Gasch R., Twele J. (Eds.) Wind Power Plants: Fundamentals, Design, Construction and Operation
Подождите немного. Документ загружается.

412 12.2 Sensors and actuators
- Synchronous generator: variation of excitation,
- Variable-speed machine (synchronous or asynchronous): control of the
torque via AC-DC-AC converter,
- Asynchronous generator: pole switching e.g. from 4 poles to 6 poles,
- Asynchronous generator with slip rings: variation of the rotor resistance,
- etc.
12.2 Sensors and actuators
The classic centrifugal governor combines the functions of sensor (for the rota-
tional speed) and of actuator, as the above mentioned wind vane of the Western
mill does for yawing. It is still used today to control the blade angles of small
wind turbines, cf. annex I.
For larger wind turbines sensors and actuators are usually separated, because
the signal of one sensor is often required in several different processing units. The
most important sensors of a larger wind turbine are the following:
- Nacelle anemometer with wind direction indicator (e.g. wind vane),
- Rotational speed sensor,
- Electrical sensors for voltages, currents and phase angles,
- Vibration sensors,
- Sensors for oil temperature, pressure and oil level,
- Sensors for azimuth position of the nacelle and for the blade pitch angles,
- Limiting switches,
- etc.
The nacelle anemometer does not measure the real wind speed but only the wind
behind the rotor, the so-called “nacelle wind” – whatever it may represent. Conse-
quently, this signal is often only utilized to turn the generation of power on or off
but not for the control of rotational speed and power. The better wind speed meas-
uring device is the rotor itself, as we will learn in section 12.4.
The most important actuators for large wind turbines are:
- Hydraulic cylinders for yawing the nacelle and for pitching the blades,
resp.
- Electrical servo-motors for these purposes,
- Torque manipulation via the generator,
- Actuators for the brakes
- etc.
12 Supervisory and control systems for wind turbines 413
12.3 Controller and control systems
The essential control systems for large wind turbines have already been presented
in Fig. 12-5. They call for control of:
- AC-DC-AC-Converter,
- Excitation for the generator,
- Blade pitch and
- Yaw for the alignment of the rotor axis to the wind direction
The converter control has several objectives: e.g. maintaining the grid voltage
level and the adaption of the torque demand of the generator to the (optimum)
power output of the turbine rotor. At the time of entry into the grid it has to per-
form the synchronization and linking in the appropriate moment, etc.
For the design of machine controllers the necessary response speed of the con-
troller system is of importance. Wind turbine controllers have approximately the
following response speeds:
- Yaw system 360 degrees / 5 min
- Pitch system 2 to 8 degrees / sec
- Generator torque control fast
- Frequency control very fast
Torque control by the generator is at least ten times faster than via blade pitch!
The controllers applied in wind turbines are mostly simple (gain scheduled)
P-I-D controllers. More complex controllers like state-space controllers or ob-
server based systems have not come into use up to now. Table 12.2 gives an over-
view of the most important properties of standard controllers.
A pure proportional controller loop is found already at the Western mill for the
adjustment to the current wind direction with the wind vane and as well at the cen-
trifugal governor: the adjustment y is proportional to the controller input y = K
P
x.
The P controller acts fast, but a small residual offset from the demand value x
P
in
the control path has to be tolerated.
A remedy for this is a (mostly small) integral portion in the feedback. It reduces
the residual offset slowly to zero (PI controller).
If fast action is required to keep the control path under tight control, a differential
portion in the feedback is useful, but the accompanying inevitable time delay T
D
has to be taken into account.
In the past, PID controllers were analog devices built from amplifiers, resistors,
capacitors and inductors, available at the electronics supplier. Today, the control-
lers are implemented in digital form in the control computer where the supervisory
system is located as well.
414 12.3 Controller and control systems
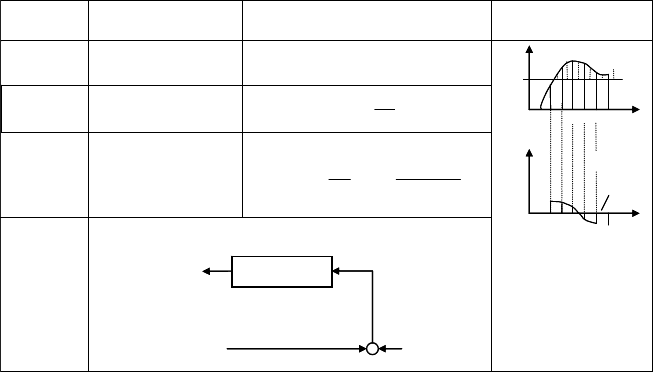
Table 12.2 Overview of different controller types
x
ˆ
y
ˆ
P
.
xy
P
.
x
ˆ
s
y
ˆ
I
P
¸
¹
·
¨
©
§
.
.
³
.. dtxxy
IP
x
ˆ
s1
s
s
y
ˆ
D
D
I
P
»
¼
º
«
¬
ª
7
.
.
.
xdtxx
yTy
DIP
D
...
³
controller
y
Actual value
x
a
-x
D
x = x
a
-x
D
x
D
x
time
y
k
input
y
0
=(a
0
x
0
+a
-1
x
-1
+a
-2
x
-2
...)
+ (b
-1
y
-1
+b
-2
y
-2
+...)
0
-2
-1-3
0
Attention:
Dead time
'
t as well as
missing or wrong data
output
P controller
Time domain Frequency domain Numerical representation
k
't
Controller
type
PI controller
PID controller
x
ˆ
y
ˆ
P
.
xy
P
.
x
ˆ
s
y
ˆ
I
P
¸
¹
·
¨
©
§
.
.
³
.. dtxxy
IP
x
ˆ
s1
s
s
y
ˆ
D
D
I
P
»
¼
º
«
¬
ª
7
.
.
.
xdtxx
yTy
DIP
D
...
³
controller
y
Actual value
x
a
-x
D
x = x
a
-x
D
x
D
x
time
y
k
input
y
0
=(a
0
x
0
+a
-1
x
-1
+a
-2
x
-2
...)
+ (b
-1
y
-1
+b
-2
y
-2
+...)
0
-2
-1-3
0
Attention:
Dead time
'
t as well as
missing or wrong data
output
P controller
Time domain Frequency domain Numerical representation
k
't
Controller
type
PI controller
PID controller
Some manufacturers develop the supervisory and control system on their own.
Others use standardized industrial controls like programmable logic controllers
(PLC) and customize them for the special needs of their wind turbines.
The actual sensor information x
a
is read in these digital systems with a kHz
sampling rate and compared to the demand value x
D
. Then the result, x = x
a
– x
D
,
is weighted by the PID controller, cf. Table 12.2.
The sampling causes a small dead time. But it is worse that from time to time
the data values of the sensor information x is distorted by noise from e.g. the
power electronics or other noise sources. Therefore, it is not reasonable to base the
controller action exclusively on the last two or three data values x
0
, x
-1
, x
-2 .
Commonly, the validity of the sensor information x is checked, e.g. by a least
square technique, before further processing it in the controller. Values which are
outside the confidence interval are identified, rejected and replaced by a reason-
able estimate.
Recently, new control concepts known as “individual pitch” have been intro-
duced. They manipulate the pitch of individual blades or vary the pitch angle in a
cyclic fashion (vertical wind profile). They are already applied in some commer-
cial wind turbines in order to reduce the blade loads. Of course, additional load
sensors in the blades are then necessary.

12 Supervisory and control systems for wind turbines 415
12.4 Control strategy of a variable-speed wind turbine with a
blade pitching system
What are the demand value settings for a wind turbine which operates in the
zone 1 of normal winds always with the optimal power extraction (Ȝ
= Ȝ
opt
,
c
P
= c
P.opt ,
J
= 0) , see Fig. 12-12 (4 to 9 m/s) and Fig. 12-15 (approx. 4 to 12
m/s)? And what are the setting values in zone 2 of strong winds where the power
extraction and the rotational speed are to be kept constant by blade pitching?
Since the wind signal of the nacelle anemometer is distorted by rotor and
nacelle and therefore cannot be trusted, we have to rely on the signal for the rota-
tional speed :. This makes sense since when operating at optimum tip speed ratio
(zone 1, constant blade pitch angle 0°) it is proportional to the wind speed:
Ȝ
opt
= R :/v = const. (12.4)
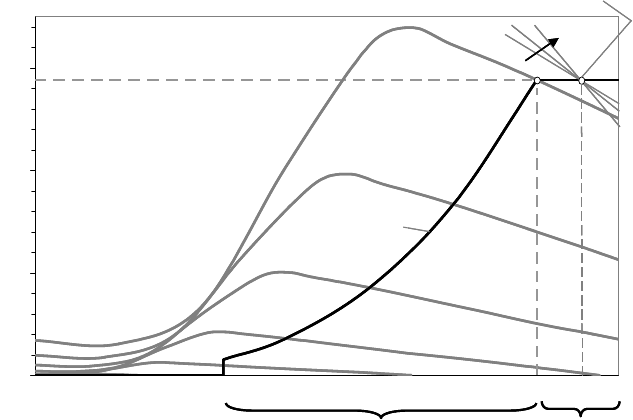
Next we consider the torque-speed characteristics of the turbine given in Fig.
12-15. This figure contains additionally the curve of Ȝ
opt
(maximum power extrac-
tion). It defines the values of torque that we want to be absorbed by the generator
for the normal winds, zone 1.
The corresponding control function for the torque demand values in its control-
ler is
M
gen
=
23
opt
5
Popt
)]2(/c[ :
OSU
R
(12.5)
M
gen
= [machine constant] · :
2
This tracking function for the generator torque demand M
gen
originates from the
equation for the rotor power
P = c
P
(ȡ /2) v
3
ʌ R
2
(12.6)
if we consider the torque equation M = P/
: and insert equation (12.4). The wind
speed no longer appears explicitly The machine constant is given by design data.
The signal of the rotational speed replaces the very doubtful signal of the nacelle
anemometer in the control strategy for normal winds. The rotor itself is the best
wind measuring device!
For strong winds, zone 2, above 12 m/s the control strategy is different. In the
simplest case we hold the torque constant by means of fast control actions of con-
verter and generator. But at the same time the blade pitching system has to be
activated in order to keep the rotational speed and consequently the power con-
stant, cf. Fig. 6-18. Due to the control loop dynamics the rotational speed at rated
power is slightly fluctuating. A certain speed “elasticity” during gusts is favorable
for relieving the structure and smoothing the power output.
416 12.5 Remarks on controller design
Drehzahl
:
Drehmoment M/M
nenn
4 m/s
6 m/s
8 m/s
10 m/s
100%
14...20 m/s
:
nenn
O
opt
,
J
=0°
12 m/s
:
Pitch
:
cut-in
Blade pitch, :|const.
zone 1:
normal winds
zone 2:
strong winds
R
Relative torque M / M
R
Angular speed ȍ
v =
OO
opt
,
J
J = 0r
Drehzahl
:
Drehmoment M/M
nenn
4 m/s
6 m/s
8 m/s
10 m/s
100%
14...20 m/s
:
nenn
O
opt
,
J
=0°
12 m/s
:
Pitch
:
cut-in
Blade pitch, :|const.
zone 1:
normal winds
zone 2:
strong winds
R
Relative torque M / M
R
Angular speed ȍ
v =
OO
opt
,
J
J = 0r
Fig. 12-15 Torque versus rotational speed and the curve Ȝ
opt
(best power coefficient) of a speed
variable wind turbine with synchronous generator and AC-DC-AC converter. Variable rotational
speed up to rated wind speed v
R
= 12 m/s
In order to avoid switching repeatedly back and forth between the control regimes
of normal and strong winds, the “constant” rotational speed of zone 2 is a little
higher than the “transition corner”. Morevoer, hysteresis is programmed into the
transitions from the zones 1 and 2 and back.
A constant torque is not always the control target in the range of strong winds.
It may be reasonable to choose the control target “constant power” in order to
counteract brief power surges in the generator during wind gusts.
12.5 Remarks on controller design
At the start of a design it is often helpful to initially decompose the system into
sub systems which are more or less independent of each other, e.g.
- Yaw control of the nacelle,
- Drive train control of torque and rotational speed,
- Electric – electronic control of the torque via generator and converter
system (fast) and moreover
12 Supervisory and control systems for wind turbines 417
- Electro-mechanical or hydraulic blade pitch control (slow)
- etc.
In the beginning, the application of classic analytical methods to the sub systems
will be useful. Often a linearized approach is sufficient for the design of the PID
controller. The controller settings for the coefficients K
P
, K
I
, K
D
and T
D
may be
preliminarily selected according to classical rules (e.g. Ziegler-Nichols, etc.). Next
more precise settings are obtained by digital simulation. If the solution seems to be
quite good, the non-linear digital simulation is started. Amplification and ampli-
tude limits and the non-linear behavior P = P (
J
,,
:
v )is introduced, etc. At this
point, the interdependences among the controllers will be taken into account. E.g.,
the drive train is influenced by a fast torque control from the electrical side and by
the slower blade pitch control from the aerodynamic side. So torsional vibrations
of the drive train may also have to be considered.
Software packages like SIMULINK are helpful here, since they provide a
straight-forward interface between the model for vibrations of the drive train and
the controller design work.
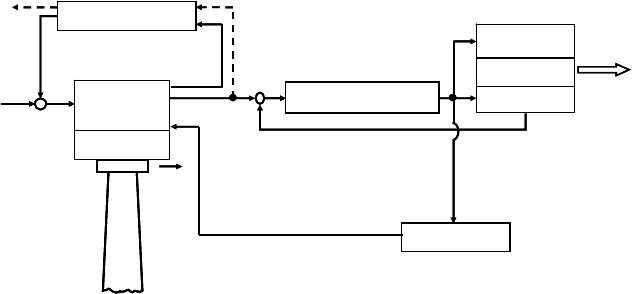
Structural dynamics also affect the control by way of the axial tower-nacelle
vibrations, Fig. 12-16. Due to the tower vibration movements u
T
(t) the rotor no
longer experiences the wind speed v
Wind
(t) but the difference between wind speed
and vibration velocity of the tower. The blade pitching influences the thrust on the
rotor and therefore the tower vibrations. An interaction occurs which may dampen
the tower vibrations in the axial direction or - in an unfavorable situation - lead to
controller induced self-excited vibrations.
Nowadays, the supervisory system is software based as well as the controllers.
Often classical industrial controllers (PLCs) are applied which then have to be
programmed accordingly. Only the safety system is hardware based.
vibrationtoduevelocityanddeflectiontoweraxialu,u
TT
Tower dynamics
Drive train i
nertia
El. Control
AC-DC-AC
Generator
T(:, v, J)
M
T
(:, v, J)
Turbine
v
wind
u
T
u
T
.
-
Thrust T
torque M
T
-M
T
torque
Electr.
power
-
M
generator
Pitch control
:
J
Pitch
Angular speed
˖
vibrationtoduevelocityanddeflectiontoweraxialu,u
TT
Tower dynamics
Drive train i
nertia
El. Control
AC-DC-AC
Generator
El. Control
AC-DC-AC
Generator
T(:, v, J)
M
T
(:, v, J)
Turbine
T(:, v, J)
M
T
(:, v, J)
Turbine
v
wind
u
T
u
T
.
u
T
.
-
Thrust T
torque M
T
-M
T
torque
Electr.
power
-
M
generator
Pitch control
:
J
Pitch
Angular speed
˖
Fig. 12-16 Interaction of pitch-control, tower vibration and drive train control
418 Annex I
Annex I
Examples for simple mechanical controllers
The simple controllers presented in this annex use the wind pressure (wind vane)
or the rotational speed (centrifugal mechanisms) for power resp. rotational speed
control. They have a good track record for wind turbines with up to 5 m rotor
diameter.
Control by wind pressure of wind turbines with a low tip speed ratio
Fig. 12-1 shows the two-vane control of a Western mill. Fig. 12-17 presents the
eclipse control where rotor thrust itself replaces wind pressure on the transverse
vane.
During normal operation, the aerodynamic moments of main and transverse
vane of the two-vane control are in equilibrium,
l
Trans
2
U
v
2
A
Trans
c
D
(
D
) = l
Main
2
U
v
2
A
Main
c
L
(
D
) (12.7)
where l
Trans
and l
Main
are the corresponding lever arms.
The pre-stressed spring holds the main vane at the end stop. If a threshold of
the wind speed is exceeded the spring lengthens. The start of control action is in-
fluenced by the geometry and the stiffness of the spring. If these are fixed, the
control behavior may be calculated, but some empirical approaches are required to
estimate the influence of the main vane [6].
0
2
2
D
U
Lmain
cAv
0
D
Fig. 12-17 Eclipse control
12 Supervisory and control systems for wind turbines 419
M
tr
M
s
v
M
tr
M
s [Nm]
M
tr
M
s
v
M
tr
M
s [Nm]
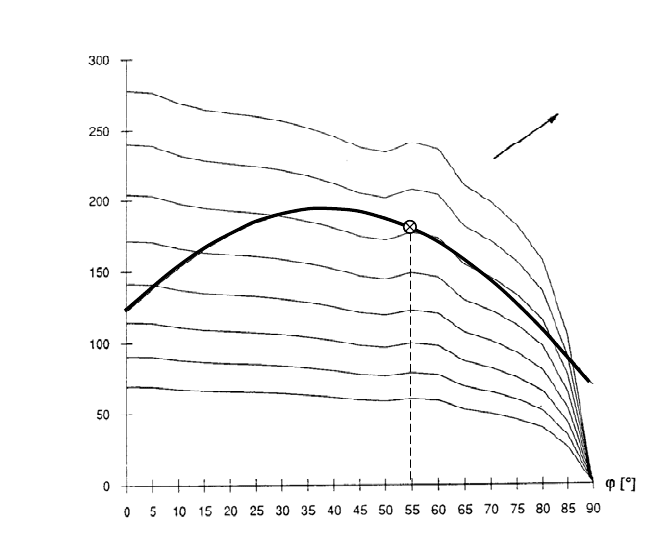
Fig. 12-18 Performance characteristics of a two vane control (see fig. 12-1); M
tr
is the moment
of the transverse wind vane, M
s
is the spring moment
Fig. 12-18 describes the control behavior of a wind turbine with a diameter of 4
m. The intersections of the spring curve M
S
and the wind vane moment curves rep-
resent the operating points where the moments are in equilibrium. For angles
smaller than 55
q, the control behavior is stable, above that angle, the rotor transi-
tions abruptly into its storm position of
M
= 90q.
For the eclipse control, Fig. 12-17, the thrust on the rotor replaces the force
which in the above was produced by the transverse vane.
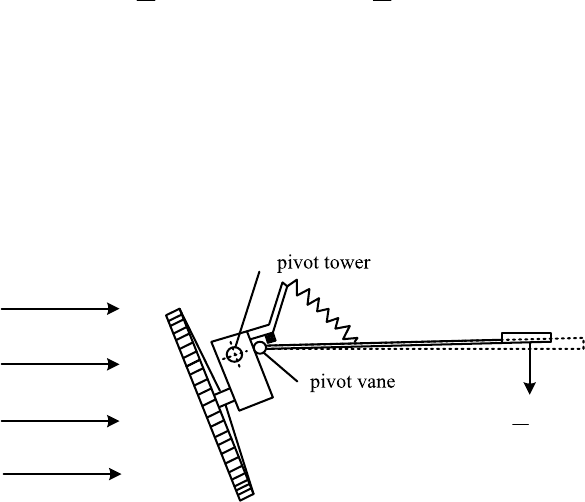
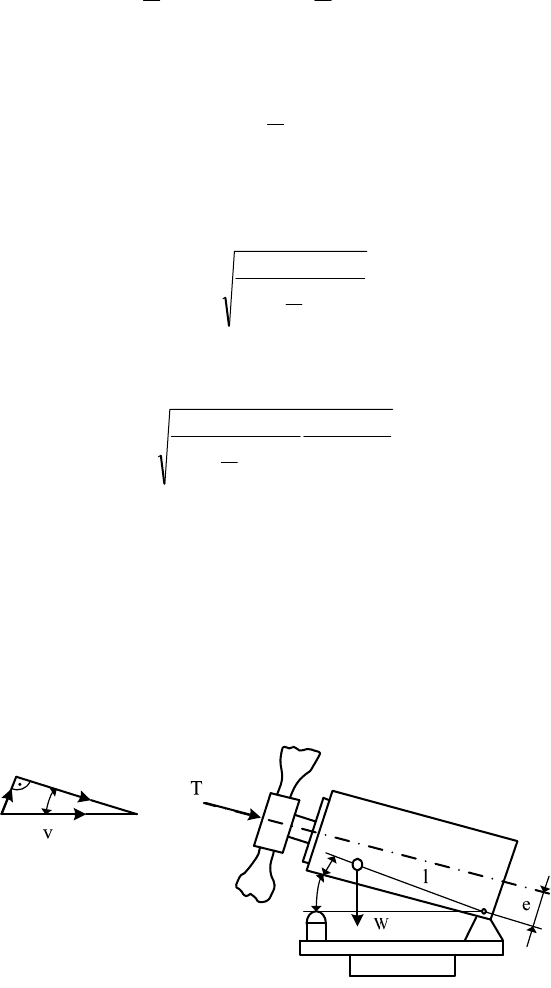
Control by wind pressure of wind turbines with a high tip speed ratio
Wind turbines with a high tip speed ratio can utilize the wind pressure for control,
too. Fig. 12-19 shows such a turbine where rotor thrust and weight determine the
position of equilibrium
D (tilting angle).
The low location of the center of gravity can be created by means of a beam,
which points downward and has a weight attached. The onset of the control can be
approximated for a given geometry.
To this end, the thrust of the tilted rotor has is
estimated as:
420 Annex I
D
U
O
U
O
22
rotorT
2
rotorT
cos
22
vAcvAcT
c
.
The moment equation at the hinge point is:
evAclW
D
U
OED
22
rotorT
cos
2
cos . (12.9)
Rearranging we obtain the limit of the wind speed for which the tilting angle
D
is
still 0°:
e
2
cos
rotorT
begin
Ac
lW
v
U
O
E
(12.10)
The range v > v
begin
is calculated to be:
D
ED
U
O
2
rotorT
cos
cos
e
2
Ac
lW
v
(12.11)
For turbines with a high tip speed ratio, the thrust coefficient is only slightly de-
pendent on the load. According to Betz, we have for the design point
c
T
(
O
opt
) = 8/9, and during idling, it increases to c
T
(
O
idle
) = 1.0 to 1.2, see section
6.3. Using the simplifying assumption of c
T
= 1, the control behavior shown in
Fig. 12-20 is obtained. If the center of gravity lies sufficiently low (
E
< 0), there
will be a smooth transition to the tilted position. Usually, the results of this coarse
calculation show a fairly good agreement with values observed in the field.
D
v
c
E
D
Fig. 12-19 Tilting rotor for a battery charger, active component v’ and lost component
12 Supervisory and control systems for wind turbines 421
begin
v
v
D
E
ED
ED
coscos
cos
v
v
2
begin
Fig. 12-20 Control behavior of a tilting rotor
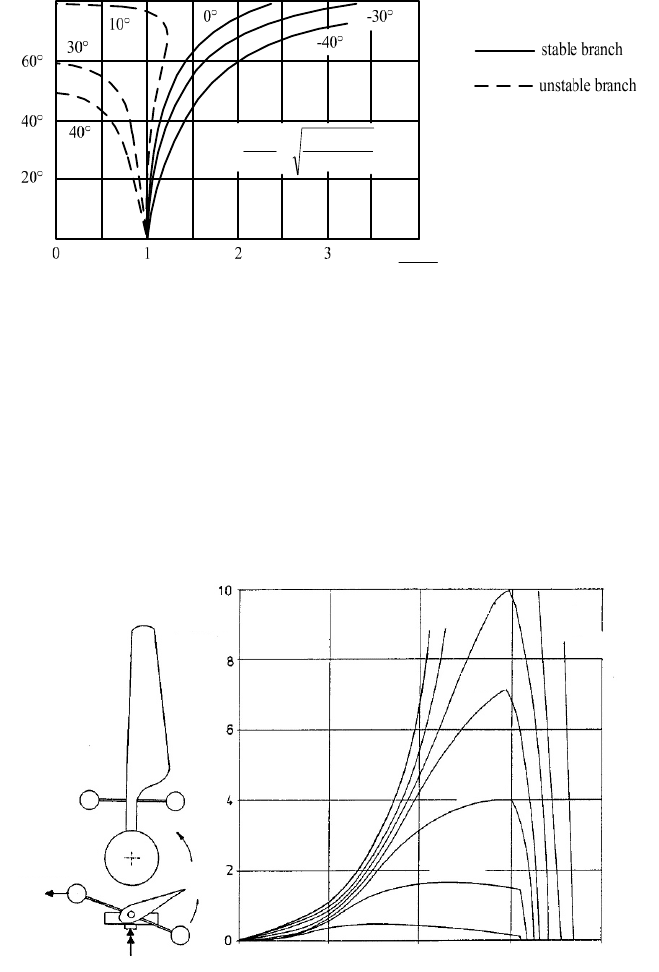
Control of wind turbines with a high tip speed ratio using centrifugal
mechanisms
Above a threshold of the rotational speed in the range of strong winds the cen-
trifugal mechanism will adjust the blade angle or the braking flaps smoothly.
0 40 80 120 min
-1
150
P[kW]
Propeller
torque
:
:
4 m/s
6 m/s
8 m/s
10 m/s
40 m/s
v = 12 m/s
16 m/s
F
centr
0 40 80 120 min
-1
150
P[kW]
Propeller
torque
:
:
4 m/s
6 m/s
8 m/s
10 m/s
40 m/s
v = 12 m/s
16 m/s
F
centr
Fig. 12-21 Principle of a pitch controller using the propeller torque from centrifugal weights and
the performance characteristics of such a rotor