Greenwood D.T. Advanced Dynamics
Подождите немного. Документ загружается.

239 The general dynamical equation
X
O
Y
Z
φ
φ
x
y
z
mg
θ
θ
⍀
⭈
⭈
l
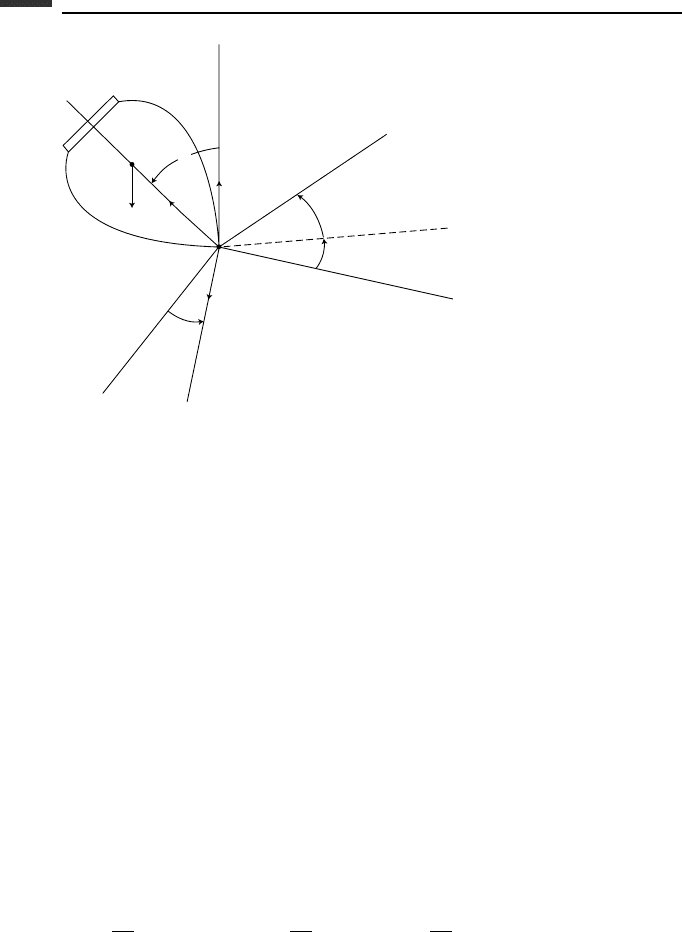
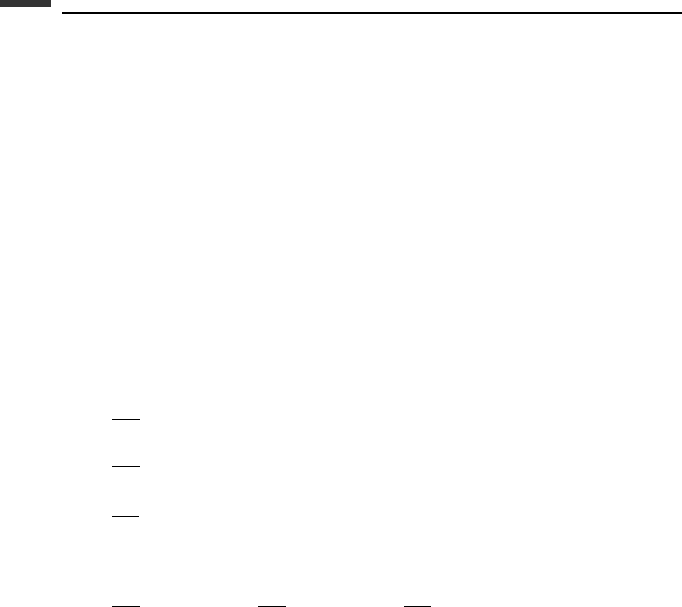
Figure 4.4.
Example 4.5 We can illustrate the use of (4.144) by considering the motion of a top with a
fixed point O (Fig. 4.4). Let us use the type II Euler angles φ and θ to specify the orientation
of the xyz reference frame and its corresponding unit vectors i, j, k.
For quasi-velocities, let us choose
u
1
=
˙
φ, u
2
=
˙
θ, u
3
= (4.147)
where the first two are actually the time derivatives of true coordinates, and is the total
angular velocity about the axis of symmetry z. The angular velocity of the xyz reference
frame is
ω
c
=
˙
θi +
˙
φ sin θ j +
˙
φ cos θ k (4.148)
whereas the angular velocity of the body is
ω =
˙
θi +
˙
φ sin θ j + k (4.149)
The angular velocity of the body relative to the xyz frame is the Euler angle rate
˙
ψ, that is,
=
˙
φ cos θ +
˙
ψ (4.150)
All the γ
ij
velocity coefficients are zero because the reference point O is fixed. The βs
are
β
11
=
∂ω
∂
˙
φ
= sin θ j, β
12
=
∂ω
∂
˙
θ
= i, β
13
=
∂ω
∂
= k (4.151)
The angular momentum about O is
H = I
t
ω
x
i + I
t
ω
y
j + I
a
ω
z
k = I
t
˙
θi + I
t
˙
φ sin θ j + I
a
k (4.152)

240 Equations of motion: differential approach
The xyz frame rotates at ω
c
so
˙
i = ω
c
× i =
˙
φ cos θ j −
˙
φ sin θ k
˙
j = ω
c
× j =−
˙
φ cos θ i +
˙
θk
˙
k = ω
c
× k =
˙
φ sin θ i −
˙
θj
(4.153)
Thus, we find that
˙
H = (I
t
¨
θ − I
t
˙
φ
2
sin θ cos θ + I
a
˙
φ sin θ )i
+(I
t
¨
φ sin θ + 2I
t
˙
φ
˙
θ cos θ − I
a
˙
θ) j + I
a
˙
k (4.154)
The Qsare
Q
1
= Q
φ
= 0, Q
2
= Q
θ
= mgl sin θ, Q
3
= Q
= 0 (4.155)
The general dynamical equation in the form of (4.144) is used to obtain, first, the φ
equation from the j component of
˙
H.
I
t
¨
φ sin
2
θ + 2I
t
˙
φ
˙
θ sin θ cos θ − I
a
˙
θ sin θ = 0 (4.156)
Assuming that sin θ = 0, we can divide by sin θ to obtain
I
t
¨
φ sin θ + 2I
t
˙
φ
˙
θ cos θ − I
a
˙
θ = 0 (4.157)
Similarly, the θ equation is
I
t
¨
θ − I
t
˙
φ
2
sin θ cos θ + I
a
˙
φ sin θ = mgl sin θ (4.158)
Finally, the equation is
I
a
˙
= 0 (4.159)
indicating that is constant in the previous two equations of motion.
The motion of the xyz reference frame has physical significance. The precession rate
of the top is
˙
φ and its nutation rate is
˙
θ. The rotation rate of the top relative to the xyz
frame is the third Euler angle rate
˙
ψ, given by (4.150). However, because we chose the
quasi-velocity rather than
˙
ψ as u
3
, the final equations of motion turned out to be simpler
in form than if we had used the Lagrangian approach with
˙
qs as velocity variables. Thus,
the flexibility in the choice of us can often lead to a simplified analysis.
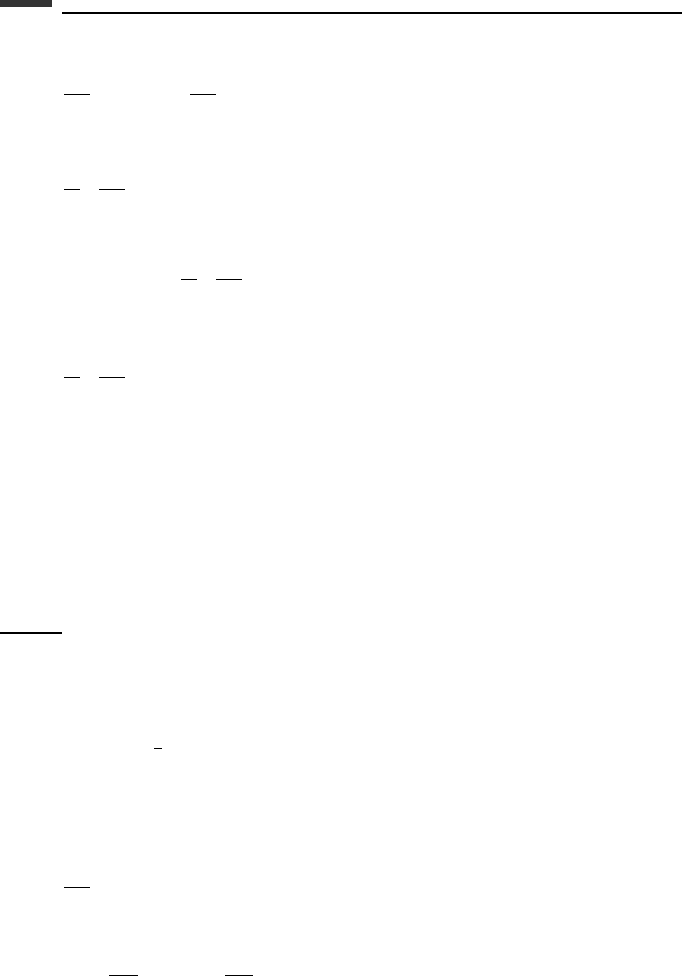
Example 4.6 Let us apply the general dynamical equation to the problem of the motion
of a thin uniform disk rolling on a horizontal plane (Fig. 4.2). We shall use the general form
N
i=1
[
˙
p
i
· γ
ij
+ (
˙
H
i
+ m
i
ρ
ci
×
˙
v
i
) ·β
ij
] = Q
j
( j = 1,...,n − m) (4.160)
Choose the reference point of the disk at its center, implying that ρ
ci
= 0. Type II Euler
angles specify the orientation of the disk. Its angular velocity is
ω =
˙
θe
θ
+ ω
d
e
d
+ e
ψ
(4.161)
241 The general dynamical equation
where ω
d
=
˙
φ sin θ and where e
θ
, e
d
, e
ψ
are mutually orthogonal unit vectors. Noting that
e
θ
remains horizontal, we find that the angular velocity of the unit vectors is
˙
φ +
˙
θ or
ω
c
=
˙
φ(sin θ e
d
+ cos θ e
ψ
) +
˙
θe
θ
=
˙
θe
θ
+ ω
d
e
d
+ ω
d
cot θ e
ψ
(4.162)
Assuming no slipping, the velocity of the center of mass is
v =−re
θ
+r
˙
θe
ψ
(4.163)
Let the independent usbe
u
1
=
˙
θ, u
2
= ω
d
, u
3
= (4.164)
The γsare
γ
11
=
∂v
∂
˙
θ
= r e
ψ
, γ
12
=
∂v
∂ω
d
= 0, γ
13
=
∂v
∂
=−re
θ
(4.165)
From (4.161), the βsare
β
11
=
∂ω
∂
˙
θ
= e
θ
, β
12
=
∂ω
∂ω
d
= e
d
, β
13
=
∂ω
∂
= e
ψ
(4.166)
The translational momentum of the disk is
p = mv =−mre
θ
+ mr
˙
θe
ψ
(4.167)
Its moments of inertia are
I
a
=
1
2
mr
2
, I
t
=
1
4
mr
2
(4.168)
and the angular momentum about the center is
H =
1
4
mr
2
˙
θe
θ
+
1
4
mr
2
ω
d
e
d
+
1
2
mr
2
e
ψ
(4.169)
In order to find
˙
p and
˙
H, we need first to evaluate the time derivatives of the unit vectors.
˙
e
θ
= ω
c
× e
θ
= ω
d
cot θe
d
− ω
d
e
ψ
˙
e
d
= ω
c
× e
d
=−ω
d
cot θe
θ
+
˙
θe
ψ
(4.170)
˙
e
ψ
= ω
c
× e
ψ
= ω
d
e
θ
−
˙
θe
d
Then we obtain
˙
p = mr[(−
˙
+
˙
θω
d
)e
θ
− (
˙
θ
2
+ ω
d
cot θ)e
d
+ (
¨
θ + ω
d
)e
ψ
]
(4.171)
˙
H =
mr
2
4
(
¨
θ − ω
2
d
cot θ + 2ω
d
)e
θ
+ (˙ω
d
+
˙
θω
d
cot θ − 2
˙
θ)e
d
+ 2
˙
e
ψ
(4.172)
The generalized applied forces are
Q
1
=−mgr cos θ, Q
2
= 0, Q
3
= 0 (4.173)
242 Equations of motion: differential approach
Then, using (4.160), the θ equation is
5
4
mr
2
¨
θ −
1
4
mr
2
ω
2
d
cot θ +
3
2
mr
2
ω
d
=−mgr cos θ (4.174)
Similarly, the ω
d
equation is
1
4
mr
2
˙ω
d
+
1
4
mr
2
˙
θω
d
cot θ −
1
2
mr
2
˙
θ = 0 (4.175)
and the equation is
3
2
mr
2
˙
− mr
2
˙
θω
d
= 0 (4.176)
Equations (4.174)–(4.176) are a minimum set of first-order dynamical equations in the
us. They are identical with the equations obtained by the Boltzmann–Hamel method, but
here they are found by a much simpler procedure. Notice that the constraint equations do
not enter explicitly.
The coefficients of the us in the dynamical equations are functions of θ only; and θ can be
generated by integrating u
1
with respect to time. So, one can obtain θ as a function of time
by integrating four first-order equations. However, to obtain the complete configuration as
a function of time, we need a total of five first-order kinematical equations for the
˙
qs. First,
we see from (4.162) that ω
d
=
˙
φ sin θ or
˙
φ =
u
2
sin θ
(4.177)
Also,
˙
θ = u
1
(4.178)
and
˙
ψ = −
˙
φ cos θ =−u
2
cot θ + u
3
(4.179)
Finally, the contact point C moves with a speed r
˙
ψ having the components
˙
x =−r
˙
ψ cos φ = ru
2
cos φ cot θ − ru
3
cos φ (4.180)
˙
y =−r
˙
ψ sin φ = ru
2
sin φ cot θ − ru
3
sin φ (4.181)
These five kinematical equations plus the three dynamical equations completely determine
the motion of the disk.
For scleronomic systems such as this, the kinematical equations have the matrix form
˙
q = Φu (4.182)
where Φ = Ψ
−1
and where Ψ is the coefficient matrix in
u = Ψ
˙
q (4.183)
For this example, we have
u
1
=
˙
θ (4.184)
u
2
=
˙
φ sin θ (4.185)
243 The general dynamical equation
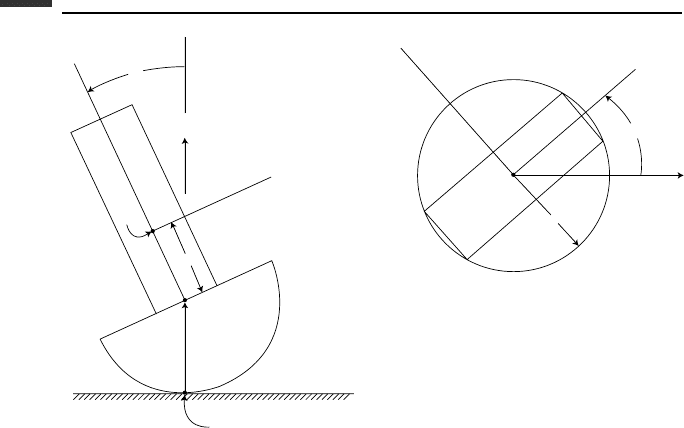
(X, Y )
C
l
y
z
O
r
c.m.
(a)
θ
⭈
r
x
ψ
y
(b)
⭈
Figure 4.5.
u
3
=−
˙
φ cos θ +
˙
ψ (4.186)
u
4
= r
˙
ψ cos φ +
˙
x = 0 (4.187)
u
5
= r
˙
ψ sin φ +
˙
y = 0 (4.188)
where the last two equations are the nonholonomic constraint equations, representing the
nonslip condition at the contact point C.
Example 4.7 As an example of a more complex nonholonomic system, consider the
motion of an unsymmetrical top with a hemispherical base, which rolls without slipping on
a horizontal plane (Fig. 4.5). Let us use the general dynamical equation in the form
N
i=1
[m
i
(
˙
v
i
+ ¨ρ
ci
) ·γ
ij
+ (I
i
· ˙ω
i
+ ω
i
× I
i
· ω
i
+ m
i
ρ
ci
×
˙
v
i
) ·β
ij
] = Q
j
( j = 1,...,n − m) (4.189)
Choose the reference point O at the center of mass, implying that ρ
ci
= 0. The xyz body
axes are principal axes at the center of mass. The orientation of the body is given by type
II Euler angles (φ,θ,ψ). These three Euler angles plus the inertial location (X, Y )ofthe
contact point on the horizontal plane constitute the five qs.
As independent us, let us choose the quasi-velocities
u
1
= ω
x
, u
2
= ω
y
, u
3
= ω
z
(4.190)
244 Equations of motion: differential approach
where the angular velocity of the body is
ω = ω
x
i + ω
y
j + ω
z
k (4.191)
The nonholonomic constraint equations, indicating no slip at the contact point, are
u
4
=−r
˙
θ sin φ + r
˙
ψ cos φ sin θ +
˙
X = 0 (4.192)
u
5
= r
˙
θ cos φ + r
˙
ψ sin φ sin θ +
˙
Y = 0 (4.193)
where φ is the angle between the positive X -axis and the
˙
θ vector.
We wish to find the velocity of the reference point O.Itis
v = ω × (r +lk) = ω × [r sin θ sin ψ i + r sin θ cos ψ j + (r cos θ + l) k]
= [(r cos θ +l) ω
y
−rω
z
sin θ cos ψ] i + [−(r cos θ +l) ω
x
+r ω
z
sin θ sin ψ] j + (rω
x
sin θ cos ψ − r ω
y
sin θ sin ψ) k (4.194)
The velocity coefficients are
γ
11
=
∂v
∂ω
x
=−(r cos θ + l) j +r sin θ cos ψ k
γ
12
=
∂v
∂ω
y
= (r cos θ + l) i − r sin θ sin ψ k
γ
13
=
∂v
∂ω
z
=−r sin θ cos ψ i + r sin θ sin ψ j
(4.195)
Similarly, the angular velocity coefficients are
β
11
=
∂ω
∂ω
x
= i, β
12
=
∂ω
∂ω
y
= j, β
13
=
∂ω
∂ω
z
= k (4.196)
We wish to find
˙
v and, in the process, we note that
˙
i = ω
z
j − ω
y
k,
˙
j =−ω
z
i + ω
x
k,
˙
k = ω
y
i − ω
x
j (4.197)
The Euler angle rates are
˙
φ = csc θ (ω
x
sin ψ + ω
y
cos ψ) (4.198)
˙
θ = ω
x
cos ψ − ω
y
sin ψ (4.199)
˙
ψ =−ω
x
cot θ sin ψ − ω
y
cot θ cos ψ + ω
z
(4.200)
Then a differentiation of (4.194) results in
˙
v = [(r cos θ + l)˙ω
y
−r ˙ω
z
sin θ cos ψ + lω
x
ω
z
] i
+[−(r cos θ + l)˙ω
x
+r ˙ω
z
sin θ sin ψ + lω
y
ω
z
] j
+
r ˙ω
x
sin θ cos ψ − r ˙ω
y
sin θ sin ψ − l
ω
2
x
+ ω
2
y
k (4.201)
after the cancellation of numerous terms.

245 The general dynamical equation
In the evaluation of strictly rotational terms, we find that
I
i
· ˙ω
i
+ ω
i
× I
i
· ω
i
= [I
xx
˙ω
x
+ (I
zz
− I
yy
)ω
y
ω
z
] i
+[I
yy
˙ω
y
+ (I
xx
− I
zz
) ω
z
ω
x
] j + [I
zz
˙ω
z
+ (I
yy
− I
xx
) ω
x
ω
y
] k (4.202)
Furthermore, the gravitational moment about the
˙
θ axis is
M
θ
= mgl sin θ (4.203)
Hence, we obtain
Q
1
= mgl sin θ cos ψ, Q
2
=−mgl sin θ sin ψ, Q
3
= 0 (4.204)
which are the generalized forces corresponding to ω
x
, ω
y
, and ω
z
, respectively.
Now, we are ready to find the dynamical equations by substituting into (4.189). The ω
x
equation is
[I
xx
+mr
2
sin
2
θ cos
2
ψ + m(r cos θ + l)
2
]˙ω
x
− mr
2
˙ω
y
sin
2
θ sin ψ cos ψ
−mr(r cos θ + l)˙ω
z
sin θ sin ψ + [I
zz
− I
yy
− ml(r cos θ +l)] ω
y
ω
z
−mrl
ω
2
x
+ ω
2
y
sin θ cos ψ = mgl sin θ cos ψ (4.205)
Similarly, the ω
y
equation is
−mr
2
˙ω
x
sin
2
θ sin ψ cos ψ + [I
yy
+ mr
2
sin
2
θ sin
2
ψ + m(r cos θ + l)
2
]˙ω
y
−mr(r cos θ + l)˙ω
z
sin θ cos ψ + [I
xx
− I
zz
+ ml(r cos θ +l)] ω
x
ω
z
+mrl
ω
2
x
+ ω
2
y
sin θ sin ψ =−mgl sin θ sin ψ (4.206)
The ω
z
equation is
−mr(r cos θ + l)˙ω
x
sin θ sin ψ − mr(r cos θ +l)˙ω
y
sin θ cos ψ
+(I
zz
+ mr
2
sin
2
θ)˙ω
z
+ (I
yy
− I
xx
) ω
x
ω
y
− mrlω
x
ω
z
sin θ cos ψ
+mrlω
y
ω
z
sin θ sin ψ = 0 (4.207)
Equations (4.205)–(4.207) are the three dynamical equations. In addition, we have three
kinematical equations for the Euler angle rates given by (4.198)–(4.200). These six equations
can be solved for (ω
x
,ω
y
,ω
z
,φ,θ,ψ) as functions of time. If one desires to solve for the
path of the contact point, one can write the constraint equations in the form
˙
X = r
˙
θ sin φ − r
˙
ψ cos φ sin θ (4.208)
˙
Y =−r
˙
θ cos φ − r
˙
ψ sin φ sin θ (4.209)
These equations are integrated to obtain X (t) and Y (t).
In this example, we have shown how the general dynamical equation can be applied using
quasi-velocities to obtain a minimum set of differential equations describing the motion of
a relatively complex nonholonomic system. This was accomplished without solving for the
constraint forces.

246 Equations of motion: differential approach
4.5 A fundamental equation
System of particles
Let us consider a system of N particles that are described by d’Alembert’s principle in the
form
N
i=1
(F
i
− m
i
˙
v
i
) ·δr
i
= 0 (4.210)
where r
i
is the inertial position vector of the ith particle, v
i
≡
˙
r
i
, and F
i
is the applied force
acting on that particle. The δrs are consistent with any constraints.
Now suppose we express the configuration of the system by using nqs with m linear
nonholonomic equations of constraint. The particle velocities are given in terms of (n − m)
independent quasi-velocities, that is,
v
i
=
n−m
j=1
γ
ij
(q, t)u
j
+ γ
it
(q, t) (4.211)
and we find that
δr
i
=
n−m
j=1
γ
ij
(q, t)δθ
j
(4.212)
where θ
j
is a quasi-coordinate associated with u
j
. The corresponding generalized force is
Q
j
=
N
i=1
F
i
· γ
ij
( j = 1,...,n − m) (4.213)
so (4.210) takes the form
n−m
j=1
Q
j
−
N
i=1
m
i
˙
v
i
· γ
ij
δθ
j
= 0 (4.214)
The δθs are independent, so we obtain
N
i=1
m
i
˙
v
i
· γ
ij
= Q
j
( j = 1,...,n − m) (4.215)
in agreement with (4.133).
Next, consider the constrained kinetic energy, written in terms of independent quasi-
velocities.
T (q, u, t) =
1
2
N
i=1
m
i
v
i
· v
i
(4.216)
247 A fundamental equation
where v
i
= v
i
(q, u, t). We find that
∂T
∂u
j
=
N
i=1
m
i
v
i
·
∂v
i
∂u
j
=
N
i=1
m
i
v
i
· γ
ij
( j = 1,...,n − m) (4.217)
Then
d
dt
∂T
∂u
j
=
N
i=1
m
i
(
˙
v
i
· γ
ij
+ v
i
· ˙γ
ij
) (4.218)
or
N
i=1
m
i
˙
v
i
· γ
ij
=
d
dt
∂T
∂u
j
−
N
i=1
m
i
v
i
· ˙γ
ij
( j = 1,...,n − m) (4.219)
Finally, from (4.215) and (4.219) we obtain
d
dt
∂T
∂u
j
−
N
i=1
m
i
v
i
· ˙γ
ij
= Q
j
( j = 1,...,n − m) (4.220)
This is a fundamental dynamical equation for a system of particles. It results in (n − m)
first-order dynamical equations which are supplemented by the n first-order kinematical
equations for the
˙
qs. These (2n − m) equations are solved for the (n − m) us and nqsas
functions of time.
Notice that the dynamical equations are identical to those obtained by the Boltzmann–
Hamel equation but the procedure here is far simpler. Furthermore, the kinetic energy
T (q, u, t) is written for the constrained rather than the unconstrained system.
System of rigid bodies
Let us generalize the results for a system of N particles to a system of N rigid bodies. Let
us choose the reference point for each rigid body at the center of mass. Then in accordance
with Koenig’s theorem, the kinetic energy is
T (q, u, t) =
1
2
N
i=1
(m
i
v
ci
· v
ci
+ ω
i
· I
ci
· ω
i
) (4.221)
where v
ci
is the velocity of the center of mass of the ith body and I
ci
is its inertia dyadic
about the center of mass. The (n − m) us are independent.
We see that
∂T
∂u
j
=
N
i=1
(m
i
v
ci
· γ
ij
+ ω
i
· I
ci
· β
ij
)(j = 1,...,n − m) (4.222)
where
γ
ij
=
∂v
ci
∂u
j
, β
ij
=
∂ω
i
∂u
j
(4.223)
248 Equations of motion: differential approach
Hence, we obtain
d
dt
∂T
∂u
j
=
N
i=1
[m
i
˙
v
ci
· γ
ij
+ (I
ci
· ˙ω
i
+ ω
i
× I
ci
· ω
i
) ·β
ij
]
+
N
i=1
(m
i
v
ci
· ˙γ
ij
+ ω
i
· I
ci
·
˙
β
ij
)(j = 1,...,n − m) (4.224)
Now recall the general dynamical equation for center-of-mass reference points, that is, for
ρ
ci
= 0. From (4.142), we have
N
i=1
[m
i
˙
v
ci
· γ
ij
+ (I
ci
· ˙ω
i
+ ω
i
× I
ci
· ω
i
) ·β
ij
] = Q
j
( j = 1,...,n − m) (4.225)
Finally, from (4.224) and (4.225), we obtain
d
dt
∂T
∂u
j
−
N
i=1
(m
i
v
ci
· ˙γ
ij
+ ω
i
· I
ci
·
˙
β
ij
) = Q
j
( j = 1,...,n − m) (4.226)
This is a fundamental equation for a system of rigid bodies. Using the kinetic energy
T (q, u, t)fortheconstrained system, it results in a minimum set of (n − m) first-order
dynamical equations.
An alternate form of (4.226) is
d
dt
∂T
∂u
j
−
N
i=1
(p
i
· ˙γ
ij
+ H
ci
·
˙
β
ij
) = Q
j
( j = 1,...,n − m) (4.227)
where p
i
is the linear momentum of the i th body and H
ci
is its angular momentum about
its center of mass. This form of the equation is more flexible in that the angular momentum
may be expressed in terms of arbitrary unit vectors rather than being tied to the body-fixed
unit vectors of the inertia dyadic. This is particularly useful in the dynamic analysis of
axially symmetric bodies.
If we compare (4.227) with the Boltzmann–Hamel equation, as given by (4.82), we find
that
N
i=1
(p
i
· ˙γ
ir
+ H
ci
·
˙
β
ir
) =
n
i=1
∂T
∂q
i
ir
−
N
i=1
n
j=1
n
k=1
n−m
l=1
∂T
∂u
j
∂
ji
∂q
k
−
∂
jk
∂q
i
kl
ir
u
l
−
n
i=1
n
j=1
n
k=1
∂T
∂u
j
∂
ji
∂q
k
−
∂
jk
∂q
i
kt
ir
−
n
i=1
n
j=1
∂T
∂u
j
∂
ji
∂t
−
∂
jt
∂q
i
ir
(r = 1,...,n − m) (4.228)
where T (q, u, t) is written for the unconstrained system. Since the differential equations
of motion produced by the two methods are identical, we conclude that the fundamental