Flechtner F.M., Gruber Th., G?ntner A., Mandea M., Rothacher M., Sch?ne T., Wickert J. (Eds.) System Earth via Geodetic-Geophysical Space Techniques
Подождите немного. Документ загружается.


484 M. Mandea et al.
come from the remanent magnetization of the spacecraft, from electric currents in
the systems, and also from the directional anisotropy of the sensor. These extra fields
cannot be simply subtracted. Their influence on the field magnitude has to be deter-
mined by finding the projection of the disturbance on the total field vector. Only this
projection is considered in the correction. Since the external contributions are small
compared to the ambient field, the corrections can be accomplished conveniently
using a scalar product between the disturbance vector b and the ambient magnetic
field vector B
FGM
, measured by the FGM.
|B
OVM
|=B
m
−
b ·B
FGM
B
m
,(1)
where |B
OVM
| is the total intensity field corrected for disturbances and B
m
is the reading of the OVM. The disturbance vector b is the sum of several
contributions,
b = b
SC
+ b
aniso
+ b
stray
+ b
torq
.(2)
The remanent magnetic field of the spacecraft, b
SC
, has been determined in a
pre-flight system test. Since the OVM is mounted at the tip of a 4 m long boom, the
remaining effect is only of the order of 0.5 nT. Also the dependence of the OVM
reading on the direction of the field vector, b
aniso
, is rather small (< 0.3 nT). There
are some stray fields, b
stray
, generated by electric currents, e.g. in the solar panels
which make effects of less than 0.5 nT. Current readings from the housekeeping data
are also needed for this correction. Comparably large are the contributions from
the three orthogonal magneto-torquers, b
torq
, which are used for controlling the
spacecraft attitude. These fields reach amplitudes of more than 3 nT at the position
of the OVM. Fortunately, they can be predicted quite reliably when the currents
through the torquer coils are measured.
b
torq
=
⎛
⎝
q
1,1
q
1,2
q
1,3
q
2,1
q
2,2
q
2,3
q
3,1
q
3,2
q
3,3
⎞
⎠
⎛
⎝
I
x
I
y
I
z
⎞
⎠
(3)
Where I
x
, I
y
, I
z
are the currents through the three respective coils and q
n,m
are
the elements of the torquer correction matrix, which have to be determined in the
magnetic system test.
In step 4, corrections associated with perturbation proportional to the ambient
magnetic field are considered. For CHAMP, these are the permeability of the space-
craft and the cross-talk from the FGM onto the OVM. For considering these effects,
a somewhat different approach is needed. Indeed,
|B
OVM
|=B
m
− (dxB
2
x
+ dyB
2
y
+ dzB
2
z
)/B
m
(4)
where dx, dy, dz denote the modifications in the scaling factors in the vector
directions; B
x
, B
y
, B
z
are again the ambient field components as measured by the
The Earth’s Magnetic Field 485
FGM. The values of dx, dy and dz are for both effects, S/C permeability and FGM
cross-talk, of order 1 × 10
–5
. They have also been determined during the system
magnetic tests. Fortunately, all three components of the two contributions happen to
have similar amplitudes, but opposite signs. Therefore, the total disturbance caused
by multiplicative effects is largely cancelled.
After applying the described corrections to the OVM data, they are considered
Level 2 and transferred to the data center, ISDC. Based on the fairly small sizes of
the various correction terms described above one can conclude that the field mag-
nitudes provided in this Level 2 product are rather reliable. Finally, it is considered
that an absolute accuracy of better than 0.5 nT is reached.
2.3.2 Fluxgate Magnetometer Data Processing
The fluxgate magnetometer (FGM) measures the three components of the magnetic
field. These vector field measurements are performed at a rate of 50 Hz with a
resolution of 0.1 nT. This higher rate is justified by the significantly larger variabil-
ity of vector components compared to the fluctuations of the field magnitude. The
FGM is an analogue instrument; therefore its characteristics are expected to change
in response to environmental influences or with time. In order to ensure reliable
readings of the vector field components from a multi-year mission, the calibration
parameters have to be updated at regular intervals (for CHAMP this is done every
15 days). The in-flight calibration is based on a direct comparison between of the
FGM readings with the OVM Level 2 data. Details of the calibration approach are
given below.
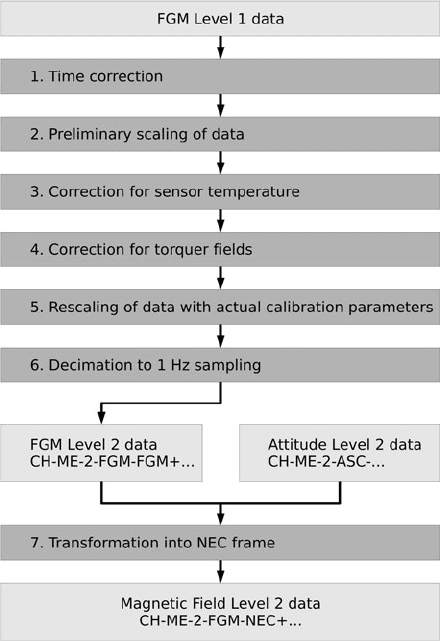
Figure 5 shows, in a similar way as Fig. 4, the main processing steps applied
to the FGM Level 1 data. It starts again with the proper dating of the readings
where the delay of the time stamp with regard to the exact epoch of measurement
is considered. In step 2 the raw data are converted to physical units with the help
of a preliminary set of parameters. The measurements are expected to have a bias
and need to be scaled. Firstly, the offset vector is subtracted from the FGM read-
ings, measured in engineering units. Thereafter, the results are scaled into nT. For
CHAMP, linear, quadratic and cubic terms are taken into account. As an example,
for the x component, one can write:
B
x0
= S
1x
(E
x
− O
x
) +S
2x
(E
x
− O
x
)
2
+ S
3x
(E
x
− O
x
)
3
(5)
where B
x0
is an estimation of the magnetic field in the x direction, S
1x
, S
2x
, S
3x
are
the scaling factors, E
x
are the FGM readings in engineering units, and O
x
is the offset
in the x direction. The non-linear corrections have been determined in the laboratory
before the launch. They are rather small and thus considered to be constant over the
mission. Finally, the deviations of the sensor elements from the orthogonality are
corrected:
B
1
= C ·B
0
(6)
486 M. Mandea et al.
Fig. 5 Schematic flow chart for the processing of the Fluxgate magnetometer data. For details of
the processing steps see the text
where C is the matrix correcting for the non-orthogonality. This matrix has the form
C =
⎛
⎝
1 cos (x,y) cox(x,z)
0 1 cos (y,z)
00 1
⎞
⎠
(7)
where the elements represent the cosine of the angle between respective sensor
elements.
Corrections of the environmental influences start with step 3. The sensor changes
its geometry with the ambient temperature. This has an influence on the scal-
ing factor. Other parameters, bias and sensor orientation, are not affected by the
temperature. In pre-flight tests the temperature coefficients have been determined.
The Earth’s Magnetic Field 487
They amount to about 30 ppm/K for all axes. This effect is corrected using the
temperature measurements at the sensor place.
During the step 4 the magnetic fields produced by the spacecraft are considered.
For the FGM, there is no need to correct for constant or slowly varying influences,
such as the remanent and induced magnetic field of the spacecraft: these effects are
accounted for in the FGM calibration parameters. However, disturbances varying
over short time have to be corrected directly. An example of that is the magnetic
field, B
torq
, caused by the t orquer coils.
B
torq
=
⎛
⎝
p
1,1
p
1,2
p
1,3
p
2,1
p
2,2
p
2,3
p
3,1
p
3,2
p
3,3
⎞
⎠
⎛
⎝
I
x
I
y
I
z
⎞
⎠
(8)
where p
n,m
are the elements of the torquer correction matrix for the FGM. As noted
before, these elements have been determined during the magnetic system tests. The
vector B
torq
has to be subtracted from the scaled FGM readings
FGM data corrected to this level are used for the scalar calibration. This cali-
bration against OVM data results in an improvement of the nine FGM processing
parameters (3 scale factors, 3 offset values, 3 angles between sensors). The fully
calibrated vector data, B
FGM
= B
1
+dB, are obtained in this way
dB =
⎛
⎝
dS
x
cos (dx,y) cos (dx,z)
0 dS
y
cos (dy,z)
00 dS
z
⎞
⎠
.(B
0
− dO)(9)
where all the quantities preceded by a d are the corrections with respect of the
original values and B
0
as it has been defined above.
So far, the processing scheme is applied to the full 50 Hz data set. Before con-
version to Level 2 products the vector data are re-sampled to 1 Hz, in order to make
them consistent with the scalar data (step 6). This re-sampling is not accomplished
by a simple average over the FGM reading within a second. A linear fit to the 100
values centered on the target time has been preferred. The new value i s then com-
puted from the derived function at the epoch of the related OVM reading. This
procedure is performed individually for all three components.
The new data set is then a Level 2 product accessible through the ISDC. These
fully calibrated vector data are useful for certain applications, but they are given in
the FGM sensor frame. For that reason during s tep 7 a transformation of the data
into the commonly used NEC frame is done. NEC i s a local Cartesian frame having
its origin at the position of the satellite. The three components point to geographic
north, east and to the centre of the Earth, respectively. A number of rotations have
to be performed for this coordinate transformation:
B
NEC
= R
(NEC←ITRF)
· R
(ITRF←ICRF)
· R
(ICRF←ASC)
· R
(ASC←FGM)
· B
FGM
(10)
488 M. Mandea et al.
The rotation angles from the FGM sensor system to the star camera (ASC) are
determined before launch. The rotation into the celestial frame, ICRF, is based on
the Level 2 attitude data. For the rotation from the ICRF into the Earth-fixed, ITRF
frame, the current Earth’s rotation parameters are used (as provided by the IERS ser-
vice), where the satellite position is taken from the precise orbit determination. The
final rotation into the NEC frame requires just the satellite position. Magnetic field
vector data in the NEC frame are the prime data source for all modeling efforts and
for various other applications. Therefore, this is the magnetic field Level 2 product
most frequently downloaded from the ISDC.
2.3.3 In-Flight Scalar Calibration
When processing the FGM magnetic field readings for a multi-year mission, in-
flight calibration plays an important role. For that reason we present the approach
used for CHAMP and the results obtained over its flight-time, in some more detail.
During the calibration process the readings of the OVM are used as a reference.
By comparing field magnitude values with those from FGM, the nine principle
parameters of the vector instrument can be determined in a non-linear inversion.
The basic idea is that the OVM and FGM should provide the same values for the
magnetic field strength, and any difference can be explained by an improvement of
the nine basic FGM parameters. These parameters are expected to be constant over
at least 1 day. In a linear approximation, it is required that
B = B
1
· dB = 2B
1
·
⎛
⎝
dS
x
cos (dx,y) cos (dx,z)
0 dS
y
cos (dy,z)
00 dS
z
⎞
⎠
.(B
0
− dO) (11)
where B is the difference in the field strength between OVM and FGM estimates.
Equation (11) represents a linear expression relating the processed OVM data to
the magnetic field components f rom the FGM through the nine unknown. In prac-
tice, a system of equations is set up making use of all 86,400 daily measurements,
from which the nine FGM parameters are determined by least squares.
With a day of data, the FGM parameters are determined. Averages over 15 days
are used in the FGM processing for the final scaling of the vector data. After this last
processing step the root mean square (rms) value of the difference between OVM
and FGM varies from 0.1 to 0.2 nT. This can be regarded as a verification of the
used calibration approach.
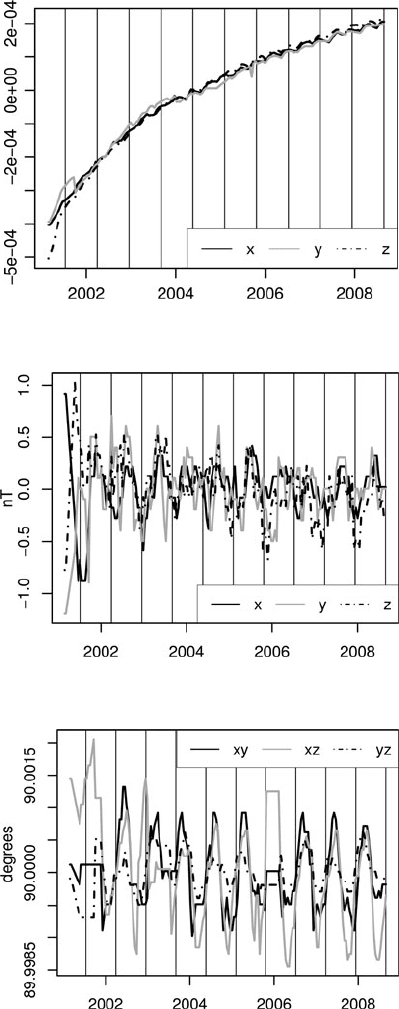
The CHAMP satellite has been in orbit for more than 8 years. It is thus inter-
esting to see how the prime FGM parameters have varied over the mission period.
In Figs. 6, 7, and 8 the long-term variations of the applied parameters are shown.
For the convenience of interpretation, vertical lines are drawn at times when the
ascending arc of the orbital plane coincides with the 6 o’clock local time sector,
and mean values are subtracted in order to allow a more direct comparison of the
The Earth’s Magnetic Field 489
Fig. 6 Temporal changes of
the Fluxgate magnetometer
scale factors. Mean values
have been subtracted. The
vertical lines indicate times
when the orbital plane is in
the 6 o’clock local time sector
Fig. 7 Temporal changes of
the Fluxgate magnetometer
offset values. The vertical
lines indicate times when the
orbital plane is in the 6
o’clock local time sector
Fig. 8 Temporal changes of
the angles between the
Fluxgate sensor axes. The
vertical lines indicate times
when the orbital plane is in
the 6 o’clock local time sector
490 M. Mandea et al.
Table 1 Mean values of the nine Fluxgate parameters, which have been substracted from the
curves plotted in the Figs. 6 and 7
b
plot
= b–b
offset
b
plot
bb
offset
bx
plot
bx 27.380
by
plot
by 20.695
bz
plot
bz 21.374
anlge
plot
= angle – angle
offset
anlge
plot
angle angle
offset
α
plot
α 0.02588
β
plot
β 0.060247
γ
plot
γ 0.038787
s
plot
= s–s
offset
s
plot
ss
offset
sx
plot
sx 1.002353
sy
plot
sy 1.003278
sz
plot
sz 1.003194
field components. The values subtracted are listed in Table 1. There are system-
atic differences between the variations of the scale factors and the other parameters.
The scale values show a monotonic increase over time. The trend is the same for all
three components and it can reasonably well be approximated by a logarithmic func-
tion. Over the mission lifetime, the scale factor has changed by 7 parts in 10.000,
corresponding to an error in magnetic field of some 40 nT.
The other parameters show no significant long-term trend, but exhibit periodic
variations in phase with the orbit local time. Amplitudes of the offset variations
(Fig. 7) are generally smaller than 0.5 nT. Regarding the sensor stability (Fig. 8)
variations are confined to angles of 0.001
◦
which correspond to 3.6 arcs. For these
six parameters the in-flight calibration confirms the high stability of the FGM instru-
ment on CHAMP. It should be noted here that the stability of the six parameters may
even be better than shown here. The synchronization of the deduced variations with
the orbital local time suggests that other, not corrected perturbations of the measure-
ments leak into these parameters. However, this does not affect the validity of the
Level 2 data.
2.4 Advanced Stellar Compass Data Processing
For the scientific use of the vector measurements the orientation of the components
has to be known with high precision. To achieve t his goal CHAMP is equipped
with a special optical bench, which houses the FGM and two star camera head units
(CHU). The purpose of the optical bench is to provide a mechanically stable con-
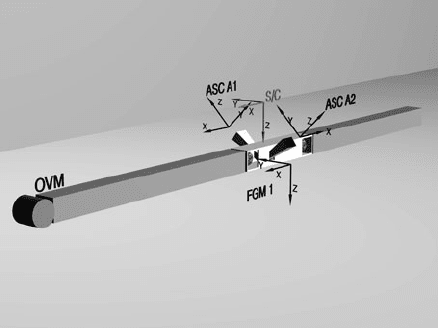
nection between magnetometer and star tracker. Figure 9 shows schematically the
arrangement of the instruments on the boom and the orientation of the various coor-
dinate systems. The viewing direction of the two cameras is separated by 102
◦
.
The Earth’s Magnetic Field 491
Fig. 9 Schematic drawing of
the CHAMP boom and its
instrument assembly. Also the
orientations of the relevant
coordinate systems referred to
in the text are shown
Therefore, they survey two completely different regions of the sky, and the informa-
tion provided by the two camera heads are combined in order to improve the attitude
determination.
The Advanced Stellar Compass (ASC) is a sophisticated instrument, performing
self-consistently the attitude determination on-board at a rate of 1 Hz. This includes
the correction for aberration due to the finite speed of the light. The basic data
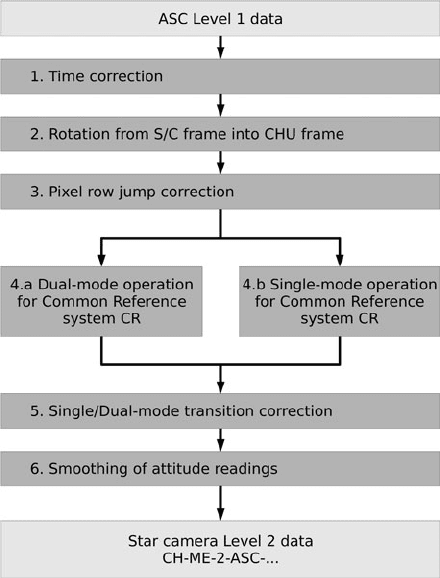
processing to be performed on ground is therefore quite straightforward. Figure 10
presents a schematic flow chart of the ASC data processing steps. It starts again with
the adjustment of the time stamp to the measurement time.
In step 2 the transmitted attitude readings are transformed back from the space-
craft frame into the CHU frame. Step 3 is required for removing artificial jumps in
the attitude readings. Due to some hardware problems at certain times the readout
of the CCD in the camera does not work properly. In those cases the first row of
pixels is skipped. As a result, the internal attitude determination algorithm provides
a biased output. Fortunately, the bias of about 85 arcsec is constant, and can be
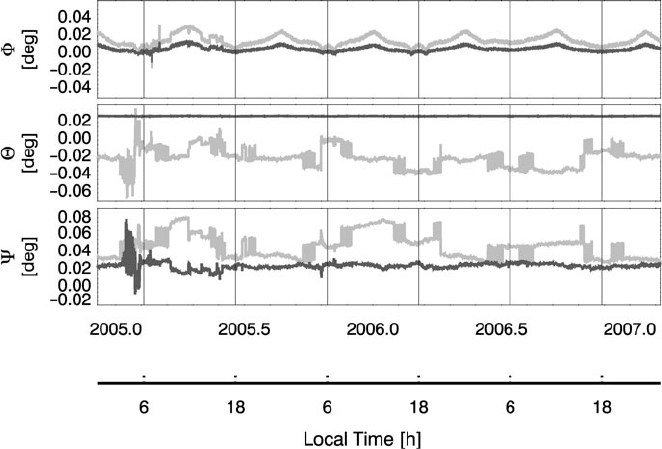
removed in the processing. The challenge is to identify the affected readings. An
example is given in Fig. 11. The angular differences between CHU1 and CHU2 are
plotted when both attitudes are given in the S/C frame. As expected, there are no
jumps in the rotation around the x axis (roll). In the two other directions, jumps are
evident. Four different states can exist, from both correct attitudes to both biased atti-
tudes. The angle variations after corrections of the attitude jumps are also shown.
Remaining differences between the two independent attitudes are much smaller,
except for the beginning of 2005. Shortly after Christmas 2004 a strong intergalac-
tic gamma burst (Mandea and Balasis, 2006), destroyed a number of CCD pixels.
Only after uploading a new dead-pixel map a reliable attitude determination has
again been possible.
Star trackers have a characteristical anisotropic direction accuracy. While one
can determine the two angles perpendicular to the viewing directions very precisely,
the uncertainty of the rotation angle about the bore-sight is larger by a factor of
492 M. Mandea et al.
Fig. 10 Schematic flow chart for the processing of the Advanced Stellar Compass data. For details
of the processing steps see the text
about 6. To overcome this limitation in step 4a the attitude readings of the two
star trackers are combined, whenever both provide reliable readings. In that case the
uncertainty in the rotation angles can be omitted. A common reference frame (CR) is
defined using exclusively the directions given by the bore-sight of the star cameras.
If these directions are for the camera 1 and 2, respectively, then the reference frame
is calculated by:
Z
CR
=−(Z
1
+ Z
2
)/|Z
1
+ Z
2
|
X
CR
=−(Z
1
× Z
2
)/|Z
1
× Z
2
|
Y
CR
= Z
CR
× X
CR
(12)
There are time-intervals, however, when one of the cameras is blinded. In that
case a pre-defined rotation is applied for obtaining the attitude in the CR frame from
the useable camera. Then the quality of the attitude is reduced due to the uncertainty
of the rotation angle. The attitude data are therefore affiliated with quality flags
showing on which camera the result is based on. As expected, the transition from
dual head to single head attitude readings is not always smooth. For that reason in
The Earth’s Magnetic Field 493
Fig. 11 Differences between attitudes derived from CHU1 and 2 (both in S/C frame) for 2005–
2007. The grey curve shows the situation before jump correction, and the black curve after
correction
step 5 a fitted linear trend is added to the single head values to ensure a smooth
continuous data series.
A further smoothing is performed in step 6. The CHAMP spacecraft, due to its
large mass, cannot change its attitude rapidly. For that reason, the attitude variations
are constrained, by applying a low-pass filter. After this processing the ASC Level
2 data are transferred to the ISDC.
2.5 Magnetic Field Data in NEC Frame
An extra demanding task is to rotate the magnetic field vector data into a geo-
physically well-defined frame, such as North-East-Center (NEC). Data from several
sources have to be considered for t his transformation. Instruments involved are the
OVM, FGM, ASC and GPS receiver. Only if the readings of all these instruments are
resampled to the same time, given in UTC, they can be combined and transformed.
A time difference of 10 ms can cause an error up to 0.6 nT. On CHAMP all measure-
ment cycles are synchronized by the second-pulse PPS (Precise Positioning Service)
of the GPS receiver, therefore the required timing accuracy of a measurement to a
few milliseconds can be achieved.
A remaining uncertainty of the data in NEC frame comes from the finite stability
of the optical bench. There is no direct way to check it in space. An indirect approach