Greenwood D.T. Advanced Dynamics
Подождите немного. Документ загружается.


259 The Gibbs–Appell equation
or nonholonomic, which can be written in the form
3N
k=1
a
jk
(x , t )
˙
x
k
+ a
jt
(x , t ) = 0(j = 1,...,m) (4.320)
Newton’s law, applied to individual particles, results in
m
k
¨
x
k
= F
k
+ R
k
(k = 1,...,3N ) (4.321)
where F
k
is an applied force component and R
k
is the corresponding constraint force
component. From (4.321),
R
k
= m
k
¨
x
k
−
F
k
m
k
(4.322)
Now define the function
C =
1
2
3N
k=1
R
2
k
m
k
=
1
2
3N
k=1
m
k
¨
x
k
−
F
k
m
k
2
(4.323)
which represents the weighted sum of the squares of the constraint force magnitudes. The
principle of least constraint states that C is minimized with respect to variations in the
¨
xs
by the actual motion at each instant of time. It is assumed that the
¨
xs and δ
¨
xs satisfy the
constraints.
Thus, noting that F
k
is not varied, we obtain
δC =
3N
k=1
m
k
¨
x
k
−
F
k
m
k
δ
¨
x
k
= 0 (4.324)
where
3N
k=1
a
jk
δ
¨
x
k
= 0(j = 1,...,m) (4.325)
The constraints are incorporated into the analysis by using Lagrange multipliers. Multiply
(4.325) by λ
j
and sum over j. Then, upon adding this result to (4.324), we obtain
3N
k=1
m
k
¨
x
k
− F
k
+
m
j=1
λ
j
a
jk
δ
¨
x
k
= 0 (4.326)
where the δ
¨
xs are now regarded as independent. Hence, each coefficient must be zero, or
m
k
¨
x
k
= F
k
−
m
j=1
λ
j
a
jk
(k = 1,...,3N ) (4.327)
These are the equations of motion in terms of Cartesian coordinates.
Now let us broaden the analysis by transforming to quasi-velocities and generalized
coordinates. Write (4.323) in the form
C =
1
2
3N
k=1
m
k
¨
x
2
k
−
3N
k=1
F
k
¨
x
k
+
3N
k=1
F
2
k
2m
k
(4.328)
260 Equations of motion: differential approach
The Gibbs–Appell function is, from (4.279),
S =
1
2
3N
k=1
m
k
¨
x
2
k
(4.329)
Then, noting that F
k
is not varied, we can write
C = S −
3N
k=1
F
k
¨
x
k
+ const (4.330)
The transformation equations are
x
k
= x
k
(q, t)(k = 1,...,3N ) (4.331)
˙
x
k
=
˙
x
k
(q, u, t)(k = 1,...,3N) (4.332)
and therefore
¨
x
k
=
n−m
j=1
∂
˙
x
k
∂u
j
˙
u
j
+ f
k
(q, u, t)(k = 1,...,3N) (4.333)
where the (n − m) us are independent and consistent with any constraints on the xs. Note
that
˙
x
k
is a linear function of the us, and
¨
x
k
is a linear function of the
˙
us. Also, the generalized
force associated with u
j
is
Q
j
=
3N
k=1
F
k
∂
˙
x
k
∂u
j
( j = 1,...,n − m) (4.334)
Then we obtain
C(q, u,
˙
u, t) = S(q, u,
˙
u, t) −
n−m
j=1
Q
j
˙
u
j
−
3N
k=1
F
k
f
k
+ const (4.335)
Now consider a variation δC due to small variations in the
˙
us, with the qs and us held
fixed.
δC =
n−m
j=1
∂ S
∂
˙
u
j
δ
˙
u
j
−
n−m
j=1
Q
j
δ
˙
u
j
(4.336)
Thus, for a stationary value of C,wehave
δC =
n−m
j=1
∂ S
∂
˙
u
j
− Q
j
δ
˙
u
j
= 0 (4.337)
for arbitrary δ
˙
us. This requires that each coefficient be zero, and we obtain
∂ S
∂
˙
u
j
= Q
j
( j = 1,...,n − m) (4.338)
Thus, the principle of least constraint applied to a system of particles results in the Gibbs–
Appell equation.
261 Constraints and energy rates
It has been shown that the Gibbs–Appell equation follows from the requirement that C be
stationary with respect to variations of the
˙
us. That this stationary point is also a minimum
can be shown by using (4.323) to evaluate
∂
2
C
∂
¨
x
i
∂
¨
x
j
=
m
i
i = j
0 i = j
(4.339)
The corresponding matrix is positive definite, that is,
δ
2
C =
3N
i=1
3N
j=1
∂
2
C
∂
¨
x
i
∂
¨
x
j
δ
¨
x
i
δ
¨
x
j
≥ 0 (4.340)
and the value zero occurs only when all the δ
¨
xs are zero. Since the second variation of C is
a positive-definite function of the δ
¨
xs, the stationary point is also a minimum.
4.7 Constraints and energy rates
Ideal and conservative constraints
Consider a dynamical system having m constraints of the general nonholonomic form
f
j
(q,
˙
q, t) = 0(j = 1,...,m) (4.341)
This general form includes the usual nonholonomic constraints which are linear in the
velocities, that is,
n
i=1
a
ji
(q, t)
˙
q
i
+ a
jt
(q, t) = 0(j = 1,...,m) (4.342)
Furthermore, holonomic constraints of the form
φ
j
(q, t) = 0(j = 1,...,m) (4.343)
can be expressed in the linear form of (4.342) after differentiation with respect to time.
˙
φ
j
(q,
˙
q, t) =
n
i=1
∂φ
j
∂q
i
˙
q
i
+
∂φ
j
∂t
= 0(j = 1,...,m) (4.344)
Of course, this linear form is integrable.
Let us define an ideal constraint as a workless kinematic constraint which may be either
scleronomic or rheonomic. By workless, we mean that no work is done by the constraint
forces in an arbitrary reversible virtual displacement that is consistent with the instantaneous
constraints. For example, an ideal constraint might be a frictionless surface on which sliding
occurs, or it might involve rolling contact without slipping. Another example is a knife-edge
constraint with no frictional resistance for motion along the knife edge, but with no slipping
allowed perpendicular to it.
262 Equations of motion: differential approach
Let C
j
be the generalized ideal constraint force corresponding to the jth constraint. The
virtual work of C
j
in an arbitrary virtual displacement consistent with the instantaneous
constraints is
δW = C
j
· δq =
n
i=1
C
ji
δq
i
= 0(j = 1,...,m) (4.345)
where, for the general nonholonomic case,
n
i=1
∂ f
j
∂
˙
q
i
δq
i
= 0(j = 1,...,m) (4.346)
Assuming the usual case of nonholonomic constraints which are linear in the
˙
qs, we have
n
i=1
a
ji
(q, t) δq
i
= 0(j = 1,...,m) (4.347)
If the constraints are holonomic, the δqs satisfy
n
i=1
∂φ
j
∂q
i
δq
i
= 0(j = 1,...,m) (4.348)
Equation (4.345) states that the ideal constraint force vector C
j
and an allowable virtual
displacement δq are orthogonal in n-dimensional configuration space. A comparison of
(4.345) and (4.348) shows that C
ji
and ∂φ
j
/∂q
i
are proportional for any given j,soC
j
is
directed normal to the constraint surface; that is, in the direction of the gradient of φ
j
(q, t)
in q-space. Similarly, a comparison of (4.345) and (4.346) indicates that C
j
is directed
normal to the constraint surface in velocity space.
A virtual velocity δw is subject to instantaneous constraint equations of the form
n
i=1
∂ f
j
∂
˙
q
i
δw
i
= 0(j = 1,...,m) (4.349)
or
n
i=1
a
ji
δw
i
= 0(j = 1,...,m) (4.350)
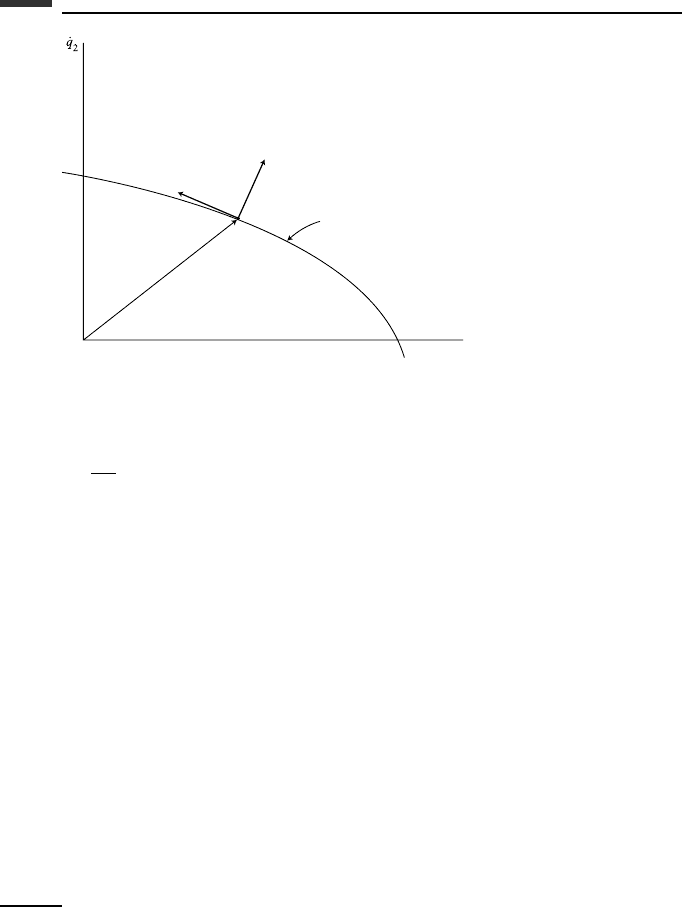
A comparison of (4.346) and (4.349) or (4.347) and (4.350) shows that the permitted
directions of δq and δw are the same, namely, in the tangent plane at the operating point P
in velocity space (Fig. 4.7). The direction of an ideal constraint force C
j
is perpendicular to
this tangent plane. Note that, for a holonomic constraint, the tangent plane at the operating
point in configuration space has the same orientation as the corresponding constraint plane
in velocity space.
Now let us define a conservative constraint to be an ideal constraint which meets the
additional condition that
C
j
·
˙
q = 0 (4.351)
that is, the generalized constraint force C
j
does no work in any possible actual motion of
the system. We found earlier from (4.345) and (4.346) that the components C
ji
and ∂ f
j
/∂
˙
q
i
263 Constraints and energy rates
C
j
P
f
j
(q, q, t) = 0
q
.
.
δw
q
1
.
Figure 4.7.
are proportional. Hence,
n
i=1
∂ f
j
∂
˙
q
i
˙
q
i
= 0 (4.352)
This is just the condition that f
j
(q,
˙
q, t)isahomogeneous function of the
˙
qs. In other words,
if a generalized velocity
˙
q satisfies the constraint, then that velocity multiplied by an arbitrary
scalar constant will also satisfy the constraint. This implies that the corresponding constraint
surface in velocity space can be generated by sweeping a straight line passing through the
origin. It is clear that the common case of a plane passing through the origin is included, but
other possibilities exist, such as, for example, a conical surface with its vertex at the origin.
The homogeneity condition for a conservative constraint requires that a
jt
be zero for
the common case of a linear nonholonomic constraint, that is, it must be catastatic.For
a holonomic constraint to be conservative, it must be scleronomic. Thus, coefficients of
the form a
ji
(q, t) are acceptable in the nonholonomic case, but any holonomic constraint
function must be of the form φ
j
(q).
It is possible that a constraint which does not meet the homogeneity condition for a set of
generalized coordinates may be homogeneous in form or may disappear entirely for another
choice of generalized coordinates. Thus, whether a constraint is classed as conservative or
not may depend upon the choice of coordinates.
Conservative system
A conservative system can be defined as a dynamical system for which an energy integral
can be found. As an example, let us consider a dynamical system having m nonholonomic
constraints of the general form
f
j
(q,
˙
q, t) = 0(j = 1,...,m) (4.353)
264 Equations of motion: differential approach
Assume that the system can be described by Lagrange’s equation in the form
d
dt
∂ L
∂
˙
q
i
−
∂ L
∂q
i
=
m
j=1
λ
j
∂ f
j
∂
˙
q
i
(i = 1,...,n) (4.354)
Now let us use the same procedure that we employed previously in (2.149)–(2.155). The
result in this more general case is
˙
E =
˙
T
2
−
˙
T
0
+
˙
V =
n
i=1
m
j=1
λ
j
∂ f
j
∂
˙
q
i
˙
q
i
−
∂ L
∂t
(4.355)
where the λs are usually nonzero and not easily evaluated. The first term on the right
will be zero, however, if f
j
(q,
˙
q, t) is a homogeneous function of the
˙
qs, that is, if each
constraint is conservative. The term ∂ L/∂t will equal zero if neither T nor V is an explicit
function of time.
In summary, a system having holonomic or nonholonomic constraints will be conservative
if it meets the following conditions:
1. The standard form of Lagrange’s equation, as given by (4.354), applies.
2. All constraints are conservative.
3. The Lagrangian function L = T − V is not an explicit function of time.
These are sufficient conditions for a conservative system. Note that the conserved integral
of the motion
E(q,
˙
q) = T
2
− T
0
+ V (4.356)
is equal in value to the Hamiltonian function H (q, p).
Work and energy rates
Consider a system of N rigid bodies. The forces acting on the ith body are equivalent to
a force F
i
acting at a reference point P
i
plus a couple M
i
. Let v
i
be the velocity of point
P
i
,fixedintheith body, and let ω
i
be the angular velocity of the body. Assume linear
nonholonomic constraints.
From the principle of work and kinetic energy, and summing over the N bodies,
˙
T =
˙
W =
N
i=1
(F
i
· v
i
+ M
i
· ω
i
) (4.357)
where F
i
and M
i
may include constraint forces as well as applied forces.
Now let us assume that a portion of F
i
and M
i
arise from a potential energy function
V (q, t ), but the remaining primed quantities F
i
and M
i
do not. Thus, we have
F
i
= F
i
−
∂V
∂r
i
(i = 1,...,N) (4.358)
M
i
= M
i
−
∂V
∂θ
i
(i = 1,...,N) (4.359)
where r
i
is the position vector of P
i
and ω
i
= dθ
i
/dt. In terms of Euler angles, we use the

265 Constraints and energy rates
notation
∂V
∂θ
=
∂V
∂ψ
e
ψ
+
∂V
∂θ
e
θ
+
∂V
∂φ
e
φ
(4.360)
ω =
˙
ψe
ψ
+
˙
θe
θ
+
˙
φe
φ
(4.361)
A similar notation is used for ∂V /∂r. From (4.357)–(4.359), we obtain
˙
T =
N
i=1
(F
i
· v
i
+ M
i
· ω
i
) −
N
i=1
∂V
∂r
i
· v
i
+
∂V
∂θ
i
· ω
i
(4.362)
But,
˙
V =
N
i=1
∂V
∂r
i
· v
i
+
∂V
∂θ
i
· ω
i
+
∂V
∂t
(4.363)
Hence, we find that the rate of change of the total energy is
˙
T +
˙
V =
N
i=1
(F
i
· v
i
+ M
i
· ω
i
) +
∂V
∂t
(4.364)
Note that constraint forces are included in F
i
and M
i
, but forces derived from potential
energy are not included.
Now let us consider a system whose motion is described in terms of independent quasi-
velocities. Assume a system of N rigid bodies and start with the general dynamical equation
in the form
N
i=1
[m
i
˙
v
i
· γ
ij
+ (I
ci
· ˙ω
i
+ ω
i
× I
ci
· ω
i
) ·β
ij
] = Q
j
( j = 1,...,n − m) (4.365)
where the center of mass is chosen as the reference point for each body.
Multiplying (4.365) by u
j
and summing over j, we obtain
N
i=1
n−m
j=1
[m
i
˙
v
i
· γ
ij
u
j
+ (I
ci
· ˙ω
i
+ ω
i
× I
ci
· ω
i
) ·β
ij
u
j
] =
n−m
j=1
Q
j
u
j
(4.366)
Recall that γ
ij
= ∂v
i
/∂u
j
and β
ij
= ∂ω
i
/∂u
j
. The kinetic energy is
T =
1
2
N
i=1
m
i
v
i
· v
i
+
1
2
N
i=1
ω
i
· I
ci
· ω
i
(4.367)
Then, using Euler’s theorem on homogeneous functions, we see that
n−m
j=1
∂T
∂u
j
u
j
=
N
i=1
n−m
j=1
m
i
v
i
·
∂v
i
∂u
j
u
j
+ ω
i
· I
ci
·
∂ω
i
∂u
j
u
j
=
N
i=1
n−m
j=1
(m
i
v
i
· γ
ij
u
j
+ ω
i
· I
ci
· β
ij
u
j
)
= 2T
2
+ T
1
(4.368)
where T
2
is quadratic and T
1
is linear in the us.
266 Equations of motion: differential approach
Now let us differentiate (4.368) with respect to time and recall that
n−m
j=1
γ
ij
u
j
= v
i
− γ
it
(4.369)
n−m
j=1
β
ij
u
j
= ω
i
− β
it
(4.370)
We obtain
d
dt
N
i=1
n−m
j=1
(m
i
v
i
· γ
ij
u
j
+ ω
i
· I
ci
· β
ij
u
j
)
= 2
˙
T
2
+
˙
T
1
=
N
i=1
n−m
j=1
[m
i
˙
v
i
· γ
ij
u
j
+ (I
ci
· ˙ω
i
+ ω
i
× I
ci
· ω
i
) ·β
ij
u
j
]
+
N
i=1
[m
i
v
i
· (
˙
v
i
− ˙γ
it
) +ω
i
· I
ci
· (˙ω
i
−
˙
β
it
)] (4.371)
Differentiating (4.367) with respect to time, we obtain
˙
T =
N
i=1
(m
i
v
i
·
˙
v
i
+ ω
i
· I
ci
· ˙ω
i
) =
˙
T
2
+
˙
T
1
+
˙
T
0
(4.372)
where we note that
ω
i
·
˙
I
ci
· ω
i
= 0 (4.373)
Next, subtract (4.372) from (4.371). The result is
˙
T
2
−
˙
T
0
=
N
i=1
n−m
j=1
[m
i
˙
v
i
· γ
ij
u
j
+ (I
ci
· ˙ω
i
+ ω
i
× I
ci
· ω
i
) ·β
ij
u
j
]
−
N
i=1
(m
i
v
i
· ˙γ
it
+ ω
i
· I
ci
·
˙
β
it
) (4.374)
Then, using (4.366), we obtain
˙
T
2
−
˙
T
0
=
n−m
j=1
Q
j
u
j
−
N
i=1
m
i
v
i
· ˙γ
it
−
N
i=1
ω
i
· I
ci
·
˙
β
it
(4.375)
Let us assume that a portion of Q
j
is obtained from a potential function V (q, t ). Thus,
we can write
Q
j
= Q
j
−
n
k=1
∂V
∂q
k
∂
˙
q
k
∂u
j
= Q
j
−
n
k=1
∂V
∂q
k
kj
(4.376)
267 Constraints and energy rates
where Q
j
is that portion which is not obtainable from a potential energy function. Also
note that
˙
q
k
=
n−m
j=1
kj
u
j
+
kt
(4.377)
and therefore
˙
V −
∂V
∂t
=
n−m
j=1
n
k=1
∂V
∂q
k
kj
u
j
+
n
k=1
∂V
∂q
k
kt
(4.378)
Finally, adding (4.375) and (4.378), and using (4.376), we obtain
˙
E =
˙
T
2
−
˙
T
0
+
˙
V =
n−m
j=1
Q
j
u
j
+
∂V
∂t
+
n
k=1
∂V
∂q
k
kt
−
N
i=1
m
i
v
i
· ˙γ
it
−
N
i=1
ω
i
· I
ci
·
˙
β
it
(4.379)
This is the general energy rate equation for a system of rigid bodies. An alternate
form is
˙
E =
˙
T
2
−
˙
T
0
+
˙
V =
n−m
j=1
Q
j
u
j
+
∂V
∂t
+
n
k=1
∂V
∂q
k
kt
−
N
i=1
p
i
· ˙γ
it
−
N
i=1
H
ci
·
˙
β
it
(4.380)
where
p
i
= m
i
v
i
(4.381)
H
ci
= I
ci
· ω
i
(4.382)
and we use a center of mass reference point on each body.
The meaning of these energy rate equations can be clarified by noting that γ
it
represents
the velocity of the ith reference point when all the us are set equal to zero. Similarly, β
it
is
equal to the angular velocity of the i th body if all us equal zero. Additionally, note that
kt
is equal to the value of
˙
q
k
when all the us are set equal to zero.
Another approach to energy rate calculations is to begin with the Boltzmann–Hamel
equation in the general form of (4.85)
d
dt
∂T
∂u
r
−
n
i=1
∂T
∂q
i
ir
+
m
j=1
n−m
l=1
∂T
∂u
j
γ
j
rl
u
l
+
n
j=1
∂T
∂u
j
γ
j
r
= Q
r
(r = 1,...,n − m)
(4.383)
Multiply by u
r
and sum over r, using (4.376). The result is
n−m
r=1
d
dt
∂T
∂u
r
u
r
−
n
i=1
n−m
r=1
∂T
∂q
i
ir
u
r
+
n
j=1
n−m
l=1
n−m
r=1
∂T
∂u
j
γ
j
rl
u
l
u
r
+
n
j=1
n−m
r=1
∂T
∂u
j
γ
j
r
u
r
=
n−m
r=1
Q
r
u
r
−
n
i=1
n−m
r=1
∂V
∂q
i
ir
u
r
(4.384)
268 Equations of motion: differential approach
Using Euler’s theorem, as in (4.368), we find that
d
dt
n−m
r=1
∂T
∂u
r
u
r
=
n−m
r=1
d
dt
∂T
∂u
r
u
r
+
n−m
r=1
∂T
∂u
r
˙
u
r
= 2
˙
T
2
+
˙
T
1
(4.385)
Now
˙
T =
n
i=1
∂T
∂q
i
˙
q
i
+
n−m
r=1
∂T
∂u
r
˙
u
r
+
∂T
∂t
=
˙
T
2
+
˙
T
1
+
˙
T
0
(4.386)
so, from (4.385) and (4.386), we obtain
n−m
r=1
d
dt
∂T
∂u
r
u
r
=
˙
T
2
−
˙
T
0
+
n
i=1
∂T
∂q
i
˙
q
i
+
∂T
∂t
(4.387)
Furthermore, we see that
˙
V =
n
i=1
∂V
∂q
i
˙
q
i
+
∂V
∂t
(4.388)
and
n−m
r=1
ir
u
r
=
˙
q
i
−
it
(4.389)
From (4.387) and (4.388), we see that
˙
T
2
−
˙
T
0
+
˙
V =
n−m
r=1
d
dt
∂T
∂u
r
u
r
−
n
i=1
∂ L
∂q
i
˙
q
i
−
∂ L
∂t
(4.390)
where L(q, u, t) = T (q, u, t) − V (q, t). Because of the skew symmetry of γ
j
rl
with respect
to r and l, we note that
n−m
l=1
n−m
r=1
γ
j
rl
u
r
u
l
= 0 (4.391)
Then, from (4.384) and (4.389), we obtain
n−m
r=1
d
dt
∂T
∂u
r
u
r
=
n−m
r=1
Q
r
u
r
+
n
i=1
∂ L
∂q
i
(
˙
q
i
−
it
) −
n
j=1
n−m
r=1
∂T
∂u
j
γ
j
r
u
r
(4.392)
Finally, using (4.390) and (4.392), we have the energy rate expression
˙
E =
˙
T
2
−
˙
T
0
+
˙
V =
n−m
r=1
Q
r
u
r
−
∂ L
∂t
−
n
i=1
∂ L
∂q
i
it
−
n
j=1
n−m
r=1
∂T
∂u
j
γ
j
r
u
r
(4.393)
Let us compare the energy rate equations (4.380) and (4.393). For a general system of N
rigid bodies, we have the corresponding terms
N
i=1
(p
i
· ˙γ
it
+ H
ci
·
˙
β
it
) =
∂T
∂t
+
n
k=1
∂T
∂q
k
kt
+
n
j=1
n−m
r=1
∂T
∂u
j
γ
j
r
u
r
(4.394)