Greenwood D.T. Advanced Dynamics
Подождите немного. Документ загружается.

269 Constraints and energy rates
where
γ
j
r
=
n
i=1
n
k=1
∂
ji
∂q
k
−
∂
jk
∂q
i
kt
ir
+
n
i=1
∂
ji
∂t
−
∂
jt
∂q
i
ir
(4.395)
It appears that, in the general nonholonomic case, the left-hand side of (4.394) is easier to
evaluate that is its right-hand side. Thus, (4.380) is more direct than (4.393) in the general
case.
From (4.380), we see that sufficient conditions for a conservative system, implying a
constant value of E,are:
1. Q
j
= 0 for all j, that is, all the generalized forces Q
j
are derivable from a potential
energy function of the form V (q).
2. The functions
kt
, p
i
· ˙γ
it
, and H
ci
·
˙
β
it
are all continuously equal to zero.
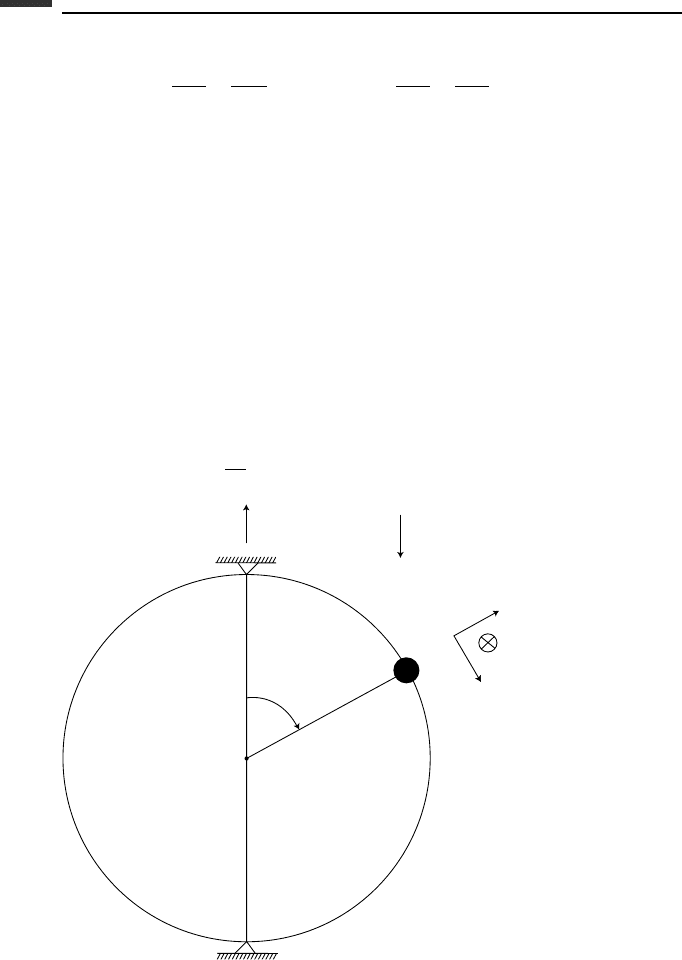
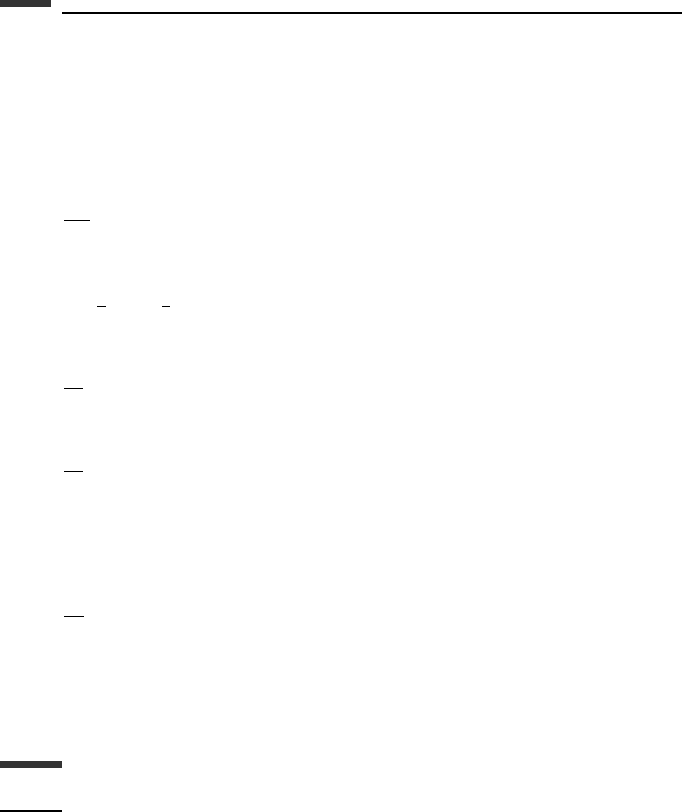
Example 4.12 A particle of mass m can slide on a wire in the form of a circle of radius r
which rotates about a vertical diameter with a variable angular velocity (t) (Fig. 4.8). We
wish to determine the energy rate
˙
E.
This is a rheonomic holonomic system with one generalized coordinate and no constraints.
Lagrange’s equation applies and (4.355) reduces to
˙
E =
˙
T
2
−
˙
T
0
+
˙
V =−
∂ L
∂t
(4.396)
O
θ
r
m
g
e
θ
e
φ
e
r
Ω (t)
Figure 4.8.
270 Equations of motion: differential approach
We see that
T =
1
2
mr
2
(
˙
θ
2
+
2
sin
2
θ) (4.397)
V = mgr cos θ (4.398)
Thus, we obtain
˙
E =−
∂T
∂t
=−mr
2
˙
sin
2
θ (4.399)
For the particular case in which is constant, we see that E = T
2
− T
0
+ V has a constant
value and the system is conservative. The total energy T + V is not constant, however,
because there is a torque about the vertical axis that is required to keep the angular velocity
constant even though θ is varying.
If we use the Boltzmann–Hamel approach, as given in (4.393), the same result occurs.
Here we can take u
1
=
˙
θ and note that both
it
and γ
j
r
vanish.
Finally, if we use the general energy rate expression in (4.379), we find that it reduces to
˙
E =−mv
1
· ˙γ
1t
(4.400)
where
v
1
= r
˙
θe
θ
+r sin θ e
φ
(4.401)
γ
1t
= r sin θ e
φ
(4.402)
Now
˙
e
φ
= Ω × e
φ
=− sin θ e
r
− cos θ e
θ
(4.403)
so
˙γ
1t
=−r
2
sin
2
θ e
r
−r
2
sin θ cos θ e
θ
+r(
˙
sin θ +
˙
θ cos θ )e
φ
(4.404)
Thus, (4.400) results in
˙
E =−mr
2
˙
sin
2
θ (4.405)
in agreement with our earlier results.
One can check the energy rate by first noting that
˙
T
2
= mr
2
˙
θ
¨
θ (4.406)
˙
T
0
= mr
2
2
˙
θ sin θ cos θ + mr
2
˙
sin
2
θ (4.407)
˙
V =−mgr
˙
θ sin θ (4.408)
The equation of motion, obtained from Lagrange’s equation, is
mr
2
¨
θ − mr
2
2
sin θ cos θ − mgr sin θ = 0 (4.409)
Substitute the expression for mr
2
¨
θ from (4.409) into (4.406). Then we find that
˙
E =
˙
T
2
−
˙
T
0
+
˙
V =−mr
2
˙
sin
2
θ (4.410)
271 Constraints and energy rates
x
m
e
n
e
t
m
l
φ
(x, y)
v
Ωt
1
2
y
Figure 4.9.
which checks with (4.405).
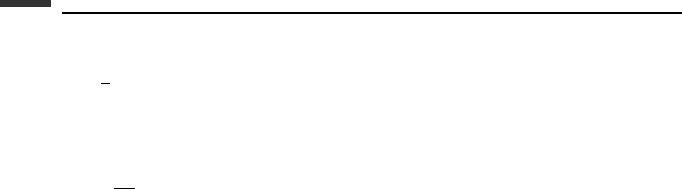
Example 4.13 A rheonomic nonholonomic system consists of two particles, each of mass
m which are connected by a massless rod of length l, as shown in Fig. 4.9. Particle 1 has
a nonholonomic constraint in the form of a knife-edge which rotates at a constant rate
relative to the rod. Let us choose (x , y,φ)asqs, and let
u
1
= v, u
2
=
˙
φ (4.411)
where v is a quasi-velocity. We wish to find the differential equations of motion and to
evaluate the energy rate
˙
E.
First, the differential equations of motion are obtained from the fundamental equation
for a system of particles, namely,
d
dt
∂T
∂u
j
−
N
i=1
m
i
v
i
· ˙γ
ij
= Q
j
(4.412)
Assume that the xy-plane is horizontal. The only constraint force is perpendicular to the knife
edge and does no work in an arbitrary virtual displacement. Therefore, each generalized
applied force Q
j
is zero. The velocities of the two particles are
v
1
= ve
t
, v
2
= (v + l
˙
φ sin t)e
t
+l
˙
φ cos t e
n
(4.413)
Thus, the constrained kinetic energy is
T =
1
2
m
v
2
1
+ v
2
2
=
1
2
m(2v
2
+l
2
˙
φ
2
+ 2lv
˙
φ sin t) (4.414)
The velocity coefficients are
γ
ij
=
∂v
i
∂u
j
(4.415)
272 Equations of motion: differential approach
resulting in
γ
11
= e
t
, γ
12
= 0, γ
21
= e
t
, γ
22
= l(sin t e
t
+ cos t e
n
) (4.416)
Also, we note that the γ
it
coefficients are equal to zero.
A differentiation of (4.416) with respect to time results in
˙γ
12
= 0, ˙γ
11
= ˙γ
21
= (
˙
φ + )e
n
, ˙γ
22
= l
˙
φ(−cos t e
t
+ sin t e
n
) (4.417)
where we note that e
t
and e
n
rotate counterclockwise with an angular velocity (
˙
φ + ).
The u
1
equation is obtained by first evaluating
d
dt
∂T
∂v
= 2m ˙v + ml
¨
φ sin t + ml
˙
φ cos t (4.418)
In addition, we find that
m(v
1
· ˙γ
11
+ v
2
· ˙γ
21
) = ml
˙
φ(
˙
φ + ) cos t (4.419)
Then, using (4.412), the first equation of motion is
2m ˙v + ml
¨
φ sin t − ml
˙
φ
2
cos t = 0 (4.420)
In a similar manner, we obtain
d
dt
∂T
∂
˙
φ
= ml
2
¨
φ + ml ˙v sin t + mlv cos t
(4.421)
m(v
1
· ˙γ
12
+ v
2
· ˙γ
22
) =−mlv
˙
φ cos t (4.422)
The second equation of motion is
ml
2
¨
φ + ml ˙v sin t + mlv(
˙
φ + ) cos t = 0 (4.423)
These two equations of motion constitute a minimum set for this system which has two
degrees of freedom.
Equation (4.420) can be interpreted as stating that the rate of change of linear momentum
in the direction of the knife edge is equal to zero. The second equation of motion, (4.423),
states that, if particle 1 is chosen as a noninertial reference point, the rate of change of
angular momentum is equal to the inertial moment due to the acceleration of particle 1.
Thus, it is convenient to think in terms of an accelerating but nonrotating reference frame
in this instance.
The energy rate
˙
E for a system of N particles can be written in the form
˙
E =
n−m
r=1
Q
r
u
r
+
∂V
∂t
+
n
k=1
∂V
∂q
k
kt
−
N
i=1
m
i
v
i
· ˙γ
it
(4.424)
in accordance with (4.379). We find that Q
r
, V ,
kt
and γ
it
are all equal to zero, so
˙
E = 0.
Thus, the energy function E, which in this case is the total kinetic energy, is constant during
the motion.
This is an example of a system for which the kinetic energy is an explicit function of
time and yet it is conservative.

273 Constraints and energy rates
Second method If the Lagrangian method is used, we have three differential equations
of motion involving Lagrange multipliers. Also, there is the nonholonomic constraint
equation
−
˙
x sin(φ + t) +
˙
y cos(φ + t ) = 0 (4.425)
which states that the velocity of particle 1 normal to the knife edge is zero.
The kinetic energy of the unconstrained system is
T =
1
2
m[2
˙
x
2
+ 2
˙
y
2
+l
2
˙
φ
2
+ 2l
˙
φ(−
˙
x sin φ +
˙
y cos φ)] (4.426)
We note that T is not an explicit function of time, and we can take the potential energy
function V equal to zero; hence ∂ L/∂t = 0. Furthermore, the nonholonomic constraint
is homogeneous and linear in the
˙
qs, and is therefore conservative. Thus, the sufficient
conditions for a conservative system are satisfied, implying, in this case, that the total
kinetic energy is a constant of the motion.
Third method Let us use the Boltzmann–Hamel approach. The equations for a complete
setofthreeus in terms of
˙
qsare
u
1
= v =
˙
x cos(φ + t) +
˙
y sin(φ + t) (4.427)
u
2
=
˙
φ (4.428)
u
3
=−
˙
x sin(φ + t) +
˙
y cos(φ + t ) (4.429)
The nonholonomic constraint is applied by setting u
3
equal to zero.
The unconstrained kinetic energy is
T = m
u
2
1
+
1
2
l
2
u
2
2
+ u
2
3
+lu
2
(u
1
sin t +u
3
cos t)
(4.430)
and the general Boltzmann–Hamel equation (4.85) reduces to
d
dt
∂T
∂u
r
+
3
j=1
2
l=1
∂T
∂u
j
γ
j
rl
u
l
+
3
j=1
∂T
∂u
j
γ
j
r
= 0(r = 1, 2) (4.431)
In evaluating γ
j
rl
and γ
j
r
, we note that the
ji
coefficients are explicit functions of time, in
general, but all the
jt
coefficients vanish, as well as the
kt
.
After a rather lengthy calculation, the equations of motion found earlier in (4.420) and
(4.423) are obtained. The Boltzmann–Hamel energy rate expression in (4.393) reduces for
this example to
˙
E =−
∂T
∂t
−
3
j=1
2
r=1
∂T
∂u
j
γ
j
r
u
r
(4.432)
We find that
∂T
∂t
= mlv
˙
φ cos t (4.433)
274 Equations of motion: differential approach
and
3
j=1
2
r=1
∂T
∂u
j
γ
j
r
u
r
=−mlv
˙
φ cos t (4.434)
Hence,
˙
E = 0 and E = T is a constant of the motion even though T is an explicit function
of time. Note that the kinetic energy is a homogeneous quadratic function of the us.
Comparing the three methods which were presented for analyzing this rheonomic non-
holonomic system, the first method using the fundamental dynamical equation for a system
of particles would seem to be preferable. It provides a minimum set of equations of motion
without Lagrange multipliers. Furthermore, the energy rate is found to be zero by inspection.
4.8 Summary of differential methods
In the study of differential methods in the dynamics of systems of particles or rigid bod-
ies, it is well to begin with Newton’s law of motion. Angular momentum methods can
also be employed, resulting in Euler’s equations for the rotational motion of rigid bod-
ies. These elementary approaches frequently require the introduction of constraint forces
and moments as additional variables in the dynamical equations, thereby complicating the
analysis.
Lagrange’s equations, when applied to holonomic systems with independent qs, result
in a minimum set of equations of motion without the necessity of solving for constraint
forces. In other words, although one set of qs may be subject to holonomic constraints,
another set of qs can be found which are independent and are consistent with the previous
constraints. No generalized constraint forces enter into the Lagrange equations of motion
for this system.
On the other hand, if there are nonholonomic constraints, then more qs are required than
the number of degrees of freedom. The use of the Lagrangian procedure involves Lagrange
multipliers which are associated with generalized constraint forces. If there are nqs and m
constraint equations, one obtains n second-order dynamical equations in addition to the m
constraint equations.
The use of Maggi’s equation eliminates the Lagrange multipliers and results in (n − m)
second-order equations of motion plus the m constraint equations. The Lagrange and Maggi
methods have the disadvantages, however, that the kinetic energy cannot be written in terms
of quasi-velocities, and must be written for the unconstrained system.
In the efficient representation of dynamical systems, it is desirable to obtain a minimal
setof(n − m) first-order differential equations of motion. This is possible in the general
nonholonomic case if one uses independent quasi-velocities as velocity variables. The
remaining four differential methods discussed in this chapter all result in a minimal set of
dynamical equations. The use of the Boltzmann–Hamel equation is the most complicated of
these methods and requires that the kinetic energy be written for the unconstrained system
having n degrees of freedom. The other three methods allow one to assume a constrained
system with (n − m) degrees of freedom from the beginning.
275 Summary of differential methods
Energy rate expressions can be obtained in several forms, depending upon the type of
dynamical equations used in their derivation. Each of these expressions can be used to obtain
a set of sufficient conditions for a conservative system, that is, a system having a constant
energy function E. In the usual case, E = T
2
− T
0
+ V rather than the total energy T + V .
If the equations of motion for a given system are being integrated numerically, the energy
rate
˙
E can be used as a check on the calculations. This is accomplished by integrating
˙
E
separately with respect to time, and comparing the change in the energy E with that obtained
from the integrated solutions to the equations of motion.
A note on quasi-velocities
We have defined quasi-velocities (us) in accordance with the equations
u
j
=
n
i=1
ji
(q, t)
˙
q
i
+
jt
(q, t)(j = 1,...,n) (4.435)
where the right-hand sides are not integrable, in general. Moreover, we assumed that these
equations can be solved for the
˙
qs, resulting in
˙
q
i
=
n
j=1
ij
(q, t)u
j
+
it
(q, t)(i = 1,...,n) (4.436)
Thus, we have assumed that the us and
˙
qs are related linearly. If there are m linear non-
holonomic constraints, these are represented by setting the last mus equal to zero. The
remaining (n − m) us are independent.
Furthermore, we have expressed velocities and angular velocities in accordance with the
linear relations
v
i
=
n
j=1
γ
ij
(q, t)u
j
+ γ
it
(q, t) (4.437)
ω
i
=
n
j=1
β
ij
(q, t)u
j
+ β
it
(q, t) (4.438)
and we note that the γs and βs can be used in writing the differential equations of motion.
It is possible, however, to define the us in a way such that, in general, the
˙
qs are nonlinear
functions of the us. For a system with nqs and m independent nonholonomic constraints, one
can define the (n − m) independent usasa set of parameters which specify the operating
point in velocity space, that is,
˙
q-space. This operating point must lie on each of the m
constraint surfaces in velocity space, and therefore on their common intersection.
We need to find expressions for the γs and βs in writing the equations of motion,
but the linear equations (4.437) and (4.438) are no longer valid for the more general us.
Nevertheless, we can use
γ
ij
(q, u, t) =
∂v
i
(q, u, t)
∂u
j
(4.439)
β
ij
(q, u, t) =
∂ω
i
(q, u, t)
∂u
j
(4.440)
276 Equations of motion: differential approach
Agivensetofus may not have uniform dimensions, and so the question now arises
concerning how the corresponding Qs are to be found. One can use virtual work or, in this
case, virtual power to evaluate the Qs. For example, if a system of N particles has a force
F
i
applied to the ith particle (i = 1,...,N ), then, using virtual velocities,
N
i=1
F
i
· δv
i
=
n−m
j=1
Q
j
δu
j
(4.441)
where
δv
i
=
n−m
j=1
∂v
i
∂u
j
δu
j
=
n−m
j=1
γ
ij
δu
j
(4.442)
Then, since the δus are independent, we obtain
Q
j
=
N
i=1
F
i
· γ
ij
( j = 1,...,n − m) (4.443)
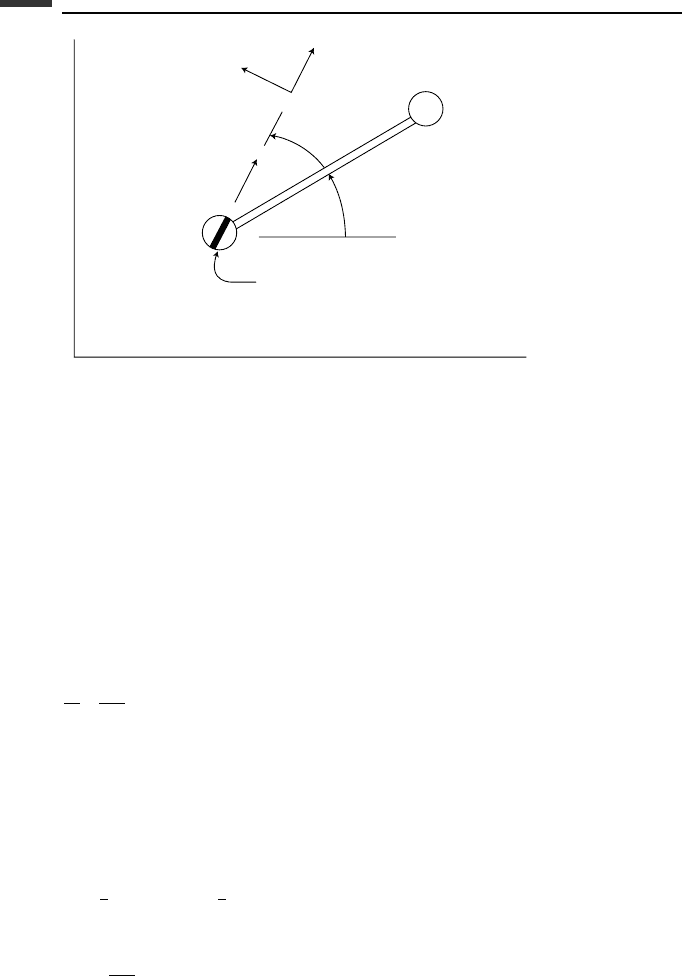
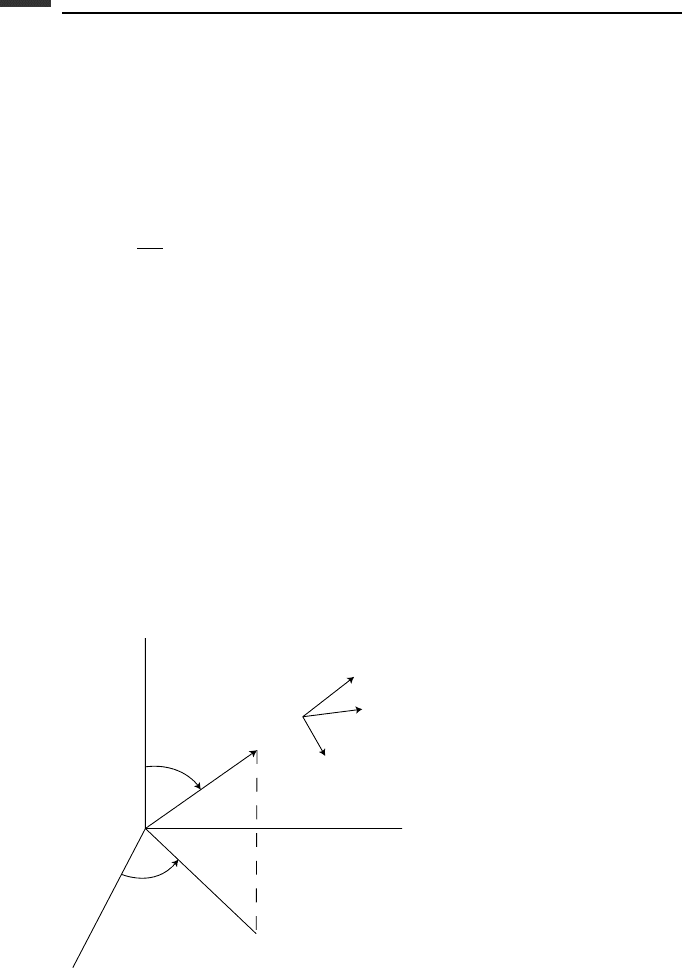
Example 4.14 Consider the simple case of a particle of mass m which has a force F
applied to it. Let us choose (v, θ, φ)asus to represent the velocity vector v of the particle
in three-dimensional velocity space (Fig. 4.10).
This is similar to the use of spherical coordinates to designate a position in ordinary
3-space. The unit vectors e
v
, e
θ
, e
φ
form an orthogonal triad with e
φ
= e
v
× e
θ
. In place of
(4.436) we have the equations
˙
x = v sin θ cos φ (4.444)
˙
y = v sin θ sin φ (4.445)
˙
z = v cos θ (4.446)
x
.
y
.
φ
O
θ
v
e
θ
e
v
e
φ
z
.
Figure 4.10.
277 Summary of differential methods
which are nonlinear in the us. Conversely, we find that
u
1
= v =
˙
x
2
+
˙
y
2
+
˙
z
2
(4.447)
u
2
= θ = cos
−1
˙
z
˙
x
2
+
˙
y
2
+
˙
z
2
(4.448)
u
3
= φ = tan
−1
˙
y
˙
x
(4.449)
which are nonlinear and replace (4.435).
First method Let us use the general dynamical equation in the form
N
i=1
m
i
˙
v
i
· γ
ij
= Q
j
(4.450)
The velocity is
v = ve
v
(θ,φ) (4.451)
and the velocity coefficients, obtained by using (4.439), are
γ
11
= e
v
, γ
12
= v
∂e
v
∂θ
= ve
θ
, γ
13
= v
∂e
v
∂φ
= v sin θ e
φ
(4.452)
Note that the γs can be functions of the us in contrast to (4.437).
The particle acceleration is
˙
v = ˙ve
v
+ v
˙
e
v
= ˙ve
v
+ v
˙
θe
θ
+ v
˙
φ sin θ e
φ
(4.453)
and the force F, in terms of its components, is
F = F
v
e
v
+ F
θ
e
θ
+ F
φ
e
φ
(4.454)
Hence, using (4.443), we find that
Q
1
= F
v
, Q
2
= F
θ
v, Q
3
= F
φ
v sin θ (4.455)
Finally, using (4.450), the v equation is
m ˙v = F
v
(4.456)
Similarly, the θ equation is
mv
2
˙
θ = F
θ
v
or
mv
˙
θ = F
θ
(4.457)
The φ equation is
mv
2
˙
φ sin
2
θ = F
φ
v sin θ
278 Equations of motion: differential approach
or
mv
˙
φ sin θ = F
φ
(4.458)
Actually, knowing
˙
v, these equations of motion could have been obtained directly by
applying Newton’s law in the three orthogonal directions.
Second method Let us consider the Gibbs–Appell equation
∂ S
∂
˙
u
j
= Q
j
(4.459)
where, in this case,
S =
1
2
m
˙
v
2
=
1
2
m[˙v
2
+ (v
˙
θ)
2
+ (v
˙
φ sin θ )
2
] (4.460)
The v equation of motion is
∂ S
∂ ˙v
= m ˙v = F
v
(4.461)
The θ equation is
∂ S
∂
˙
θ
= mv
2
˙
θ = F
θ
v (4.462)
or
mv
˙
θ = F
θ
(4.463)
The φ equation is
∂ S
∂
˙
φ
= mv
2
˙
φ sin
2
θ = F
φ
v sin θ (4.464)
or
mv
˙
φ sin θ = F
φ
(4.465)
We see that the Gibbs–Appell method is quite direct when applied to this example.
4.9 Bibliography
Desloge, E. A. Classical Mechanics, Vol. 2. New York: John Wiley and Sons, 1982.
Greenwood, D. T. Principles of Dynamics, 2nd edn. Englewood Cliffs, NJ: Prentice-Hall, 1988.
Kane, T. R. and Levinson, D. A. Dynamics: Theory and Applications. New York: McGraw-Hill, 1985.
Neimark, Ju. I. and Fufaev, N. A. Dynamics of Nonholonomic Systems. Translations of Mathematical
Monographs, Vol. 33. Providence, RI: American Mathematical Society, 1972.
Papastavridis, J. G. Analytical Mechanics. Oxford: Oxford University Press, 2002.
Pars, L. A. A Treatise on Analytical Dynamics. London: William Heinemann, 1965.