Greenwood D.T. Advanced Dynamics
Подождите немного. Документ загружается.

209 Problems
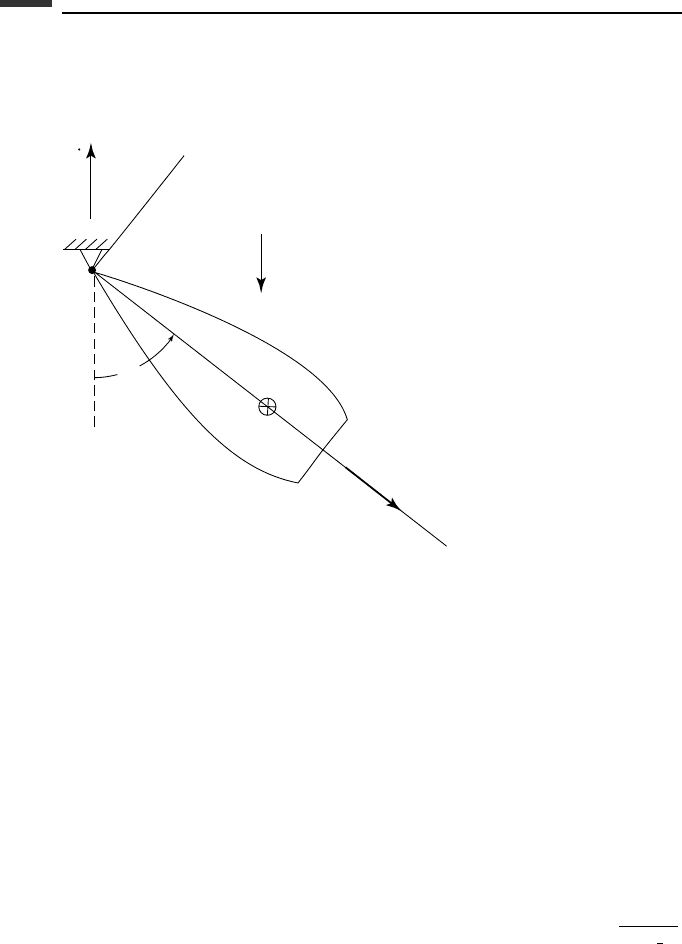
and the xy-plane is vertical. (a) Find the θ and φ differential equations of motion. (b)
Assume the initial conditions θ (0) = 60
◦
,
˙
θ(0) =
˙
φ(0) = 0, ω
x
(0) = and solve for
the minimum value of θ during the motion. Assume that I
2
a
2
= 2I
t
mgl.
g
y
O
m
c.m.
x
φ
θ
Ω
l
Figure P 3.10.
3.11. A rigid body with xyz principal body axes is suspended by a massless gimbal system
associated with type I Euler angles. The outer gimbal can rotate freely about the
vertical ψ-axis. Assume that the inner gimbal is locked relative to the outer gimbal,
and the Euler angle θ is constant. A motor drives the rigid body relative to the inner
gimbal and produces a constant moment Q
φ
about the x-axis. Assume axial symmetry,
that is, I
xx
= I
a
, I
yy
= I
zz
= I
t
. (a) Write the differential equations of motion. (b)
Show that the vertical angular momentum is constant, even though Q
φ
has a vertical
component. Explain.
3.12. A dumbbell consists of particles A and B, each of mass m, connected by a massless
rigid rod of length l (Fig. P 3.12). It can slide without friction on a fixed spherical
depression of radius r under the influence of gravity. The configuration of the system
is given by the type II Euler angles (φ,θ,ψ), where ψ is the angle between the rod
AB and the vertical plane which includes the center O and the center of mass. Note
that the center of mass of the dumbbell moves on a sphere of radius R =
r
2
−
1
4
l
2
.
Obtain the equations of motion using the Lagrangian method.
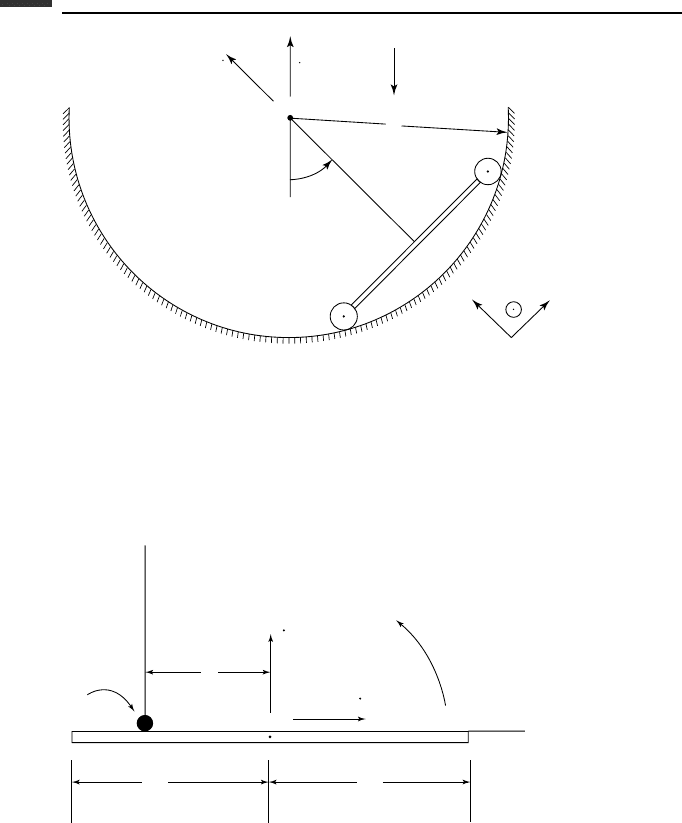
210 Kinematics and dynamics of a rigid body
g
O
R
m
m
A
B
k
j
i
r
1
2
–
l
1
2
–
l
y
f
θ
Figure P 3.12.
3.13. A rod of mass m and length l is in general planar motion when it has inelastic impact
withasmoothfixedpegP at a distance a from the center. The initial conditions just
before impact are
˙
x(0) =
˙
x
0
,
˙
y(0) =
˙
y
0
, ω(0) = ω
0
. Solve for the velocity components
(
˙
x,
˙
y) of the center of mass as well as the angular velocity ω just after impact.
y
a
ω
0
x
x
0
mP
peg
1
2
–
l
1
2
–
l
y
0
Figure P 3.13.
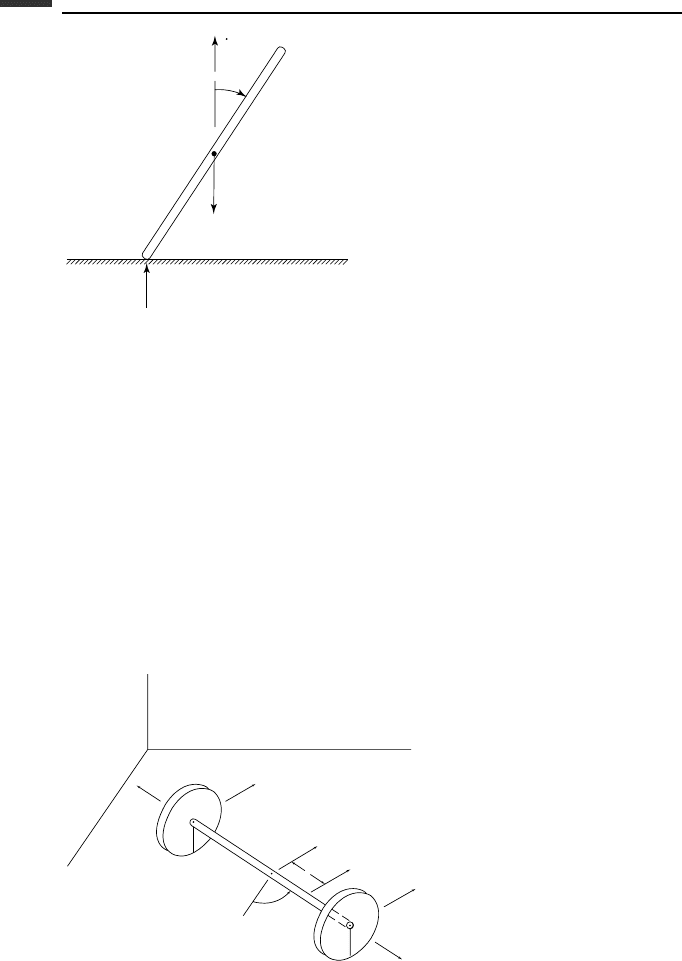
3.14. The angles (θ,φ) describe the orientation of a uniform rod of mass m and length
l which is spinning with one end in contact with a smooth floor (Fig. P 3.14). (a)
Use the Routhian method to obtain a differential equation of the form
¨
θ(θ,
˙
θ) = 0.
(b) Assume the initial conditions θ (0) = 45
◦
,
˙
θ(0) = 0,
˙
φ(0) = ω
0
and solve for the
initial value of the floor reaction N .
211 Problems
1
2
–
l
1
2
–
l
mg
φ
θ
N
Figure P 3.14.
3.15. An axially-symmetric top with mass m, and with axial and transverse moments of
inertia I
a
and I
t
, respectively, about the center of mass has a total spin rate about its
symmetry axis. Its center of mass is located at a distance l from its point O which can
slide without friction on a horizontal floor. (a) Use type I Euler angles as coordinates
and the modified Euler equations to obtain the θ and ψ equations of motion. (b) Let
I
a
= ml
2
/12, I
t
= ml
2
/6, and
2
= 72g/l. Assume that the top is initially vertical
and is disturbed slightly. Solve for θ
min
in the motion which follows. (c) What is the
precession rate
˙
ψ when θ = θ
min
?
3.16. Two thin disks, each of mass m and radius r , are connected by a thin rigid axle of
mass m
0
and length L, and roll without slipping on the horizontal xy-plane. (a) Using
(v,
˙
φ) as velocity variables, find the kinetic energy and the mass matrix. (b) If the
system is initially at rest, solve for v and
˙
φ due to a transverse horizontal impulse
ˆ
F
which is applied to the axle at a distance c from its center.
Ω
B
Ω
A
v
B
v
A
m
B
r
m
0
c
1
2
–
L
1
2
–
L
m
A
r
z
y
x
F
^
v
φ
Figure P 3.16.
212 Kinematics and dynamics of a rigid body
3.17. A rod of mass m and length l is dropping vertically with speed v
0
and angular velocity
ω
0
, when end A hits a smooth floor inelastically at y = 0. Solve for the values of
˙
x
and
˙
θ immediately after impact, as well as the constraint impulse.
θ
y
ω
0
B
m
l
(x, y)
A
x
v
0
Figure P 3.17.
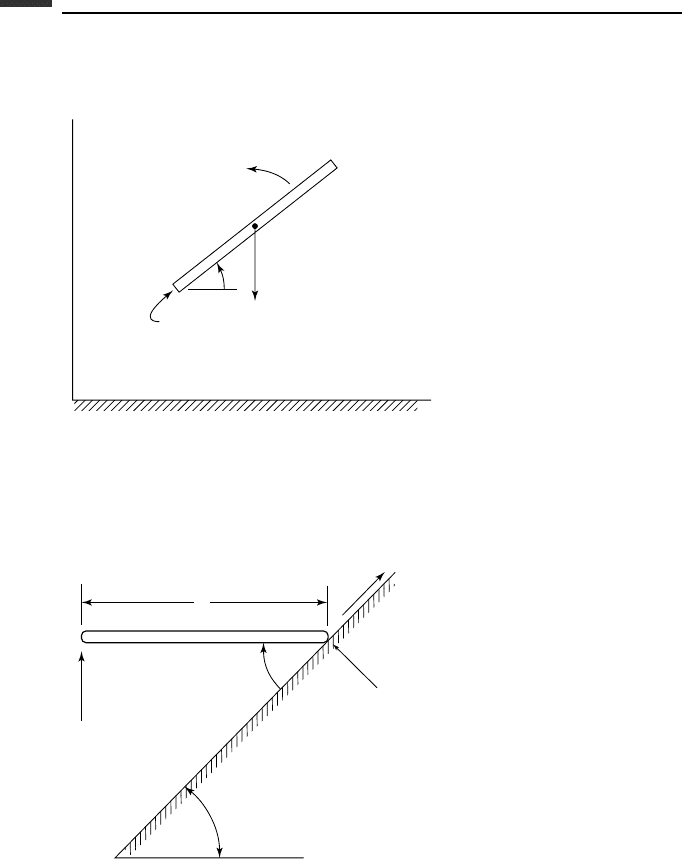
3.18. A uniform rod of mass m and length l is at rest with θ = 45
◦
and end B touching
a smooth plane surface. Then a transverse impulse
ˆ
F is applied at end A. (a) Solve
for u
1
and u
2
≡
˙
θ immediately after the impulse. (b) Find the value of the constraint
impulse
ˆ
C. End B remains in contact with the plane.
A
l
u
1
C
^
F
^
B
m
45°
θ
Figure P 3.18.
3.19. A dumbbell is released from the position shown in Fig. P 3.19 and slides without
friction down a circular track of radius R. Assume that the dumbbell length l << R
and keep terms to first order in l/R. Find the angular velocity of the dumbbell when:
(a) particle 1 leaves the track; (b) particle 2 leaves the track.
213 Problems
m
l
m
g
O
2
1
R
Figure P 3.19.
3.20. A thin disk of mass m and radius r is spinning at ω
0
=
√
g/r about a vertical diameter
on a frictionless floor. Then it is disturbed slightly. (a) Find the maximum value of the
angle θ between the plane of the disk and the vertical in the motion which follows.
(b) What is the minimum value of ω
0
for stability of the initial motion?
3.21. A thin horizontal rectangular plate is translating downward (into page) with a velocity
v
0
when its corner A is suddenly stopped at a fixed point. Assuming the rigid plate
can rotate freely about A, solve for its angular velocity ω and the velocity v
c
of its
center immediately after impact.
y
A
O
C
x
1
2
a
1
2
a
1
2
b
1
2
b
Figure P 3.21.
214 Kinematics and dynamics of a rigid body
3.22. A dumbbell is composed of two smooth spheres, each of mass m, radius r, and central
moment of inertia I
c
=
2
5
mr
2
. They are connected by a rigid massless rod of length
L. Just before perfectly elastic impact the dumbbell has a longitudinal velocity v
0
at
an angle 45
◦
relative to the floor. (a) Solve for the velocities of the two spheres just
after impact. (b) What is the angular impulse applied to sphere 1 about its center? (c)
Solve for the shear impulse normal to the rod.
m
r
L
e
l
e
t
m
r
e = 1
1
2
v
0
45°
Figure P 3.22.
3.23. A system consists of three rods, each of mass m and length l, which are connected by
joints at B and C. The system is initially motionless with θ
1
= θ
3
= 45
◦
and θ
2
= 0
when the velocities v
1
and v
2
are suddenly applied, as shown. Solve for the resulting
immediate values of
˙
θ
1
,
˙
θ
2
and
˙
θ
3
.
j
i
A
m
l
l
m
B
C
l
m
D
v
1
θ
1
θ
2
θ
3
v
2
Figure P 3.23.
3.24. A uniform rod of mass m and length l has a fixed spherical joint at end B (Fig. P 3.24).
End C rests against a vertical wall having a friction coefficient µ. The rod can rotate
with a constant angle α about a horizontal axis AB which is perpendicular to the wall.
(a) Obtain the differential equation for the position angle θ. (b) Assume µ =0,α =
30
◦
with the initial conditions θ(0) = 0,
˙
θ(0) = 0. The rod is disturbed slightly
in the positive θ direction. Solve for the angle θ at which the rod leaves the wall.
215 Problems
µ
θ
α
g
C
A
l
B
Figure P 3.24.
3.25. End B of a uniform rod of mass m and length l is initially at rest and then is hit
by an impulse
ˆ
F at an angle α from the transverse direction, as shown. (a) Find the
resulting velocity at B and the driving-point mass
m associated with
ˆ
F. (b) Show that
the kinetic energy is T =
1
2m
ˆ
F
2
.
j
i
BA
m
F
α
^
l
Figure P 3.25.
3.26. Find the input mass at A for the directions u
1
and u
2
(Fig. P 3.26). There is a pin joint
at B connecting the two rods.
216 Kinematics and dynamics of a rigid body
u
3
C
l
m
Bm
l
A
u
1
u
2
Figure P 3.26.
3.27. Two rods, each of mass m and length l are connected by a joint at B and move in a
horizontal plane. A knife-edge constraint requires that any motion at A be perpen-
dicular to the rod. Choose (x, y,θ
1
,θ
2
) as generalized coordinates and obtain three
second-order differential equations of motion by using Jourdain’s principle.
y
A
l
(x, y)
B
l
C
x
θ
1
θ
2
Figure P 3.27.

4
Equations of motion: differential approach
In the previous chapters, we have considered relatively familiar methods of obtaining the
differential equations of motion for a mechanical system. In this chapter, we shall introduce
a number of other methods, partly in order to give the student a broader view of dynamics,
and partly to present some practical and efficient approaches to obtaining the differential
equations of motion. The results presented here are applicable to holonomic and nonholo-
nomic systems alike, but the emphasis will be on nonholonomic systems because greater
insight is needed in finding applicable theoretical approaches for these systems. As we pro-
ceed, we will show the advantages of using quasi-velocities in the analysis of nonholonomic
systems.
4.1 Quasi-coordinates and quasi-velocities
Transformation equations
It is often possible to simplify the analysis of dynamical systems by using quasi-velocities
(us) rather than
˙
qs as velocity variables. An example is the use of Euler’s equations for
the rotational motion of a rigid body. Here the velocity variables are the body-axis com-
ponents of the angular velocity ω rather than Euler angle rates. The ω components are
quasi-velocities, whereas the Euler angle rates are true
˙
qs whose time integrals result in
generalized coordinates. As we showed in Chapter 3, the Euler equations are simpler than
the corresponding Lagrange equations written in terms of Euler angles and Euler angle
rates.
The transformation equations relating the us and
˙
qs can be obtained by starting with the
differential form
dθ
j
=
n
i=1
ji
(q, t) dq
i
+
jt
(q, t) dt ( j = 1,...,n) (4.1)
where the θs are called quasi-coordinates and dθ
j
= u
j
dt or u
j
=
˙
θ
j
. In general, the right-
hand expressions in (4.1) are not integrable; if they were integrable, the θswouldbetrue
generalized coordinates.
218 Equations of motion: differential approach
If (4.1) is divided by dt, it has the form
u
j
=
n
i=1
ji
(q, t)
˙
q
i
+
jt
(q, t)(j = 1,...,n) (4.2)
as in (3.245). We assume that these n equations can be solved for the
˙
qs, resulting in
˙
q
i
=
n
j=1
ij
(q, t)u
j
+
it
(q, t)(i = 1,...,n) (4.3)
Notice that for this unconstrained case, there are the same number of us and
˙
qs. For
example, the rotational dynamics of a rigid body might have ω
x
,ω
y
,ω
z
as us and the Euler
angles ψ, θ, φ as qs. The dynamical equations would be written in terms of us and then the
qs would be generated by integrating (4.3) which are kinematic equations.
Constraints
Now let us impose m nonholonomic constraints of the linear form
n
i=1
a
ji
(q, t)
˙
q
i
+ a
jt
(q, t) = 0(j = 1,...,m) (4.4)
as in (1.15). This will be accomplished by changing the notation and setting the last mus
in (4.2) equal to zero. Thus, we can write
u
j
=
n
i=1
ji
(q, t)
˙
q
i
+
jt
(q, t)(j = 1,...,n − m) (4.5)
u
j
=
n
i=1
ji
(q, t)
˙
q
i
+
jt
(q, t) = 0(j = n − m + 1,...,n) (4.6)
The first (n − m) usareindependent quasi-velocities, while the last mus are set equal to
zero to enforce the m nonholonomic constraints.
As before, we assume that the (n × n) Ψ matrix is invertible and we can solve for the
˙
qs
in the form
˙
q
i
=
n−m
j=1
ij
(q, t)u
j
+
it
(q, t)(i = 1,...,n) (4.7)
The upper limit on the summation is (n − m) because the last mus are equal to zero. Note
that the (n × n) matrix Φ is
Φ = Ψ
−1
(4.8)
Furthermore,
it
=−
n
j=1
ij
jt
(i = 1,...,n) (4.9)
If there are any holonomic constraints, we have