Greenwood D.T. Advanced Dynamics
Подождите немного. Документ загружается.


169 Basic rigid body dynamics
essentially a three-dimensional plot which gives the value of 1/
√
I for any axis passing
through the origin of the xyz frame. The major axis is the axis having the minimum moment
of inertia. Similarly, the minor axis is the axis having the maximum moment of inertia; it
is perpendicular to the major axis. These two axes plus an orthogonal third axis constitute
the set of three principal axes corresponding to the principal moments of inertia. The
orientations of the three principal axes are such that all products of inertia are equal to zero.
This means that the inertial coupling terms associated with products of inertia dissappear
and, for example, the generalized Euler equations (3.162) simplify to the standard equations
of (3.164).
Suppose we are given a general inertia dyadic I and we wish to calculate the principal
moments of inertia of the body. If a rigid body is rotating about a principal axis, then its
angular velocity and angular momentum are parallel, that is
H = I · ω = I ω (3.181)
where the proportionality constant I on the right is a principal moment of inertia.
Equation (3.181) has the form of an eigenvalue problem. In terms of dyadics we have
I − I U
· ω = 0 (3.182)
or, using matrix notation,
(I
xx
− I ) I
xy
I
xz
I
yx
(I
yy
− I ) I
yz
I
zx
I
zy
(I
zz
− I )
ω
x
ω
y
ω
z
=
0
(3.183)
We assume that ω = 0, so the determinant of the coefficients must equal zero, that is,
(I
xx
− I ) I
xy
I
xz
I
yx
(I
yy
− I ) I
yz
I
zx
I
zy
(I
zz
− I )
= 0
(3.184)
This determinant yields a cubic equation in I known as the characteristic equation. Its three
real roots are the three principal moments of inertia.
For each root I the direction of the corresponding principal axis is found by solving
(3.183) for the ratios of the components of ω. These axes are also the principal axes of the
inertia ellipsoid of the body.
Example 3.3 Consider a rigid body having an inertia matrix
I =
28 −8 −4
−828−4
−4 −424
kg·m
2
(3.185)
with respect to a body-fixed xyz frame. We wish to solve for the principal moments of
inertia and the directions of the corresponding principal axes. The characteristic equation
170 Kinematics and dynamics of a rigid body
is obtained from (3.184). It is
(28 − I ) −8 −4
−8(28− I ) −4
−4 −4(24− I )
= 0
(3.186)
or
I
3
− 80 I
2
+ 2032 I − 16 128 = 0 (3.187)
The roots of this characteristic equation are the values of the principal moments of inertia.
In increasing magnitude, they are
I
1
= 16, I
2
= 28, I
3
= 36 kg·m
2
(3.188)
The corresponding axis directions are obtained from (3.183), namely,
(28 − I )ω
x
− 8ω
y
− 4ω
z
= 0
−8ω
x
+ (28 − I )ω
y
− 4ω
z
= 0 (3.189)
−4ω
x
− 4ω
y
+ (24 − I )ω
z
= 0
All three equations must be satisfied, but usually any two equations are sufficient to solve
for the ω ratios.
Assuming that no principal axis lies in the yz-plane, let us set ω
x
= 1. Then, for I
1
= 16
we obtain ω
x
= ω
y
= ω
z
= 1. For I
2
= 28 the result is ω
x
= ω
y
= 1, ω
z
=−2. The result
for I
3
= 36 is ω
x
= 1, ω
y
=−1, ω
z
= 0. Now let us normalize each set of ωstogivea
unit vector magnitude, resulting in a set of direction cosines for each principal axis. The
direction cosines can be combined to form the three rows of a rotation matrix C for rotation
from an original xyz frame to the principal x
y
z
frame. A system of labeling for the primed
axes which requires the least rotation is obtained by placing the most positive terms on the
main diagonal of C, possibly by multiplying a row by −1. We obtain
−
1
√
3
1
√
3
1
√
3
1
√
2
1
√
2
0
−1
√
6
−1
√
6
2
√
6
(3.190)
One can check that the principal moments of inertia are obtained from
I
= CIC
T
(3.191)
Also, to be sure of a right-handed principal coordinate system, one should check that the
determinant |C|=1.
Modified Euler equations
Sometimes it is convenient to use a rotational equation having a form similar to (3.161)
but being different in that strict body axes are not used. In general, suppose that H and M

171 Basic rigid body dynamics
are expressed in terms of unit vectors associated with a Cartesian frame having an angular
velocity ω
c
. Then the rotational equation has the vector form
(
˙
H)
r
+ ω
c
× H = M (3.192)
where (
˙
H)
r
is the time derivative of total angular momentum H , as viewed from the rotating
frame and assuming that the unit vectors fixed in this frame have time derivatives equal to
zero.
An important application of this approach occurs in the case of an axially symmetric
rigid body. Let us assume that the x -axisofanxyz frame is the axis of symmetry, and the
reference point is chosen at the center of mass or at an inertially fixed point on the axis
of symmetry. Let I
a
be the moment of inertia about the symmetry axis, whereas I
t
is the
moment of inertia about any transverse axis at the reference point.
Now suppose that the body rotates about the axis of symmetry with an angular velocity
or spin rate s measured relative to the xyz frame. If we let the angular velocity of the xyz
frame be
ω
c
= ω
x
i + ω
y
j + ω
z
k (3.193)
we see that the angular momentum of the body is
H = I
a
(ω
x
+ s)i + I
t
ω
y
j + I
t
ω
z
k (3.194)
Also,
(
˙
H)
r
= I
a
(˙ω
x
+
˙
s)i + I
t
˙ω
y
j + I
t
˙ω
z
k (3.195)
Then, substituting into (3.192), we obtain the modified Euler equations:
I
a
(˙ω
x
+
˙
s) = I
a
˙ω = M
x
I
t
˙ω
y
− (I
t
− I
a
)ω
z
ω
x
+ I
a
sω
z
= M
y
(3.196)
I
t
˙ω
z
+ (I
t
− I
a
)ω
x
ω
y
− I
a
sω
y
= M
z
where the total spin , which is the total angular velocity about the symmetry axis, is
= ω
x
+ s (3.197)
Until now the relative spin s has been arbitrary. For example, if we set s = 0, the modified
Euler equations revert to ordinary Euler equations for an axially symmetric body. But we
can choose s in such a way that the kinematics of solving for the orientation of axially
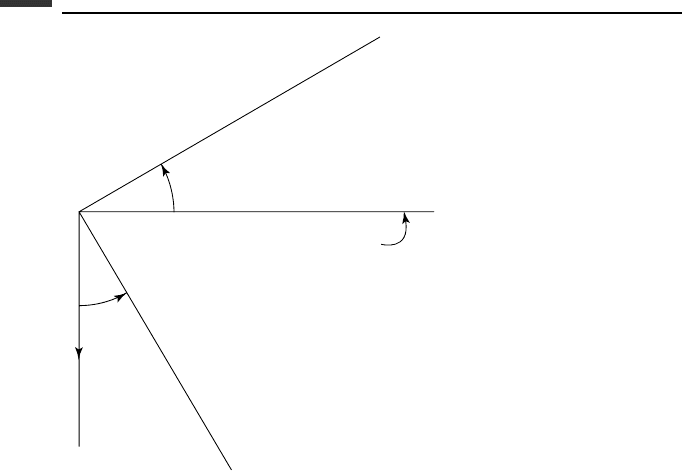
symmetric body is relatively easy. Let us use type I Euler angles and let ψ and θ specify
the orientation of the xyz frame. The inertial XYZ frame is chosen so that the XY-plane is
horizontal and the Z-axis is positive downward. Since the third Euler angle φ does not
affect the orientation of the xyz frame, its y-axis remains horizontal. This implies that the
horizontal component of ω
c
must lie along the y-axis, and we have the constraint equation
(see Fig. 3.7)
ω
x
cos θ + ω
z
sin θ = 0 (3.198)
172 Kinematics and dynamics of a rigid body
Z
z
XY plane
x
θ
θ
y
.
Figure 3.7.
or
ω
x
=−ω
z
tan θ (3.199)
where we note that the xz-plane is vertical. The vertically downward component of ω
c
is
˙
ψ, that is,
˙
ψ =−ω
x
sin θ + ω
z
cos θ = ω
z
sec θ (3.200)
Also, we have
˙
θ = ω
y
(3.201)
˙
φ = s = − ω
x
= + ω
z
tan θ (3.202)
Now let us eliminate ω
x
and s from (3.196) and the modified Euler equations have the form
I
a
˙ω = M
x
(3.203)
I
t
˙ω
y
+ I
t
ω
2
z
tan θ + I
a
ω
z
= M
y
(3.204)
I
t
˙ω
z
− I
t
ω
y
ω
z
tan θ − I
a
ω
y
= M
z
(3.205)
These three first-order dynamical equations plus the three first-order kinematical equations
(3.200)–(3.202) can be integrated numerically to obtain the Euler angles as functions of
time. Thus, we have obtained relatively simple equations for the rotational motion of an

173 Basic rigid body dynamics
axially-symmetric body. Note that the third terms in (3.204) and (3.205) are gyroscopic
coupling terms.
Another approach is to write the dynamical equations directly in terms of type I Euler
angles and their time derivatives. One can use
=
˙
φ −
˙
ψ sin θ (3.206)
ω
y
=
˙
θ (3.207)
ω
z
=
˙
ψ cos θ (3.208)
and then (3.203)–(3.205) take the form
I
a
(
¨
φ −
¨
ψ sin θ −
˙
ψ
˙
θ cos θ ) = M
x
(3.209)
I
t
(
¨
θ +
˙
ψ
2
sin θ cos θ ) + I
a
˙
ψ(
˙
φ −
˙
ψ sin θ ) cos θ = M
y
(3.210)
I
t
(
¨
ψ cos θ − 2
˙
ψ
˙
θ sin θ ) − I
a
˙
θ(
˙
φ −
˙
ψ sin θ ) = M
z
(3.211)
These three second-order dynamical equations are somewhat more complicated than those
obtained earlier in (3.203)–(3.205).
Finally, let us consider the rather common situation in which there is no applied moment
about the axis of symmetry, that is,
M
x
= 0 (3.212)
Then there are only two first-order dynamical equations, namely,
I
t
˙ω
y
+ I
t
ω
2
z
tan θ + I
a
ω
z
= M
y
(3.213)
I
t
˙ω
z
− I
t
ω
y
ω
z
tan θ − I
a
ω
y
= M
z
(3.214)
where the total spin is constant.IfM
y
and M
z
are known as functions of (ψ, θ, t),
these dynamic equations plus the kinematic equations (3.200) and (3.201) can be integrated
numerically to give the orientation of the axis of symmetry as a function of time.
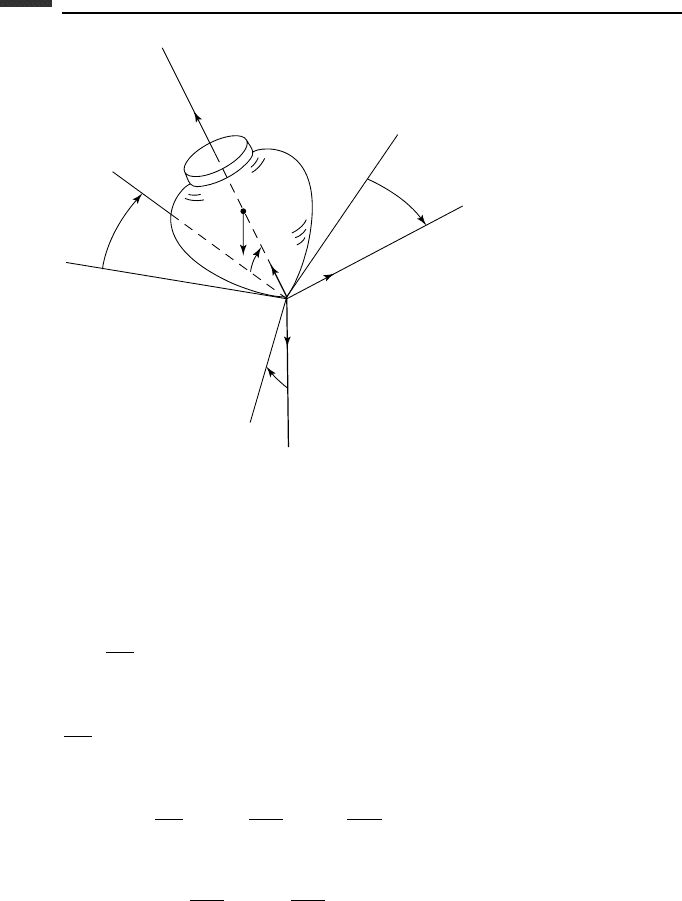
Example 3.4 As an example of an axially symmetric body with no moment applied about
its axis of symmetry, consider the motion of a top with a fixed point under the action of
gravity (Fig. 3.8). The top has a constant total spin and its center of mass lies at distance
l from its fixed point O.
The differential equations of motion, obtained from (3.204) and (3.205), are
I
t
˙ω
y
+ I
t
ω
2
z
tan θ + I
a
ω
z
=−mgl cos θ (3.215)
I
t
˙ω
z
− I
t
ω
y
ω
z
tan θ − I
a
ω
y
= 0 (3.216)
and we recall that
˙
θ = ω
y
(3.217)
Let us consider the case of a top with a large spin and assume that the axis of symmetry
remains nearly horizontal, that is, θ is small. In addition, assume that ω
y
and ω
z
are small.
174 Kinematics and dynamics of a rigid body
Ω
f
θ
q
y
θ
ψ
ψ
y
Y
c.m.
mg
l
O
x
z
Z
X
.
.
.
Figure 3.8.
Then, neglecting higher-order terms, (3.215) and (3.216) take the linear forms
I
t
˙ω
y
+ I
a
ω
z
=−mgl (3.218)
I
t
˙ω
z
− I
a
ω
y
= 0 (3.219)
Now differentiate (3.219) with respect to time, obtaining
˙ω
y
=
I
t
I
a
¨ω
z
(3.220)
and substitute into (3.218). The result is
I
2
t
I
a
¨ω
z
+ I
a
ω
z
=−mgl (3.221)
This differential equation has a solution of the general form
ω
z
=
˙
ψ =−
mgl
I
a
+ A cos
I
a
t
I
t
+ B sin
I
a
t
I
t
(3.222)
Then, from (3.219) we find that
ω
y
=
˙
θ =−A sin
I
a
t
I
t
+ B cos
I
a
t
I
t
(3.223)
where the constants A and B are evaluated from initial conditions.
As a specific example, consider the case of cuspidal motion of a fast-spinning top or
gyroscope and assume that its symmetry axis is nearly horizontal. We have the initial
175 Basic rigid body dynamics
conditions
ω
y
(0) = ω
z
(0) = 0 (3.224)
and obtain the solutions
ω
y
=
˙
θ =−
mgl
I
a
sin
I
a
t
I
t
(3.225)
ω
z
=
˙
ψ =−
mgl
I
a
1 −cos
I
a
t
I
t
(3.226)
Assuming the initial condition θ(0) = 0, (3.225) can be integrated to yield
θ =−
I
t
mgl
I
2
a
2
1 −cos
I
a
t
I
t
(3.227)
We have assumed that θ is small and is large. More specifically, let us now assume
that
2
>> I
t
mgl/I
2
a
. Then ω
y
and ω
z
will also be small, as we have assumed.
Aplotofθ versus ψ indicates that a point on the symmetry axis follows a cycloidal path
with upward-pointing cusps. The average precession rate is mgl/I
a
and the frequency of
the sinusoidal nutational oscillation in θ is I
a
/I
t
.
Example 3.5 Let us use Euler’s equations to solve for the rotational motion of a rigid body
under the action of a constant applied moment relative to the body axes. Assume that the
principal moments of inertia are I
xx
<
1
2
I
yy
<
1
2
I
zz
. There is a constant applied moment
M
z
about the z-axis and we assume that the initial conditions and the magnitude of M
z
are
such that ω
x
>> (ω
y
,ω
z
).
The Euler equations in this instance are
I
xx
˙ω
x
+ (I
zz
− I
yy
)ω
y
ω
z
= 0 (3.228)
I
yy
˙ω
y
− (I
zz
− I
xx
)ω
x
ω
z
= 0 (3.229)
I
zz
˙ω
z
+ (I
yy
− I
xx
)ω
x
ω
y
= M
z
(3.230)
Since ω
y
and ω
z
are small, (3.228) can be approximated by ˙ω
x
= 0or
ω
x
= (3.231)
where is a constant. Then a differentiation of (3.229) with respect to time results in
¨ω
y
=
I
zz
− I
xx
I
yy
˙ω
z
(3.232)
where, from (3.230),
˙ω
z
=−
I
yy
− I
xx
I
zz
ω
y
+
M
z
I
zz
(3.233)
Thus we obtain
¨ω
y
+
(I
yy
− I
xx
)(I
zz
− I
xx
)
I
yy
I
zz
2
ω
y
=
I
zz
− I
xx
I
yy
I
zz
M
z
(3.234)
176 Kinematics and dynamics of a rigid body
The solution of this linear differential equation has the form
ω
y
= C
1
cos λt +C
2
sin λt +
M
z
(I
yy
− I
xx
)
(3.235)
where the natural frequency is
λ =
(I
yy
− I
xx
)(I
zz
− I
xx
)
I
yy
I
zz
(3.236)
Then, from (3.229),
ω
z
=
I
yy
(I
zz
− I
xx
)
˙ω
y
=
I
yy
λ
(I
zz
− I
xx
)
(C
2
cos λt −C
1
sin λt) (3.237)
As a specific example, let us assume the initial conditions ω
y
(0) = ω
z
(0) = 0. Then
C
1
=−
M
z
(I
yy
− I
xx
)
, C
2
= 0 (3.238)
and we obtain the solutions
ω
y
=
M
z
(I
yy
− I
xx
)
(
1 −cos λt
)
(3.239)
ω
z
=
M
z
I
zz
λ
sin λt (3.240)
Since and λ are large, we see that ω
y
and ω
z
are small, in agreement with the earlier
assumption.
It is perhaps surprising that a constant applied moment about the z-axis produces an ω
z
which is periodic with average value zero rather than constantly increasing. A plot of ω
z
versus ω
y
is elliptical with its center on the ω
y
axis. Furthermore, notice from (3.236) that
if I
xx
is the intermediate principal moment of inertia, then the solutions for ω
y
and ω
z
are
no longer sinusoidal and they do not remain small.
Lagrange’s equations
The various forms of Lagrange’s equations such as (2.34), (2.37) and (2.49) are all useful
in obtaining equations of motion for a system involving one or more rigid bodies. There are
restrictions, however, on the use of Lagrange’s equations.
The first restriction is that a complete set of qs and
˙
qs must be used in writing the energy
functions T and V . This means that the chosen set of generalized coordinates must be able
to specify the configuration of the system, thereby specifying the locations of all particles
and mass elements of the system.
177 Basic rigid body dynamics
As an example, suppose we wish to use type I Euler angles as generalized coordinates in
the Lagrangian analysis of the rotational motion of an axially-symmetric body having no
applied moment about the axis of symmetry. The rotational kinetic energy can be written
in the form
T =
1
2
I
a
2
+
1
2
I
t
(
˙
θ
2
+
˙
ψ
2
cos
2
θ) (3.241)
where the moments of inertia are taken about the center of mass and the total spin is
constant. Let us apply Lagrange’s equation in the fundamental form
d
dt
∂T
∂
˙
q
i
−
∂T
∂q
i
= Q
i
(3.242)
where the qs are the Euler angles (ψ, θ, φ). If we assume that neither Q
ψ
nor Q
θ
are
functions of φ or
˙
φ, then it appears that the ψ and θ equations can be solved separately,
treating as a constant in the differentiations, and effectively reducing the number of
degrees of freedom to two.
This application of Lagrange’s equation would be incorrect, however, because the system
actually has three rotational degrees of freedom, but the third Euler angle φ has not entered
the analysis. Thus, we have not used a complete set of generalized coordinates. A correct
approach would be to substitute
=
˙
φ −
˙
ψ sin θ (3.243)
into (3.241) and obtain
T =
1
2
I
a
(
˙
φ −
˙
ψ sin θ )
2
+
1
2
I
t
(
˙
θ
2
+
˙
ψ
2
cos
2
θ) (3.244)
The use of this kinetic energy function in Lagrange’s equation (3.242) leads to correct
equations of motion. An alternate approach would be to notice that φ is an ignorable
coordinate and use the Routhian method.
The second restriction on the use of Lagrange’s equation in a form such as (3.242) is
that true
˙
qs must be used in writing the kinetic energy T (q,
˙
q, t), rather than using quasi-
velocities as velocity variables. A quasi-velocity u
j
is equal to a linear function of the
˙
qs
and has the form
u
j
=
n
i=1
ji
(q, t)
˙
q
i
+
jt
(q, t)(j = 1,...,n) (3.245)
where the right-hand side is not integrable.
A common example of quasi-velocities would be the body-axis components ω
x
,ω
y
,ω
z
of
the angular velocity ω of a rigid body. In terms of Euler angles, which are true coordinates,
we have
ω
x
=
˙
φ −
˙
ψ sin θ
ω
y
=
˙
ψ cos θ sin φ +
˙
θ cos φ (3.246)
ω
z
=
˙
ψ cos θ cos φ −
˙
θ sin φ
178 Kinematics and dynamics of a rigid body
and we see that the right-hand sides are not integrable. Assuming principal axes, the kinetic
energy due to rotation about the center of mass of a rigid body is
T =
1
2
I
xx
ω
2
x
+
1
2
I
yy
ω
2
y
+
1
2
I
zz
ω
2
z
(3.247)
However, a substitution into Lagrange’s equation (3.242), treating the ωsas
˙
qs, does not
result in correct equations of motion. Terms are missing. Thus, the correct Euler equations
of motion are not obtained by using Lagrange’s equation. It is possible, however, to expand
the Lagrange formulation to include the required terms. This is a topic to be discussed in
the next chapter.
Example 3.6 Let us obtain the differential equations for the rotational motion of a rigid
body, using type I Euler angles as generalized coordinates. We choose the center of mass as
the reference point and thereby decouple the translational and rotational motions. Assume
a principal axis system and arbitrary applied moments.
The rotational kinetic energy is found by substituting from (3.246) into (3.247) with the
result that
T =
1
2
I
xx
(
˙
φ −
˙
ψ sin θ )
2
+
1
2
I
yy
(
˙
ψ cos θ sin φ +
˙
θ cos φ)
2
+
1
2
I
zz
(
˙
ψ cos θ cos φ −
˙
θ sin φ)
2
(3.248)
The generalized momenta are
p
ψ
=
∂T
∂
˙
ψ
= [I
xx
sin
2
θ + (I
yy
sin
2
φ + I
zz
cos
2
φ) cos
2
θ]
˙
ψ
+[(I
yy
− I
zz
) cos θ sin φ cos φ]
˙
θ − I
xx
˙
φ sin θ
p
θ
=
∂T
∂
˙
θ
= (I
yy
− I
zz
)
˙
ψ cos θ sin φ cos φ + (I
yy
cos
2
φ + I
zz
sin
2
φ)
˙
θ (3.249)
p
φ
=
∂T
∂
˙
φ
= I
xx
(
˙
φ −
˙
ψ sin θ )
These equations have the matrix form
p = m
˙
q (3.250)
where the mass or inertia matrix is
m =
[I
xx
sin
2
θ + (I
yy
sin
2
φ
+ I
zz
cos
2
φ) cos
2
θ]
(I
yy
− I
zz
) cos θ sin φ cos φ −I
xx
sin θ
(I
yy
− I
zz
) cos θ sin φ cos φ I
yy
cos
2
φ + I
zz
sin
2
φ 0
−I
xx
sin θ 0 I
xx
(3.251)
for the order (ψ, θ, φ).