Greenwood D.T. Advanced Dynamics
Подождите немного. Документ загружается.

219 Maggi’s equation
φ
j
(q, t) = 0 (4.10)
and (4.6) applies, where
ji
=
∂φ
j
∂q
i
,
jt
=
∂φ
j
∂t
(4.11)
Using the notation of (4.5) and (4.6), virtual displacements are constrained in accordance
with
δθ
j
=
n
i=1
ji
(q, t)δq
i
= 0(j = n − m + 1,...,n) (4.12)
In velocity space, we have
n
i=1
ji
(q, t)δw
i
= 0(j = n − m + 1,...,n) (4.13)
implying that any virtual velocity δw lies in the common intersection of the constraint planes
in velocity space.
4.2 Maggi’s equation
Derivation of Maggi’s equation
Consider a mechanical system whose configuration is described by nqs and which has m
nonholonomic constraints with the linear form of (4.6). One approach to the problem of
obtaining differential equations of motion is to use Lagrange’s equation in the multiplier
form of (2.49), namely,
d
dt
∂T
∂
˙
q
i
−
∂T
∂q
i
= Q
i
+
n
j=n−m+1
λ
j
ji
(i = 1,...,n) (4.14)
These n second-order equations plus the m first-order constraint equations comprise a
total of (n + m) equations to solve for the nqs and m λs as functions of time. Frequently,
however, one is not interested in the λ solutions, and would prefer a method which eliminates
the λs from the beginning. The use of Maggi’s equation is one such method.
Let us begin with Lagrange’s principle, that is,
n
i=1
d
dt
∂T
∂
˙
q
i
−
∂T
∂q
i
− Q
i
δq
i
= 0 (4.15)
where the δqs satisfy the virtual constraints of (4.12) and we note that the kinetic energy
T (q,
˙
q, t) is written for the unconstrained system. The virtual displacements of quasi-
coordinates and true coordinates are related by
δθ
j
=
n
i=1
ji
(q, t)δq
i
( j = 1,...,n) (4.16)
220 Equations of motion: differential approach
or, upon inversion,
δq
i
=
n−m
j=1
ij
(q, t)δθ
j
(i = 1,...,n) (4.17)
where, from (4.12), the last m δθs are equal to zero.
Now substitute this expression for δq
i
into (4.15). We obtain
n−m
j=1
n
i=1
d
dt
∂T
∂
˙
q
i
−
∂T
∂q
i
− Q
i
ij
δθ
j
= 0 (4.18)
The first (n − m) δθsareindependent so each coefficient must equal zero. The result is
Maggi’s equation (1896).
n
i=1
d
dt
∂T
∂
˙
q
i
−
∂T
∂q
i
ij
=
n
i=1
Q
i
ij
( j = 1,...,n − m) (4.19)
The term on the right represents the generalized applied force associated with the quasi-
coordinate δθ
j
. The set of Maggi equations are (n − m) second-order differential equations
in (q,
˙
q,
¨
q, t). In addition, there are m equations of constraint, making a total of n equations
to solve for the nqs as functions of time.
The
ji
coefficients are not unique but are chosen in such a way that the first (n − m)
δθs are independent and are consistent with the constraints. In the resulting Φ matrix, each
column represents the amplitude ratios of an independent set of δqs which could be used
in Lagrange’s principle, equation (4.15). Maggi’s equation uses the first (n − m) columns
of Φ to obtain the (n − m) differential equations of motion.
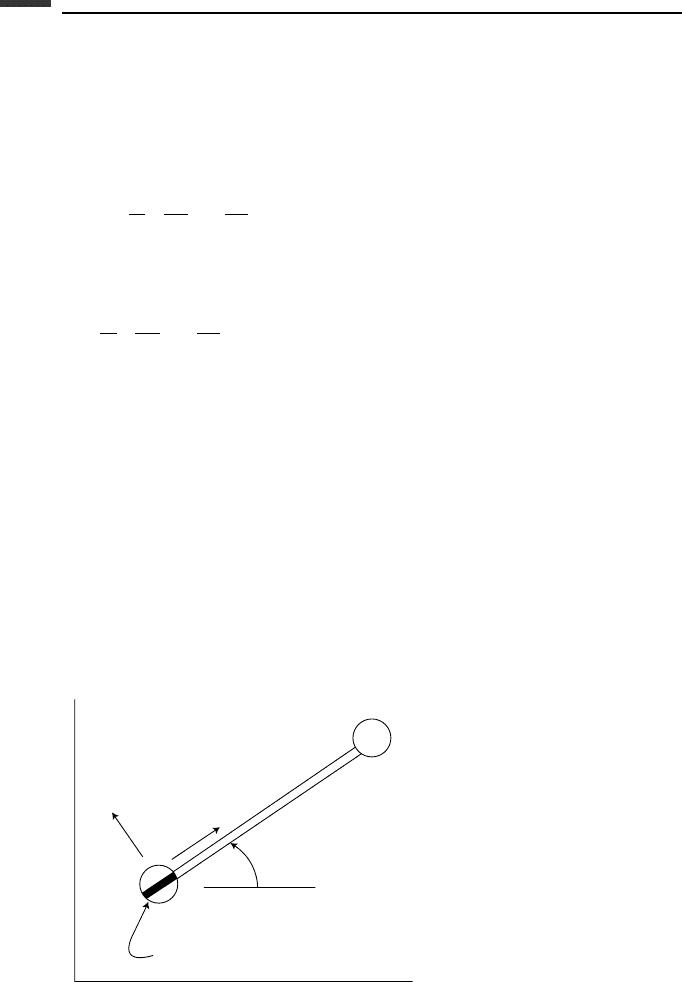
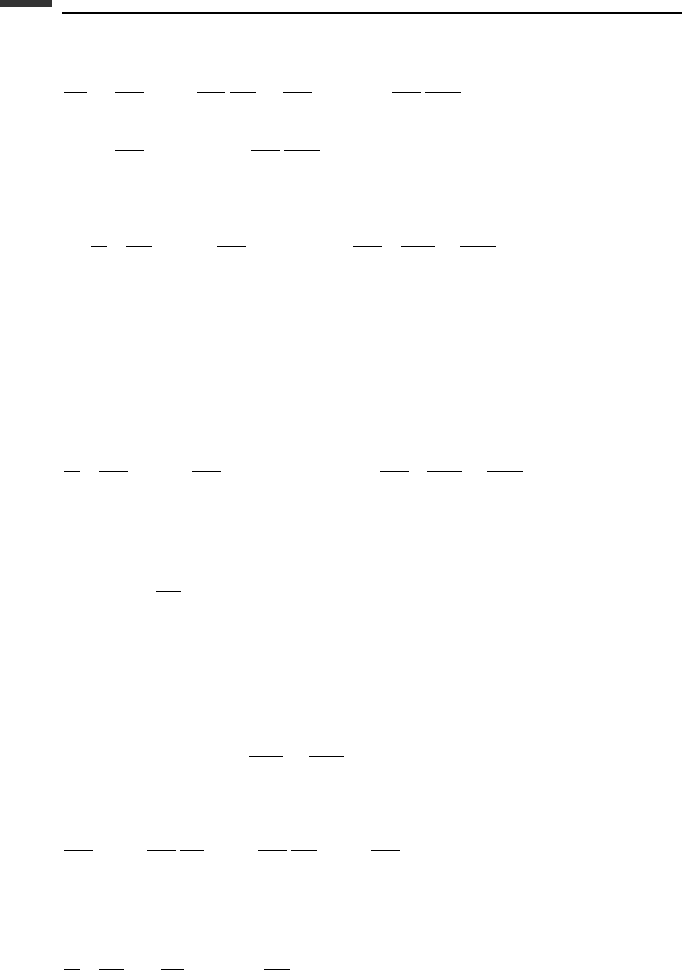
Example 4.1 Two particles, each of mass m, are connected by a massless rod of length l
(Fig. 4.1). There is a knife-edge constraint at particle 1 which prevents a velocity component
perpendicular to the rod at that point. We wish to use Maggi’s equation to find the differential
equations of motion.
y
x
m
m
v
l
φ
u
3
(x, y)
1
2
Figure 4.1.

221 Maggi’s equation
Let (x , y,φ) be chosen as generalized coordinates. As quasi-velocities (us) let us take
u
1
= v =
˙
x cos φ +
˙
y sin φ (4.20)
u
2
=
˙
φ (4.21)
u
3
=−
˙
x sin φ +
˙
y cos φ = 0 (4.22)
where u
3
= 0 is the nonholonomic constraint equation and (u
1
, u
2
) are independent. Thus,
we obtain the coefficient matrix
Ψ =
cos φ sin φ 0
001
−sin φ cos φ 0
(4.23)
for the unconstrained system. The inverse matrix is
Φ = Ψ
−1
=
cos φ 0 −sin φ
sin φ 0 cos φ
01 0
(4.24)
We shall use Maggi’s equation, (4.19), in the form
3
i=1
d
dt
∂T
∂
˙
q
i
−
∂T
∂q
i
ij
= 0(j = 1, 2) (4.25)
because all Qs are equal to zero. The unconstrained kinetic energy is obtained by using
(3.140). It is
T = m
˙
x
2
+
˙
y
2
+
1
2
l
2
˙
φ
2
−l
˙
x
˙
φ sin φ + l
˙
y
˙
φ cos φ
(4.26)
We find that
d
dt
∂T
∂
˙
x
= m(2
¨
x −l
¨
φ sin φ − l
˙
φ
2
cos φ),
∂T
∂x
= 0 (4.27)
d
dt
∂T
∂
˙
y
= m(2
¨
y +l
¨
φ cos φ − l
˙
φ
2
sin φ),
∂T
∂y
= 0 (4.28)
d
dt
∂T
∂
˙
φ
= m(l
2
¨
φ −l
¨
x sin φ + l
¨
y cos φ − l
˙
x
˙
φ cos φ − l
˙
y
˙
φ sin φ) (4.29)
∂T
∂φ
= m(−l
˙
x
˙
φ cos φ − l
˙
y
˙
φ sin φ) (4.30)
The first equation of motion, using Maggi’s equation and involving (4.27), (4.28) and the
first column of the Φ matrix, is
m(2
¨
x −l
¨
φ sin φ − l
˙
φ
2
cos φ) cos φ + m(2
¨
y +l
¨
φ cos φ − l
˙
φ
2
sin φ) sin φ = 0
222 Equations of motion: differential approach
or
m(2
¨
x cos φ + 2
¨
y sin φ − l
˙
φ
2
) = 0 (4.31)
The second equation of motion, involving the second column of the Φ matrix, is
d
dt
∂T
∂
˙
φ
−
∂T
∂φ
= m(l
2
¨
φ −l
¨
x sin φ + l
¨
y cos φ) = 0 (4.32)
In addition, (4.22), the constraint equation, can be differentiated with respect to time to
yield,
¨
x sin φ −
¨
y cos φ +
˙
x
˙
φ cos φ +
˙
y
˙
φ sin φ = 0 (4.33)
In equations (4.31)–(4.33) we have three equations linear in the
¨
qs. Thus, we can solve for
¨
x,
¨
y,
¨
φ which are then integrated numerically to obtain the response as a function of time.
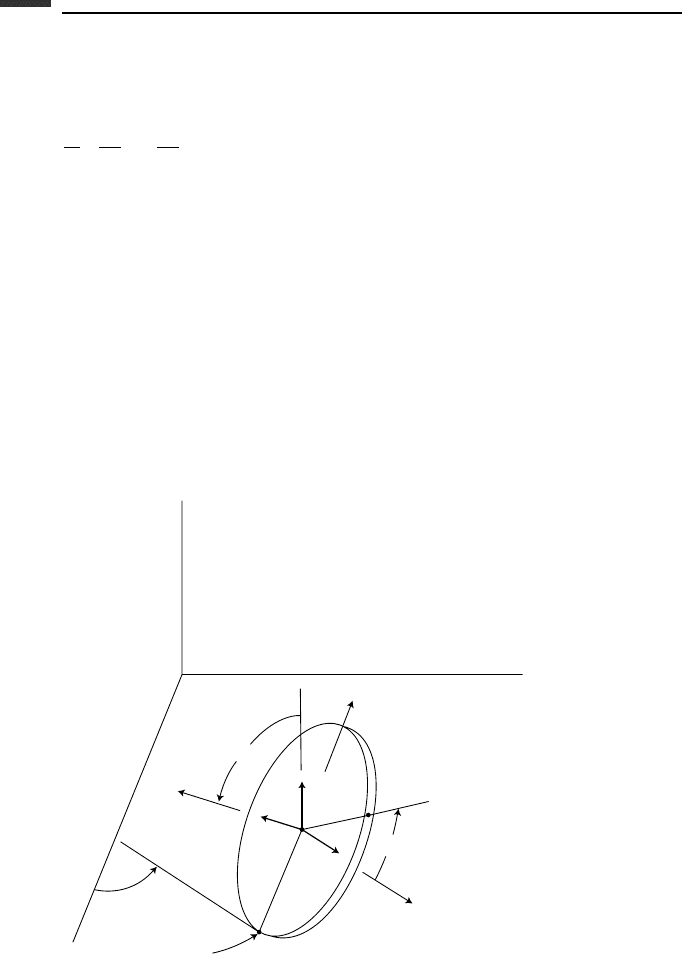
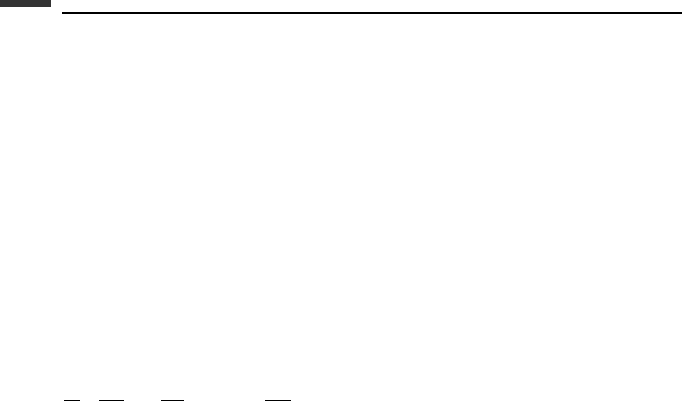
Example 4.2 Now consider a more complex problem, the rolling motion of a disk on
a horizontal plane. Suppose that the classical Euler angles (φ,θ,ψ) are used to specify
the orientation of a disk of mass m and radius r, whose contact point C has Cartesian
coordinates (x , y), (Fig. 4.2).
Let us choose the independent us to be the Euler angle rates. Thus,
u
1
=
˙
φ, u
2
=
˙
θ, u
3
=
˙
ψ (4.34)
z
x
θ
r
m
P
(x, y)
y
e
d
e
θ
⭈
⭈
⭈
φ
e
ψ
C
Figure 4.2.

223 Maggi’s equation
The constraint equations, which enforce no slipping at the contact point, are
u
4
=
˙
x +r
˙
ψ cos φ = 0 (4.35)
u
5
=
˙
y +r
˙
ψ sin φ = 0 (4.36)
Maggi’s equation is
n
i=1
d
dt
∂T
∂
˙
q
i
−
∂T
∂q
i
ij
=
n
i=1
Q
i
ij
( j = 1,...,n − m) (4.37)
where, in this case, the only nonzero Q is
Q
2
=−mgr cos θ (4.38)
The coefficients in (4.34)–(4.36) result in
Ψ =
10 0 00
01 0 00
00 1 00
00r cos φ 10
00r sin φ 01
(4.39)
for the order (
˙
φ,
˙
θ,
˙
ψ,
˙
x,
˙
y). The inverse matrix is
Φ = Ψ
−1
=
10 0 00
01 0 00
00 1 00
00−r cos φ 10
00−r sin φ 01
(4.40)
In terms of the Cartesian unit vectors i, j, k, the velocity of the center of the unconstrained
disk is
v = (
˙
x −r
˙
φ cos φ cos θ + r
˙
θ sin φ sin θ)i
+(
˙
y −r
˙
φ sin φ cos θ − r
˙
θ cos φ sin θ)j +r
˙
θ cos θ k (4.41)
The angular velocity is
ω = (
˙
φ cos θ +
˙
ψ)e
ψ
+
˙
θe
θ
+
˙
φ sin θ e
d
(4.42)
In accordance with Koenig’s theorem, the kinetic energy is
T =
1
2
mv
2
+
1
2
ω · I · ω (4.43)
224 Equations of motion: differential approach
where the axial and transverse moments of inertia are
I
a
=
1
2
mr
2
, I
t
=
1
4
mr
2
(4.44)
about the center of the disk. Thus, the total unconstrained kinetic energy is
T =
1
2
m(
˙
x
2
+
˙
y
2
) +
1
8
mr
2
˙
φ
2
(1 +5 cos
2
θ) +
5
8
mr
2
˙
θ
2
+
1
4
mr
2
˙
ψ
2
+
1
2
mr
2
˙
φ
˙
ψ cos θ − mr
˙
x
˙
φ cos φ cos θ + mr
˙
x
˙
θ sin φ sin θ
−mr
˙
y
˙
φ sin φ cos θ − mr
˙
y
˙
θ cos φ sin θ (4.45)
Next, let us apply the Lagrangian operator with respect to each of the generalized coor-
dinates. We obtain
d
dt
∂T
∂
˙
φ
−
∂T
∂φ
=
1
4
mr
2
¨
φ(1 +5 cos
2
θ) +
1
2
mr
2
¨
ψ cos θ
−mr
¨
x cos φ cos θ − mr
¨
y sin φ cos θ
−
5
2
mr
2
˙
φ
˙
θ sin θ cos θ −
1
2
mr
2
˙
θ
˙
ψ sin θ (4.46)
d
dt
∂T
∂
˙
θ
−
∂T
∂θ
=
5
4
mr
2
¨
θ + mr
¨
x sin φ sin θ − mr
¨
y cos φ sin θ
+
5
4
mr
2
˙
φ
2
sin θ cos θ +
1
2
mr
2
˙
φ
˙
ψ sin θ (4.47)
d
dt
∂T
∂
˙
ψ
−
∂T
∂ψ
=
1
2
mr
2
¨
ψ +
1
2
mr
2
¨
φ cos θ −
1
2
mr
2
˙
φ
˙
θ sin θ (4.48)
d
dt
∂T
∂
˙
x
−
∂T
∂x
= m
¨
x −mr
¨
φ cos φ cos θ
+mr
¨
θ sin φ sin θ + mr
˙
φ
2
sin φ cos θ
+mr
˙
θ
2
sin φ cos θ + 2mr
˙
φ
˙
θ cos φ sin θ (4.49)
d
dt
∂T
∂
˙
y
−
∂T
∂y
= m
¨
y − mr
¨
φ sin φ cos θ
−mr
¨
θ cos φ sin θ − mr
˙
φ
2
cos φ cos θ
−mr
˙
θ
2
cos φ cos θ + 2mr
˙
φ
˙
θ sin φ sin θ (4.50)
A substitution into (4.37), using the first three columns of the Φ matrix, yields the Maggi
equations. The φ equation is
1
4
mr
2
¨
φ(1 +5 cos
2
θ) +
1
2
mr
2
¨
ψ cos θ − mr
¨
x cos φ cos θ
−mr
¨
y sin φ cos θ −
5
2
mr
2
˙
φ
˙
θ sin θ cos θ −
1
2
mr
2
˙
θ
˙
ψ sin θ = 0 (4.51)
225 Maggi’s equation
The θ equation is
5
4
mr
2
¨
θ + mr
¨
x sin φ sin θ − mr
¨
y cos φ sin θ
+
5
4
mr
2
˙
φ
2
sin θ cos θ +
1
2
mr
2
˙
φ
˙
ψ sin θ =−mgr cos θ (4.52)
The ψ equation is
1
2
mr
2
¨
ψ +
3
2
mr
2
¨
φ cos θ −
5
2
mr
2
˙
φ
˙
θ sin θ − mr(
¨
x cos φ +
¨
y sin φ) = 0 (4.53)
There are two additional equations obtained by differentiating the constraint equations
(4.35) and (4.36) with respect to time.
¨
x +r
¨
ψ cos φ − r
˙
φ
˙
ψ sin φ = 0 (4.54)
¨
y +r
¨
ψ sin φ + r
˙
φ
˙
ψ cos φ = 0 (4.55)
In (4.51)–(4.55) we have five differential equations which are linear in the
¨
qs. They can
be solved for the
¨
qs and then integrated to yield the motion as given by φ,θ,ψ, x and y as
functions of time.
A simplification can be made if we solve (4.54) for
¨
x and (4.55) for
¨
y, and then substitute
into the Maggi equations. In (4.51) we find that
−mr cos θ(
¨
x cos φ +
¨
y sin φ) = mr
2
¨
ψ cos θ (4.56)
and the φ equation reduces to
1
4
mr
2
¨
φ(1 +5 cos
2
θ) +
3
2
mr
2
¨
ψ cos θ
−
5
2
mr
2
˙
φ
˙
θ sin θ cos θ −
1
2
mr
2
˙
θ
˙
ψ sin θ = 0 (4.57)
Similarly,
mr sin θ(
¨
x sin φ −
¨
y cos φ) = mr
2
˙
φ
˙
ψ sin θ (4.58)
and the θ equation becomes
5
4
mr
2
¨
θ +
5
4
mr
2
˙
φ
2
sin θ cos θ +
3
2
mr
2
˙
φ
˙
ψ sin θ =−mgr cos θ (4.59)
Finally, from (4.53) and (4.56), we find that the ψ equation is
3
2
mr
2
¨
ψ +
3
2
mr
2
¨
φ cos θ −
5
2
mr
2
˙
φ
˙
θ sin θ = 0 (4.60)
In (4.57), (4.59), and (4.60) we have reduced the original set of five differential equations
to three dynamical equations in the Euler angles. This is a minimum set for this system.
226 Equations of motion: differential approach
4.3 The Boltzmann–Hamel equation
We have seen that the Lagrangian approach does not produce correct equations of motion
if the kinetic energy is expressed in terms of quasi-velocities rather than true velocities.
The question arises whether we can add terms to Lagrange’s equation to produce correct
equations in this more general case. The answer is yes, but at the cost of some additional
complications.
Derivation
Let us consider an unconstrained system whose kinetic energy is expressed in the form
T (q,
˙
q, t), that is, using true velocities (
˙
qs). We know that the fundamental form of La-
grange’s equation applies, namely,
d
dt
∂T
∂
˙
q
i
−
∂T
∂q
i
= Q
i
(i = 1,...,n) (4.61)
We wish to introduce quasi-velocities (us) in place of the
˙
qs. To accomplish this aim, let
us first assume scleronomic transformation equations of the form
u
j
=
n
i=1
ji
(q)
˙
q
i
( j = 1,...,n) (4.62)
or, conversely,
˙
q
i
=
n
j=1
ij
(q)u
j
(i = 1,...,n) (4.63)
The kinetic energy will be the same in value, whether expressed in terms of
˙
qsorus, but
will be different in form. So let us write
T
∗
(q, u, t) = T (q,
˙
q, t) (4.64)
where T
∗
is the kinetic energy expressed in terms of quasi-velocities.
First, let us consider
∂T
∂
˙
q
i
=
n
j=1
∂T
∗
∂u
j
∂u
j
∂
˙
q
i
=
n
j=1
∂T
∗
∂u
j
ji
(4.65)
Thus, we obtain
d
dt
∂T
∂
˙
q
i
=
n
j=1
d
dt
∂T
∗
∂u
j
ji
+
n
j=1
n
k=1
∂T
∗
∂u
j
∂
ji
∂q
k
˙
q
k
(4.66)
Then, using (4.63),
d
dt
∂T
∂
˙
q
i
=
n
j=1
d
dt
∂T
∗
∂u
j
ji
+
n
j=1
n
k=1
n
l=1
∂T
∗
∂u
j
∂
ji
∂q
k
kl
u
l
(4.67)
227 The Boltzmann–Hamel equation
Furthermore, we see that
∂T
∂q
i
=
∂T
∗
∂q
i
+
n
j=1
∂T
∗
∂u
j
∂u
j
∂q
i
=
∂T
∗
∂q
i
+
n
j=1
n
k=1
∂T
∗
∂u
j
∂
jk
∂q
i
˙
q
k
=
∂T
∗
∂q
i
+
n
j=1
n
k=1
n
l=1
∂T
∗
∂u
j
∂
jk
∂q
i
kl
u
l
(4.68)
Thus, starting with Lagrange’s equation (4.61), and using (4.67) and (4.68), we obtain
n
j=1
d
dt
∂T
∂u
j
ji
−
∂T
∗
∂q
i
+
n
j=1
n
k=1
n
l=1
∂T
∗
∂u
j
∂
ji
∂q
k
−
∂
jk
∂q
i
kl
u
l
= Q
i
(4.69)
where Q
i
is the generalized applied force associated with q
i
.
Next, multiply (4.69) by
ir
and sum over i.Now
n
i=1
ji
ir
= δ
jr
(4.70)
since Φ = Ψ
−1
and δ
jr
is the Kronecker delta. Thus we obtain the result that
d
dt
∂T
∗
∂u
r
−
n
i=1
∂T
∗
∂q
i
ir
+
n
i=1
n
j=1
n
k=1
n
l=1
∂T
∗
∂u
j
∂
ji
∂q
k
−
∂
jk
∂q
i
kl
ir
u
l
= Q
∗
r
(r = 1,...,n) (4.71)
where
Q
∗
r
=
n
i=1
Q
i
∂
˙
q
i
∂u
r
=
n
i=1
Q
i
ir
(4.72)
is the generalized applied force associated with the quasi-velocity u
r
.
Equation (4.71) is the basic result, giving the n differential equations of motion in terms
of quasi-velocities. For convenience, however, we shall introduce notation which will give
it a simpler appearance. First, we define the Hamel coefficients
γ
j
rl
(q) =−γ
j
lr
≡
n
i=1
n
k=1
∂
ji
∂q
k
−
∂
jk
∂q
i
kl
ir
(4.73)
Let us use the notation
∂T
∗
∂θ
r
=
n
i=1
∂T
∗
∂q
i
∂q
i
∂θ
r
=
n
i=1
∂T
∗
∂q
i
∂
˙
q
i
∂u
r
=
n
i=1
∂T
∗
∂q
i
ir
(4.74)
Finally, for convenience, let us drop the asterisks, but assume that T = T (q, u, t). Then
(4.71) has the form
d
dt
∂T
∂u
r
−
∂T
∂θ
r
+
n
j=1
n
l=1
∂T
∂u
j
γ
j
rl
u
l
= Q
r
(r = 1,...,n) (4.75)
228 Equations of motion: differential approach
This is the Boltzmann–Hamel equation, published in 1904, for systems described in terms
of quasi-velocities, and assuming independent qs and us. Notice that the added term, com-
pared to Lagrange’s equation, actually involves a quadruple summation, implying increased
complexity. On the other hand, if the us are true velocities, then (4.62) is integrable for all
j and thus all the γ
j
rl
parameters vanish. Then (4.75) reduces to Lagrange’s equation with
the θs representing true coordinates.
Now consider a scleronomic system with m nonholonomic constraints. The last mus
are chosen such that the constraints are applied by setting these mus equal to zero,
that is,
u
j
=
n
i=1
ji
(q)
˙
q
i
= 0(j = n − m + 1,...,n) (4.76)
Equation (4.75) is still valid, except that there are now only (n − m) independent us, cor-
responding to the (n − m) degrees of freedom. Thus, we have
d
dt
∂T
∂u
r
−
∂T
∂θ
r
+
n
j=1
n−m
l=1
∂T
∂u
j
γ
j
rl
u
l
= Q
r
(r = 1,...,n − m) (4.77)
In addition to these (n − m) first-order dynamical equations, there are n first-order kine-
matical equations of the form
˙
q
i
=
n−m
j=1
ij
(q)u
j
(i = 1,...,n) (4.78)
Thus, there are a total of (2n − m) first-order differential equations to solve for the nqs and
the (n − m) nonzero us.
This is a minimal set of equations. One should note that the kinetic energy T (q, u, t)
must be written for the full, unconstrained set of nus. All n partial derivatives of the form
∂T /∂u
j
must be calculated. After this has been completed, the last mus can be set equal
to zero.
A generalization of the Boltzmann–Hamel equation can be obtained for systems in which
the equations for the ushavetherheonomic form
u
j
=
n
i=1
ji
(q, t)
˙
q
i
+
jt
(q, t)(j = 1,...,n − m) (4.79)
u
j
=
n
i=1
ji
(q, t)
˙
q
i
+
jt
(q, t) = 0(j = n − m + 1,...,n) (4.80)
Again, the last m equations represent nonholonomic constraints, in general. In addition, we
have
˙
q
i
=
n−m
j=1
ij
(q, t)u
j
+
it
(q, t)(i = 1,...,n) (4.81)