George W. Stimson introduction to Airborne Radar (Se)
Подождите немного. Документ загружается.


the filters covering the mainlobe clutter regions (filters at
the ends of the bank) then is simply not completed.
At the end of every filter integration time, the magnitude
of each desired filter’s output is detected. If the integration
time is less than the length of the time-on-target for the
radar antenna, some postdetection integration (PDI) may
subsequently be provided (see Chap. 10).
In either event, at intervals equal to the time-on-target,
the integrated output of each doppler filter is applied to a
threshold detector, which determines whether the sum rep-
resents a target.
Three aspects of this mechanization warrant elabora-
tion: how the clutter canceller works, how the detection
threshold is set, and how the central mainlobe clutter line
is maintained at dc.
Clutter Canceller. In simplest form, each channel of a
digital clutter canceller consists of a short-term memory
and a summer (Fig. 11). The memory holds each of the
numbers received from the analog-to-digital converter for
one interpulse period (1/f
r
). The summer then subtracts the
stored number from the currently received number and
outputs the difference. Thus, each number output by the
canceller corresponds to the change in amplitude of the
return from a particular range during the preceding inter-
pulse period.
Now, as explained in Chap. 18, the outputs which a syn-
chronous detector produces for successive returns from any
CHAPTER 26 Low PRF Operation
341
11. In simplest form, a clutter canceller consists of short-term memo-
ry and a summer. Memory holds signal for one interpulse peri-
od; summer subtracts delayed signal from undelayed signal.
WHAT A RANGE BIN IS
A range bin is a memory location in which are temporarily
stored successive pairs of numbers (x
n
, y
n
) representing the I
and Q samples of the radar return received at a given point in
the interpulse period. A separate “bin” therefore must be
provided for each sampling interval (range gate). To the extent
that range is unambiguous, the numbers stored in any one bin
represent successive returns from a single range increment,
hence the name “range” bin.
Because of the correspondence of the range bins to the
sampling intervals (when A/D conversion follows I and Q
detection), “range bin” has come to be used synonymously
with “sampling interval” as well as “range gate.”
Click for high-quality image
Click for high-quality image

PART VI Air-to-Air Operation
342
one range are in essence instantaneous samples of a signal
whose amplitude corresponds to the amplitude of the
returns and whose frequency is the doppler frequency of
the returns. Illustrated in Figs. 12 through 14 are successive
samples of three such signals. The frequencies of the signals
are 0, f
r
, and f
r
/2. All of the samples are taken at intervals
equal to the interpulse period (1/f
r
).
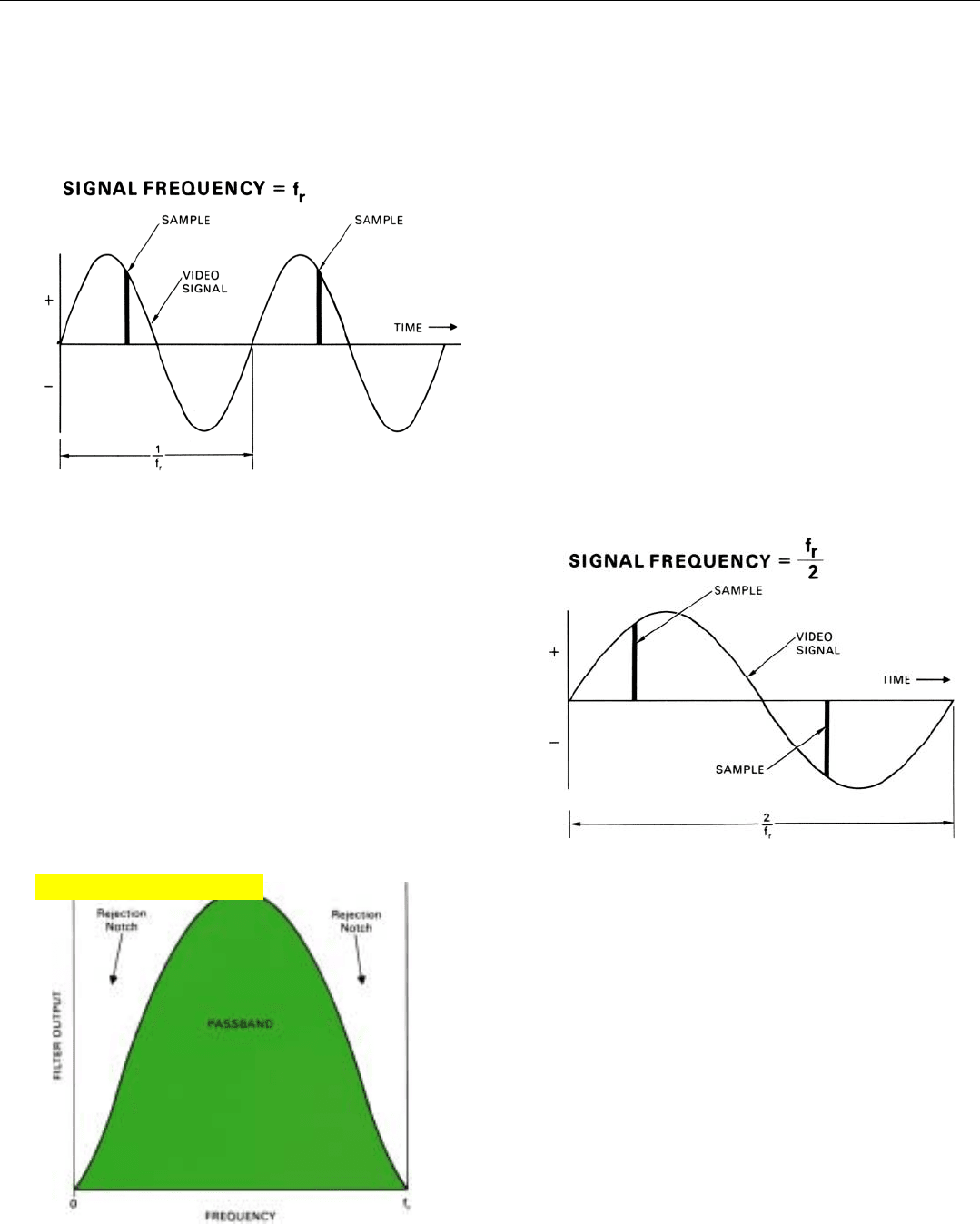
Naturally, successive samples of a video signal having
zero frequency—such as the central mainlobe clutter
line—have the same magnitude and the same algebraic
sign (Fig. 12).
Therefore, when one sample is subtracted from the other,
they cancel.
12. Periodic samples of video signal having frequency of zero (dc
signal). Samples have the same amplitude and algebraic sign.
THE CLASSIC DELAY–LINE CLUTTER CANCELLER
The original application of the clutter canceller was providing MTI
in ground based radars. Their mechanization, of course, was ana-
log.
Bipolar video from a phase sensitive detector in the receiver
was passed through a delay line (e.g. a quartz crystal) which
introduced a delay equal to the interpulse period. The delayed
signal was then subtracted from the undelayed signal. Since
ground return had no doppler shift, the video signal produced by
the return from the ground at any one range was essentially con-
stant from one interpulse period to the next. The video signal pro-
duced by a moving target, however, fluctuated at the target’s
doppler frequency. The clutter, therefore, cancelled whereas the
target signal did not.
Analog cancellers were used to provide MTI in airborne early
warning radars, as well as in early fighter radars. Digital can-
cellers, however, have the compelling advantages of avoiding
problems of delay instability and of being adjustment free.
Consequently, although most delay line cancellers are still ana-
log, the cancellers used in all modern airborne radars are digital.
Click for high-quality image
The same is true for a signal whose frequency is f
r
—such
as the first mainlobe clutter line above the central one.
Since the sampling interval is equal to the period of the
wave, the samples in this case are all taken at the same
point in every cycle (Fig. 13).
CHAPTER 26 Low PRF Operation
343
14. Samples of video signal having doppler frequency equal to
f
r
/2. While amplitudes are same, algebraic signs alternate.
15. Output produced by simple single-delay clutter canceller for
constant amplitude input.
13. Samples of video signal having frequency equal to PRF (f
r
).
Again, samples have the same amplitude and sign.
But for a frequency of f
r
/2, the result is just the oppo-
site. Because the sampling interval is only half the period
of the wave, the samples are alternately positive and nega-
tive (Fig. 14).
When one is subtracted from the other, the difference is
twice the magnitude of the individual samples.
For frequencies above and below f
r
/2, the differences
become progressively smaller.
As a result, a plot of the canceller’s output versus fre-
quency for a constant-amplitude input has an inverted “U”
shape (Fig. 15).
Click for high-quality image
PART VI Air-to-Air Operation
344
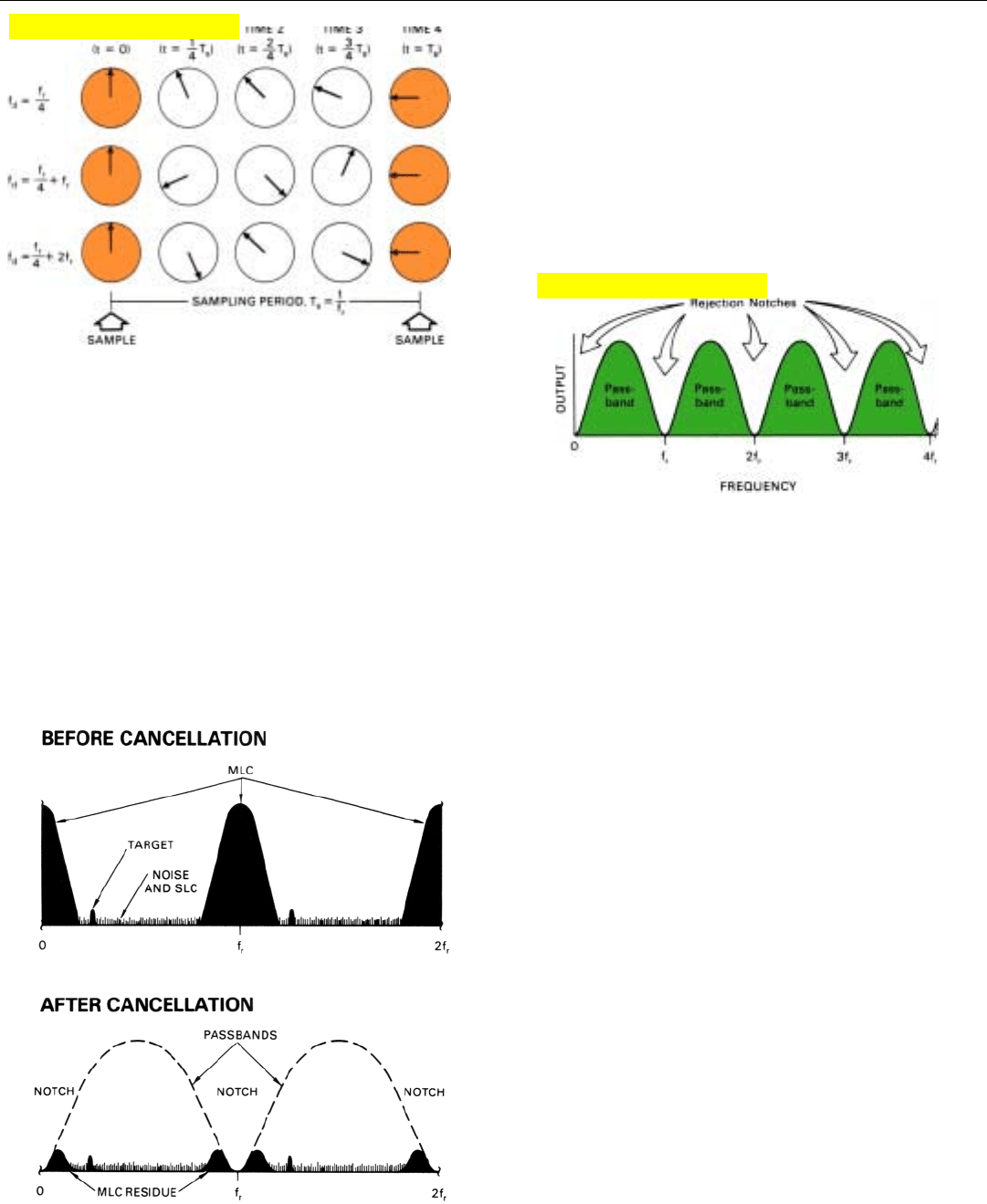
What about frequencies higher than f
r
? As illustrated
with simple phasor diagrams in Fig. 16, when a signal is
sampled at a given rate—in this case, f
r
—the samples will
be exactly the same if the signal’s frequency is f
d
+ f
r
as
they would be if their frequency were f
d
.
The same is true if the signal’s frequency is f
d
plus any
multiple of f
r
.
The canceller’s output characteristic, therefore, repeats
identically at intervals of f
r
from 0 (dc) on up (Fig. 17).
18. If clutter canceller
‘
s rejection notches are made wide enough,
mainlobe clutter will largely cancel. Output will consist of
mainlobe clutter residue, target echoes, sidelobe clutter, and
noise.
16. If target‘s doppler frequency equals some value, f
d
, plus a
whole multiple of the sampling rate, f
r
, the output from the
canceller will be the same as if the doppler frequency were f
d
.
17. Clutter canceller’s output characteristic repeats at intervals of
f
r
from dc on up.
The regions in which the output approaches zero—i.e.,
at dc and multiples of f
r
—are called rejection notches. If
any one of the mainlobe clutter lines is placed at dc (nor-
mally we place the central line there), every line will fall in
a rejection notch, and the clutter will tend to cancel—hence
the name, clutter canceller.
As you’ve probably already noticed, the notches of the
simple canceller just described are much narrower than the
clutter lines may sometimes be. But they can readily be
widened. The simplest way is to connect more than one
canceller together in series, i.e., cascade them.
If the rejection notches are made sufficiently wide and
the mainlobe clutter is centered in them, it will largely can-
cel (Fig. 18).
The output then will represent target echoes, sidelobe
clutter, and background noise—plus, of course, any main-
lobe clutter residue.
The doppler filters following each clutter canceller not
only eliminate most of the mainlobe clutter residue but
substantially reduce both the amplitude of the competing
sidelobe clutter and the mean level of the noise. By suitably
setting the target detection threshold, we can still further
reduce the possibility of clutter and noise producing false
alarms.
Detection Threshold. As explained in Chap. 10, for each
doppler filter, we set the threshold a predetermined amount
higher than the average of the outputs of the corresponding
Click for high-quality image
Click for high-quality image
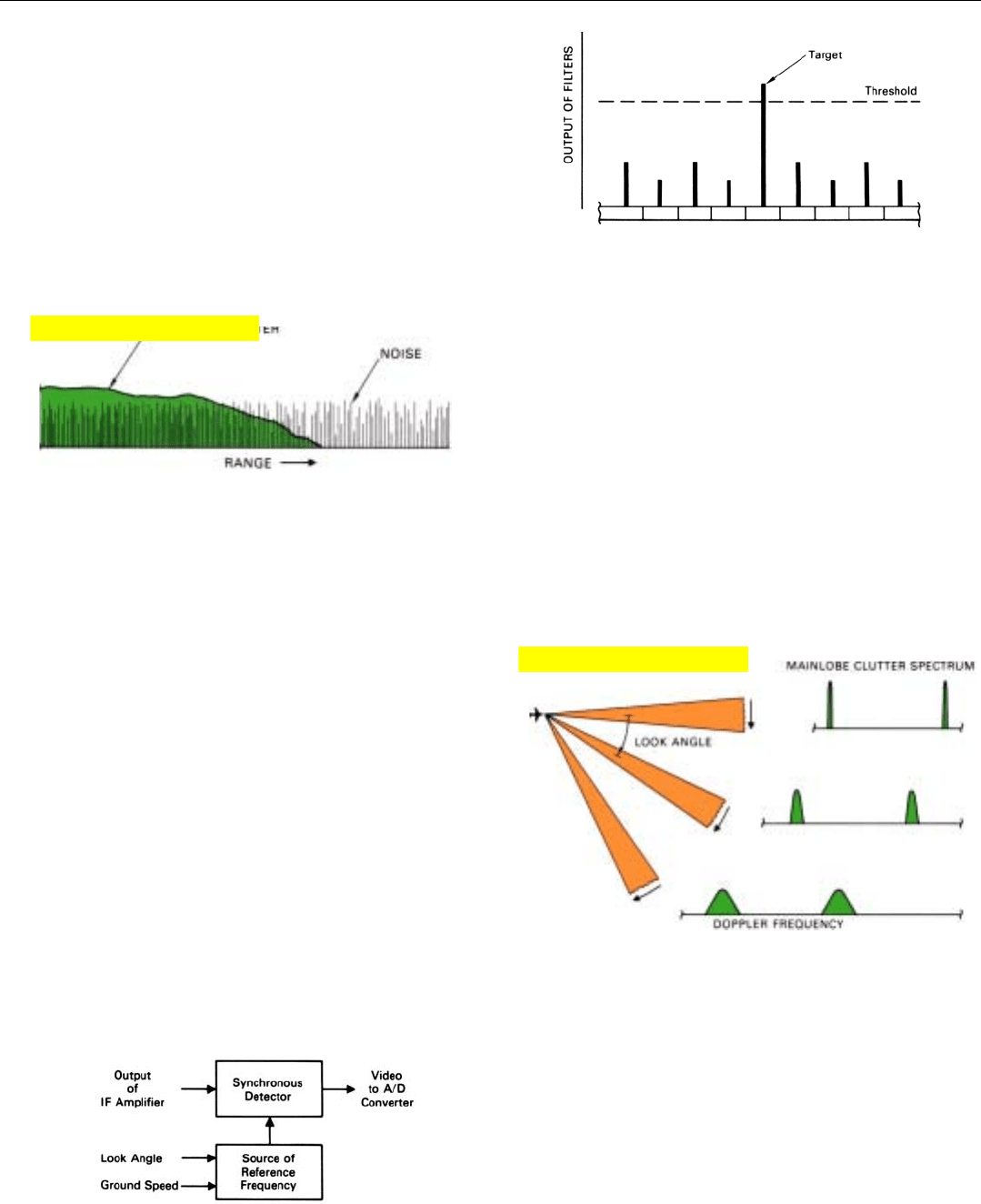
filters for several range bins on either side (Fig. 19).
Provided the threshold offset has been correctly chosen and
the averaging has been properly done, the probability of
clutter crossing the threshold may be reduced to an accept-
ably low value, while providing adequate sensitivity for the
detection of target echoes.
If you examine the range profile of the receiver output
with the mainlobe clutter removed, you will notice that, as
the range increases, a point is eventually reached where the
sidelobe clutter is submerged beneath the background
noise (Fig. 20).
CHAPTER 26 Low PRF Operation
345
21. As look angle increases, mainlobe clutter spectrum broadens
and shifts down in frequency.
22. By continuously adjusting the reference frequency supplied to
the synchronous detector to account for changes in look angle
and ground speed, mainlobe clutter can be kept in rejection
notches of clutter canceller.
19. By setting the target detection threshold for each filter output
far enough above the average of the outputs of the adjacent
filters, the probability of clutter crossing the threshold can be
reduced to an acceptable value.
20. Long range end of range profile seen at receiver output, with main-
lobe clutter removed. Sidelobe clutter ultimately becomes sub-
merged in receiver noise.
Beyond this range, the noise determines the detection
threshold. Thus, when low PRFs are being used, detection
range is usually limited, not by sidelobe clutter, but only by
background noise.
Tracking the Mainlobe Clutter. As we saw in Chap. 22,
the mainlobe clutter spectrum varies continually. As the
antenna look angle increases, the center frequency of the
spectrum decreases, and the width increases from nearly a
line to a broad hump (Fig. 21). As the speed of the radar
increases, both the frequency and the width increase.
Consequently, to keep the mainlobe clutter lines in the
clutter canceller’s rejection notches, the frequency offset
provided by the synchronous detector must track the
changes in clutter frequency. From a knowledge of antenna
look angle and ground speed, the frequency of the clutter
lines can readily be predicted. Changes in frequency can
then be tracked by appropriately adjusting the reference fre-
quency supplied to the synchronous detector (Fig. 22).
Click for high-quality image
Click for high-quality image
PART VI Air-to-Air Operation
346
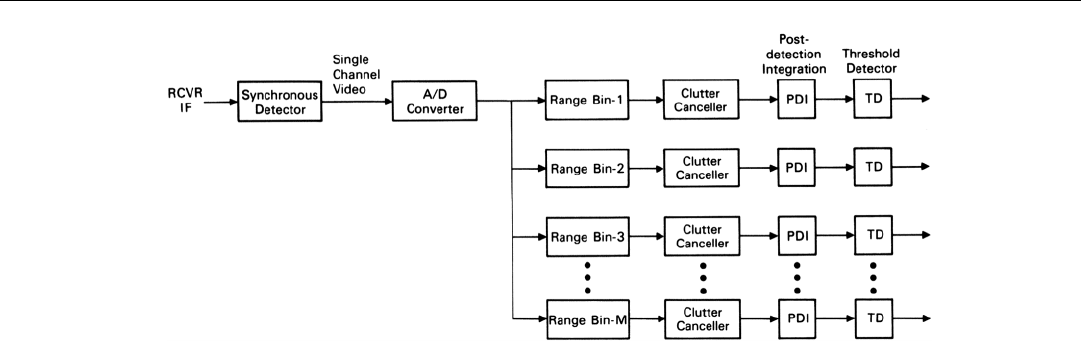
Less Sophisticated Signal Processing
In many low-PRF pulse-doppler radars (Fig. 23, above),
signal processing is much simpler than that just described.
The clutter canceller is directly followed by postdetection inte-
gration and target detection. With the consequent elimination
of doppler filtering, two channel processing is not essential.
So, at a sacrifice of 3 dB in signal energy, single-channel pro-
cessing can be employed. With it, the need for magnitude
detection is eliminated. Naturally, these simplifications result
in a considerable reduction in detection sensitivity.
Incidentally, in a single-channel processor, when the cen-
tral line is placed at dc, the portion of the doppler spectrum
lying below it folds over onto the positive-frequency portion.
Consequently, return whose doppler frequency is lower than
the central-line frequency appears in the bipolar video out-
put just as it would if its frequency were an equal amount
higher than the central-line frequency. There is no way of
telling whether a target’s range rate is positive or negative.
In still simpler non-doppler radars, the receiver output is
applied to a simple envelope detector. It converts the output
to a video signal, which is supplied directly to the display.
Advantages and Limitations
Low PRF operation has both compelling advantages and
limitations. Among the advantages are these:
• Target ranges can be measured directly by the simple,
highly precise pulse-delay method.
• Sidelobe clutter can largely be rejected through range
resolution.
• Sensitivity time control (STC) can be used to provide
wide dynamic range.
• Signal processing requirements can be met quite simply.
• Detection range is usually limited only by background
noise.
23. Block diagram of less sophisticated, single-channel signal processor in which doppler filtering is not employed.
Among the principal limitations associated with low
PRFs are the following:
• If a target’s doppler frequency is such that the target’s
echoes fall within one of the clutter filter’s rejection
notches, the radar will be “blind” to the target.
• Although first-time-around echoes are received from
all ranges out to the maximum range the radar is
designed to handle, there is little other than sensitivity
time control and obstructions in the line of sight to
prevent multiple-time-around echoes of strong targets
beyond R
u
from appearing falsely to be within the
radar’s range. (Mainlobe clutter from beyond R
u
is, of
course, rejected on the basis of doppler frequency, just
as is the mainlobe clutter from ranges out to R
u
.)
• In older radars and simpler modern radars employing
magnetron transmitters, duty factors are typically low.
So high peak powers are usually required to obtain
reasonable detection ranges.
• In fighters, limitations on antenna size require use of
wavelengths so short that doppler ambiguities are
severe. Not only is direct measurement of closing rates
impractical, but airborne targets are difficult to distin-
guish from moving targets on the ground.
Getting Around the Limitations
In the paragraphs that follow, we will examine the limita-
tions of low PRF operation and see what can be done to
alleviate them.
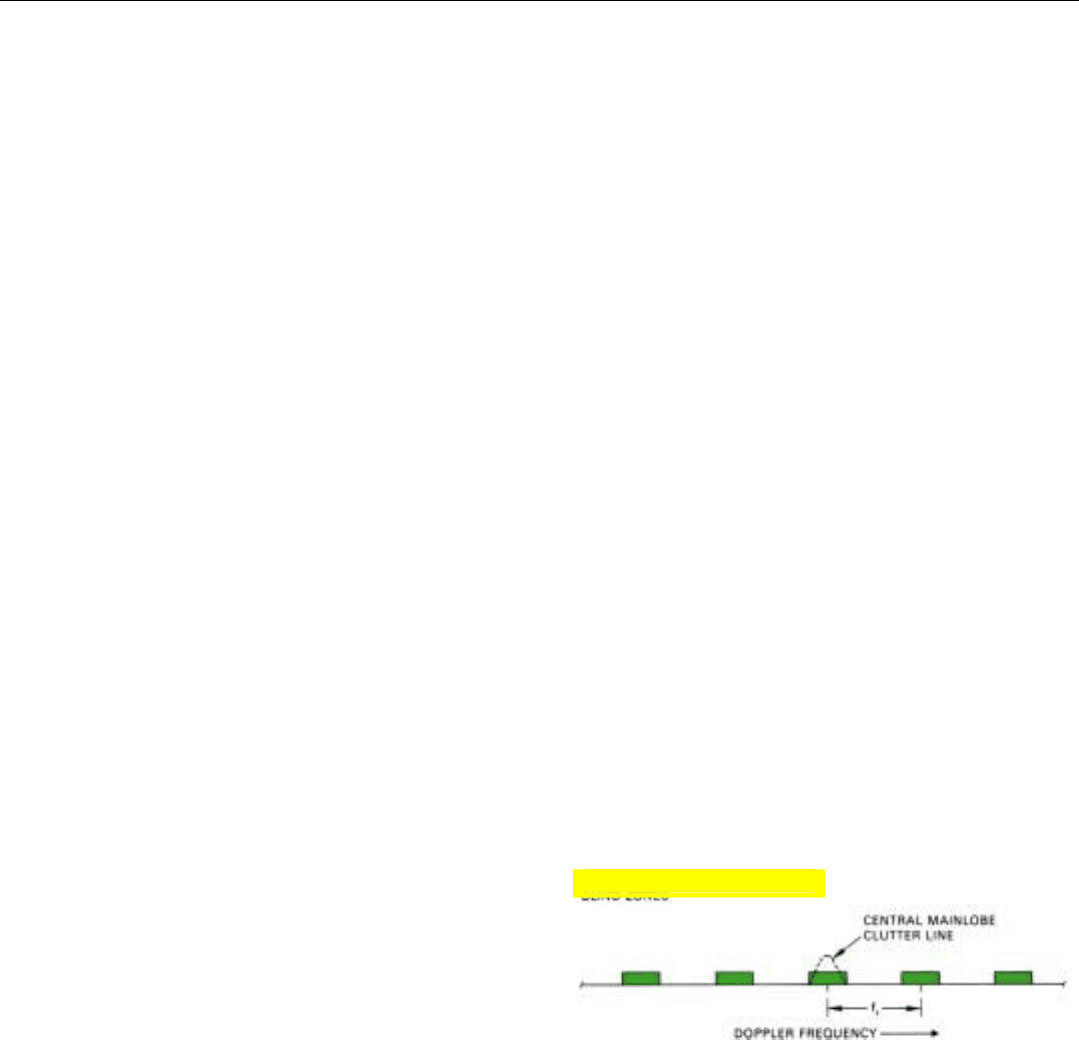
Doppler Blind Zones. Perhaps the most significant limi-
tation of low PRF operation is that due to the so-called
“doppler blind zones.” The bands of doppler frequency falling
within the clutter canceller’s rejection notches and the pass-
bands of the doppler filters whose outputs are not
processed are blocked out on either side of the central line
of mainlobe clutter (Fig. 24). If a target’s doppler frequency
lies within any of these “zones,” the echoes’ carrier and
sideband frequencies will fall in the rejection notches, and
the target will not be seen. Hence the name, blind zones.
At low PRFs a target’s doppler frequency may be many
times the PRF, so the target is about as likely to appear at
any one point within a span of frequencies equal to the PRF
as at any other. Therefore, the probability of a target being
in the blind zones at any one time is roughly equal to the
ratio of the width of the rejection notches to the PRF.
This probability can be reduced in several ways.
One is simply to increase the PRF, thereby spreading the
blind zones farther apart. The extent to which the PRF can
CHAPTER 26 Low PRF Operation
347
24. Bands of frequency falling within rejection notches of clutter
canceller/doppler filter bank. Radar is blind to any target
whose true doppler frequency lies within one of these bands.
Click for high-quality image
PART VI Air-to-Air Operation
348
be raised, however, is limited by the maximum range of
interest. Generally, that is at least on the order of 20 miles,
which puts an upper limit on PRF of about 4 kilohertz
(80 ÷20 = 4 kHz).
Another way of reducing the severity of the blind zones
is to reduce their width. The extent to which that can be
done is, of course, limited by the width of the mainlobe
clutter lines. They can be narrowed in one or more of the
following ways.
• Increasing the size of the antenna, hence reducing the
beamwidth or allowing use of longer wavelengths.
•
Limiting the speed of the radar-bearing aircraft, hence
reducing the spread of the mainlobe clutter frequencies.
• Limiting the maximum antenna look angle, hence fur-
ther reducing the spread of the mainlobe clutter fre-
quencies.
In radars for applications such as early warning and sur-
veillance, where the speed of the radar-bearing aircraft is
low, blind zones can be narrowed to the point that they are
not a serious problem by employing large antennas. As
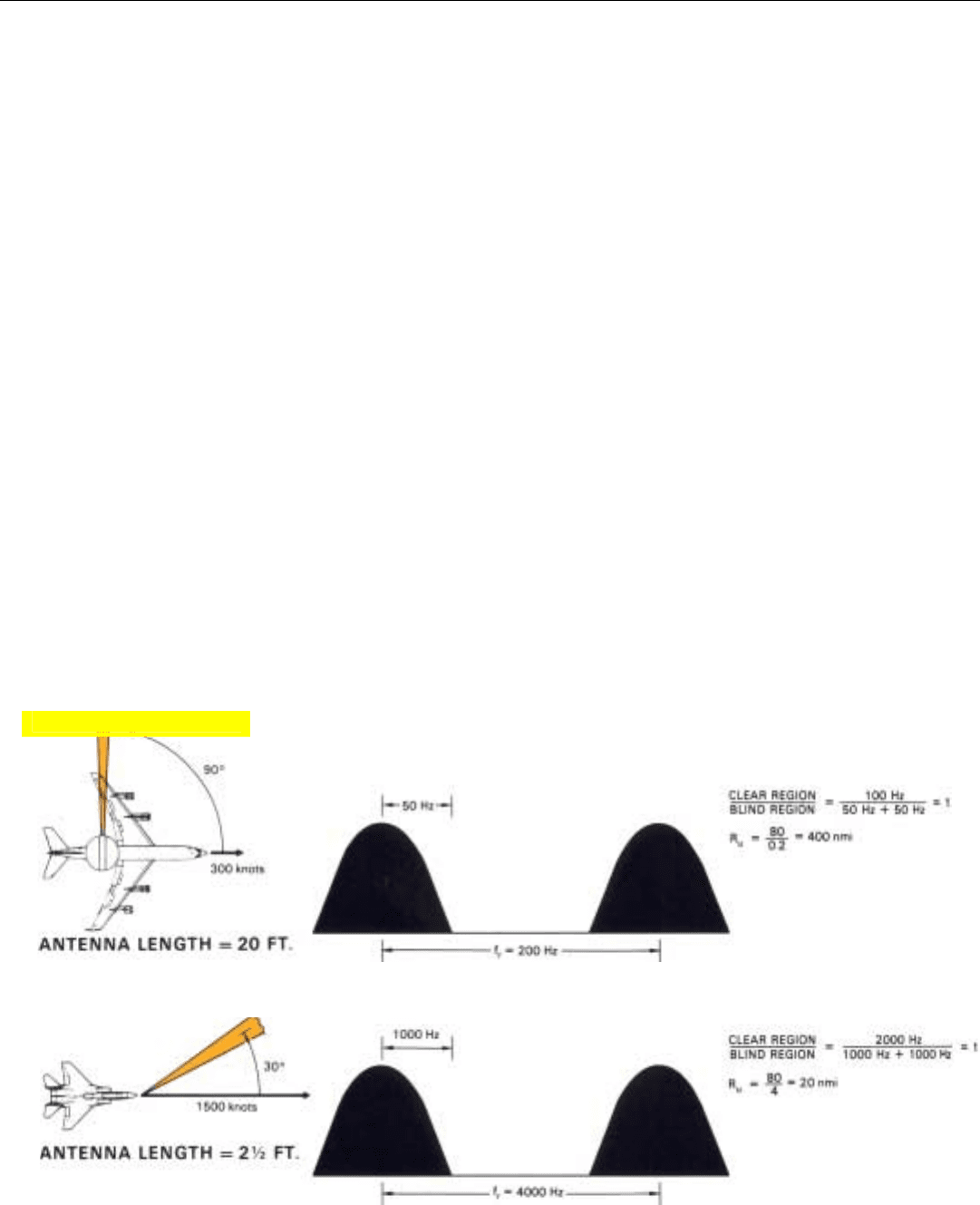
illustrated in the upper half of Fig. 25 (below), for a radar
having a 20-foot long antenna and a velocity of only 300
knots, even in the worst case (azimuth angle of 90˚), the
doppler-clear region will at least be as wide as the blind
region at a PRF as low as 200 hertz.
25. Where long antennas are practical and radar velocities are low, the ratio of doppler-clear to blind region is sufficiently large that blind
zones are not a serious problem. But in fighters, blind zones force the use of higher PRFs and/or limited look angles.
Click for high-quality image
However, in radars for fighter applications, where anten-
na size is limited and radar speeds can be high, blind zones
can occupy an excessive portion of the doppler spectrum.
About the only recourse one has (beyond increasing the
PRF) is to limit the maximum look angle.
As illustrated in the lower half of Fig. 25, the radar for a
fighter, whose antenna is generally on the order of 2
1
/2 feet
in diameter and whose maximum velocity may well be on
the order of 1500 knots or more, a one-to-one ratio of clear
to blind regions can be achieved only by limiting the
azimuth angle to a maximum of no more than 30˚ and rais-
ing the PRF to 4000 hertz. Usually neither such a severe
restriction of azimuth angle nor such a high PRF is attrac-
tive. Consequently, in those fighter applications where
mainlobe clutter is a problem, medium or high PRFs are
commonly used.
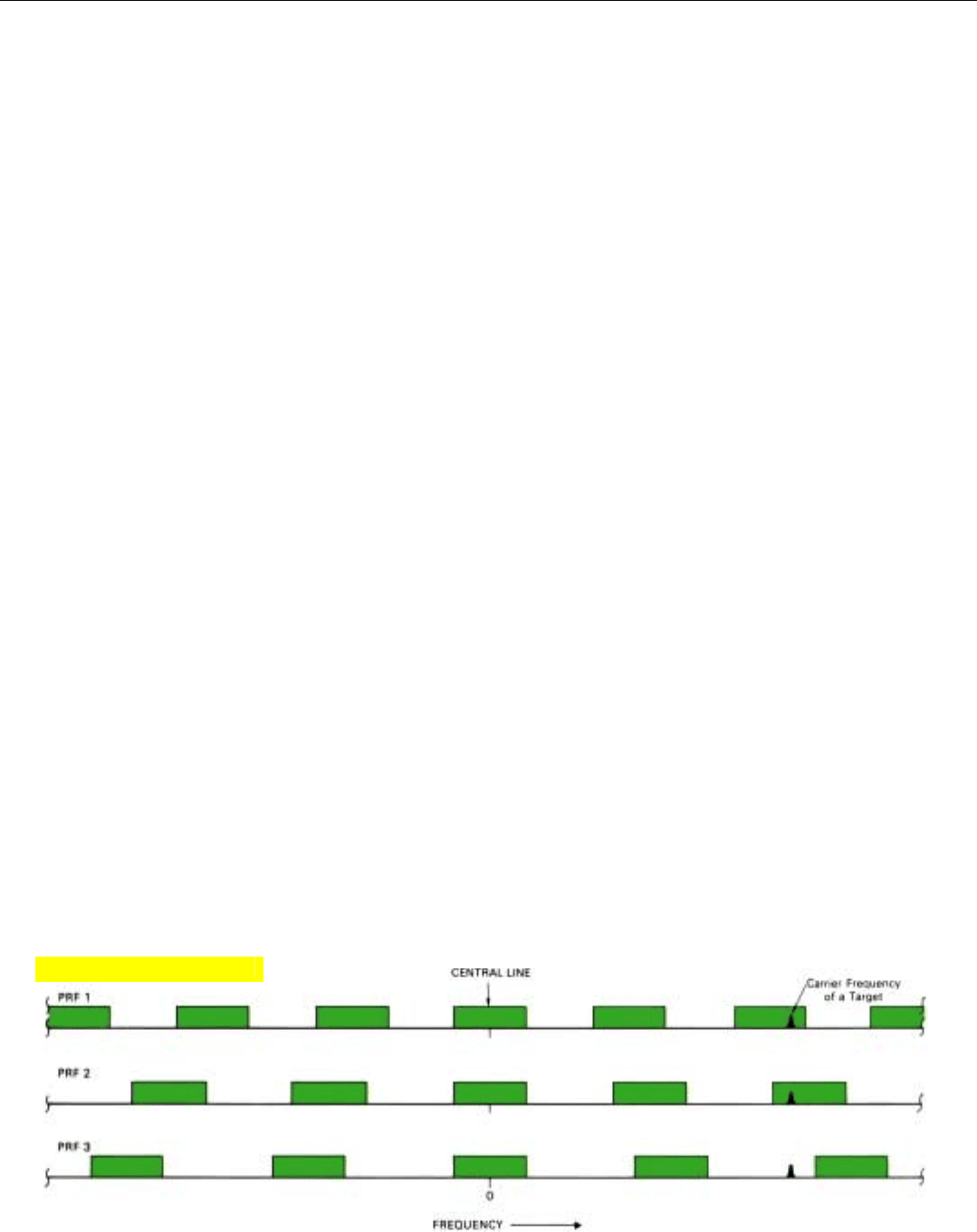
Regardless of the severity of the blind zones, we can sub-
stantially reduce the probability of a target remaining in a
blind zone throughout an entire time on target. Since the
blind zones are all separated from the zone at zero frequen-
cy by multiples of the PRF, we can move them about by
changing the PRF. The central line will of course remain at
dc, since it is the carrier frequency. In principle, if we use
enough different, widely separated PRFs we can periodical-
ly uncover every part of the spectrum (Fig. 26, below).
However, since the time-on-target is divided among the dif-
ferent PRFs, PRF switching reduces detection sensitivity.
The more PRFs that are used, the more the sensitivity will
be reduced.
A common alternative is to “jitter” or sweep the PRF
between two values. If these are suitably chosen, targets
whose closing rates fall within a limited span of interest—
e.g., rates corresponding to aircraft velocities around
Mach 1—can be kept continuously in the clear.
If a target’s doppler frequency is already known, the target
may be kept out of the blind zones by adaptively selecting
CHAPTER 26 Low PRF Operation
349
26. By periodically changing the PRF, blind zones can be shifted, reducing the possibility that any one target will remain in a blind zone for the
entire time-on-target.
Click for high-quality image
PART VI Air-to-Air Operation
350
28. A possible mode in low altitude applications employs low PRFs
on the upper bar of the search scan, where the beam does not
strike the ground, and medium PRFs on lower bar.
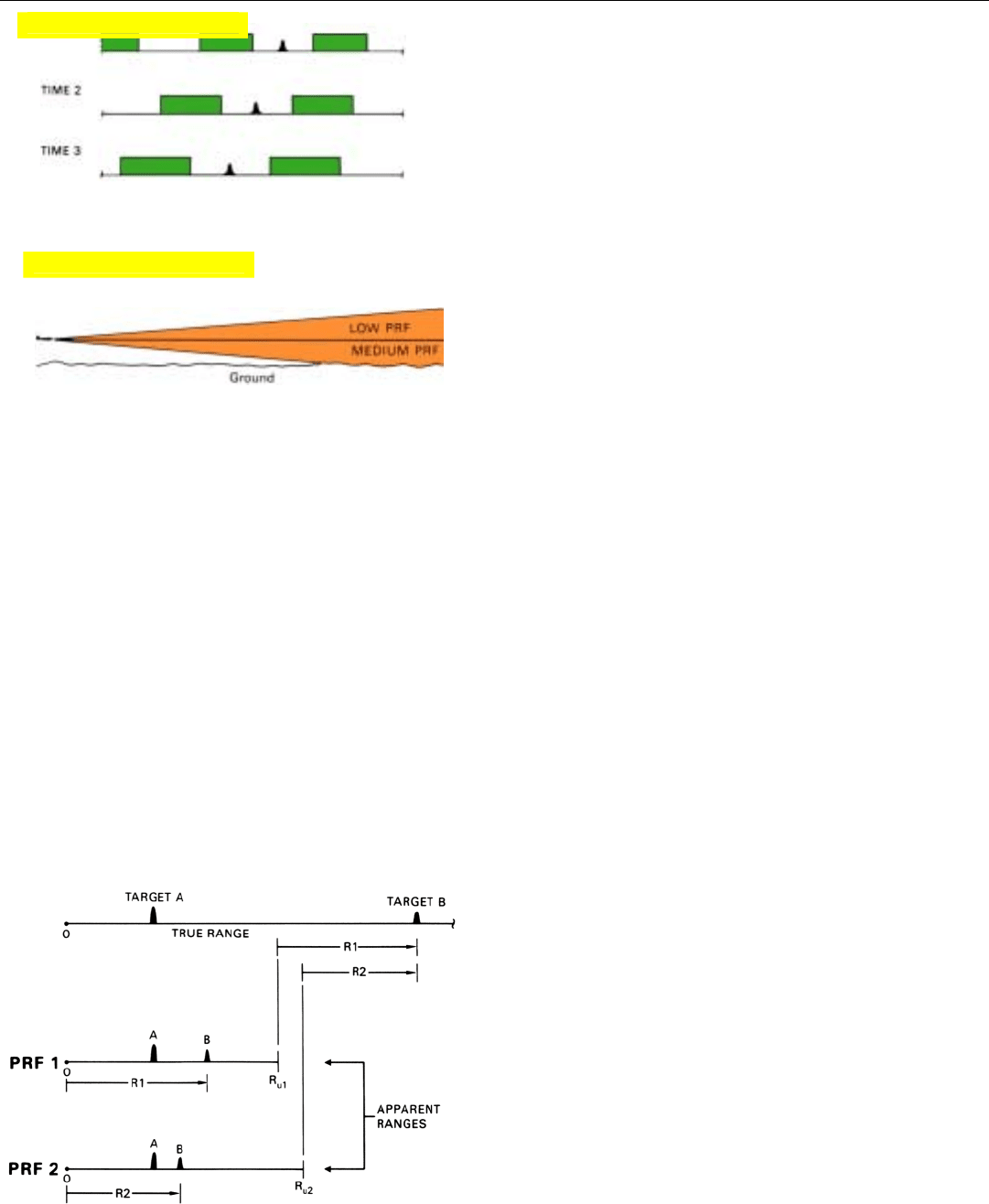
29. If the PRF is changed by a small amount, the observed range
of a target beyond the unambiguous range (R
u
) will change,
but the observed range of a target in the first range zone will
not.
the PRF. That is, the PRF may be selected so the zones will
straddle the target’s frequency (Fig. 27). The necessary a pri-
ori doppler information may be obtained by detecting the
target in a high PRF search mode. Or, it may be available as
a result of tracking the target in range.
If mainlobe clutter is not a problem—e.g., if the main-
lobe intercepts the ground only at shorter or longer ranges
than those of interest or if it does not intercept the ground
at all, blind zones can be avoided simply by not discarding
any return. That is, by eliminating the clutter cancellers and
processing the outputs of all the doppler filters.
In low altitude applications (Fig. 28), a possible mode is
one in which the radar employs low PRFs (for long range
detection) on the upper bar of the antenna search scan,
where mainlobe clutter is not encountered, and medium or
high PRFs on the lower bars (for good performance in
mainlobe clutter).
Multiple-Time-Around Echoes. The problems of multi-
ple-time-around target echoes may be moderated to some
extent by sensitivity time control (STC).
To illustrate, let us assume that the unambiguous range
is 20 miles. If return is received from a target at 21 miles, it
will appear to have a range of 1 mile. However, its echoes
will be only (1/21)
4
= 0.000005 times as strong (–53 dB) as
the echoes from a target of the same radar cross section
and aspect at a range of 1 mile. With STC, because detec-
tion sensitivity is greatly reduced during the initial portion
of the interpulse period, this unwanted target will likely
not be detected.
On the other hand, if the target were at a range of, say,
39 miles, this would not necessarily be so. The target
would then have an apparent range of 19 miles. Its echoes
would be (19/39)
4
= 0.0625 times as strong (–12.5 dB) as
those of an equivalent target at 19 miles, hence might be
detected.
If multiple-time-around targets are a problem, they may
be identified by changing the PRF (Fig. 29). As discussed in
detail in Chap. 12, if the PRF is changed by a small amount,
the observed ranges of these targets will correspondingly
change, whereas the observed ranges of the first-time-
around targets will not. Therefore, by periodically changing
the PRF and looking for changes in the observed target
ranges, the multiple-time-around targets can be spotted and
prevented from reaching the display.
Low Duty Factor. Within the capabilities of the trans-
mitter that is used, reasonably high duty factors can be
achieved at low PRFs by transmitting very long pulses and
employing large amounts of pulse compression to achieve
27. If a target‘s doppler frequency is known, it can be kept contin-
ually in the clear by adaptively changing the PRF.
Click for high-quality image
Click for high-quality image