George W. Stimson introduction to Airborne Radar (Se)
Подождите немного. Документ загружается.

CHAPTER 25 The Crucial Choice of PRF
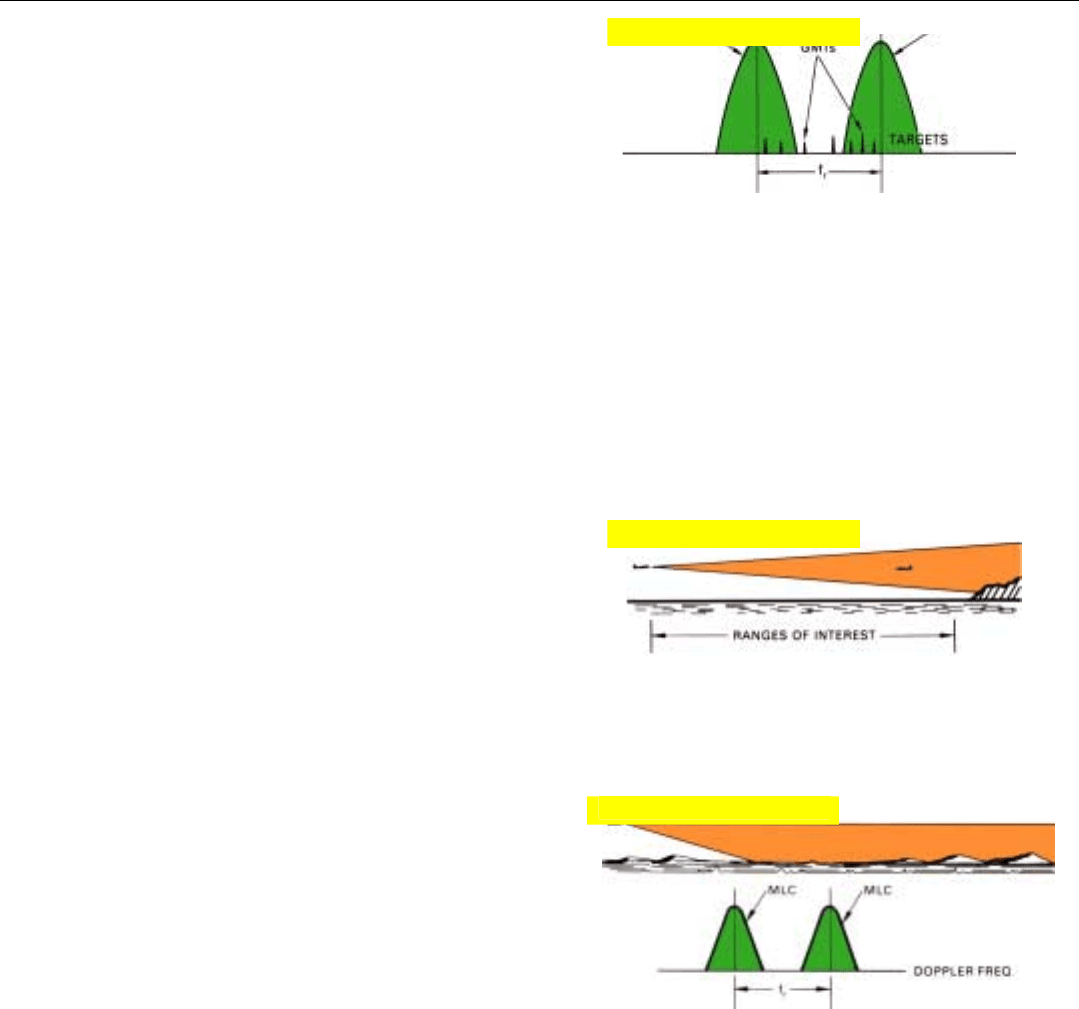
lapsed (telescoped) to the point that mainlobe clutter occu-
pies most of the doppler passband (Fig. 13). Consequently,
when the clutter is rejected the return from most of the tar-
get region will be rejected. Also, since target echoes of
widely different true doppler frequencies are indistinguish-
ably intermixed, not only is it impossible to resolve doppler
ambiguities, but the radar is susceptible to interference
from ground moving targets, GMTs.
Because of the severity of the mainlobe clutter problem,
the use of low PRFs for air-to-air operation in fighters,
which employ short wavelengths and comparatively small
antennas, is today restricted largely to situations where
mainlobe clutter can be avoided:
• When flying over water, which (because of its more
nearly mirrorlike surface) has a relatively low
backscattering coefficient at moderate to low grazing
angles
• When looking up in search of targets at higher alti-
tudes
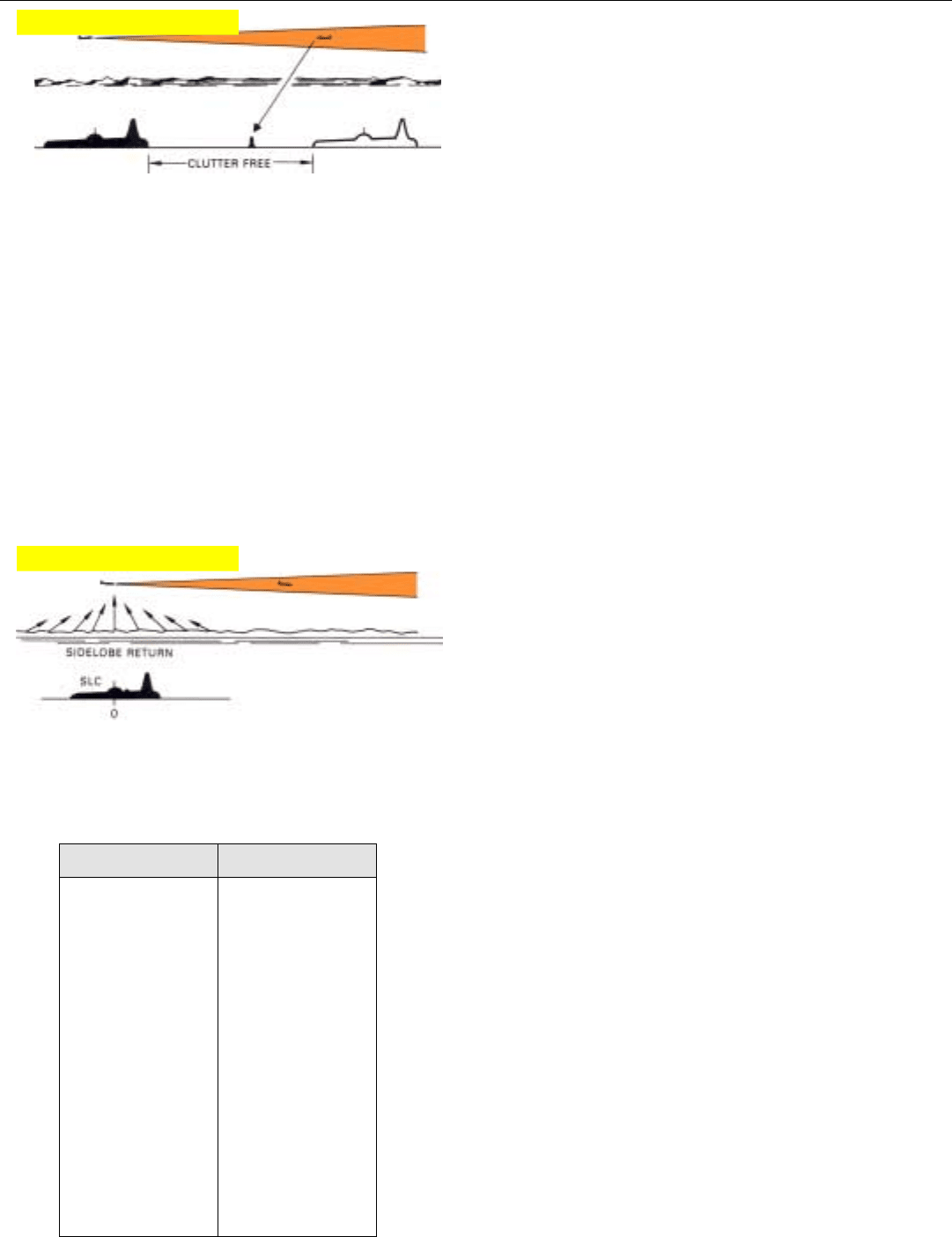
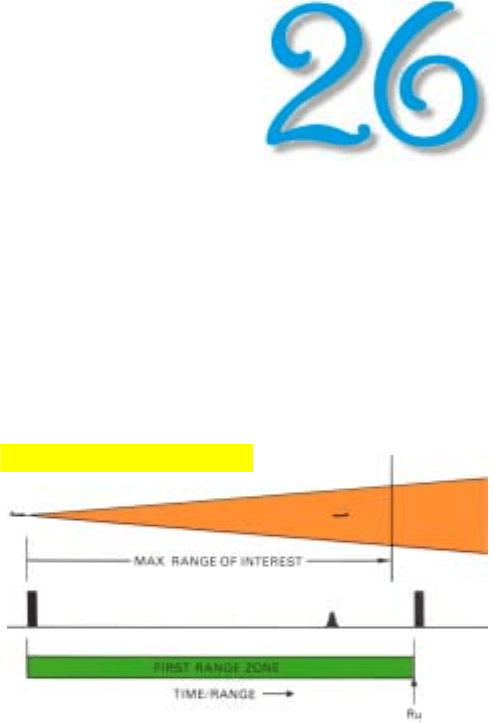
• When the mainlobe strikes the ground beyond the
maximum range of interest (Fig. 14), and clutter from
beyond the first range zone is rejected through other
means than doppler resolution.
For ground mapping, low PRFs are ideal. Because main-
lobe ground return is then the only return of interest, its
overwhelming strength is an asset, not a liability. Moreover,
the unambiguous observation of range which low PRFs
provide is essential.
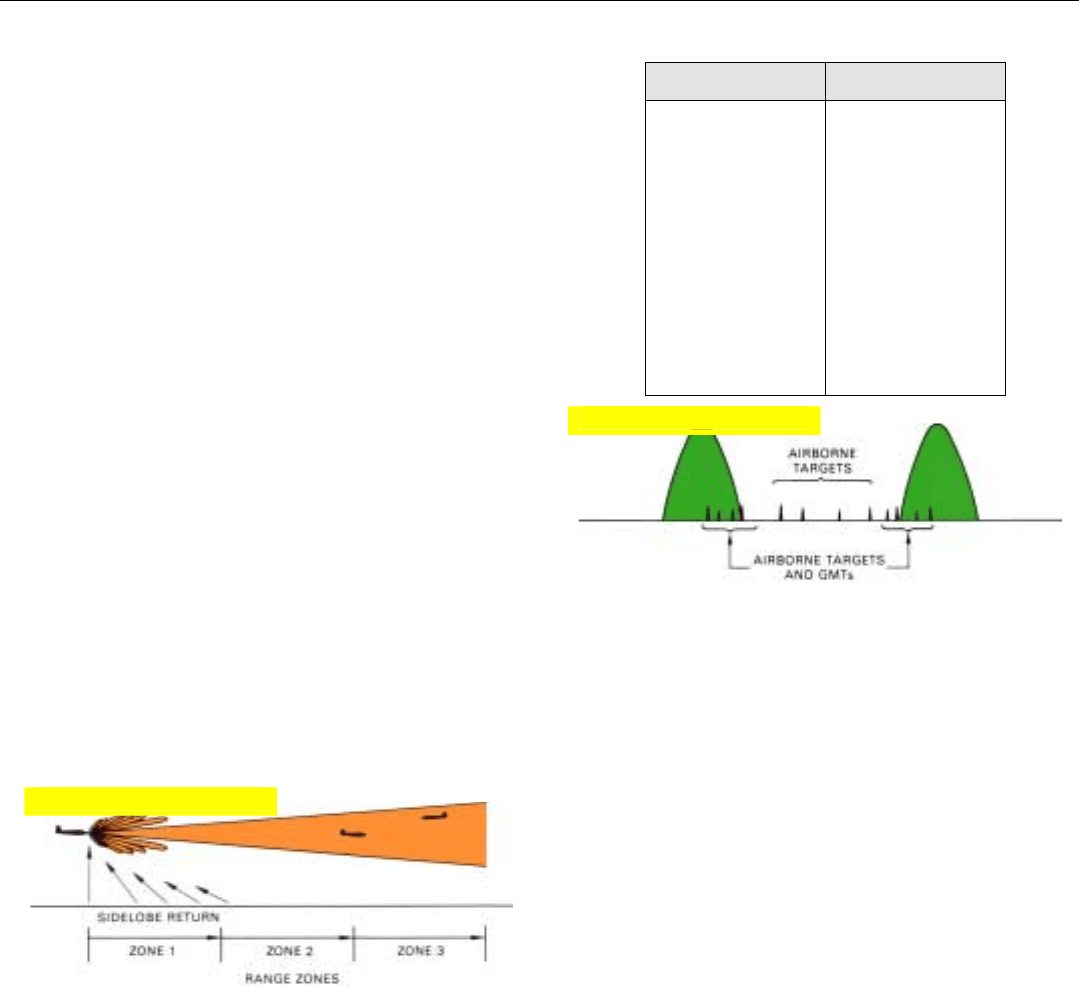
What about synthetic array ground mapping? For it (Fig.
15), the unambiguous observation of doppler frequencies,
too, is essential. Happily, the PRF can generally be made
high enough to prevent the repetitions of the mainlobe
clutter spectrum from overlapping, while providing an ade-
quately long maximum unambiguous range.
High PRF Operation. The problem of mainlobe clutter
can be solved by operating at high PRFs. The width of the
mainlobe clutter spectrum is generally only a small fraction
of the width of the band of true target doppler frequencies,
so that at high PRFs mainlobe clutter does not appreciably
encroach on the region of the spectrum in which targets are
expected to appear. Moreover, since all significant doppler
ambiguities are eliminated at high PRFs, mainlobe clutter
can be rejected on the basis of doppler frequency without at
the same time rejecting echoes from targets. Only if a target
is flying nearly at right angles to the line of sight from the
radar—a condition which occurs rarely and is usually
maintained for only a short time—will its echoes have the
same doppler frequency as the clutter and so be rejected.
331
14. Use of low PRFs for air-to-air operations in fighter-type aircraft
is limited to situations where mainlobe clutter is not a prob-
lem—e.g., over water or where mainlobe does not strike
ground within ranges of interest.
15. For ground mapping, unambiguous range provided by low
PRFs is essential. However, for SAR mapping, PRF must also
be high enough that repetitions of mainlobe clutter do not
overlap.
13. IF PRF is made low enough to provide reasonably long unam-
biguous ranges, most of target return will be rejected along
with mainlobe clutter, MLC. Also, ground moving targets,
GMTs, cannot be directly discerned from airborne targets.
Click for high-quality image
Click for high-quality image
Click for high-quality image
PART VI Air-to-Air Operation
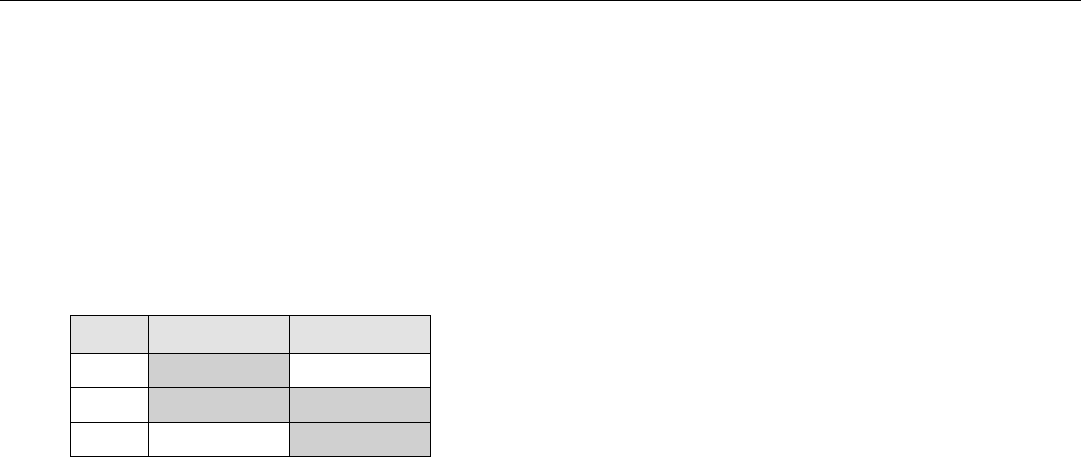
16. High PRFs provide clutter-free region in which to detect high
closing-rate targets.
17. But, return from low closing-rate targets must compete with
sidelobe return, much of it from short range.
332
Operation at high PRFs has other important advantages.
First, between the band of central-line sidelobe clutter fre-
quencies and the first repetition of this band, a region
opens up in which there is absolutely no clutter (Fig. 16).
It is here that the doppler frequencies of approaching tar-
gets lie—those for which long detection ranges normally
are desired. Second, closing rates can be measured directly
by sensing doppler frequencies. Third, for a given peak
power, average transmitted power can be maximized sim-
ply by increasing the PRF until a duty factor of 50 percent
is reached. High duty factors can also be obtained at low
PRFs, but this requires increasing the pulse width and
employing large amounts of pulse compression to provide
the degree of range resolution which is essential in low PRF
operation.
The principal limitation of high PRF operation is that
detection performance may be degraded by sidelobe clutter
when operating against low closing-rate tail-aspect targets.
At the high PRFs typically employed in fighter radars, the
return from virtually all ranges is collapsed (telescoped) into
a range interval little wider than that occupied by a target’s
echoes. Consequently, the sidelobe clutter can only be
rejected by resolving the return in doppler frequency.
Much of the sidelobe clutter falling within the same
resolvable frequency increment as a target’s echoes will have
been reflected from very much shorter ranges and so will be
quite strong (Fig. 17).
When flying at moderate to low altitudes over terrain that
has a high backscattering coefficient, unless the target has a
large radar cross section or is at short range, its echoes may
be lost in the clutter, and there will be no way of extracting
them from it.
Also, if little or no range discrimination is provided, zero
closing-rate targets will be rejected along with the altitude
return.
Another disadvantage of very high PRFs is that they make
pulse delay ranging more difficult. As the PRF is increased,
range ambiguities become more severe. To resolve them, the
radar must switch among more PRFs.
Ultimately, a point is reached where range must be mea-
sured by more complex, less accurate techniques, such as
frequency modulation ranging. In any event, because of
losses incurred in resolving ambiguities, range can be mea-
sured only at the expense of a reduction in maximum detec-
tion range.
Nevertheless, when mainlobe clutter is a problem and
long detection ranges are desired against approaching tar-
gets, the advantages of high PRFs far outweigh any of these
disadvantages.
HIGH PRFs
ADVANTAGES LIMITATIONS
1. Good nose-aspect 1. Detection range
capability—high-clos- against low-closing-
ing-rate targets appear rate targets may be
in clutter-free region of degraded by sidelobe
spectrum. clutter.
2. High average power 2. Precludes use of sim-
can be provided by in- ple, accurate pulse de-
creasing PRF. (Only lay ranging.
moderate amounts of
pulse compression, if
any, are needed to
maximize average
power.)
3. Mainlobe clutter can be 3. Zero-closing rate tar-
rejected without also gets may be rejected
rejecting taget echoes. with altitude return
and transmitter
spillover.
Click for high-quality image
Click for high-quality image
CHAPTER 25 The Crucial Choice of PRF
Medium PRF Operation. Medium PRFs were conceived
as a solution to the problems of detecting tail-aspect targets
in the presence of both mainlobe and strong sidelobe clut-
ter, thereby providing good all-aspect coverage. If the maxi-
mum required operating range is not exceptionally long,
the PRF can be set high enough to provide adequate separa-
tion between the periodic repetitions of the mainlobe clut-
ter spectrum without incurring particularly severe range
ambiguities.
Mainlobe clutter can then be isolated from the bulk of
the target return on the basis of its doppler frequency. And
individual targets can be isolated from the bulk of the side-
lobe clutter through a combination of range and doppler
resolution.
Also, ground moving targets—being close to the fre-
quency of the mainlobe clutter—can be rejected along with
it, without rejecting an unacceptable additional amount of
possible target return (Fig. 18).
Range ambiguities are more easily resolved than at high
PRFs so that pulse delay ranging is possible. While doppler
frequencies are ambiguous, these ambiguities are also mod-
erate enough to be resolved.
On the negative side, because of the range and doppler
ambiguities, both nose- and tail-aspect targets may have to
compete with close-in sidelobe clutter (Fig. 19). This prob-
lem, of course, can be avoided by switching among several
different PRFs.
333
18. With medium PRFs, repetitions of mainlobe clutter are widely
enough separated so that it and return from ground moving
targets can be rejected without rejecting undue amount of
target return.
19. While targets may still have to compete with close-in sidelobe
clutter, the clutter can be avoided by switching among several
different PRFs.
But the resulting reduction in the integration time for
each PRF limits the maximum detection range.
Nevertheless, where extremely long detection range is
not required—as when operating at moderate to low alti-
tudes, in lookdown situations, or in tail chases—adequate
detection range can generally be achieved.
Another consequence of the range and doppler ambigui-
ties encountered at medium PRFs is that sidelobe return
from ground targets of large radar cross section can be a
serious problem. Special measures must generally be taken
to eliminate this return lest it be confused with return from
airborne targets.
MEDIUM PRFs
ADVANTAGES LIMITATIONS
1. Good all-aspect capa- 1. Detection range
bility—copes satisfac- against both low and
torily with both main- high closing-rate tar-
lobe and sidelobe gets can be limited by
clutter. sidelobe clutter.
2. Ground-moving targets 2. Must resolve both
readily eliminated. range and doppler
ambiguities.
3. Pulse delay ranging 3. Special measures
possible. needed to reject side-
lobe return from
strong ground targets.
Click for high-quality image
Click for high-quality image
PART VI Air-to-Air Operation
334
Summary
Pulse repetition frequencies used by airborne radars
range from a few hundred hertz to several hundred kilo-
hertz at X-band. Generally, only at extremely low PRFs is
range unambiguous—and then only if all return from
beyond the first range zone is excluded or negligible.
Conversely, only at considerably higher PRFs are doppler
frequencies largely unambiguous. Thus, the choice of PRF
is generally a compromise.
Three categories of PRF have been established: low, high,
and medium. Which category a particular PRF falls in
depends on the operational situation.
A low PRF is one for which the maximum required oper-
ating range falls within the first range zone. Simple pulse
delay ranging can be used, and sidelobe clutter can be
almost entirely removed through range resolution. But, in
fighter radars, doppler ambiguities are generally so severe
that mainlobe clutter cannot be rejected without rejecting
much possible target return, and GMTs may be a problem.
A high PRF is one for which doppler frequencies of all
significant targets are unambiguous. Mainlobe clutter can
be rejected without rejecting target return, and a clutter-free
region is provided in which approaching targets appear.
Also, high average power can be obtained by increasing the
PRF. While this mode is excellent for nose-aspect targets,
because of range ambiguities sidelobe clutter may severely
limit performance against tail-aspect targets. Range rates
can be measured directly, but pulse delay ranging may be
difficult or impractical because of severe range ambiguities.
A medium PRF is one for which both range and doppler
frequency are ambiguous. But if the value of the PRF is
judiciously selected, the ambiguities are comparatively easy
to resolve. Consequently, good all-aspect performance can
be provided despite both mainlobe and sidelobe clutter, as
well as GMTs. Maximum detection range, however, is limit-
ed by close-in sidelobe clutter, and sidelobe return from
large-RCS objects on the ground may be a problem.
CATEGORIES OF PRF
PRF RANGE DOPPLER
HIGH Ambiguous Unambiguous
MED Ambiguous Ambiguous
LOW Unambiguous Ambiguous
335
Low PRF Operation
1. A low PRF is one for which the first range zone extends at least
to the maximum range the radar is designed to handle.
A
l
ow PRF is, by definition, one for which the first
range zone—the zone from which first-time-
around echoes are received—extends at least to
the maximum range the radar is designed to
handle (Fig. 1). In the absence of return from beyond this
zone, the observed ranges are unambiguous. (The first
range zone, you’ll recall, extends out to the so-called maxi-
mum unambiguous range, R
u
, which in nautical miles
roughly equals 80 divided by the PRF in kilohertz.)
Typically, low PRFs range from around 250 hertz (R
u
=
320 nmi) to 4000 hertz (R
u
= 20 nmi). Unfortunately, at
such PRFs unless the wavelength is relatively long and/or
the closing rate relatively low, the observed doppler fre-
quencies are highly ambiguous.
Low PRFs are essential for most air-to-ground uses. And
they are superior to both medium and high PRFs for cer-
tain air-to-air applications, e.g. early warning. But for use in
fighter aircraft, where target return generally must compete
with mainlobe clutter, low PRFs have serious limitations
.
In this chapter, we will take a closer look at low PRF
operation. We will see how target echoes may be separated
from ground clutter and how the signal processing may be
performed; then, take stock of advantages and limitations
and see how the limitations may be alleviated.
Differentiating Between Targets and Clutter
To see what must be done to separate target echoes from
ground clutter, let us look at the range and doppler profiles
that would be observed by a low PRF radar for a fighter
aircraft in a representative flight situation.
Click for high-quality image
PART VI Air-to-Air Operation
336
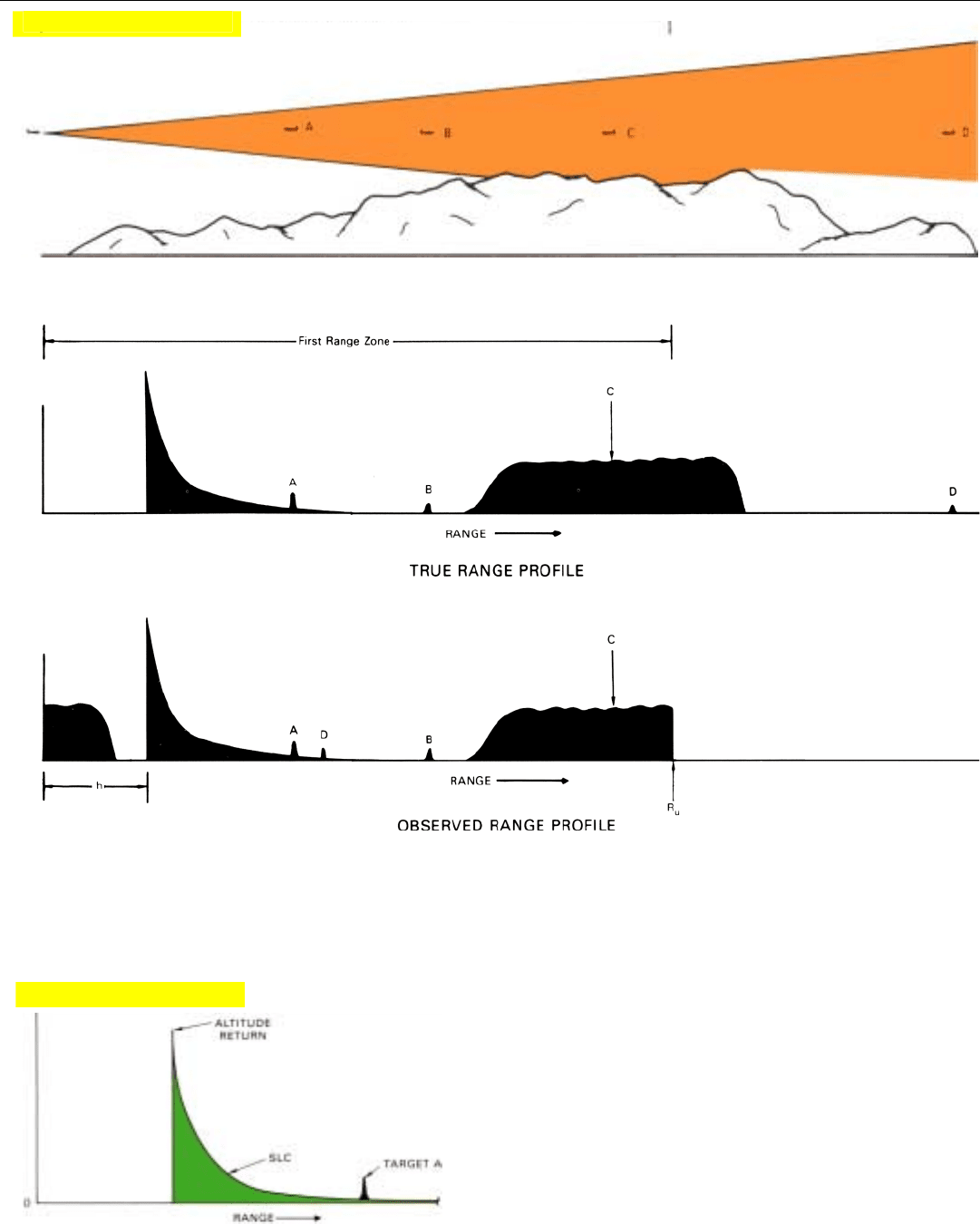
Range Profile. As illustrated in Fig. 2, within the first
range zone the observed ranges are true ranges. The alti-
tude return, sidelobe clutter, and mainlobe clutter are all
clearly identifiable—as is the return from targets A and B,
which are outside the mainlobe clutter. Target C, however,
is completely obscured by mainlobe clutter. Target D,
which is beyond the first range zone, appears falsely at a
much closer range, but we will defer considering it until
later.
From even a cursory inspection of the portion of the pro-
file in which sidelobe clutter alone appears (Fig. 3), one
thing is immediately clear: the echoes from a target will
generally be stronger than the sidelobe clutter received
from the target’s own range.
2. Range profile for low PRF radar in representative operational situation. Out to maximum range of interest, ranges observed by radar directly
correspond to true ranges.
3. A target‘s echoes are generally stronger than sidelobe clut-
ter from target’s own range.
Click for high-quality image
Click for high-quality image
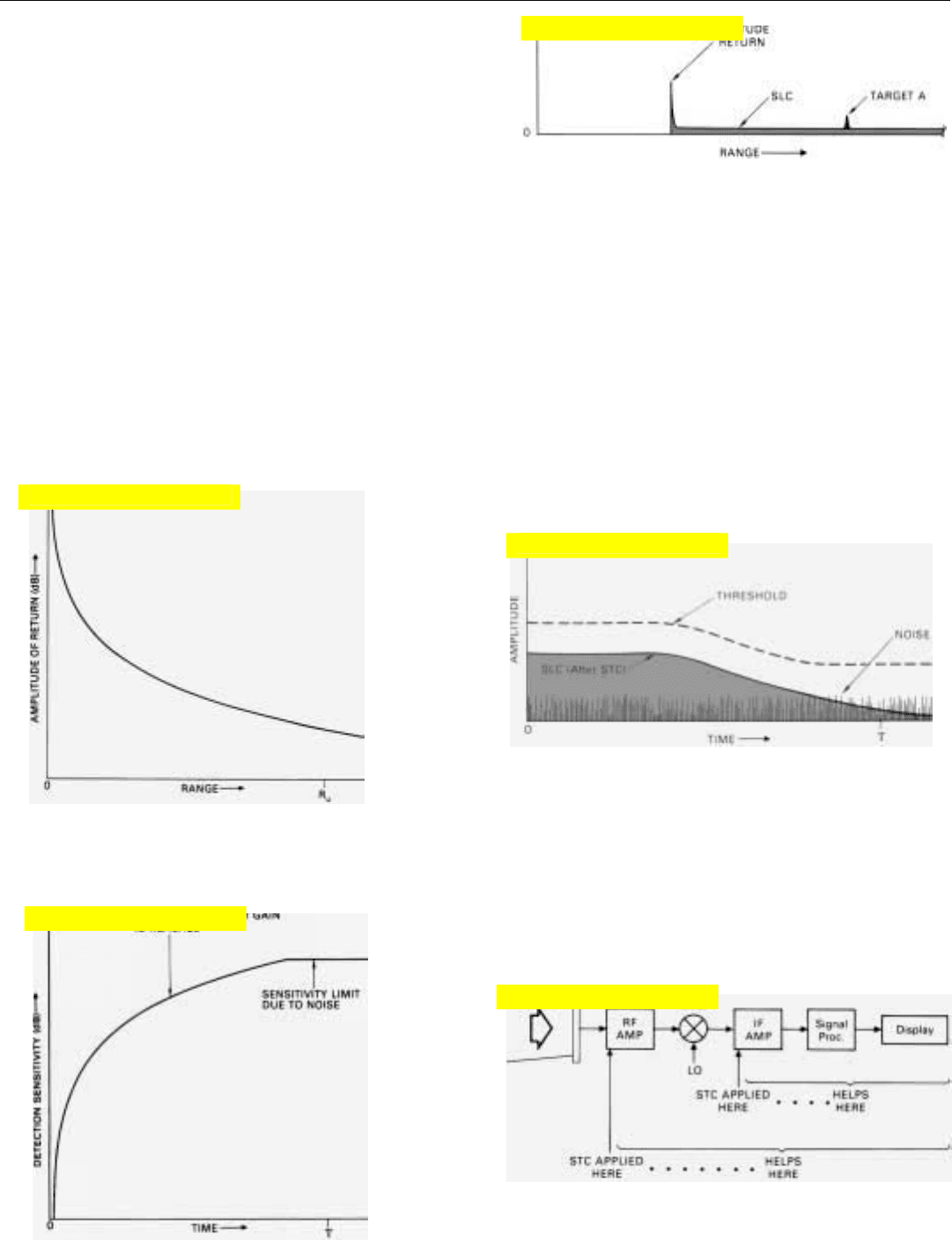
This is perhaps more clearly illustrated by the range pro-
file observed at the output of the receiver (Fig. 4). In it, the
amplitudes of both the target echoes and the sidelobe clut-
ter are more or less independent of range over the portion
of the profile in which strong sidelobe clutter is received.
This characteristic is due to a feature called sensitivity time
control (STC), which is generally employed when operating
at low PRFs.
Now, if we slice the range profile into increments match-
ing the width of the received pulses
1
and isolate the energy
CHAPTER 26 Low PRF Operation
337
4. Range profile at output of receiver. Sensitivity time control
(STC) makes amplitude of output independent of range to pre-
vent saturation by close-in return.
1. Compressed width, if pulse
compression is used.
SENSITIVITY TIME CONTROL
At low PRFs, saturation of the receiving system by strong
return from short ranges is commonly avoided without loss of
detection sensitivity at greater ranges through a feature called
sensitivity time control
, STC.
Atter each pulse has been transmitted, the system gain, which
initially is greatly reduced, is increased with time to match the
decrease in amplitude of the radar return with range. Maximum
gain is usually reached well before the end of the interpulse
period.
Thereafter, the increase in sensitivity is continued by
lowering the detection threshold until the noise limit is
reached—i.e., to the point where the threshold is just far
enough above the mean noise level to limit the false-alarm
probability to an acceptable value.
Thus, maximum sensitivity is provided at long ranges,
where it is needed to detect the weak echoes of distant
targets, while the strong return from short ranges is
prevented from saturating the system.
STC may be applied at various points in a system. From
whatever point it is applied, it helps prevent saturation in all
following stages.
Click for high-quality image
Click for high-quality image
Click for high-quality image
Click for high-quality image
Click for high-quality image
PART VI Air-to-Air Operation
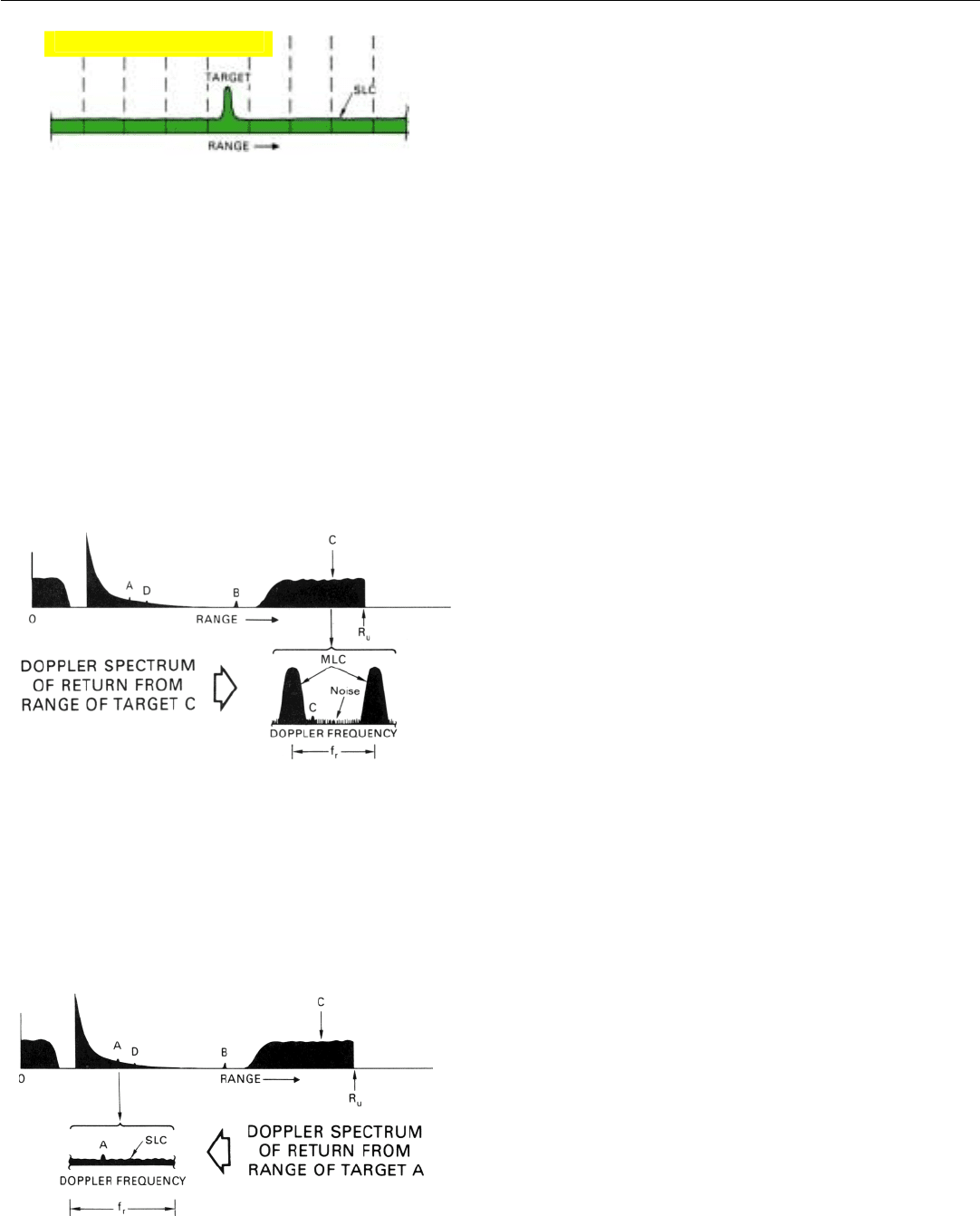
338
contained in each increment, we can differentiate between
target echoes and sidelobe return by noting the differences
in the amplitude from one increment to the next (Fig. 5).
But we are not so fortunate with mainlobe clutter.
Isolating the returns from narrow range increments only
moderates the problem. For the mainlobe clutter from a
target’s own range is generally much stronger than the tar-
get’s echoes. Moreover, even when mainlobe clutter is
received from a range that is some multiple of R
u
beyond
the target’s range (multiple-time-around return), it will gen-
erally be stronger than the target echoes. To differentiate
between target echoes and simultaneously received main-
lobe clutter, we must look for differences in doppler fre-
quency.
Doppler Profile. Since range is largely unambiguous
when low PRFs are used, the appearance of the doppler
profile varies considerably with the point in the interpulse
period at which the profile is observed. In other words, the
returns from different range increments may have quite dif-
ferent doppler profiles.
The doppler profile for the range increment in which
Target C resides is illustrated in Fig. 6. The most prominent
features of this profile are the periodic repetitions of the
mainlobe clutter spectrum. These occur at intervals equal to
the pulse repetition frequency, f
r
. Though they may be quite
wide, they are commonly called “lines” or, in view of their
spacing, PRF lines. (The central line is the carrier frequen-
cy; the others are sideband frequencies.)
Between successive PRF lines can be seen the thermal
background noise and Target C. Sidelobe clutter from this
range happens to be so weak that it is below the noise level.
As you may have noticed, had Target C’s doppler frequency
been a little lower, it might have been obscured by the
mainlobe clutter.
Target B is also at a sufficiently long range that the
accompanying sidelobe clutter is below the noise level.
Since in this particular flight situation mainlobe clutter is
not received from Target B’s range, this target will appear in
the clear regardless of its doppler frequency. It must com-
pete only with background noise.
At shorter ranges, such as that of Target A, sidelobe clut-
ter is much stronger than noise. Nevertheless, because the
accompanying sidelobe clutter comes from the same range
as the target’s echoes, the target appears above the clutter
(see Fig. 7).
Target D is a second-time-around target and so is not
wanted. Although it happens to be stronger than the
accompanying first-time-around sidelobe clutter, it can be
prevented from reaching the display by PRF jittering.
7. Target A, at short range, must compete with sidelobe clutter.
But since the clutter comes from the target’s own range, the
target echoes are stronger than the clutter.
5. If range profile is sliced into narrow increments, a target’s
echoes can be discerned from sidelobe clutter on basis of
amplitude.
6. A target at a range from which mainlobe clutter is received
can only be detected if it’s doppler frequency is different from
that of the clutter.
Click for high-quality image
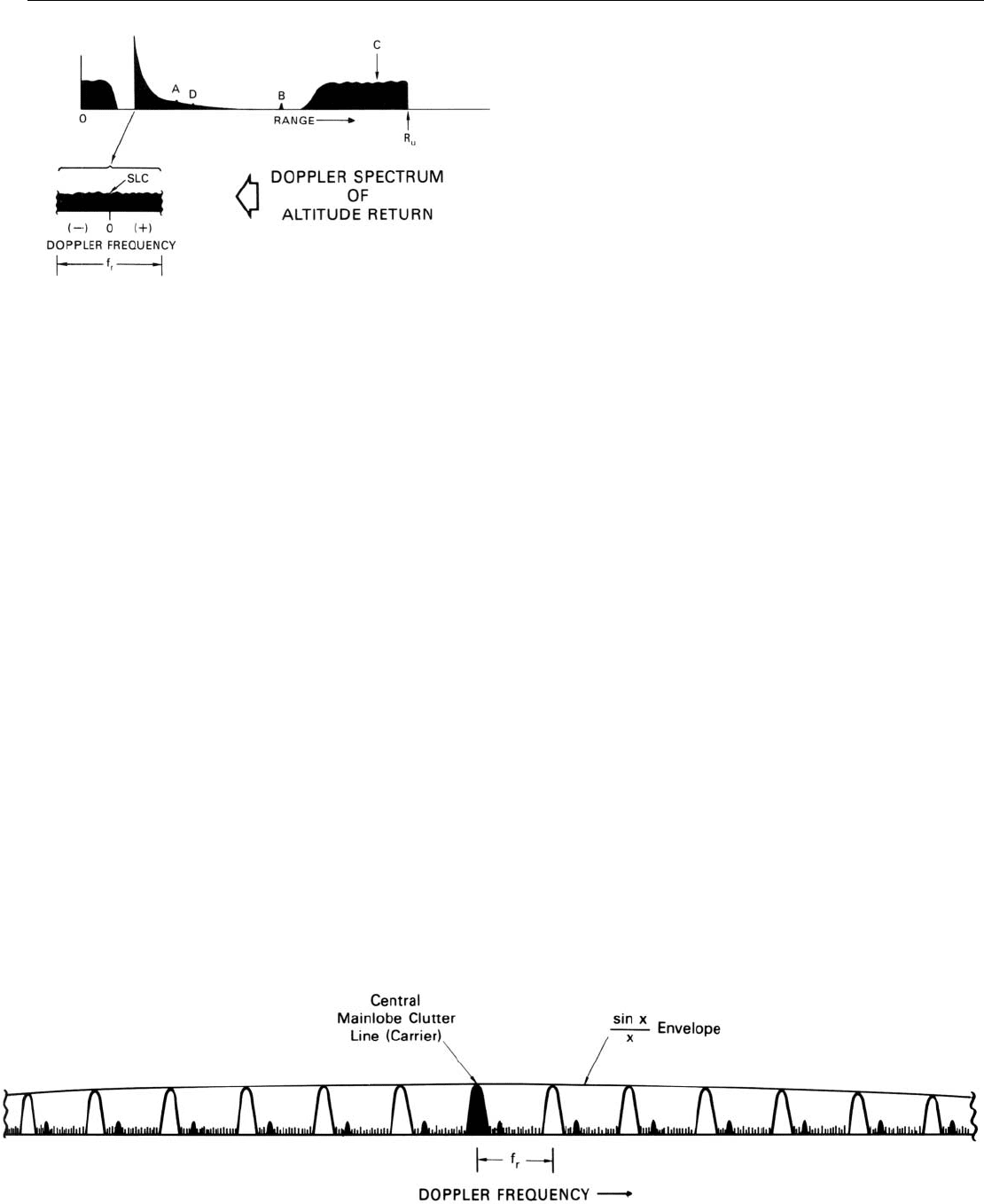
Figure 8 shows the doppler profile at the range of the
altitude return. As was explained in Chap. 22, the altitude
return is generally spread over a band of frequencies whose
width exceeds most low PRFs. Consequently, in the doppler
profile for a range increment from which altitude return is
received, it is indistinguishable from the other sidelobe
clutter.
Because the altitude return is spread over such a broad
band of doppler frequencies, if doppler filtering is employed,
a target may be detected above the altitude return, provided
the target’s echoes are very strong, as they may well be at
very short ranges.
(For the altitude return to be at a short
range, of course, the radar must be at low altitude.)
Figure 9 shows a fairly broad portion of the doppler
spectrum for a range from which mainlobe clutter is
received. To eliminate the clutter, we must reject not only
the band of frequencies in which the central line lies but
bands of equal width at intervals equal to f
r
throughout
the receiver’s IF passband. (Along with the clutter, some
target echoes may also be rejected.) Only sidelobe clutter
and noise, plus the (unrejected) target echoes will remain.
The target echoes may then be separated from the sidelobe
clutter and noise on the basis of differences in amplitude
and doppler frequency.
CHAPTER 26 Low PRF Operation
339
8. Altitude return is spread over such a broad band of frequencies
it is indistinguishable from the other sidelobe clutter.
9. Doppler profile for range from which mainlobe clutter is received consists of periodic repetitions of mainlobe clutter spectrum, with sidelobe
clutter and target echoes in between.
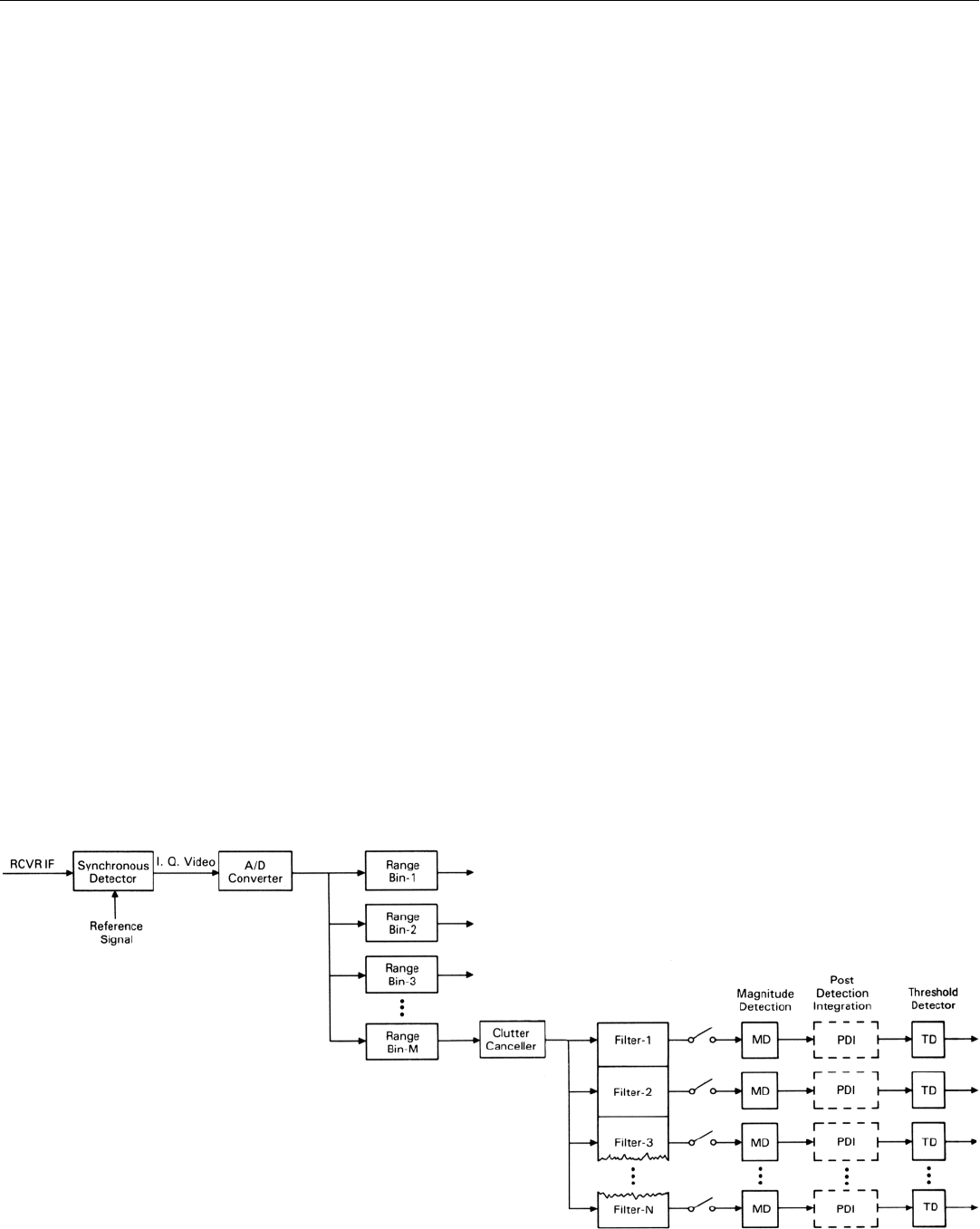
10. Signal processing functions in a low-PRF radar employing doppler filtering. In applications where mainlobe clutter is avoided, clutter can-
cellers may be eliminated.
PART VI Air-to-Air Operation
340
Signal Processing
One approach to mechanizing the signal processing
functions outlined in the preceding paragraphs is illustrated
by the block diagram of Fig. 10 (bottom of the page).
Basic Mechanization. As illustrated in Fig. 10, the IF
output of the receiver is fed to a synchronous detector
(such as described in Chap. 18), which converts it to I and
Q video signals. The frequency of the reference signal sup-
plied to the detector is such as to place the central line of
mainlobe clutter at zero frequency (dc). The central line is
picked, since its frequency doesn’t change when the PRF is
changed, whereas the frequencies of the other lines do.
(The importance of this will be made clear later on.)
An analog-to-digital converter samples the video signals
at intervals matching the width of the transmitted pulses.
2
The output of the converter therefore is a stream of num-
bers representing the I and Q components of the returns
from successive range increments. The numbers are sorted
by range increment into separate range bins.
To reduce the amount of mainlobe clutter, the numbers
for each range increment are passed through a separate
clutter canceller. As with the A/D converter, each clutter
canceller has both I and Q channels.
To reduce the mainlobe clutter residue in the output of
the canceller, as well as to minimize the amount of noise
and simultaneously received sidelobe clutter with which a
target must compete, the output of each clutter canceller is
integrated in a bank of doppler filters (as described in
Chaps. 19 and 20). So that the filter bank can be imple-
mented with the fast Fourier transform, the passband of the
bank is made equal to the PRF. Processing of the outputs for
2. Compressed width, if pulse
compression is used.