Galaktionov V.A., Svirshchevskii S.R. Exact Solutions and Invariant Subspaces of Nonlinear Partial Differential Equations in Mechanics and Physics
Подождите немного. Документ загружается.

7 Partially Invariant Subspaces and GSV 383
in the separation problem (7.190) will lead to g(x , t) containing extra linear terms
g(x, t) = b(t)
K
i=1
(x
i
− ψ
i
(t))
2
+
N
i=K +1
C
i
(t)x
i
+ A(t). (7.210)
The principal calculations for deriving the corresponding ODE system (7.201), the
results, and formulae remain the same, with N replaced by K . Moreover, the ODEs
for extra coefficients C
i
immediately imply that C
i
= 0foralli ≥ K +1. Therefore,
explicit solutions with functions (7.209) and (7.210) truly belong to IR
K
and this
representation cannot supply us with new solutions.
Remarks and comments on the literature
The current notion of invariant sets on linear subspaces W
n
(partial invariance) was introduced
in [239], where various applications to PDEs with quadratic and cubic operators can be found
(wehavereflected some of the applications in this chapter).
§7.1.Solutions (7.4) were obtained in [397], where the solution structure (7.25) was also
proposed for a nonlinear second-order parabolic PDE.
§7.2.Quasilinear KS-type models were considered in [570], where some usual compactons
(7.37) with p = 0, were constructed.
§7.3.We use a slightly different version of the GSV introduced in [238], some other results
are taken from [239]. By the transformation
v = c
w
x
w
,
equation (7.86) reduces to a PDE with cubic nonlinearities, to which Baker–Hirota transfor-
mations apply, [100, 329]. Solutions (7.87) of equation (7.86) were also obtained by another
approach based on evolutionary invariant sets, [317].
§7.5.We mainly follow [225]. Notice that the orbits of ODEs (7.143) satisfy the comparison
principle, so that, for all the PDEs under consideration, the flows on sets M
0
are ordered
with respect to initial data. This is a natural property for the second-order parabolic equations
(in view of the Maximum Principle), but is rather surprising for higher-order PDEs, though
possibly it just reflects a simple geometric structure of these sets. The solution structure (7.139)
corresponds to the functional separation of variables; see Remarks to Section 8.4 for history
and references.
Further applications of evolutionary invariant sets to TFEs were given in [478], where the
extension of (7.132) in the form of the Bernoulli ODE
u
x
=
1
x
u + u
n
was used (note that almost all explicit solutions therein admit polynomial representation on
partially invariant subspaces); see also [479] for further extensions concerning sets (7.147).
There exist attempts to treat general sets
u
x
= G(x, t, u)
which often lead to complicated calculus; see [440] and Section 8.3 for parabolic equations.
Applications to the KdV-type equations
u
t
= u
xxx
+ ψ(u)u
x
(7.211)
and to more general quasilinear ones, can be found in [223]. For (7.211), the ODE for H is
H(HH
)
− 6HH
− 3(H
)
2
+ 9H
− 6 = 0, where ψ(u) = exp
u
1
dz
H(z)
. (7.212)
© 2007 by Taylor & Francis Group, LLC
384 Exact Solutions and Invariant Subspaces
It is curious that (7.212) admits two linear solutions, (i) H
1
(u) = u, i.e., the KdV equation,
u
t
= u
xxx
+ uu
x
, and (ii) H
2
(u) = 2u, corresponding to
u
t
= u
xxx
+
√
uu
x
,
possessing the explicit blow-up solution
u(x, t) =
x
2
(−t)
2
.
Therefore, the KdV equation plays the role of a “limit” one (for u 1) in the family of PDEs
(7.211) admitting M
0
; see details in [223]. Let us point out another KdV-type equation
u
t
= u
xxx
+ lnuu
x
,
that admits explicit solutions
u(x, t ) = e
C
1
(t)+C
2
(t)x
on a simple linear subspace with
C
1
= C
1
C
2
+ C
3
2
,
C
2
= C
2
2
.
§7.6.Exact solutions (7.197) in IR
2
and IR
3
were constructed in [57] by the direct similarity
reduction (in IR
2
)
u(x, t) = ar f (θ), where (7.213)
r
2
= x
2
1
+ (x
2
− Vt)
2
,
θ = tan
−1
x
1
x
2
−Vt
.
The resulting ODE for f admits the explicit solution
f (θ) =
1
2
(1 −cos θ).
Similar solutions were constructed [58] for the fourth-order TFE
u
t
=−∇·(u
n
∇u) in IR
2
× IR
+
, (7.214)
but, in this case, the ODE for f in (7.213) cannot be solved explicitly for n = 3. This con-
firms the general conclusion that the solution structure (7.184) does not apply to higher-order
PDEs. Substituting this into (7.214) with n = 1(orn = 2) leads to the analysis on linear
subspaces of dimension larger than two that makes the PDE system more overdetermined and
the consistency much more suspicious.
The form of solutions (7.184), (7.186) was proposed by the authors of [501] (see earlier
references therein), where systems (7.187) and that for p =
1
2
were derived and partially ana-
lyzed (our more complete analysis is different). Exact solutions with the quadratic g(x, t) for
N = 2, m = 0 can be found in [502] (other solutions in IR
N
constructed therein for which
functions f and g are quadratic on 2D subspaces only, represent the same case). Some solu-
tions in the case of (7.208) were detected in [501] by a sophisticated computational approach;
as we have shown, other solutions there with quadratic forms in IR
K
for all dimensions K < N
are of the same nature and are not new.
Open problems
• In particular, some open problems are given in Sections 7.2, 7.4.4, 7.4.5, and
7.5.1.
© 2007 by Taylor & Francis Group, LLC
CHAPTER 8
Sign-Invariants for Second-Order Parabolic
Equations and Exact Solutions
We underline a new important aspect of invariant subspaces for nonlinear operators. Our goal
is to show that, for second-order parabolic PDEs, proper families of exact solutions may define
the so-called sign-invariants (SIs) of parabolic flows, which are nonlinear operators preserving
their signs, “
≥
” and “
≤
,” on evolution orbits. Vice versa, the known SIs may specify the cor-
responding exact solutions. We will mainly concentrate on the related backward problem: by
constructing sign-invariants describe subspaces or sets of the corresponding solutions. Many
SIs are generated by differential constraints, which thus preserve their signs. This is an impor-
tant (and not always well understood) feature of differential constraints for parabolic equations
obeying the Maximum Principle.
Our basic model is a quasilinear heat equation of the general form
u
t
= F[u] ≡∇·(k(u)∇u) + f (u) in IR
N
× IR
+
, (8.1)
where k(u) ≥ 0and f (u) are given smooth functions. We will consider the Cauchy
problem for (8.1) with given sufficiently smooth initial data u(x, 0) = u
0
(x ) in IR
N
,
and assume that there exists a unique sufficiently smooth solution u = u(x , t),at
least locally in time.
We say that the first-order operator H[u] = H (x , u, ∇u, u
t
) is a sign-invariant
(SI) of the equation (8.1) if, for any solution u(x , t), the following holds:
(1) H[u(x, 0)] ≥ 0inIR
N
⇒ H[u(x, t)] ≥ 0inIR
N
for t > 0,
(2) H[u(x, 0)] ≤ 0inIR
N
⇒ H[u(x, t)] ≤ 0inIR
N
for t > 0,
i.e., both signs of H[u] are preserved in evolution. Such an evolution invariance of
signs is controlled by the Maximum Principle (MP). Since, by definition, any sign-
invariant H[u]isalsothezero-invariant, i.e.,
H[u(x, 0)] = 0inIR
N
⇒ H[u(x, t)] = 0inIR
N
for t > 0, (8.2)
this makes it possible to construct exact solutions of equations (8.1) if we know how
to integrate the first-order PDE in (8.2). We will derive finite and, in some cases,
infinite-dimensional sets of equations (8.1) possessing solutions that are expressed
in terms of dynamical systems or algebraic relations. It turns out that these solutions
often belong to some linear invariant subspaces or sets.
Using these connections with SIs, a number of higher-order PDEs admitting sim-
ilar subspaces and solutions will be found. In view of the lack of the MP, we then
lose the SI properties, but the rest of the analysis, including exact solutions, remains
valid.
© 2007 by Taylor & Francis Group, LLC
386 Exact Solutions and Invariant Subspaces
8.1 Quasilinear models, definitions, and first examples
Thus, in order to avoid posing suitable boundary conditions, which are not essential
in the present context, we consider the Cauchy problem with smooth initial data
u(x , 0) = u
0
(x ) in IR
N
, (8.3)
and assume that there exists a unique local-in-time solution u(x, t). According to
classical parabolic theory, this requires some extra hypotheses on the coefficients of
(8.1) and on the class of initial functions u
0
.
8.1.1 On weak and proper solutions
We illustrate our main results by taking quasilinear heat equations (8.1), which are
widely used in applications in diffusion, combustion, and filtration theory. Since we
are going to use the MP, let us be more specific about the nonlinear coefficients
of the PDEs under consideration. The functions k(u) and f (u) are assumed to be
sufficiently smooth. For solvability of parabolic PDEs, we impose the parabolicity
condition
k(u) ≥ 0.
For k(u) ≡ 1, there occurs the semilinear heat equation
u
t
= F
1
[u] ≡ u + f (u) in IR
N
× IR
+
, (8.4)
where is the Laplace operator in IR
N
. For smooth functions f (u), the Cauchy
problem for such equations admits a unique classical solution. Even for uniformly
parabolic equations, for non-Lipschitz or singular absorption terms, such as
f (u) =−u
p
, with the exponent p ∈ (−1, 1) (8.5)
(we have dealt with modelslike that before, especially for f (u) =−1forp = 0),the
nonnegative solutions may exhibit finite interfaces and need smooth approximations
as weak or maximal/minimal proper solutions. Furthermore, we do not hesitate to
consider degenerate PDEs (8.1) with k(0) = 0, e.g., the PME, where k(u) = u
σ
with a fixed exponent σ>0. For the PME, weak solutions u(x , t) of the Cauchy
problem can be compactly supported and are not smooth at the interfaces, where
u= 0, and the PDE is degenerate. See basics of PME theory in [245, Ch. 2]. In this
case, to justify manipulations with derivatives, we impose a conventionalassumption
that we actually deal with regular approximations of weak solutions. We assume that
the weak solution u(x , t) is determined as the limit of a sequence {u
n
} of smooth
solutions,
u(x , t) = lim u
n
(x , t) as n →∞.
Here, each solution u
n
(x , t) solves a regularizeduniformly parabolic PDE (8.1)with
the heat conduction coefficient k(u) replaced by its strictly positive approximation
k
n
(u) satisfying k
n
(u) ≥
1
n
> 0forallu,andk
n
→ k as n →∞uniformly on
bounded u-intervals. For instance,
k
n
(u) =
k
2
(u) +
1
n
2
.
© 2007 by Taylor & Francis Group, LLC

8 Sign-Invariants and Exact Solutions 387
For non-smooth absorption terms (8.5), the uniformly Lipschitz (analytic) approxi-
mation
f
n
(u) =
1
n
2
+ u
2
p−1
2
u
is also used. If necessary, initial data are replaced by bounded smoother truncations
u
0n
(x ) → u
0
(x ) as n →∞uniformly on compact subsets.
The PDE for u
n
(x , t) is uniformly parabolic with smooth coefficients, so u
n
(x , t)
is regular enough for our manipulations. The approximation (regularization) tech-
niques lie in the heart of modern theory of quasilinear singular parabolic PDEs of
arbitrary order; see references in [226, Sect. 6.2]
8.1.2 Maximum Principle and first examples of sign-invariants
The MP is the cornerstone of classical theory of second order parabolic PDEs, as ex-
plained in many well-known books and monographs, [148, 164, 205, 472, 530]. The
MP and various order-preserving comparison techniques and results are associated
with the fact that the Laplacian u has definite signs “≥” or “≤” at an extremum in
x for C
2
x
smooth solutions u(x, t). For instance, as a typical simple application of the
MP for equations (8.1) and (8.4) with smooth coefficients and f (0) = 0, we have
the comparison with the trivial solutions u = 0, i.e.,
u
0
(x ) ≥ 0 (≤ 0) in IR
N
⇒ u(x, t) ≥ 0 (≤ 0) in IR
N
for t > 0. (8.6)
This is the evolution invariance of the sign of the solutions u(x , t). On the other
hand, a slightly modified comparison implies that the monotonicity with time prop-
erty holds
u
t
(x , 0) ≥ 0 (≤ 0) in IR
N
⇒ u
t
(x , t) ≥ 0 (≤ 0) in IR
N
for t > 0. (8.7)
This is the invariance with time of the sign of the derivativeu
t
(in fact, this represents
a first simpleSI). Bearingin mind necessaryhypotheseson the coefficientsand initial
data, here the MP in the following form is used. Let a smoothfunction J (x , t) satisfy
a linear parabolic PDE
J
t
= M[J ] ≡ A J +B ·∇J +CJ in IR
N
× IR
+
, (8.8)
where A ≥ 0, B = (B
1
, ..., B
N
),andC are given bounded coefficients, depending
on x, t, and possibly u (the dot “·” denotes the scalar product in IR
N
). Then,
J (x, 0) ≥ 0 (≤ 0) in IR
N
⇒ J (x, t) ≥ 0 (≤ 0) in IR
N
for t > 0.
As above, a rigorous proof uses suitable hypotheses on the coefficients of (8.8) and
also on the behavior of J(x, t) as |x |→∞.
Therefore, property (8.6) follows immediately from the MP, since equations (8.1)
and (8.4) have been already written down in the form of (8.8) for the function J = u.
To show (8.7), one needs to differentiate the PDE with respect to t to obtain (8.8) for
J = u
t
, assuming, as usual, that the regularity of all the functions and coefficients is
enough for such manipulations.For instance, differentiating (8.1) yields, for J = u
t
,
J
t
= k(u)J + 2∇k(u) ·∇J +[k(u) + f
(u)]J, (8.9)
© 2007 by Taylor & Francis Group, LLC
388 Exact Solutions and Invariant Subspaces
which is precisely (8.8) with A = k(u), B = 2∇k(u),andC = k(u) + f
(u).
In addition,since the first x
i
-derivative J = u
x
i
for anyi = 1, 2, ..., N satisfies the
same equation (8.9), the MP also implies the following space monotonicity property
(cf. (8.7)):
(u
0
)
x
i
≥ 0 (≤ 0) in IR
N
⇒ u
x
i
(x , t) ≥ 0 (≤ 0) in IR
N
for t > 0.
This means the evolution invariance of the sign of u
x
i
. We next consider examples
of more complicated and practical SIs.
8.1.3 First-order sign-invariants
We turn to the general problem of finding first-order SIs for a general fully nonlinear
parabolic PDE of the form
P[u] ≡ u
t
− L(x, u, ∇u,u) = 0inIR
N
× IR
+
, (8.10)
where L(x, u, p, q) is a given C
∞
-function satisfying the parabolicity condition
L
q
(x , u, p, q) ≥ 0inIR
N
× IR × IR
N
× IR . (8.11)
As above, consider the Cauchy problem for (8.10) with initial data (8.3). For conve-
nience, let us introduce the set of proper initial functions and solutions of (8.10),
ω
P
={u
0
(x ) ∈ C
2
: ∃ a unique solution u(x , t) ∈ C
∞
},
P
={u ∈ C
2
: u(x , t) solves (8.10) with u
0
∈ ω
P
}.
Consider a general nonlinear first-order Hamilton–Jacobi operator of the form
H[u] ≡ H (x, u, ∇u, u
t
), (8.12)
where H (x, u, p, q) is a C
∞
-function. We will study the sign of H[u] on the evolu-
tion orbits from
P
. Therefore, consider the reduced operator
H
P
[u] ≡ H (x, u, ∇u, L(x , u, ∇u,u)) in
P
,
where u
t
is replaced by L(x, u, ∇u,u) via (8.10). This gives the following sets:
S
+
H,P
=
v(x ) ∈ C
2
: H
P
[v] ≥ 0inIR
N
∩ ω
P
, (8.13)
S
−
H,P
=
v(x ) ∈ C
2
: H
P
[v] ≤ 0inIR
N
∩ ω
P
. (8.14)
Definition 8.1 The first-order operator (8.12) is said to be a sign-invariant of the
equation (8.10) if both signs of H are preserved with time,
∀u
0
∈ S
+
H,P
(S
−
H,P
) ⇒ u(·, t) ∈ S
+
H,P
(S
−
H,P
) for t > 0. (8.15)
If the sign of the operator (8.12) on evolution orbits {u(x , t), t > 0}, i.e., the
inequality
H
P
[u(x , t)] ≥ 0 (or ≤ 0) in IR
N
for t > 0,
is known, integrating it yields estimates for solutions of the nonlinear parabolic PDE
(8.10). Very often such estimates are an important part of general parabolic theory,
© 2007 by Taylor & Francis Group, LLC
8 Sign-Invariants and Exact Solutions 389
where the structural properties of possible operators H[u] play a key role. In sub-
sequent sections, we present special approaches to finding nontrivial pairs of the
operators {P , H} such that (8.15) holds.
8.1.4 Sign-invariants, zero-invariants, exact solution, and differential constraints
Using (8.13) and (8.14), it is natural to introduce the set
S
0
H,P
= S
+
H,P
∩ S
−
H,P
=
v(x ) ∈ C
∞
: H
P
[v] = 0inIR
N
∩ ω
P
.
It follows from (8.15) that any SI (8.12) also becomes a zero-invariant of (8.10),
in the sense that the set S
0
H,P
is evolutionary invariant under the flow generated by
(8.10), i.e.,
∀u
0
∈ S
0
H,P
⇒ u(·, t) ∈ S
0
H,P
for t > 0.
This implies that the parabolic equation (8.10) restricted to the invariant set S
0
H,P
is
equivalent to the Hamilton–Jacobi equation
H (x, u, ∇u, u
t
) = 0, with u(·, t) ∈ S
0
H,P
for t > 0. (8.16)
It is easier to solve the first-order equation (8.16) than the second-order parabolic
PDE (8.10), and, in some cases, this can be done explicitly. In several cases, such
exact solutions can be treated from the point of view of linear finite-dimensional
subspaces that are (partially) invariant under certain nonlinear operators.
In terms of zero-invariants, (8.16) represents a differential constraint associated
with the nonlinear PDE (8.10). In general, the problem of determining differential
constraints (in our case, the function H (·)) is reduced to a complicated nonlinear
PDE for H (a compatibility condition), depending on the operator L. This problem
cannot be solved even in simpler particular cases. We find several examples, show-
ing how to find a first-order differential constraint. In this analysis, we use some
known approaches via the MP coming from qualitative theory of nonlinear parabolic
PDEs. In particular, we essentially use results from the theory of blow-up solutions
of quasilinear heat equations, which was the origin of a number of new ideas and
techniques.
8.2 Sign-invariants of the form u
t
− ψ(u)
Let us apply such SIs to general fully nonlinear parabolic PDEs
P[u] ≡ u
t
− L(u, |∇u|,u) = 0inIR
N
× IR
+
, (8.17)
where L(u, p, q) issmoothand satisfies the parabolicityconditionlike (8.11).There-
fore, we may assume that there exists a smooth function +
0
(u, p, s) such that
L(u, p,+
0
(u, p, s)) ≡ s for (u, p, s) ∈ IR × IR
+
× IR . (8.18)
We will look for SIs of (8.17) of the form
H[u] ≡ u
t
− ψ(u), (8.19)
© 2007 by Taylor & Francis Group, LLC
390 Exact Solutions and Invariant Subspaces
where ψ(u) is a smooth unknown function. Set
L
−1
(u, p) = +
0
(u, p,ψ(u)), (8.20)
and denote L
u
(u, p, q) =
∂ L
∂u
and L
p
(u, p, q) =
∂ L
∂p
, ..., where the argument q is
replaced by +
0
(u, p,ψ(u)).
Theorem 8.1
Operator
(8.19)
is a sign-invariantof the equation
(8.17)
if
ψ
satisfies
the following identity for
(u, p) ∈ IR × IR
+
:
F(u, p) = (L
u
− ψ
)ψ + L
p
ψ
p + L
q
(ψ
p
2
+ ψ
L
−1
) ≡ 0. (8.21)
Proof. Setting J = u
t
− ψ(u) yields, on differentiation,
J
t
= u
tt
− ψ
u
t
. (8.22)
Calculating u
tt
from (8.17) implies
u
tt
= L
u
u
t
+ L
p
(∇u ·∇u
t
)
1
|∇u|
+ L
q
u
t
. (8.23)
Since u
t
= J + ψ(u), J solves a linear parabolic PDE of the form
J
t
= M[J ] +F, (8.24)
where M is an elliptic operator as in (8.8) with A = L
q
and coefficients B and C
from (8.23). By the MP, it follows from (8.24) that (8.19) is an SI if (8.21) holds.
Assuming a one-sided partial differential inequality for F,say,
F(u, p) = (L
u
− ψ
)ψ + L
p
ψ
p + L
q
(ψ
p
2
+ ψ
L
−1
) ≥ 0, (8.25)
the MP guarantees that precisely the sign “≥” is only preserved for the operator
(8.19), i.e.,
u
t
− ψ(u) ≥ 0fort > 0inIR
N
, (8.26)
provided that the same inequality holds for the initial data at t = 0. In classical
parabolic theory, such one-sided inequalities are typically associated with the bar-
rier techniques. Of course, if only a one-sided estimate is necessary, this essentially
widens the set of possible solutions {ψ} of the partial differential inequality (PDI)
(8.25) and gives other estimates by integrating the PDI (8.26). The one-sided ap-
proach is not associated with exact solutions, and will not be considered in this
text. One-sided estimates have a range of important applications in blow-up theory
of reaction-diffusion PDEs; different applications are described in [509, Ch. 7] and
[245, Ch. 10].
Let us return to the main identity (8.21) that is a nonlinear PDE for ψ,whichis
difficult to analyze for general operators L in (8.17). Our study is now restricted to
the class of quasilinear heat equations.
8.2.1 Quasilinear heat equations and higher-order extensions
As the first application of Theorem 8.1, consider quasilinear equations (8.1) for
which (8.21) reduces to a system of two ODEs.
© 2007 by Taylor & Francis Group, LLC
8 Sign-invariants and Exact Solutions 391
Corollary 8.2 Operator (8.19) is a sign-invariant of equation (8.1) iff ψ(u) satisfies
the ODE system
(kψ)
k
= 0, k
ψ
2
− f
2
kψ
f
= 0. (8.27)
Proof. By (8.1), L(u, p, q) = kq + k
p
2
+ f, so that
L
−1
=
1
k
(ψ − f − k
p
2
), L
p
= 2k
p, L
q
= k,
and L
u
=
k
−
(k
)
2
k
p
2
+ f
+
k
k
(ψ − f ).
(8.28)
Plugging (8.28) into (8.21) yields
F(u, p) = k
(kψ)
k
p
2
+
1
k
k
ψ
2
− f
2
kψ
f
.
Since the variables u and p are independent, identity (8.21) is valid, provided that
(8.27) holds.
The system of ODEs (8.27) for two unknowns {ψ, f } can be easily integrated.
This yields the following family of equations.
Example 8.3 (Invariant subspaces: blow-up)Letϕ(u) be an arbitrary smooth
function such that the inverse ϕ
−1
exists. Denote k(u) = ϕ
(u) ≥ 0. Solving (8.27)
gives the quasilinear heat equation
u
t
= ϕ(u) +
aϕ(u)+b
ϕ
(u)
+ [aϕ(u) + b]c, (8.29)
where a
2
+ b
2
= 0. By (8.19), the PDE (8.29) admits the following SI:
H[u] ≡ u
t
−
aϕ(u)+b
ϕ
(u)
≡ H (u, u
t
). (8.30)
The ordinary differential operator (8.30) is also a zero-invariant of the PDE (8.29).
This means that if, for a solution u(x , t),
H (u, u
t
) ≡ ϕ(u) + [aϕ(u) + b]c = 0inIR
N
for t = 0, (8.31)
then
H (u, u
t
) = 0inIR
N
for t > 0. (8.32)
Equation (8.32), (8.30) is integrated as a standard ODE (ϕ(u))
t
= aϕ(u) + b.This
yields the following exact solutions u(x, t) of (8.29).
(i) If a = 0, then
ϕ(u(x , t)) =
1
a
[ρ(x)e
at
− b], (8.33)
where ρ(x) is an arbitrary solution of the linear elliptic PDE
ρ +acρ = 0inIR
N
. (8.34)
(ii) If a = 0 (b = 0),then
ϕ(u(x , t)) = ρ(x) + bt, where ρ + bc = 0inIR
N
.
Besides such exact solutions, the SI (8.31) makes it possible to estimate more solu-
tions by using the inequality
u
t
−
aϕ(u)+b
ϕ
(u)
≥ 0 (or ≤ 0) for t ≥ 0.
© 2007 by Taylor & Francis Group, LLC
392 Exact Solutions and Invariant Subspaces
u(x , t)
π
2
−
π
2
π
−π
s
+
(t
2
)
s
−
(t
2
)
t
1
t
2
t
3
t
1
< t
2
< t
3
x
0
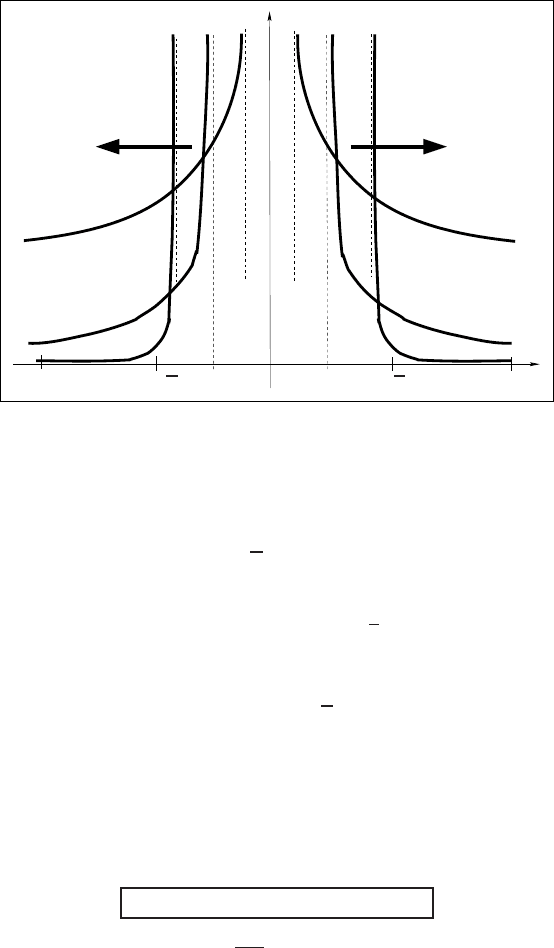
Figure 8.1 Stabilizing blow-up interfaces of the solution (8.36) of the PDE (8.35).
Blow-up interfaces. In the fast-diffusion case ϕ(u) =−u
−m
, m > 0, with a = b =
c = 1andN = 1, we obtain from (8.29) the 1D equation
u
t
=−(u
−m
)
xx
+
1
m
(u − u
m+1
) + 1 − u
−m
. (8.35)
According to (8.33), taking ρ(x) = cosx yields the explicit 2π-periodic solution
u(x , t) = (1 − e
t
cosx)
−
1
m
, (8.36)
with blow-up interfaces propagatingas follows:
s
±
(t) =±cos
−1
(e
−t
) →±(
π
2
)
∓
as t →∞.
Such unusual blow-up behavior is illustrated in Figure 8.1. The FBP with blow-
up interfaces and their dynamic equations are rigorously justified by the Sturmian
intersection comparison approach, [226, Ch. 7].
Invariant subspaces. It is easy to interpret these exact solutions in terms of invariant
subspaces. Consider the case a = 0. Using in (8.29) the Kirchhoff-type transforma-
tion v = aϕ(u) + b yields the following quasilinear equation:
v
t
= F[v] ≡ (v)(v +acv) + av, (8.37)
with the coefficient (v) = ϕ
(ϕ
−1
(
v−b
a
)). Let us introduce the subspace
W ={ρ(x) : ρ solves (8.34)}. (8.38)
The existence of explicit solutions (8.33) is then a straightforward consequence of
the fact that W is invariant under F,i.e.,F[W ] ⊆ W, so this falls into the scope of
Chapters 1 and 2. Notice that dim W =∞if N > 1, and dimW = 2ifN = 1.
© 2007 by Taylor & Francis Group, LLC