
Theorem 2.22. Let X be a Banach space with norm ||| · ||| : X → R,
let S be a closed subset of X, and let T : S → S. Suppose there exists a
constant ρ ∈ [0, 1) s uch that
|||T (x) −T (y)||| ≤ ρ|||x − y|||, x, y ∈ S. (2.129)
Then there exists a un ique x
∗
∈ S such that T (x
∗
) = x
∗
. Furthermore, for
each x
0
∈ S, the sequence {x
n
}
∞
n=0
⊂ S defined by x
n+1
= T (x
n
) converges
to x
∗
. Finally,
|||x
∗
− x
n
||| ≤
ρ
n
1 − ρ
|||T (x
0
) −x
0
|||, n ≥ 0. (2.130)
Proof. The fact that S is closed guarantees that x
∗
∈ S. Now, the
proof is identical to the proof of Theorem 2.21.
Finally, we present a key result connecting continuity and boun dedness
of a linear operator defined on normed linear spaces. First, however, the
following definition is needed.
Definition 2.46. Let X and Y be normed linear spaces with norms
||| ·||| : X → R and |||· |||
′
: Y → R. A linear operator T : X → Y is bounded if
there exists α ≥ 0 such that |||T x|||
′
≤ α|||x||| for all x ∈ X.
Theorem 2.23. Let X and Y be normed linear spaces with norms
||| · ||| : X → R and ||| · |||
′
: Y → R, and let T : X → Y be a linear operator.
Then T is uniformly continuous on X if and only if T is bounded on X.
Proof. Assume T (·) is boun ded. Since T (·) is a linear operator, it
follows that
|||T (x) − T (y)|||
′
= |||T x − T y|||
′
= |||T (x − y)|||
′
≤ α|||x − y|||
for all x, y ∈ X and some α ≥ 0. Now, choosing δ = ε/α, it follows that
given ε > 0 there exists δ = δ(ε) such that |||T (x)−T (y)|||
′
< ε for all x, y ∈ X
NonlinearBook10pt November 20, 2007
DYNAMICAL SYSTEMS AND DIFFERENTIAL EQUATIONS 71
satisfying |||x − y||| < δ. Hence, T (·) is uniformly continuous on X.
Conversely, assume T (·) is uniformly continuous on X. Then T (·) is
continuous at x = 0. Hence, given ε > 0 there exists δ = δ(ε) such that
|||x||| ≤ ε implies |||T (x)|||
′
= |||T x|||
′
≤ δ. Next, f or x ∈ X, x 6= 0, let y = βx,
where β = ε/|||x|||. Now, since |||y||| = |||βx||| = ε it follows that |||T y|||
′
≤ δ.
Hence,
|||T y|||
′
= |||T βx|||
′
= β|||T x|||
′
= ε
|||T x|||
′
|||x|||
≤ δ,
which implies that
|||T x|||
′
≤
δ
ε
|||x|||,
and h en ce, T (·) is bounded on X.
2.6 Dynamical Systems, Flows, and Vector Fields
As discussed in Chapter 1, a system is a combination of components or parts
which is perceived as a s ingle entity. T he parts making up the system are
typically clearly defined with a particular set of variables, called the states
of the system, that completely determine the behavior of the system at a
given time. Hence, a dynamical system consists of a set of possible states in
a given space, together with a rule that determines the present state of the
system in terms of past states. Thus, a dynamical system on D ⊆ R
n
tells
us for a specific time t = t
0
and state x in the space D where the system
state x will be at time t ≥ t
0
. In this book, we view a dynamical system
as a precise mathematical object defined on a time interval as a mapping
between vector spaces satisfying a set of axioms. For this defi nition D is an
open s ubset of R
n
.
Definition 2.47. A dynamical system on D is the triple (D, R, s),
where s : R × D → D is such that the following axioms hold:
i) (Continuity): s(·, ·) is continuous on D×R and for every t ∈ R, s(·, x)
is continuously differentiable on D.
ii) (Con s istency): s(0, x
0
) = x
0
for all x
0
∈ D.
iii) (Group property): s(τ, s(t, x
0
)) = s(t + τ, x
0
) for all x
0
∈ D and
t, τ ∈ R.
Henceforth, we denote the dynamical system (D, R, s) by G and we
refer to the m ap s(·, ·) as the flow or trajectory of G corresponding to x
0
∈ D,
and for a given s(t, x
0
), t ≥ 0, we refer to x
0
∈ D as an initial condition of G.
Given t ∈ R we denote the map s(t, ·) : D → D by s
t
(x
0
) or s
t
. Hence, for
NonlinearBook10pt November 20, 2007
72 CHAPTER 2
t ∈ R the set of mappings defined by s
t
(x
0
) = s(t, x
0
) for every x
0
∈ D give
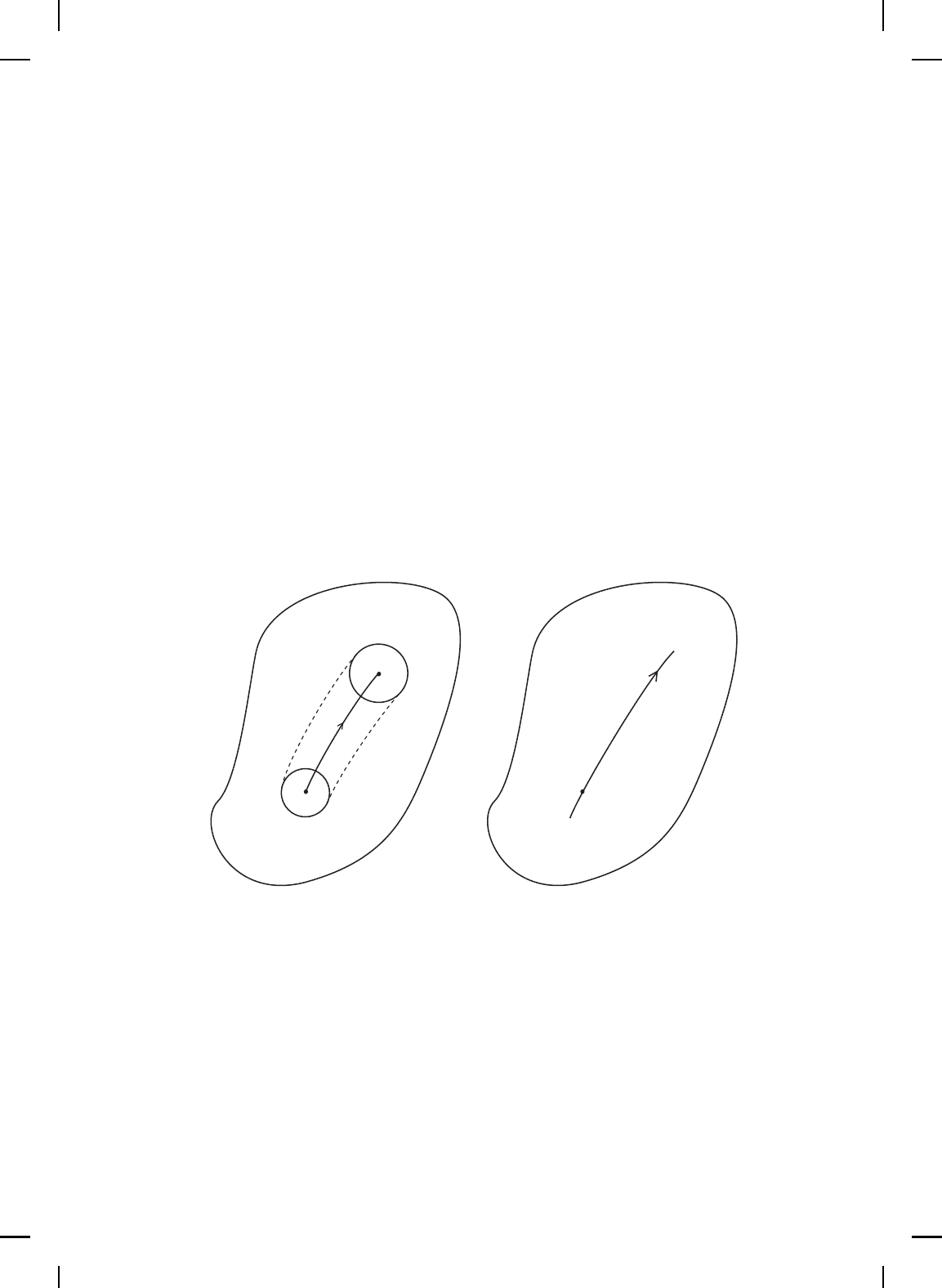
the flow of G. In particular, if D
0
is a collection of initial conditions s uch
that D
0
⊂ D, th en the flow s
t
: D
0
→ D is nothing more than the motion of
all points x
0
∈ D
0
or, equivalently, the image of D
0
⊂ D under the flow s
t
,
that is, s
t
(D
0
) ⊂ D (see Figure 2.3(a)). Alternatively, if the in itial condition
x
0
∈ D is fixed and we let [α, β] ⊂ R, then the mapping s(·, x
0
) : [α, β] → D
defines the solution curve or trajectory of the dynamical system G. Hence,
the mapping s(·, x
0
) generates a graph in [α, β]×D identifying the trajectory
corresponding to motion along a curve C through the point x
0
in a subset
D of the state space (see Figure 2.3(b)). Given x ∈ D we denote the map
s(·, x) : R → D by s
x
(t) or s
x
.
If we think of a dynamical system G as describin g the motion of a fluid,
then the flow of G describes the motion of the entire fluid and is consistent
with an Eulerian description of the dynamical system wherein the motion
is analyzed over a continuous medium (control volume). Alternatively, the
trajectory of G describes the motion of an individual particle in the flu id
and is consistent with a Lagrangian formulation of the dynamical system
which describes the motion (position) of a particle as a function of time.
DD
D
0
x
0
x
0
s
t
(x
0
)
s
t
(D
0
)
s(·, x
0
)
C
(a)
(b)
Figure 2.3 (a) Flow of a dynamical system. (b) Solution curve of a dynamical system.
In terms of the map s
t
: D → D Axioms ii) and iii) can be equivalently
written as ii)
′
s
0
(x
0
) = x
0
and iii)
′
(s
τ
◦ s
t
)(x
0
) = s
τ
(s
t
(x
0
)) = s
t+τ
(x
0
).
Note that it follows from i) and iii) that the map s
t
: D → D is a continuous
function with a continuous inverse s
−t
. Thus, s
t
with t ∈ R generates a one-
parameter family of homeomorphisms on D forming a commutative group
under composition. To see that s
t
is one-to-one note that if s(t, y) = s(t, z),
NonlinearBook10pt November 20, 2007
DYNAMICAL SYSTEMS AND DIFFERENTIAL EQUATIONS 73
then y = z follows from
y = s(0, y)
= s(−t + t, y)
= s(−t, s(t, y))
= s(−t, s(t, z))
= s(−t + t, z)
= s(0, z)
= z. (2.131)
Also note that if y ∈ D, then s
t
(x) = y for x = s(−t, y), and hence, s
t
is
onto. Finally, to see that s
t
has a continuous inverse we need only show that
s
−t
is the inverse of s
t
. To see this, note that for any two flows s
t
and s
τ
,
s
t
◦ s
τ
= s
t+τ
since, for every x ∈ D,
(s
t
◦ s
τ
)(x) = s
t
(s
τ
(x)) = s
t
(s(τ, x)) = s(t + τ, x) = s
t+τ
(x). (2.132)
In addition, note that for every x ∈ D, s
0
(x) = s(0, x) = x is the identity
operator on D. Hence, s
−t
◦s
t
= s
t−t
= s
0
, which establishes that s
−t
is the
inverse of s
t
.
Since a dynamical system G involves the function s(·, ·) describing the
motion of x ∈ D for all t ∈ R, it generates a differential equation on D. In
particular, the function f : D → R
n
given by
f(x)
△
=
d
dt
s(t, x)
t=0
(2.133)
defines a continuous vector field on D. For x ∈ D, f(x) belongs to R
n
and
corresponds to the tangent vector to the curve s
t
(x) at t = 0. Hence, for
s
t
: D → D satisfying Axioms i)–iii) of Definition 2.47, letting x(t) = s(t, x
0
)
and d efi ning f : D → R
n
as in (2.133) it follows that
˙x(t) = f(x(t)), x(0) = x
0
, t ∈ R. (2.134)
In this book, we use the notation s(t, x
0
), t ∈ R, and x(t), t ∈ R,
interchangeably to den ote the solution of the nonlinear dynamical system
(2.134) with initial condition x(0) = x
0
. Even though for physical dynamical
systems t ≥ 0, in this chapter we allow t ∈ R in order to d evelop general
analysis results for (2.134) possessing reversible flows. In the later chapters
we consider dynamical systems on the semi-infinite interval [0, ∞).
Example 2.30. In this examp le we analyze the solution curves and flow
of a linear system. S pecifically, define s : [0, ∞)×R
n
→ R
n
by s(t, x) = e
At
x,
where A ∈ R
n×n
. Hence, s
t
: R
n
→ R
n
is represented by e
At
∈ R
n×n
so that
s
t
(x) = e
At
x. Note th at since e
0
n×n
= I
n
and e
A(t+τ)
= e
At
e
Aτ
it follows
that s
0
(x
0
) = x
0
and (s
τ
◦ s
t
)(x
0
) = s
τ
(s
t
(x
0
)) = e
Aτ
e
At
x
0
, and h en ce,
NonlinearBook10pt November 20, 2007
74 CHAPTER 2
Axioms ii) and iii) of Definition 2.47 are satisfied. Axiom i) is trivially
satisfied. Now, for a given time t, if x ∈ R
n
the flow s
t
(x) is the image
e
At
x of x and is given by e
At
x =
P
n
n=1
x
(i)
col
i
(e
At
), where col
i
(e
At
) denotes
the ith column of e
At
. Hence, the flow is given by R(e
At
)
△
= {y ∈ R
n
:
y = e
At
x for some x ∈ R
n
} ⊆ R
n
for each fixed time. Alternatively, given
x
0
∈ D, s
x
0
: [0, ∞ ) → R
n
defines the system trajectory. Hence, s
x
0
(·) is
represented by e
At
x
0
: [0, ∞) → R
n
so that s
x
0
= e
At
x
0
. Finally, to show
that s(t, x) = e
At
x generates a linear differential equation on R
n
note that
f(x) =
d
dt
s(t, x)|
t=0
=
d
dt
e
At
x|
t=0
= Ax. Hence, with x(t) = s(t, x
0
) it
follows that
˙x(t) = Ax(t), x(0) = x
0
, t ≥ 0, (2.135)
which defines a linear, time-invariant dynamical system. △
2.7 Nonlinear Differential Equations
In Section 2.6 we saw that a nonlinear dynamical system G as defined
by Definition 2.47 gives rise to a nonlinear differential equation. In this
section, we present several general r esults on nonlinear dynamical systems
characterized by d ifferential equations of the form
˙x(t) = f (x(t)), x(t
0
) = x
0
, t ∈ I
x
0
, (2.136)
where x(t) ∈ D, t ∈ I
x
0
, D is an open s ubset of R
n
with 0 ∈ D, f : D → R
n
is
continuous on D, and I
x
0
= (τ
min
, τ
max
) is the maximal interval of existence
for the solution x(·) of (2.136). A continuously differentiable function x :
I
x
0
→ D is said to be a solution to (2.136) on the interval I
x
0
⊆ R with
initial condition x(t
0
) = x
0
, if x(t) satisfies (2.136) for all t ∈ I
x
0
. Unlike
linear differential equations, the existence and uniqueness of solutions of
(2.136) are not guaranteed. In addition, a solution may only exist on some
proper subinterval (τ
min
, τ
max
) ⊂ R (maximal interval of existence). Note
that if x(·) is a solution to (2.136) and f : D → R
n
is continuous, then x(·)
satisfies the integral equation
x(t) = x
0
+
Z
t
t
0
f(x(s))ds, t ∈ I
x
0
. (2.137)
Conversely, if x(·) is continuous on I
x
0
and s atisfies (2.137), then x(·) is
continuously differentiable on I
x
0
and satisfies (2.136). Hence, (2.136) and
(2.137) are equivalent in the sense that x(·) is a solution to (2.136) if and
only if x(·) is a solution to (2.137).
Since the existence and uniqueness of solutions for nonlinear differen-
tial equations are not always guaranteed, in this and the next section we
address the following questions: