George W. Stimson introduction to Airborne Radar (Se)
Подождите немного. Документ загружается.

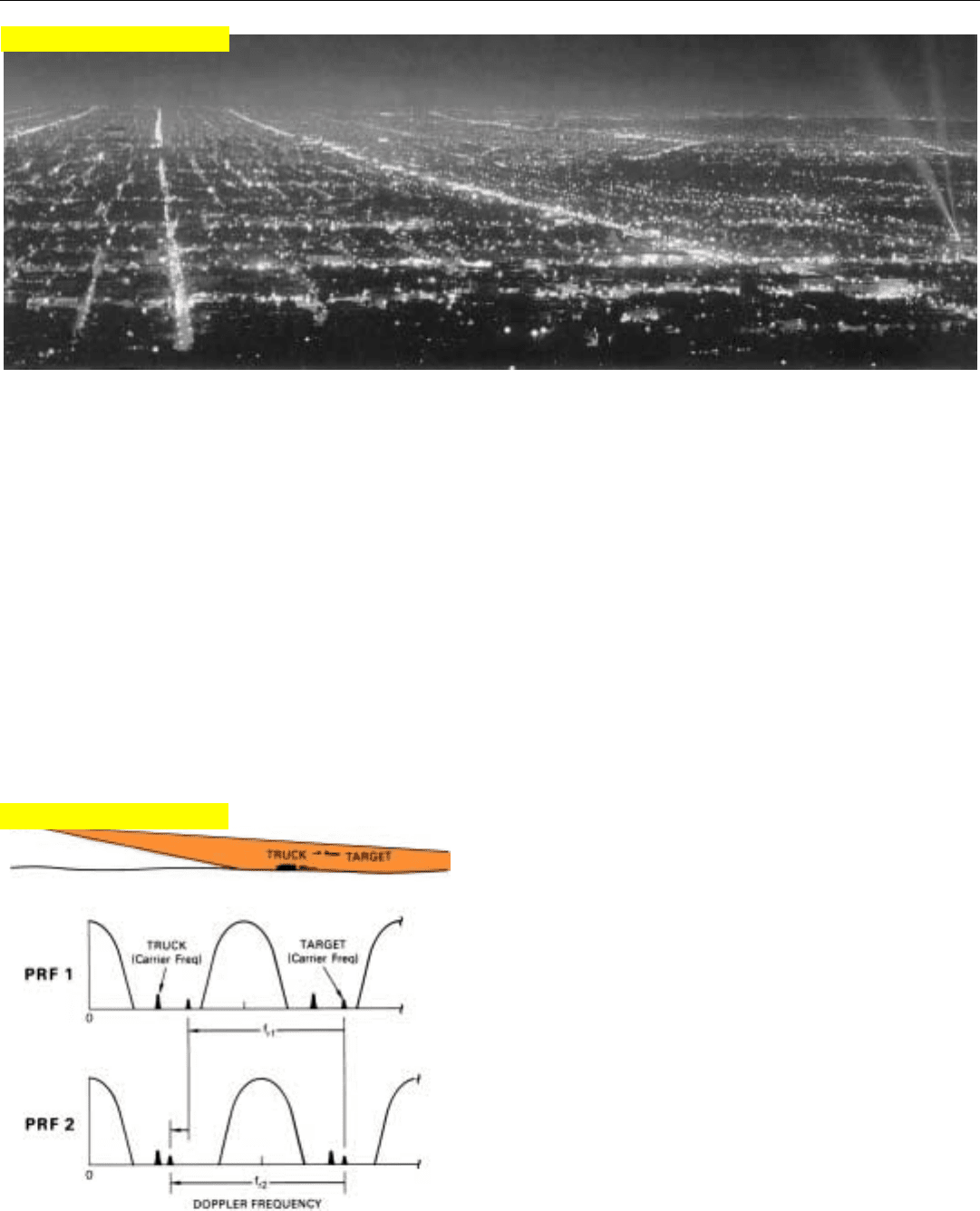
the desired range resolution (Fig. 30). Surprisingly, if this is
done in the absence of mainlobe clutter, a low PRF radar
can actually obtain greater search detection ranges than a
high PRF radar employing the same average power even
against nose hemisphere targets.
What makes the difference are the losses incurred by the
high PRF radar due to eclipsing—return being received
while the radar is transmitting and the receiver is blanked
out.
True, even at low PRFs, a considerable amount of return
may be lost as a result of eclipsing. But eclipsing is much
less of a problem at low PRFs than at medium and high
PRFs.
For as long as a returned pulse is not received at exactly
the same time as the transmitter is transmitting, some of the
pulse will get through to the receiver, and with low PRFs
only the return from zero range is so synchronized. As the
range increases the portion of the return getting through
increases. For targets at ranges greater than one pulse
length, none of the return is lost.
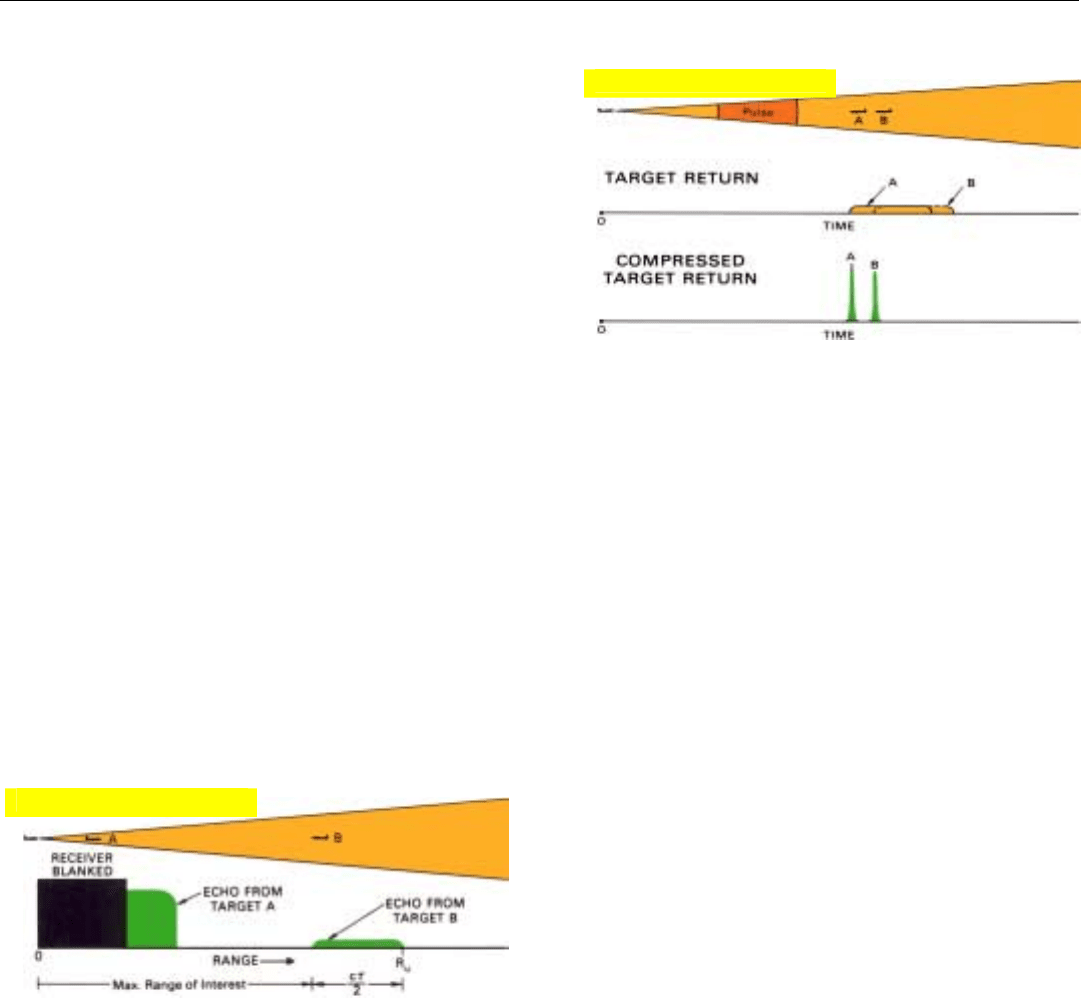
This is so, of course, only up to the point where the trail-
ing edge of the echo from a target at the maximum range of
interest is received as the leading edge of the next pulse is
being transmitted. In other words, the interpulse period
must be at least one pulse width longer than the round-trip
transit time for the most distant target of interest (Fig. 31).
CHAPTER 26 Low PRF Operation
351
31. To avoid eclipsing of long-range targets, the interpulse period
must be at least one pulsewidth longer than the transit time for
the most distant target of interest.
30. Duty factor can be increased by transmitting very long pulses
and using large amounts of pulse compression to obtain the
desired range resolution.
Provided this requirement is met, duty factors of up to 20
percent may be used by a radar operating at low PRFs with-
out incurring a significant eclipsing loss.
In contrast, at medium and high PRFs, because of range
ambiguities, the severity of eclipsing is independent of the
range from which the return is received. The eclipsing loss
increases directly with the duty factor.
Moving Targets on the Ground. In air-to-ground opera-
tions detecting ground moving targets (GMTs) may be a pri-
mary objective, but in air-to-air operations rejecting GMTs
Click for high-quality image
Click for high-quality image
PART VI Air-to-Air Operation
352
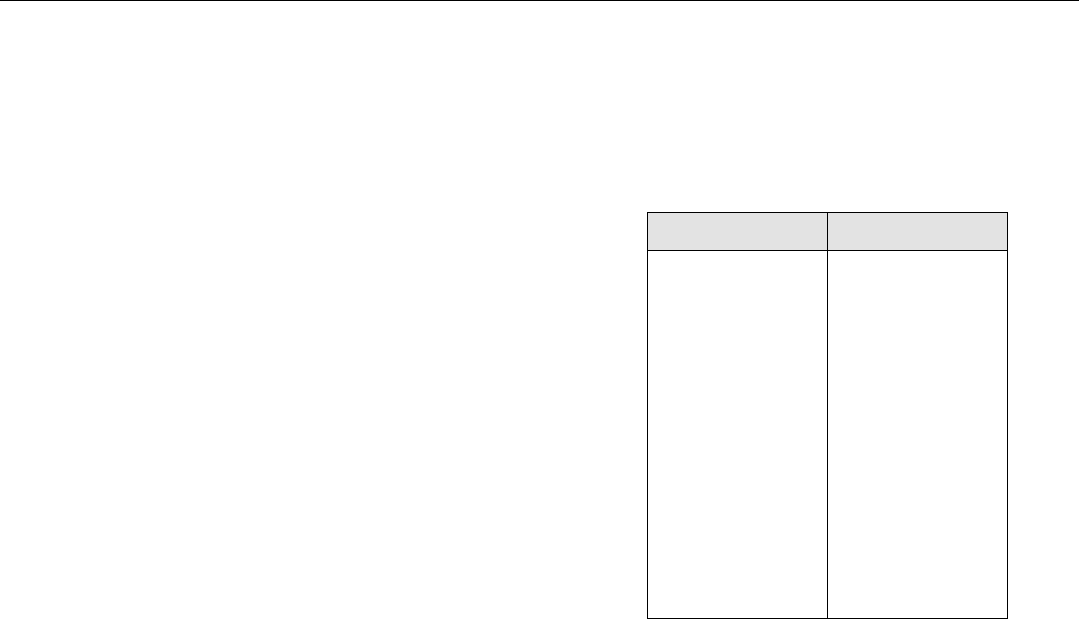
may be essential. When operating over territory where
there are hundreds of moving vehicles on the ground—
cars, trucks, trains, and so forth (Fig. 32, above)—a radar
may detect a great many more GMTs than airborne targets.
The GMTs may so clutter up the display that the operator
cannot discern his own targets among them—even though
the targets have been solidly detected and are clearly dis-
played.
If the separation between mainlobe clutter lines is suffi-
ciently wide, the number of filters at the ends of the
doppler filter bank whose outputs are not used can be
increased enough to exclude GMTs without rejecting an
unacceptable amount of possible target return.
If the lines are too closely spaced for this, the GMTs may
be identified by observing the effect of PRF switching on
their apparent doppler frequencies. Because of the greater
ground speeds of airborne targets, at such low PRFs an air-
craft’s apparent doppler frequency will generally be its true
doppler frequency minus some multiple of the PRF. Con-
sequently, the apparent frequencies of these targets will
usually change when the PRF is switched. On the other
hand, the observed doppler frequencies of ground moving
targets, whose speeds are much lower, will generally be true
frequencies and so will not change (Fig. 33). By disregard-
ing those threshold crossings which occur in the same
doppler filter after the PRF has been switched, GMTs may
be prevented from appearing on the display.
In air-to-ground applications where GMTs rather than
airborne moving targets are of interest, the same procedure
is commonly used in reverse: airborne moving targets are
prevented from appearing on the display by discarding
those threshold crossings which do not occur in the same
doppler filter after the PRF has been switched.
32. When searching for aircraft over areas where hundreds of vehicles may be moving on the ground, means must be provided to eliminate
these targets from the radar display.
33. Ground moving targets may usually be distinguished from air-
borne targets because their apparent doppler frequencies do
not change if the PRF is changed slightly.
Click for high-quality image
Click for high-quality image
Summary
At low PRF, mainlobe clutter may largely be eliminated
by offsetting the doppler spectrum so the central line is at
dc and passing the return through a clutter canceller and
bank of doppler filters. To keep the clutter in the canceller’s
rejection notches, the “offset” must be varied with radar
speed and antenna look angle.
Sidelobe clutter as well as mainlobe clutter residue and
background noise are then minimized through a combina-
tion of range gating and doppler filtering. Maximum detec-
tion range is usually limited only by receiver noise.
The principal limitation of low PRFs is doppler blind
zones—regions in the doppler spectrum for which a target’s
“observed” doppler frequency is the same as that of the
mainlobe clutter. The zones are the same width as the
mainlobe clutter lines and are spaced at intervals equal to
the PRF. While not a serious problem where large antennas
and low radar speeds are practical, in fighter radars blind
zones can be acceptably reduced only by employing such a
high PRF that R
u
, hence the maximum operating range, is
severely reduced or by limiting the maximum look angle.
The possibility of a target remaining in a blind zone for
an entire time-on-target may be minimized by switching
among widely separated PRFs. Alternatively, a limited span
of doppler frequencies may be kept clear by jittering or
sweeping the PRF. Or, the doppler frequency of a given tar-
get may be kept clear by adaptively selecting the PRF.
Multiple-time-around target echoes may be singled out
by jittering the PRF and be blocked from reaching the dis-
play. Both PRF switching and PRF jittering, however,
reduce detection sensitivity.
By transmitting very long pulses and employing pulse
compression to provide adequate range resolution, duty
factors of up to 20 percent may be achieved.
In fighter applications, severe doppler ambiguities make
discrimination between airborne and ground moving tar-
gets difficult. The problem can be alleviated at the cost of
wider blind zones by discarding the outputs of a larger
number of filters at the ends of the doppler filter bank or by
noting whether a target appears in the same doppler filter
after the PRF has been changed slightly.
Because of the blind zone problem, low PRFs are gener-
ally used only where mainlobe clutter can be avoided or
where large antennas and low radar speeds are practical.
CHAPTER 26 Low PRF Operation
353
LOW PRFs
ADVANTAGES LIMITATIONS
1. Good for air-to-air look- 1. Poor for air-to-air look-
up and ground down—much target
mapping. return may be rejected
along with mainlobe
clutter.
2. Good for precise range 2. Ground moving targets
measurement and fine can be a problem.
range resolution.
3. Simple pulse delay 3. Doppler ambiguities
ranging possible. generally too severe
to be resolved.
4. Normal sidelobe return 4. Higher peak powers or
can be rejected larger amounts of
through range pulse compression
resolution. generally required.
355
Medium PRF
Operation
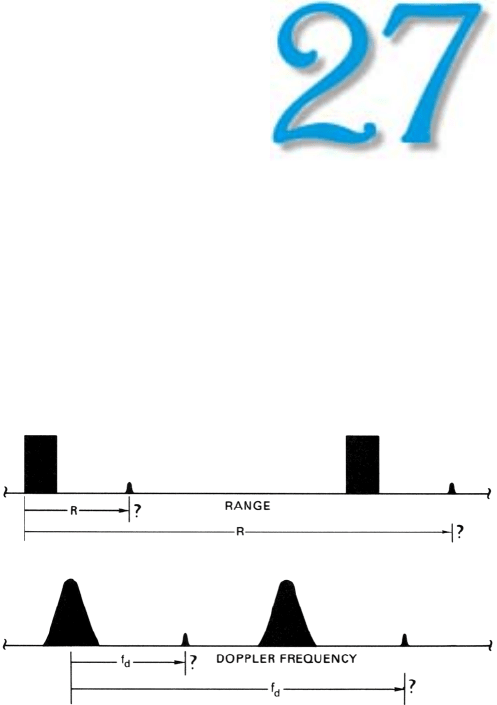
1. A medium PRF is one for which both range and doppler fre-
quency are ambiguous.
A
medium PRF is, by definition, one for which
both range and doppler frequency are ambigu-
ous (Fig.1). In practice, only the lower reaches
of the relatively wide band of PRFs satisfying
this definition are actually used. In general, the optimum
value increases with the radar’s radio frequency. For the X-
band, medium PRFs typically range from about 8 to 16
kilohertz—slightly higher than the top of the low PRF
range, which falls somewhere between 2 and 4 kilohertz.
Medium PRF operation was conceived as a means of get-
ting around some of the limitations of low and high PRFs in
fighter applications. The primary reason for operating
above the low PRF region is to improve the radar’s ability to
contend with mainlobe clutter and GMTs. And the primary
reason for operating below the high-PRF region is to
improve the radar’s ability to contend with sidelobe clutter
in tail hemisphere (low-closing-rate) approaches.
In this chapter, we will take a closer look at medium PRF
operation. We will see what must be done to separate tar-
gets from clutter and how the signal processing is per-
formed. We will then take up the problems of rejecting
ground moving targets, eliminating blind zones, minimiz-
ing sidelobe clutter, and rejecting sidelobe return from
those targets on the ground which have exceptionally large
radar cross sections.
Differentiating Between Targets and Clutter
As in the preceding chapter, to get a clear picture of the
problem of rejecting ground clutter, let us look at the range
and doppler profiles for a representative flight situation. We
will assume that the radar has a PRF of 10 kilohertz and
that the maximum range of interest is 24 nautical miles.
PART VI Air-to-Air Operation
356
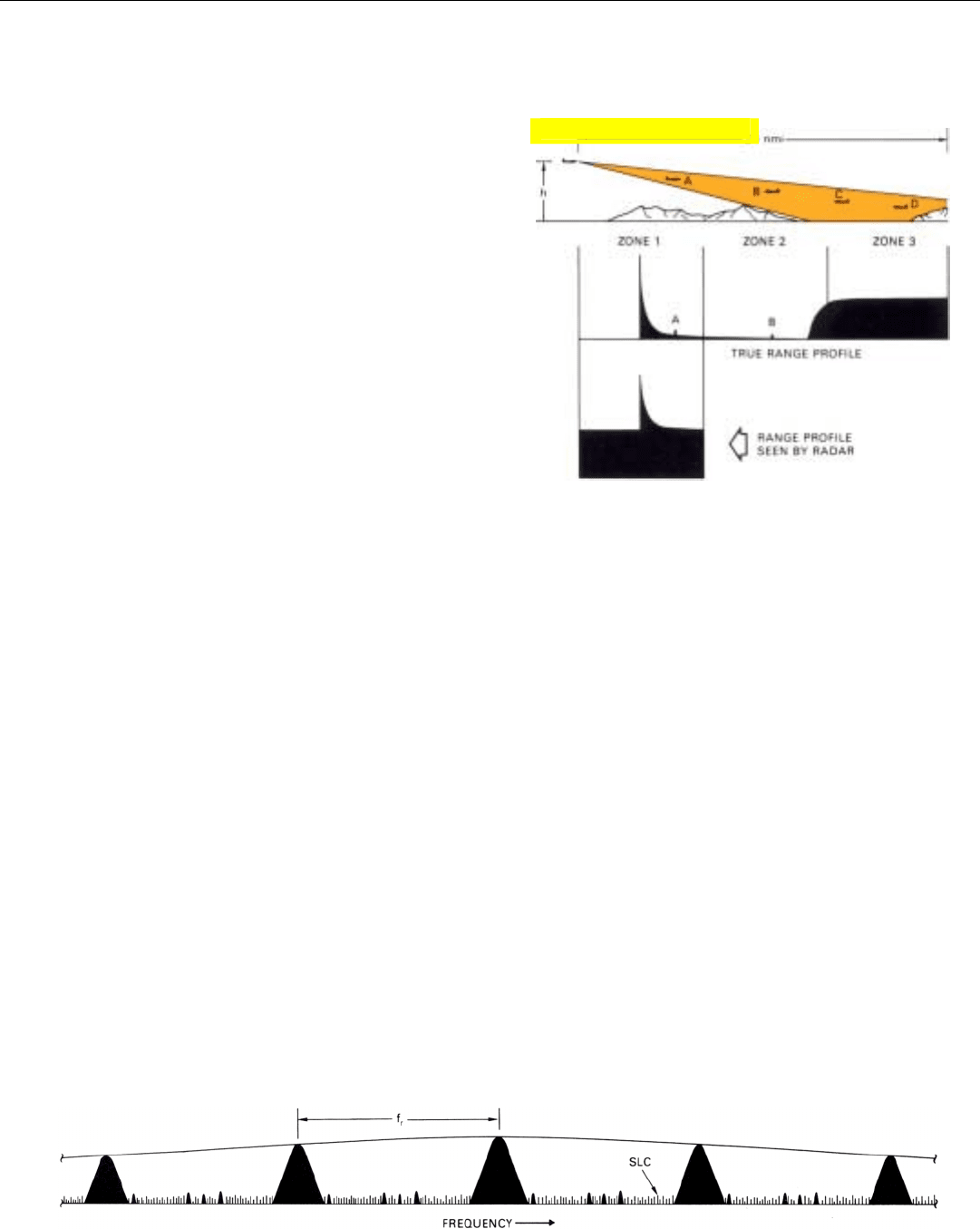
Range Profile. This profile with the true range profile
above it, and the flight situation from which the profiles
were derived above that, is illustrated in Fig. 2.
2. Range profile of a representative flight situation. PRF is such
that the maximum range of interest is broken into three range
zones.
3. Doppler profile of the representative flight situation. Mainlobe clutter lines are much more widely spaced than for low PRF operation; other
conditions remaining the same.
The width of the range zones is about 8 miles (80 ÷ 10 =
8). The maximum range of interest, therefore, is in effect
broken into three segments, 8 miles long.
As seen by the radar, however, these are indistinguish-
ably superimposed. Ground clutter completely blankets the
observed range interval. Mainlobe clutter extends from one
end of it to the other. Strong sidelobe clutter received from
short ranges covers a substantial portion of it. None of the
targets are discernible.
Except in the case of very large targets in comparatively
light clutter—such as are encountered in modes of opera-
tion provided for detecting and tracking ships—no amount
of range discrimination alone is going to enable the radar to
isolate the target echoes from the clutter. To reject both
mainlobe and sidelobe clutter, we must rely heavily on
doppler frequency discrimination.
Doppler Profile. As in the case of low PRFs, this profile
consists of a series of mainlobe clutter lines separated by
the pulse repetition frequency, f
r
(Fig. 3). Between any two
Click for high-quality image
consecutive lines (Fig. 4) appears most, but not all, of the
sidelobe clutter and the return from most but not necessarily
all of the targets. The rest of the sidelobe clutter and target
return is indistinguishably intermixed with the mainlobe
clutter.
Rejecting Mainlobe Clutter. While the doppler profiles
for low and medium PRF operation are similar, there is one
important difference: other conditions remaining the same,
at medium PRFs the mainlobe clutter lines are spread far-
ther apart. Since the width of the line is independent of the
PRF, there is considerably more “clear” room between them
in which to detect targets. Even if the mainlobe clutter is
reasonably broad, it can be rejected on the basis of its
doppler frequency without at the same time, on an average,
rejecting the return from an inordinately large fraction of
the radar’s targets.
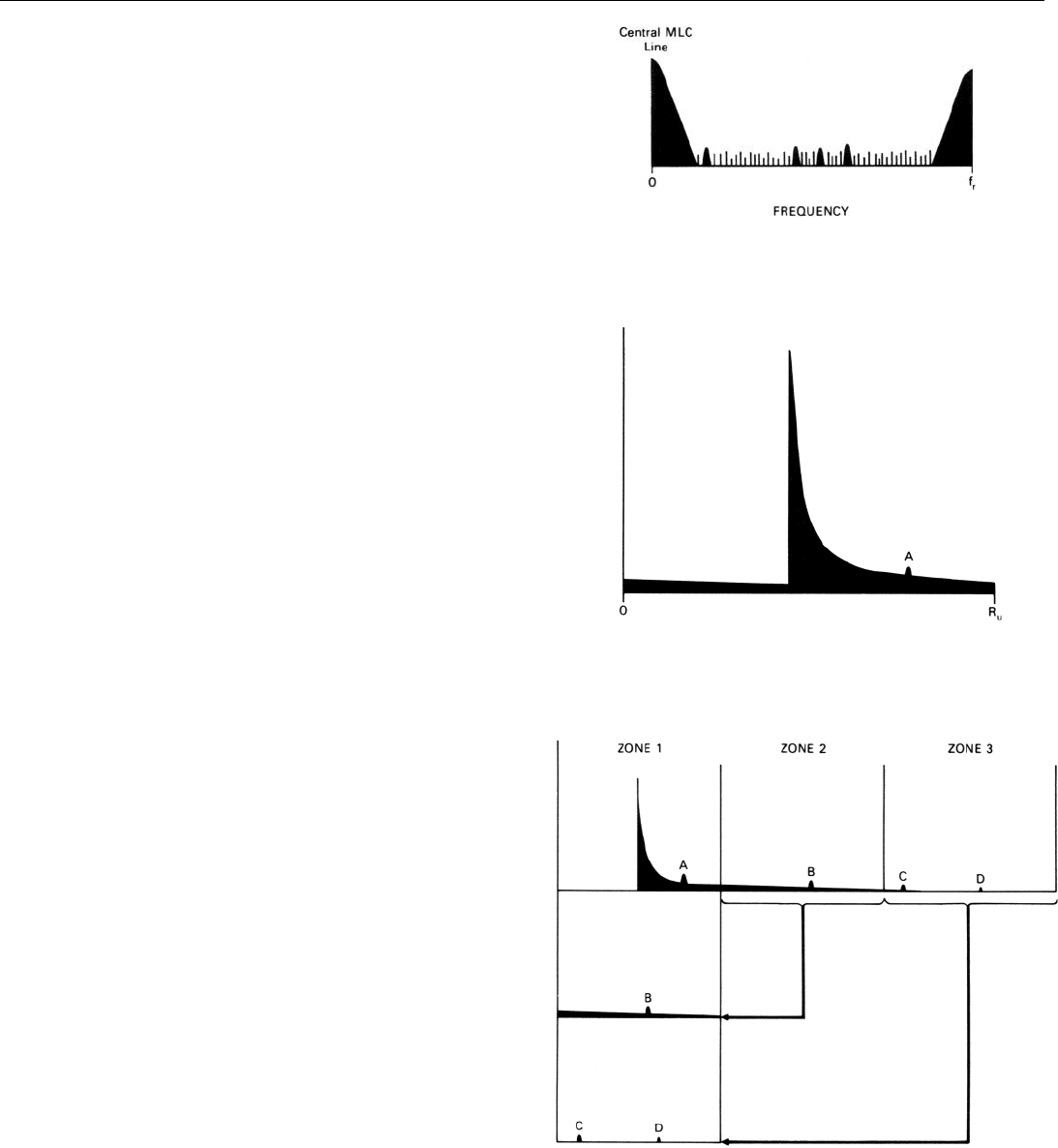
Rejecting Sidelobe Clutter. Because of the more severe
range ambiguities, this is not as simple as at low PRFs. To
illustrate, in Fig. 5 the range profile as seen by the radar is
repeated with the mainlobe clutter removed. You will notice
two things in this plot. First, the sidelobe clutter has a saw-
tooth shape. Second, only the short-range target (A) can be
discerned above the clutter. Targets B and C are still
obscured.
The sawtooth shape is due to the strong sidelobe return
from the first range zone being superimposed over the
weaker return from subsequent range zones (Fig. 6).
As for the obscured targets, Target B, in the second range
zone, must compete not only with sidelobe clutter from its
own range but with the far stronger clutter from the corre-
sponding range in the first range zone. Targets C and D, in
the third range zone, must compete not only with sidelobe
clutter from their own range but with the much stronger
return from the corresponding ranges in the first and sec-
ond zones.
The clutter can, of course, be reduced substantially. It
comes not only from different ranges but from different
angles. Since returns from different angles have different
doppler frequencies, we can differentiate between the target
echoes and a great deal of the competing sidelobe clutter if
we sort the return by both range and doppler frequency.
Sorting by range may, of course, be done by range gating
(sampling), just as in low PRF operation. The range gates
will isolate the returns received from relatively narrow
strips of ground at constant range. Because of range ambi-
guities, though, the return passed by each gate will come
from not just one strip, but several. And, as already noted,
one or more of these strips may lie at relatively short range.
CHAPTER 27 Medium PRF Operation
357
5. Range profile as seen by the signal processor, with mainlobe
clutter removed. Only the short-range target can be discerned
above the clutter.
6. Sawtooth shape is due to strong sidelobe return from the first
range zone being superimposed over the weaker return from
the second and third zones.
4. Portion of the doppler profile processed by the radar. The
doppler spectrum is normally shifted to place the central line
of mainlobe clutter at zero frequency (dc).
PART VI Air-to-Air Operation
358
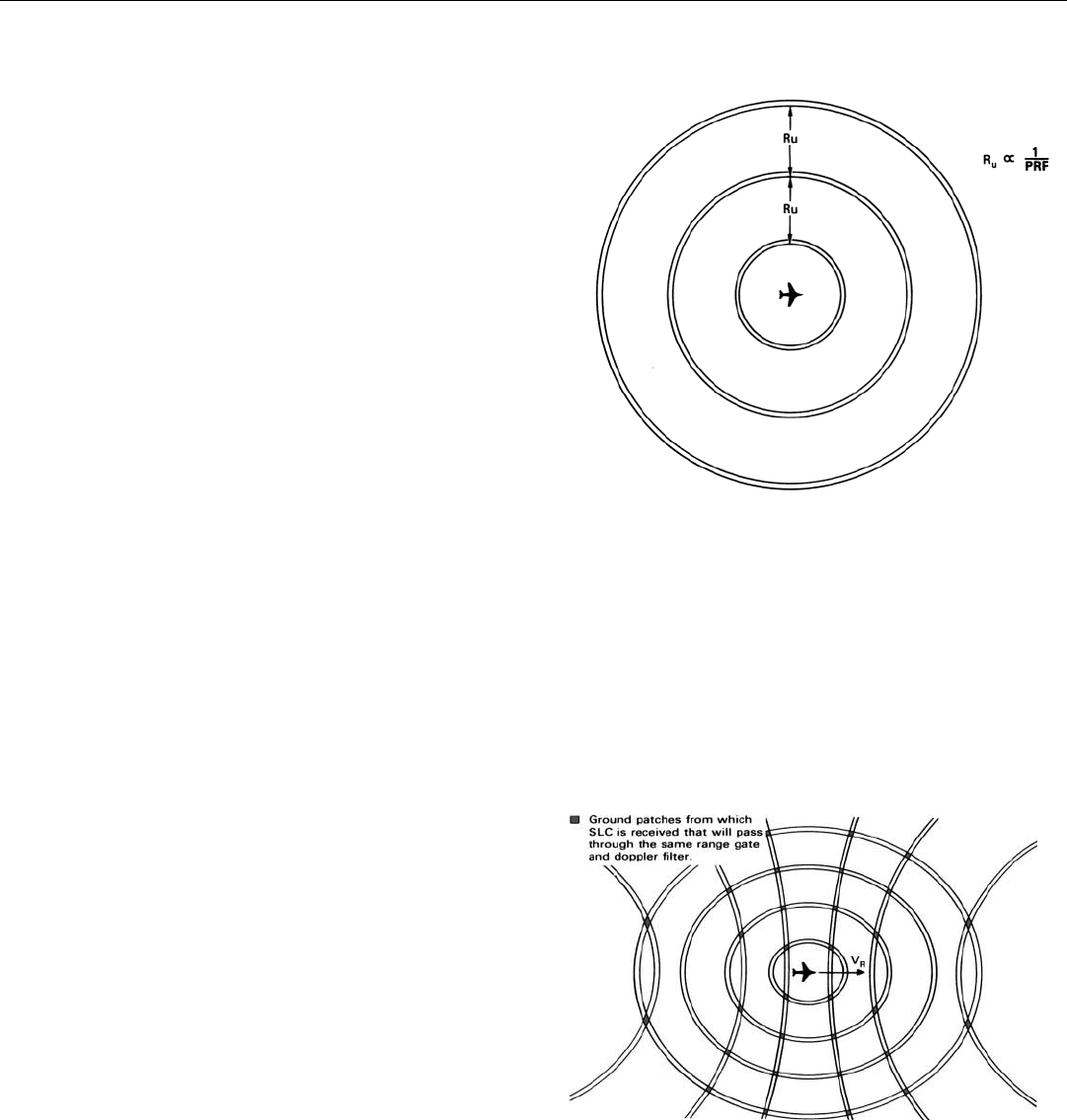
Still, the reduction in clutter obtained through range gating
will be substantial (Fig. 7).
7. Each range gate passes the return from a series of circular
strips (only three of which are shown here) separated from
one another by R
u
.
8. Each doppler filter receives only that portion of the total side-
lobe return passed by a single range gate. The filter passes
only that fraction of this return which comes from strips of
ground whose angles relative to the radar‘s velocity are such
that the return falls in the filter‘s passband.
Sorting by doppler frequency may be accomplished by
applying the output of each range gate to a bank of doppler
filters. They will isolate the returns received from strips of
ground lying between lines of constant angle relative to the
radar’s velocity (Fig. 8).
Because of doppler ambiguities, though, any one filter
will pass the return from not just one strip, but several.
Nevertheless, the amount of clutter with which a target’s
echoes must compete will be only a fraction of that passed
by the range gate.
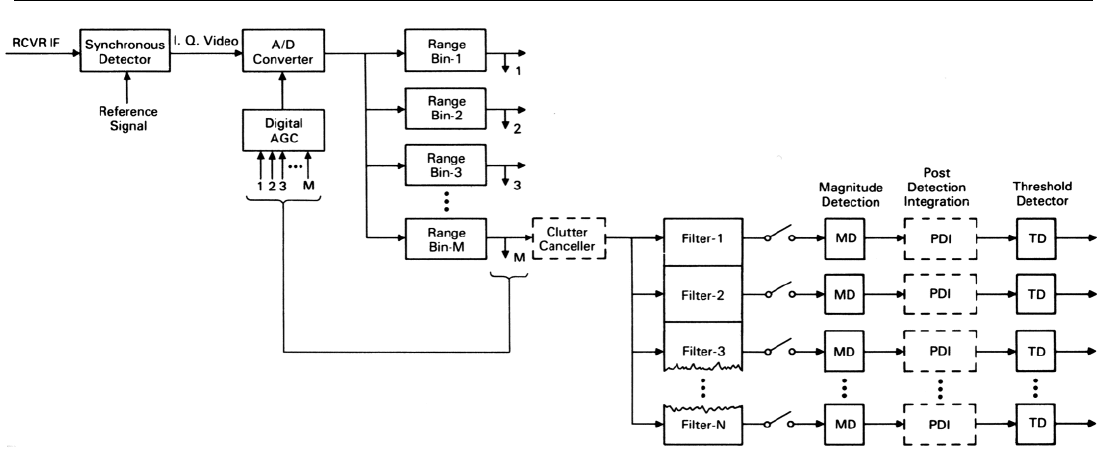
Signal Processing
As illustrated in Fig. 9 (above) for medium PRFs, signal
processing is quite similar to that for low PRFs. There are,
however, three main differences. First, because range ambi-
guities preclude the use of sensitivity time control, addition-
al automatic gain control is needed to avoid saturation of the
A/D converter. Second, to further attenuate the sidelobe clut-
ter (which because of range ambiguities piles up more
deeply at medium PRFs), the passbands of the doppler filters
may be made considerably narrower. Third, additional pro-
cessing is required to resolve range and doppler ambiguities.
As at low PRFs, the first step in processing the IF output
of the radar receiver is to shift the doppler spectrum so as
to place the central mainlobe clutter line at dc. Again, the
shift must be dynamically controlled to account for changes
in radar velocity and antenna look angle. The I and Q out-
puts of the synchronous detector that performs this shift are
likewise sampled at intervals on the order of the transmit-
ted pulse width
1
and digitized.
However, to reduce the dynamic range required of the
A/D converter, automatic gain control is provided ahead of
the converter. For this, the converter’s output is monitored
and a continuously updated profile of the output over the
course of the interpulse period is stored. On the basis of
this profile, a gain control signal is produced and applied to
the amplifiers ahead of the A/D converter.
By reducing the gain when the mainlobe clutter and
strong close-in sidelobe clutter are being received, the con-
trol signal keeps the converter from being saturated, yet
maintains the input to the converter well above the local
noise level when weaker return is coming through. Since
CHAPTER 27 Medium PRF Operation
359
9. How signal processing for medium PRF operation may be handled. Clutter canceller is optionally included to reduce dynamic range required
of doppler filters. Postdetection integration (PDI) may be provided if filter integration time is less than time-on-target.
1. Compressed pulse width,
when pulse compression is
used.
PART VI Air-to-Air Operation
360
the control signal is derived after the return is digitized, this
is called digital automatic gain control (DAGC).
To reduce the dynamic range required in the subsequent
processing, once the output of the A/D converter has been
sorted into range bins, an optional next step is to get rid of
the bulk of the mainlobe clutter in each bin. This may be
accomplished with a clutter canceller (Fig. 10).
The return in each bin is next applied to a bank of
doppler filters. At the end of every integration period, the
magnitude of each filter’s output is detected. If the scan of
the radar antenna and the bandwidth of the doppler filters
are such that the filter integration time is less than the time-
on-target, magnitude detection may be followed by postde-
tection integration.
In either event, the integrated return passed by each
doppler filter during every time-on-target is applied to a
separate threshold detector. The threshold of this detector
is adaptively set to keep the probability of clutter producing
false alarms acceptably low. The setting may be based on
the average level of the clutter for (a) several range incre-
ments on either side of that in question, (b) several doppler
frequencies on either side of that in question, (c) several
integration periods before and after that in question, or (d)
some combination of these. In general, the optimum aver-
aging scheme for a clutter background is different from that
for a noise background.
When a target is detected, we can tell its apparent range
by observing which bin (or adjacent bins) it was detected
in. Similarly, we can tell its apparent doppler frequency,
hence range rate, by observing which doppler filter (or
adjacent filters) the detection occurred in.
The observed range and doppler frequency will, of
course, be ambiguous. Range ambiguities are resolved by
PRF switching, as outlined in Chap. 12. Doppler ambigui-
ties may be resolved by the methods described in Chap. 21.
Rejecting Ground Moving Targets (GMTs)
GMTs are not nearly the problem they are at low PRFs.
For, at medium PRFs, the mainlobe clutter lines are spread
sufficiently far apart that GMTs appear only near the ends
of the region between lines. Targets with positive closing
rates appear at the lower end; targets with negative closing
rates, at the upper end (f
r
– f
d
). GMTs, therefore, can be
eliminated without losing an unreasonable fraction of the
target return simply by discarding any return in the fre-
quency bands where GMTs may appear.
The width of these bands depends upon the wavelength
and the velocities of the targets. Most surface vehicles travel
at less than 65 miles per hour. At X-band (30 hertz per mile
per hour of closing rate), the maximum doppler shift of the
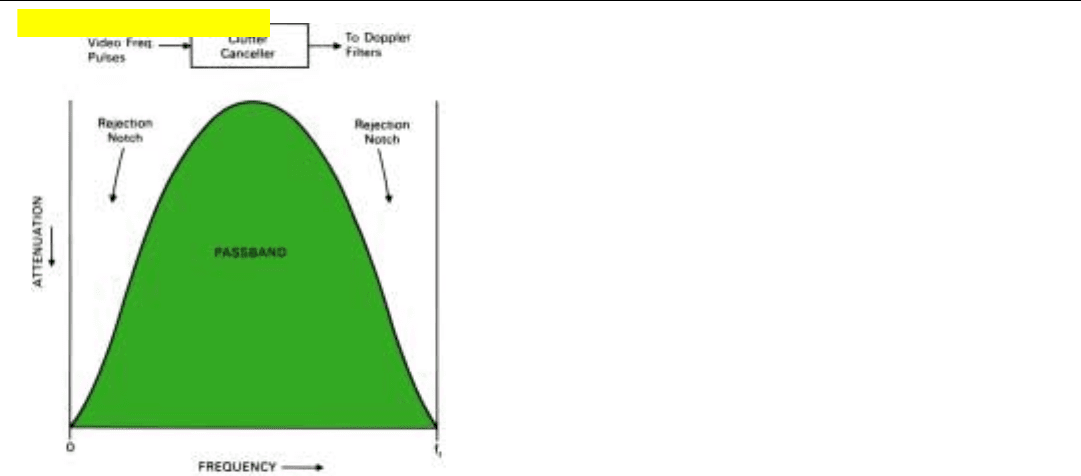
10. Mainlobe clutter is reduced by passing digitized video-
frequency output of receiver through simple clutter canceller
having characteristic such as this.
Click for high-quality image
GMTs relative to the center frequencies of the mainlobe clut-
ter lines would be about 2 kilohertz (65 x 30 = 1950 Hz).
So, for an X-band radar, those GMTs having a compo-
nent of velocity toward the radar (positive doppler shift)
can be eliminated by discarding all return whose frequency
is less than 2 kilohertz above the center of each mainlobe
clutter line (Fig. 11) And those GMTs having a component
of velocity away from the radar (negative doppler shift) can
be eliminated by discarding all return whose frequency is less
than 2 kilohertz below the center of each line. At the same
time, the mainlobe clutter residue will also be eliminated.
When this approach is taken to the problem of GMTs,
the anticipated maximum doppler frequency of the GMTs
relative to the doppler frequency of the mainlobe clutter
usually puts the lower limit on the selection of PRF.
Suppose that to provide a reasonable amount of room in
which to look for airborne targets, we establish a design cri-
terion that at least 50 percent of the doppler spectrum be
clear, i.e., not covered by blind zones. If to eliminate GMTs
we discard all return whose frequency is within 2 kilohertz
of the center of each clutter line (Fig. 12), we must make
the filter bank’s passband at least 4 kilohertz wide. To
accomplish this, the PRF must be at least 2 + 4 + 2 = 8 kHz.
Since the doppler shift is inversely proportional to wave-
length (f
d
= 2R
⋅
/λ), the shorter the wavelength, the higher
the minimum PRF will be, and vice versa. Take a wave-
length of 1 centimeter, for example. At this wavelength, the
maximum relative doppler shift for a 65 mile per hour
vehicle is 6 kilohertz as opposed to 2 kilohertz.
Consequently, if we apply the above design criterion to a 1-
centimeter radar, the minimum PRF is 6 + 12 + 6 = 24 kHz.
Eliminating Blind Zones
Blind zones, too, are still a problem at medium PRFs. In
fact, because of range ambiguities, the radar must contend
not only with blind zones in the doppler spectrum but with
blind zones in the range interval being searched, as well.
Doppler Blind Zones. Because mainlobe clutter covers a
much smaller portion of the doppler frequency spectrum,
doppler blind zones are far less severe at medium PRFs
than at low PRFs and so can be eliminated by switching
among fewer PRFs. However, additional PRFs are required
to resolve range ambiguities and eliminate ghosts.
Typically, the radar is cycled through a fixed number of
fairly widely spaced PRFs (Fig. 13). If a target is in the clear
on any three of these and its echoes exceed the detection
threshold on all three, the target will be deemed to have
been detected. The range ambiguities will then be resolved
and “de-ghosted.” The optimum number of PRFs varies
CHAPTER 27 Medium PRF Operation
361
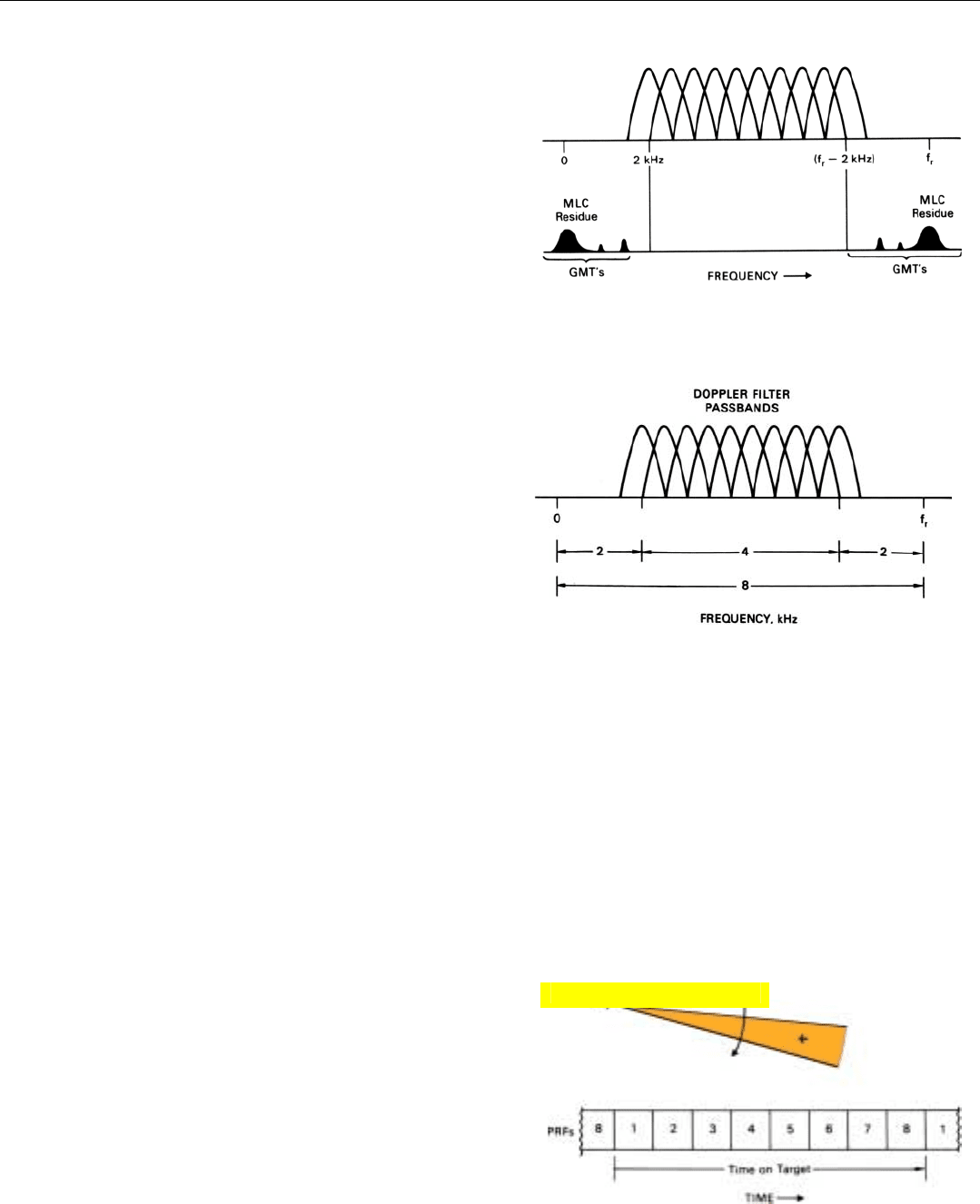
11. Most ground moving targets (GMTs), as well as residue of
mainlobe clutter (MLC) passed by clutter canceller, can be
rejected by discarding the return between 0 and 2 kilohertz
and between (f
r
– 2 kHz) and f
r
.
12. If 4 kilohertz of doppler spectrum is discarded to eliminate
GMTs, the PRF must be at least 8 kilohertz to meet criterion
that 50 percent of doppler spectrum be clear.
13. To eliminate blind zones and resolve range ambiguities, a
radar may cycle through a number of widely spaced PRFs.
Click for high-quality image