Flechtner F.M., Gruber Th., G?ntner A., Mandea M., Rothacher M., Sch?ne T., Wickert J. (Eds.) System Earth via Geodetic-Geophysical Space Techniques
Подождите немного. Документ загружается.

452 G. Michalak and R. König
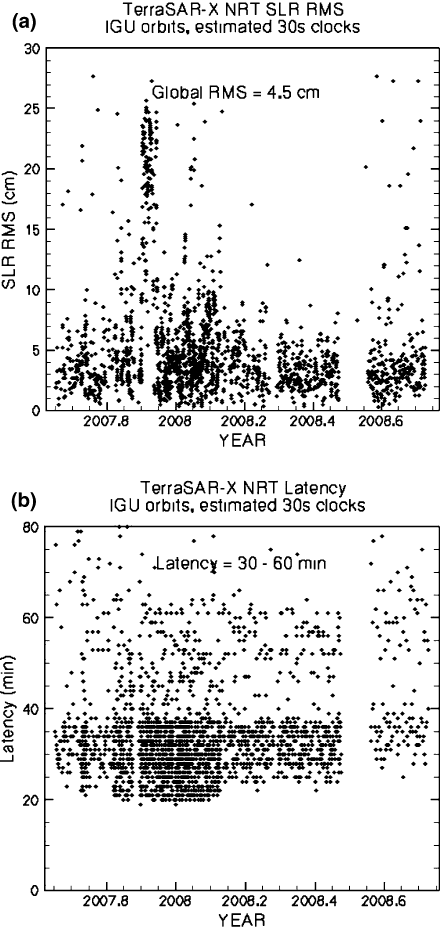
Fig. 8 (a) Accuracy TerraSAR-X NRT orbits generated by the CHAIN 3. (b) Latency of the
TerraSar-X NRT orbits generated by the CHAIN 3
Near-Real Time Satellite Orbit Determination for GPS Radio Occultation 453
of the dense 30s clocks is time consuming, the length of the hourly generated long
GPS arc was reduced from 24 to 12 h, the short arc remains of 3 h length. This
chain is a kind of mixture of the two above chains, generates LEO orbits with an
acceptable mean latency of 30 min but with the highest accuracy of 5–6 cm. For
TerraSAR-X the latency (90 min) is dictated mainly by the dump data delay (see
Table 1) but will be improved in the future once the data are dumped over the polar
receiving station Ny
´
Ålesund. This chain is active since February 2007. The accura-
cies and latencies of CHAMP, GRACE-A and TerraSAR-X orbits generated by this
chain are given in Figs. 6, 7, and 8.
3 Summary
Within the German “Geotechnologien NRT-RO” project, GFZ has developed a NRT
orbit processing system for GPS and LEO orbits to support NRT radio occultations.
The system generates NRT LEO orbits every 1.5 h with average position accura-
cies of 6–10 cm validated by SLR over whole arcs. For NRT occultation products
only last 2 h of arcs are used. The accuracy of these orbit parts is computed from
arc overlaps. The LEO orbits of lower accuracy (20 cm for position, 0.20 mm/s for
velocity) are generated with a latency of 13 min when using predicted IGU orbits
and clocks. More precise orbits (6–7 cm for position, 0.06 mm/s for velocity) are
generated with a latency of 30 min when using IGU predicted orbits but 30s clocks
being estimated. In all processing chains the orbit latency can assure the generation
of occultation products with average delay well below 3 h required for NWP sys-
tems. The NRT processing system is designed for easy extension to other LEOs
delivering NRT data, what was demonstrated by inclusion of the TerraSAR-X data
already 3 months after the launch of the satellite on June 15, 2007. The variety of
the approaches to the NRT orbits (three independent chains for each of the LEOs)
enhances the reliability of the system. The system is fully operational and automatic,
requires however non-negligible human activities to account for new unexpected
situations affecting the automatic processing.
Acknowledgments We thank the CHAMP, GRACE and TerraSAR-X teams for their great work
to guarantee the availability of GPS SST data. The described near-real time activities at GFZ are
supported by the German Ministry for Education and Research within the GEOTECHNOLOGIEN
programme (Research project NRT-RO/No. 1262) and also by GFZ.
References
König R, Michalak G, Neumayer K H, Schmidt R, Zhu S Y, Meixner H, Reigber C (2005) Recent
developments in CHAMP orbit determination at GFZ. In: Reigber C, Lühr H, Schwintzer P,
Wickert J (eds.), Earth Observation with CHAMP. Results from Three Years in Orbit, Springer,
Berlin.
Michalak G, Baustert G, König R, Reigber C (2003) CHAMP rapid science orbit determination –
status and future prospects. In: Reigber C, Lühr H, Schwintzer P (eds.), First CHAMP Mission
Results for Gravity, Magnetic and Atmospheric Studies, Springer, Berlin.
454 G. Michalak and R. König
Michalak G., Wickert J, König R, Rothacher M (2007) Precise satellite orbit determination for GPS
radio occultation in near-real time (NRT). European Geosciences Union General Assembly
2007 Vienna, Austria, 15–20 April 2007, Poster EGU2007-A-08740.
Wickert J, Michalak G, Schmidt T, Beyerle G, Cheng C Z, Healy S B, Heise S, Huang C Y,
Jakowski N, Köhler W, et al. (2009) GPS radio occultation: results from CHAMP, GRACE and
FORMOSAT-3/COSMIC. Terr. Atmos. Ocean. Sci. 20, doi: 10.3319/TAO.2007.12.26.01(F3C).

The Operational Processing System for GPS
Radio Occultation Data from CHAMP
and GRACE
Torsten Schmidt, Jens Wickert, and Grzegorz Michalak
1 Introduction
The GPS radio occultation (RO) technique has established as an excellent method
for global and continuous monitoring of the Earth’s atmosphere (Melbourne et al.,
1994; Anthes et al., 2008). During the last 2–3 years most of the weather service
centers worldwide have begun to assimilate RO data in their global and/or regional
weather models (Healy et al., 2007).
The use of analysis results obtained from RO data, as e.g. atmospheric excess
phases, bending angles or refractivity profiles, by weather prediction centers
requires an operational data processing system generating and delivering data prod-
ucts automatically within a certain time limit. Such a continuous Near-Real Time
(NRT) data processing system, the CHAMP (GRACE) Atmospheric Processor (in
the following the acronym CAP is used for both, the CHAMP and GRACE process-
ing system), is operating at GFZ Potsdam with RO data from the German CHAMP
and the US–German GRACE satellite missions (Reigber, 1998).
Because of different user demands with respect to the availability of RO prod-
ucts two data processing modes were introduced: a NRT mode and a standard mode.
Currently in the NRT processing mode the daily averaged time delay between occul-
tation measurements and availability of analysis results for the weather service
centres via the GTS (Global Telecommunication System) is less then2hforabout
75%andlessthan3hforabout 90% of all daily products. In the standard process-
ing mode quality checked profiles of atmospheric parameters are available with a
latency of about 2 days.
The realization of CAP follows the principle of separating the processing system
into a scientific and controlling part leading to an independent and more flexible
software development. The CAP is designed to be easily extendable by additional
scientific modules or input data. Thus, it also allows for an extension to other single-
or multi-satellite radio occultation missions, as e.g. COSMIC or TerraSAR-X.
T. Schmidt (B)
Helmholtz Centre Potsdam, GFZ German Research Centre for Geosciences,
Department 1: Geodesy and Remote Sensing, Telegrafenberg, 14473 Potsdam, Germany
e-mail: tschmidt@gfz-potsdam.de
455
F. Flechtner et al. (eds.), System Earth via Geodetic-Geophysical Space Techniques,
Advanced Technologies in Earth Sciences, DOI 10.1007/978-3-642-10228-8_40,
C
Springer-Verlag Berlin Heidelberg 2010
456 T. Schmidt et al.
This chapter is focused on the controlling components of the CAP that generate a
continuous data flow between the scientific software modules and the user. Further,
we concentrate on the description of the NRT part of the processing system.
2 Infrastructure and Input Data
The generation of RO products requires a complex infrastructure. It was devel-
oped with the start of RO measurements aboard CHAMP in 2001, and since then
maintained and extended for, e.g., GRACE (2002) and other satellite missions
(TerraSAR-X in 2007).
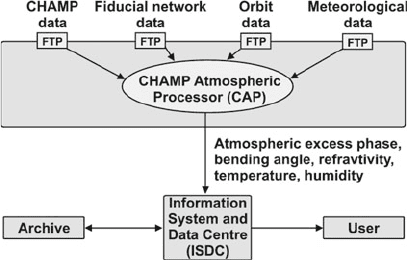
The main components of the infrastructure are (Fig. 1):
• the Black-Jack GPS receiver (provided by NASA/JPL) onboard CHAMP,
• three downlink stations receiving CHAMP data (Neustrelitz and Weilheim, both
located in Germany, and Ny-Aalesund in Spitsbergen, Norway) in cooperation
with DLR,
• the fiducial low latency and high rate GPS ground network operated in coopera-
tion between GFZ and JPL,
• an orbit processing facility for determination of NRT orbits for the GPS satellites
and CHAMP,
• the CHAMP/GRACE Atmospheric Processor generating CHAMP/GRACE radio
occultation data products, e.g., atmospheric excess phases, profiles of bending
angle, refractivity, temperature, and humidity (Wickert et al., 2001), and
• the CHAMP Information System and Data Center (ISDC) archiving and distribut-
ing CHAMP data and analysis results.
Fig. 1 Infrastructure and
input data for GPS radio
occultation data processing
from CHAMP
3 The CHAMP/GRACE Atmospheric Processor
The goal of the CAP is to coordinate the different data streams and to start the var-
ious scientific applications automatically when all i nput data for an application are
available. The CAP is a modular structured and dynamically configurable software
The Operational Processing System for GPS Radio Occultation Data 457
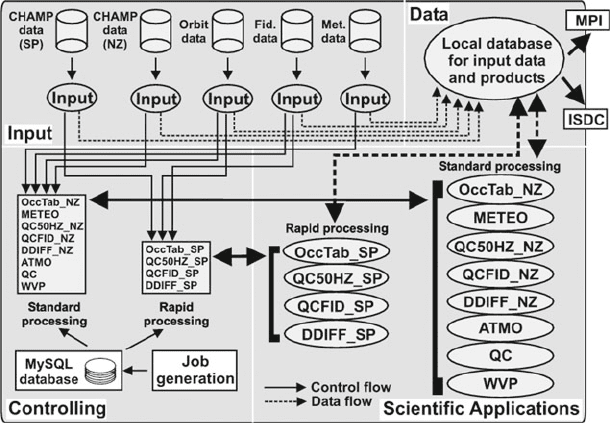
Fig. 2 Schematic view of the CHAMP atmospheric processor at GFZ Potsdam
package consisting of a scientific and controlling part (Fig. 2). Thescientific soft-
ware modules (e.g. DDIFF, ATMO) calculate the atmospheric excess phases and
vertical atmospheric profiles. The controlling components ensure the continuous
data flow of all input data through the scientific analysis modules and pro-
vide the interface for feeding the RO products into the data center (ISDC) or
directly to the German Weather Service (DWD) who puts the data to the Global
Telecommunication System (GTS) since July 2007.
CAP runs on multiple UltraSparc II/III processor machines and is a combination
of different subroutines and scripts written in C++, Fortran, IDL, Perl, and C-Shell.
4 Standard and NRT Processing
The processing of RO data at GFZ Potsdam is divided into two parts (Fig. 2):
• the standard processing using CHAMP/GRACE data via the dump s ta-
tions Neustrelitz and Weilheim (Germany) and Rapid Science GPS and
CHAMP/GRACE Orbits (RSO) (König et al., 2002),
• the NRT processing using CHAMP/GRACE data via the polar dump station at
Ny-Aalesund, Spitsbergen and NRT Science Orbits (Michalak et al., 2007).
These two modes are necessary due to demands on product availability. The
availability of RO data products, i.e., the time delay between measurement and
delivery of products to the data center or user, depends on two factors: (1) the
458 T. Schmidt et al.
moment at which all input data for the respective applications (Fig. 2) are avail-
able and (2) the duration that CAP needs to process the input data and generate
products. The NRT data user (e.g., DWD) require a data availability within a time
window of less t han 3 h.
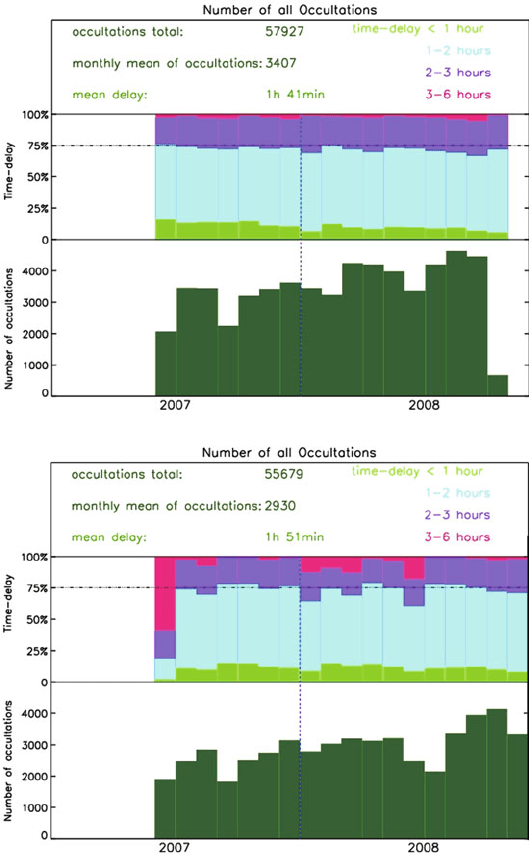
(a)
(b)
Fig. 3 Number of monthly CHAMP (a)andGRACE(b) RO data and time delay between mea-
surement and delivering of the data to the DWD (GTS) from the NRT processing since June 2007
The Operational Processing System for GPS Radio Occultation Data 459
The first point is fulfilled due to the installation of a polar dump station.
This enables a contact to CHAMP about every 90 min. Since 2006 the GPS
and CHAMP/GRACE satellite orbits are available at latest 30–40 min after the
according dump. These NRT orbits cover a3htimewindow.
The second point (duration of data processing) is uncritical, because the process-
ing of one dump with about 10–20 RO events takes less than 5 min.
Figure 3 shows the number of monthly CHAMP/GRACE RO data and the time
delay between measurement and delivering of the data to the DWD (GTS) from the
NRT processing mode since June 2007. At this time the continuous data transfer of
GPS RO products from GFZ to worldwide weather centers has started.
The averaged time delay between CHAMP or GRACE measurements and data
product delivery is less t han 2 h. For about 10–15% of the products a time delay less
than 1 h is reached (Fig. 3).
5 Summary
The CAP enables an operational data processing and the delivery of analysis results
to the data center or directly to the user. Since June 2007 (start of NRT product
delivery) more than 100,000 CHAMP and GRACE RO products, as bending angles
or temperature profiles have been generated (about 150 daily, as of January 2009).
Due to the modular structure CAP is suitable for easy extension to other single-
or multi-satellite RO experiments.
In the standard processing mode quality checked products (refractivity and tem-
perature profiles) are available with a latency of about 2 days. A near-polar receiving
station at Spitsbergen and a dump-oriented CHAMP/GRACE and GPS orbit produc-
tion cycle made it possible to implement a NRT processing at GFZ Potsdam for the
first time. Since mid-2007 GPS RO products with an averaged time delay of less
than 2 h between measurement and availability of the analysis results are generated
and transferred continuously.
Acknowledgments This study was carried out in the Geotechnologien program under the grant
of the German Federal Ministry of Education and Research.
References
Anthes RA, Bernhardt PA, Chen Y, Cucurull L, Dymond KF, Ector D, Healy SB, Ho SP, Hunt DC,
Kuo YH et al. (2008) The C OSMIC/FORMOSAT-3 mission: Early results. B ull. Amer. Meteor.
Soc. 89, 1–21.
Healy SB, Wickert J, Michalak G, Schmidt T, Beyerle G (2007) Combined forecast impact of
GRACE-A and CHAMP GPS radio occultation bending angle profiles. Atmos. Sci. Lett. 8,
43–50.
König R, Zhu SY, Reigber C, Neumayer KH, Meixner H, Galas R, Baustert G, Schwintzer P (2002)
CHAMP rapid orbit determination for GPS atmospheric limb sounding. Adv. Space Res. 30(2),
289–293.
460 T. Schmidt et al.
Melbourne WG, Davis ES, Hajj GA, Hardy KR, Kursinski ER, Meehan TK, Young LE (1994) The
application of spaceborne GPS to atmospheric limb sounding and global change monitoring,
JPL Publication, 94-18, Jet Propulsion Laboratory, Pasadena, California.
Michalak G, Wickert J, Koenig R, Rothacher M (2007) Precise satellite orbit determination for
GPS radio occultation in near-real time (NRT), EGU2007-A-08740 abstract.
Reigber C (1998) GPS Atmosphere sounding: An innovative approach for the recovery of
atmospheric parameters, HGF Strategy fund proposal, Potsdam, Germany.
Wickert J, Reigber C, Beyerle G, König R, Marquardt C, Schmidt T, Grunwaldt L, Galas R,
Meehan TK, Melbourne WG et al. (2001) Atmosphere sounding by GPS radio occultation:
First results from CHAMP. Geophys. R es. Lett. 28, 3263–3266.

Assimilation of CHAMP and GRACE-A
Radio Occultation Data in the GME Global
Meteorological Model of the German
Weather Service
Detlef Pingel, Andreas Rhodin, Werner Wergen, Mariella Tomassini,
Michael Gorbunov, and Jens Wickert
1 Introduction: Data Assimilation
Prior to a numerical weather forecast run, the state of the meteorological model has
to be updated using observational information. This operation is called the assimila-
tion step in the process of weather forecasting. Common observational data sources
include in-situ data such as radiosondes, weather station measurements, data from
aircrafts and buoys. In the meantime, satellite remote-sensing measurements play a
major role i n weather prediction. Most remote-sensing observations are radiances
of a given wavelength at nadir. Radio occultation data, however, are a relatively new
source of observational information. Quantities that describe an occultation process,
like bending angles of the individual rays or the refractivity field, depend directly on
the temperature and the humidity along the ray’s path. Therefore, radio occultations
can be assimilated in order to include additional information on temperature and
humidity into the model. They have been proven to be a valuable source of infor-
mation in atmospheric research and weather prediction (Wickert et al., 2009; Healy
et al., 2007b).
The information of radio occultations about the earth’s atmosphere is com-
plementary to radiance observations in several senses: whereas temperature and
humidity retrievals derived from radiances have a relatively low vertical resolu-
tion, the r adio occultation observations are sensitive to vertical structures on a much
smaller scale. Unlike radio occultation, radiance measurements generally fail in
cloudy areas (McNally, 2002). Another beneficial property is the lack of fundamen-
tal biases, which is an advantage when taking into account the elaborate procedure
of radiometer calibration, and the nearly uniform global coverage.
At the German weather service, the assimilation of radio occultation data is per-
formed by the three-dimensional variational (3D-Var) assimilation method (Daley
and Barker, 2000), which was recently introduced as the operational global assimila-
tion scheme. The assimilation of observational data is done in a statistically optimal
D. Pingel (B)
Deutscher Wetterdienst, DWD, Offenbach, Germany
e-mail: detlef.pingel@dwd.de
461
F. Flechtner et al. (eds.), System Earth via Geodetic-Geophysical Space Techniques,
Advanced Technologies in Earth Sciences, DOI 10.1007/978-3-642-10228-8_41,
C
Springer-Verlag Berlin Heidelberg 2010