Eschrig H. Topology and Geometry for Physics
Подождите немного. Документ загружается.

holds, and accordingly for more items. Equations 5.7 and 5.8 provide together a
homomorphism from the Abelian group of domains of oriented manifolds into the
Abelian group of integrals over domains of a fixed form x: One even may extend
those groups and the homomorphism to real vector spaces by setting
Z
k
1
U
1
þk
2
U
2
x ¼ k
1
Z
U
1
x þ k
2
Z
U
2
x; k
1
; k
2
2 R: ð5:9Þ
If for instance domains and integrals have a physical meaning one may think of
probability distributions over the integrals corresponding to probability distribu-
tions over domains.
Now, let U ¼fx j0 x
i
1; i ¼ 1; ...; ng2R
n
; and let w : R
n
! R
m
; m n;
be a regular embedding of a neighborhood of U 2 R
n
into the Euclidean space R
m
of possibly higher dimension. Let x be any n-form (not necessarily positive) on a
neighborhood of wðUÞ in R
m
: Recall, that as an embedding w is smooth and
injective and w
x
is injective at every point x 2 U; that is, the Jacobi matrix has
rank n (cf. p. 75). One defines now the left hand side of (5.6) as an integral over an
embedded n-dimensional manifold in R
m
; m n; by the right hand side which is
an integral of an n-form over the coordinate cube U in R
n
:
Let n ¼ 1 and x ¼
P
m
i¼1
x
i
ðyÞdy
i
a 1-form on an open subset of R
m
containing
wðUÞ where U is the unit interval of R and wðUÞ is a parametrized curve y ¼ wðxÞ
in R
m
of finite length with the curve parameter x 2 U: Then, (5.6) reads
Z
wðUÞ
x ¼
Z
wðUÞ
X
m
i¼1
x
i
ðyÞdy
i
¼
Z
1
0
X
m
i¼1
x
i
ðyðxÞÞ
dw
i
dx
dx:
Replacing dx by dx and integrating from x ¼ 1 to x ¼ 0 reverses also the sign of
dw
i
=dx and hence the sign of the value of the integral. This is the integral over
wðUÞ: Next, fix the point y
0
¼ wð0Þ and let s be the arc length from y
0
along the
curve y ¼ wðxÞ: This yields a one–one function x ¼ xðsÞ with xðSÞ¼1 where S is
the total length of the curve from y
0
¼ wð0Þ to y
1
¼ wð1Þ: Then,
Z
wðUÞ
x ¼
Z
S
0
X
m
i¼1
x
i
ðyðxðsÞÞÞ
dw
i
dx
dx
ds
ds ¼
Z
S
0
X
m
i¼1
x
i
ðyðsÞÞ
dw
i
ds
ds;
and in this sense the integral is independent of the parametrization of the curve.
Now, assume that there is a real function uðyÞ on R
m
; which can be taken as a
0-form, and that x ¼ du ¼
P
i
ðou=oy
i
Þdy
i
: Then,
Z
wðUÞ
x ¼ uðy
1
Þuðy
0
Þ; x ¼ du;
5.1 Prelude in Euclidean Space 117
which is the Fundamental Theorem of Calculus for the case of a parametrized
curve. Moreover, since x may be considered as a linear mapping of tangent vector
fields to scalar functions, the motion of a point in time t along the curve from y
0
at
t ¼ 0 to y
1
at t ¼ T may be considered,
Z
wðUÞ
x ¼
Z
T
0
X
m
i¼1
x
i
ðyðtÞÞ
dw
i
dt
dt;
where now x may be a force field and dw=dt a velocity field, and the integral is the
work performed on the point. Again, if the force field x has a potential u, then
the work depends only on the potential values at the boundary points y
0
and y
1
of
the path.
Next, let n ¼ 2 and x ¼
P
1 i
1
\i
2
m
x
i
1
i
2
ðyÞdy
i
1
^ dy
i
2
a 2-form on an open
subset of R
m
containing wðUÞ where U is the unit square of R
2
and wðUÞ is a
parametrized surface y ¼ wðx
1
; x
2
Þ in R
m
of finite area with parameters
x
1
; x
2
; ðx
1
; x
2
Þ2U: Then, (5.6) reads
Z
wðUÞ
x ¼
Z
wðUÞ
X
1 i
1
\i
2
m
x
i
1
i
2
ðyÞdy
i
1
^ dy
i
2
¼
Z
1
0
Z
1
0
X
1 i
1
\i
2
m
x
i
1
i
2
ðyðxÞÞ
X
2
j
1
; j
2
¼1
ow
i
1
ox
j
1
dx
j
1
^
ow
i
2
ox
j
2
dx
j
2
¼
Z
1
0
Z
1
0
X
1 i
1
\i
2
m
x
i
1
i
2
ðyðxÞÞ
ow
i
1
ox
1
ow
i
2
ox
2
ow
i
1
ox
2
ow
i
2
ox
1
dx
1
^ dx
2
¼
Z
1
0
Z
1
0
X
m
i
1
;i
2
¼1
x
i
1
i
2
ðyðxÞÞ
ow
i
1
ox
1
ow
i
2
ox
2
dx
1
dx
2
:
In the last equality it was used that x
i
1
i
2
is an alternating tensor.
Let u ¼
P
m
i¼1
u
i
ðyÞdy
i
be a 1-form and x ¼ du, that is (cf. (4.42))
x ¼
X
m
i¼1
du
i
^ dy
i
¼
X
m
i
1
;i
2
¼1
ou
i
2
oy
i
1
dy
i
1
^ dy
i
2
¼
X
1 i
1
\i
2
m
ou
i
2
oy
i
1
ou
i
1
oy
i
2
dy
i
1
^ dy
i
2
:
Inserting this expression in parentheses for x
i
1
i
2
into the last line of the integral of
the previous paragraph and using the chain rule ou
i
=ox
j
¼
P
k
ðou
i
=oy
k
Þðow
k
=ox
j
Þ
one finds
118 5 Integration, Homology and Cohomology

Z
wðUÞ
x ¼
Z
1
0
Z
1
0
X
m
i¼1
ou
i
ox
1
ow
i
ox
2
ow
i
ox
1
ou
i
ox
2
dx
1
dx
2
¼
Z
1
0
X
m
i¼1
u
i
ð1; x
2
Þu
i
ð0; x
2
Þ
ow
i
ox
2
dx
2
u
i
ðx
1
; 1Þu
i
ðx
1
; 0Þ
ow
i
ox
1
dx
1
¼
Z
y
10
!y
11
u
Z
y
00
!y
01
u
Z
y
01
!y
11
u þ
Z
y
00
!y
10
u;
where in the second equation integrations per part over x
1
in the first item and over
x
2
in the second item were done. The terms with the second derivative of w
i
cancel. For the sake of simpler writing uðxÞ stands for uðyðxÞÞ: If then y
ij
denotes
wði; jÞ; i; j ¼ 0; 1 (see Fig. 5.1), then the four terms of the integral are in fact
curvilinear integrations along the boundaries of wðUÞ as depicted in Fig. 5.1.By
observing (5.7) they constitute an integral around wðUÞ with consecutive orien-
tation in the mathematical positive sense with regard to the x
1
; x
2
-plane. Inter-
changing x
1
with x
2
would reverse this positive sense and also the sign of the
integral.
In general, the integral over an n-dimensional regularly embedded manifold in
the R
m
; m n; as described above of an n-form x is obtained as
Z
wðUÞ
x ¼
Z
1
0
Z
1
0
X
1 i
1
\\i
n
m
x
i
1
i
n
ðyðxÞÞ det
ow
i
j
ox
k
dx
1
^^dx
n
¼
Z
1
0
Z
1
0
X
m
i
1
;...;i
n
¼1
x
i
1
i
n
ðyðxÞÞ
ow
i
1
ox
1
ow
i
n
ox
n
dx
1
dx
n
: ð5:10Þ
What was above considered for n ¼ 1; 2,ifx ¼ du,isStokes’ theorem for the
case of a coordinate n-cube of the R
n
;
Fig. 5.1 The image wðUÞ of
the unit square U: For the
notation of the corners see
text
5.1 Prelude in Euclidean Space 119
Z
wðUÞ
du ¼
Z
owðUÞ
u; ð5:11Þ
where owðUÞ means the boundary of wðUÞ; oriented in a way in general specified
later. The boundary of a curve consists of its end points oriented outward, if the
curve is not closed (otherwise it has no boundary). To treat the Fundamental
Theorem of Calculus as the special case of Stokes’ theorem for n ¼ 1, the integral
over a point of a 0-form is defined as the function value of the 0-form at that point,
provided with an appropriate sign for the orientation of that end point. For n [1
the proof goes along the same line as for n ¼ 1: The orientations of the faces are
obtained from the sign factors of (4.42) in combination with the integrations per
part. Since any n-dimensional domain can be approximated by small n-cubes, and
since cubes which touch each other by a face have this face with opposite
orientation, (5.8) shows that all the integrals over inner faces of the covering of the
domain by cubes cancel and only those of surface faces survive. Instead of cubes
less regular polyhedra can be used. This makes it evident that Stokes’ theorem
does not only hold for cubes but for any shape of domains. This will be worked out
in detail in the following sections.
As an example consider m ¼ 3 and the n-forms x
n
; n ¼ 0; 1; 2; 3 on R
3
: Let
x
n
¼ dx
n1
; n ¼ 1; 2; 3; in particular (cf. (4.42)),
x
1
¼
X
3
i¼1
ox
0
oy
i
dy
i
¼ðgrad x
0
Þdy;
x
2
¼
X
1 i
1
;i
2
3
ox
1
i
2
oy
i
1
ox
1
i
1
oy
i
2
dy
i
1
^ dy
i
2
¼ðrot x
1
ÞdS;
dS
i
¼
1
2!
X
3
i; j;k¼1
d
123
ijk
dy
j
^ dy
k
;
x
3
¼
ox
2
23
oy
1
ox
2
13
oy
2
þ
ox
2
12
oy
3
dy
1
^ dy
2
^ dy
3
¼ðdiv XÞs;
X
i
¼
1
2!
X
3
i; j;k¼1
d
ijk
123
x
2
jk
:
Stokes’ theorem reads in these cases
Z
U
ðgrad x
0
Þdy ¼
Z
oU
x
0
¼ x
0
ðy
1
Þx
0
ðy
0
Þ;
Z
U
ðrot x
1
ÞdS ¼
Z
oU
x
1
dy;
Z
U
ðdiv XÞs ¼
Z
oU
x dS:
120 5 Integration, Homology and Cohomology
The first case is the classical Fundamental Theorem of Analysis, the second case is
the classical Stokes theorem, and the third case is Gauss’ theorem.
Differential forms are the equivalents to alternating covariant tensors. Hence
they have a geometrical meaning independent of coordinate systems. The orien-
tation of an oriented manifold may be changed by a mapping, in local coordinates
expressed as ðy
1
; y
2
; ...; y
n
Þ!ðy
1
; y
2
; ...; y
n
Þ: Likewise, the orientation of R
n
for odd n changes by inflection y !y of the space coordinates. Hence, in an
odd-dimensional space, tensors of odd degree change sign of their tensor com-
ponents in an inflection of spatial coordinates and tensors of even degree do not.
Additionally, pseudo-tensors are introduced with reversed sign-change behavior
compared to tensors with respect to a change of orientation of space. If the above
considered n-forms x
n
are tensor equivalents, then obviously rot x
1
; dS and x are
pseudo-vectors and div X and s are pseudo-scalars. The other quantities are tensors
(including vectors and scalars). Alternatively, the x
n
may be understood as
pseudo-forms (pseudo-tensor equivalents), and then the roles of tensors and
pseudo-tensors in these relations are reversed. One easily checks that all the above
relations remain valid in this case. (Orientation and pseudo-character have only a
relative meaning.)
In the above examples in R
3
; a 2-form was related to a pseudo-vector rot x
1
and
a 3-form to a pseudo-scalar div X: This has a generalization to any dimension. The
Euclidean space R
m
is an inner product space with the standard inner product
ða jbÞ¼
P
m
i¼1
a
i
b
i
; if a
i
and b
i
are the components of the vectors a and b with
respect to an orthonormal basis ff
1
; ...; f
m
g; ðf
i
jf
j
Þ¼d
ij
: This inner product may
be extended to an inner product of the exterior algebra KðR
m
Þ by putting
ða
1
^^a
n
jb
1
^^b
n
Þ¼detðða
i
jb
j
ÞÞ; n m; ð5:12Þ
putting K
n
ðR
m
Þ and K
n
0
ðR
m
Þ orthogonal to each other for n 6¼ n
0
, taking the
ordinary product of numbers in K
0
ðR
m
Þ; and finally extending by bilinearity to
all KðR
m
Þ: Note that in case of an inner product a bilinear form on the direct
product of the space with itself is meant, not with its dual which may be a different
space. The latter case is more general and was considered in (4.20). Nevertheless,
as in (4.22),
ðf
i
1
^^ f
i
n
jf
j
1
^^ f
j
n
Þ¼d
i
1
i
n
j
1
j
n
; ð5:13Þ
where the right hand side is 1,0,or1.
W. V. D. Hodge introduced as the anticipated generalization of the above
situation the star operator or Hodge operator : K
n
ðR
m
Þ!K
mn
ðR
m
Þ defined
as a linear operator by
ð1Þ¼f
1
^^f
m
; ðf
1
^^f
m
Þ¼1;
ðf
i
1
^^ f
i
n
Þ¼d
i
1
i
m
1m
ðf
i
nþ1
^^ f
i
m
Þ; all 1 i
k
m distinct;
ð5:14Þ
5.1 Prelude in Euclidean Space 121
and extended by linearity to arbitrary exterior forms. Note that an order of the
orthonormal basis vectors f
i
is to be fixed to define the positive orientation of R
m
:
Changing the orientation of R
m
; for instance by replacing f
1
!f
1
; introduces a
minus sign in the right hand side of all three defining relations (5.14). In either
case it immediately follows that
¼ d
i
1
i
m
1m
d
i
nþ1
i
m
i
1
i
n
1m
¼ð1Þ
nðmnÞ
on base forms, if all numbers i
k
are distinct. (The sign is just the sign of the
permutation from the superscripts of the first d-factor into those of the second
because for an equal order d
2
¼ 1 would result.) Since the right hand side is a
constant sign for each n, the result is valid in general for the application of to an
n-form:
¼ ð1Þ
nðmnÞ
; ð5:15Þ
that is, up to a possible sign the Hodge operator is its own inverse. Also, since
K
n
ðR
m
Þ and K
mn
ðR
m
Þ have the same dimension, from the definition (5.14)it
follows that is an isomorphism between these vector spaces.
On the basis of (5.13) one easily checks for two n-forms x and r
ðxjrÞ¼ðx ^rÞ¼ðr ^xÞ: ð5:16Þ
Since r is an n-form, r is an ðm nÞ-form and x ^r is an m-form which is
equivalent to the number ðx jrÞ: Let u 2 K
l
ðR
m
Þ; r 2 K
nþl
ðR
m
Þ and x 2 K
n
ðR
m
Þ:
Then (cf. (4.30) on p. 105), ði
u
r jxÞ¼ðr jL
u
xÞ¼ðr ju ^ xÞ: Application of the
second variant (5.16) yields ðx ^ði
u
rÞÞ ¼ ðu ^x ^rÞ¼ð1Þ
ln
ðx ^u ^
rÞ for any x 2 K
n
ðR
m
Þ: Hence, since is an isomorphism, ði
u
rÞ¼ð1Þ
ln
u ^
r: With (5.15), one more application of to this result yields
i
u
r ¼ð1Þ
nðmnlÞ
ðu ^ðrÞÞ; r 2 K
nþl
ðR
m
Þ; u 2 K
l
ðR
m
Þ; n þ l m:
The Hodge operator is mainly used to extend the Laplacian to manifolds
(Sect. 5.9, see also Sect. 9.6).
5.2 Chains of Simplices
In order to analyze the boundary operation in a more general context, instead of
coordinate cubes simplices as the simplest polyhedra in R
n
are considered and
their images in continuous or smooth mappings into manifolds, which are called
singular simplices.
Let ðv
0
; ...; v
r
Þ be r þ 1 linear independent vectors of the R
n
; n [ r: The set
S
r
ðv
0
; ...; v
r
Þ¼fx ¼ k
0
v
0
þþk
r
v
r
jk
i
0; k
0
þþk
r
¼ 1gð5:17Þ
122 5 Integration, Homology and Cohomology
of points of the R
n
is an r-dimensional simplex, in short an r-simplex with vertices
v
i
: A 0-simplex is a point, a 1-simplex is a line segment, a 2-simplex is a triangle, a
3-simplex is a tetrahedron, higher dimensions are considered by analogy. For later
use, an r-simplex for any r\0 is the empty set. It is clear that
D
r
¼fx ¼ðk
1
; ...; k
r
Þjk
i
0; k
1
þþk
r
1gð5:18Þ
is an r-simplex (with its vertices the origin and the first r orthonormal base vectors
of the R
n
) and that it is homeomorphic to any r-simplex S
r
ðv
0
; ...; v
r
Þ. D
r
is called
the standard r-simplex. It is understood as oriented by the r-form dk
1
^^dk
r
:
An r-simplex has r þ 1 faces, each of which is an ðr 1Þ-simplex. The faces of
S
r
ðv
0
; ...; v
r
Þ are S
r1
ðv
0
; ...; v
i1
; v
iþ1
; ...; v
r
Þ; i ¼ 0; ...; r. The faces of an
r-simplex are empty for r 0, a 1-simplex has two 0-simplices (points) as faces, a
2-simplex (triangle) has three 1-simplices (legs) as faces, a 3-simplex (tetrahe-
dron) has four 2-simplices (triangles) as faces, and so on. The oriented boundary
of a simplex is defined as
oS
r
ðv
0
; ...; v
r
Þ¼
X
r
i¼0
ð1Þ
i
S
r1
ðv
0
; ...; v
i1
; v
iþ1
; ...; v
r
Þ: ð5:19Þ
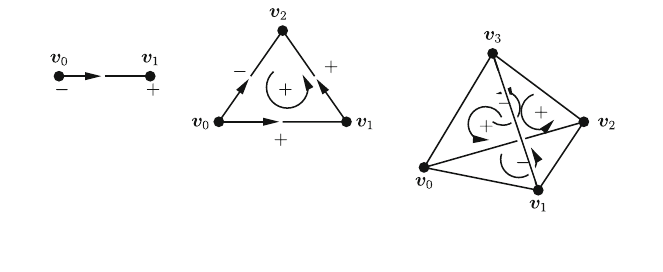
See Fig. 5.2 where oS
1
ðv
0
; v
1
Þ¼þS
0
ðv
1
ÞS
0
ðv
0
Þ; oS
2
ðv
0
; v
1
; v
2
Þ¼þS
1
ðv
1
; v
2
Þ
S
1
ðv
0
; v
2
ÞþS
1
ðv
0
; v
1
Þ; and the corresponding expression (5.19) for r ¼ 3 is
visualized.
Suppose an orientation of S
r
ðv
0
; ...; v
r
Þ has been fixed. As previously in (5.7),
the same simplex with the opposite orientation is denoted by S
r
ðv
0
; ...; v
r
Þ:
Obviously,
oðS
r
ðv
0
; ...; v
r
ÞÞ ¼ oS
r
ðv
0
; ...; v
r
Þ: ð5:20Þ
Moreover, like domains in (5.8), simplices may be added in which case the sums
can be understood to be unions of disjoint sets. In this sense, faces of dimension
less than r 1 are counted several times in (5.19). This will not be a problem in
the following. (In R
r1
a set of dimension less than r 1 has zero measure and
Fig. 5.2 Oriented boundaries of simplices. The þ and signs are those of (5.19), the arrows
indicate the orientation of the faces as simplices entering (5.19)
5.2 Chains of Simplices 123
does not change integrals.) Now, let S
r1
i
¼ S
r1
ðv
0
; ...; v
i1
; v
iþ1
; ...; v
r
Þ and
S
r2
ij
¼ S
r2
ðv
0
; ...; v
i1
; v
iþ1
; ...; v
j1
; v
jþ1
; ...; v
r
Þ; j [ i: Then,
ooS
r
ðv
0
; ...; v
r
Þ¼
X
j\i
ð1Þ
iþj
S
r2
ji
þ
X
i\j
ð1Þ
jþi1
S
r2
ij
¼ £ : ð5:21Þ
For r [ 1, the boundary of a simplex is closed and hence its boundary is empty.
For r 1; S
r2
is by definition empty anyhow.
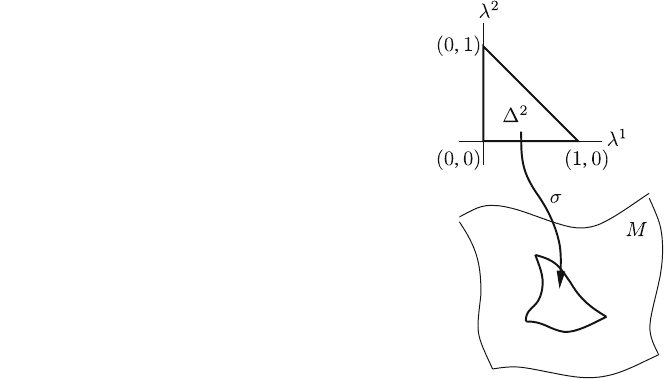
Let M be any manifold. A continuous (smooth) singular r-simplex r in M is a
continuous (smooth) mapping (of an open neighborhood in R
r
) of the standard
r-simplex D
r
into M (Fig. 5.3). M is supposed to be smooth in case of a smooth
singular r-simplex. For r\0; r is the empty mapping from the empty set into the
empty set. In order to define the boundary operation for r, first a mapping
k
r1
i
: D
r1
! D
r
; i ¼ 0; ...; r,ofD
r1
onto the faces of D
r
must be fixed. (Since
D
r
has no faces for r 0,nok
r1
i
for r 0 is needed.) For r ¼ 1, that is D
0
¼f0g
and D
1
¼½0; 1; k
0
0
ð0Þ¼1 and k
0
1
ð0Þ¼0: For r [ 1 one finds
k
r1
0
ðk
1
; ...; k
r1
Þ¼ 1
X
r1
j¼1
k
j
!
; k
1
; ...; k
r1
!
;
k
r1
i
ðk
1
; ...; k
r1
Þ¼ðk
1
; ...; k
i1
; 0; k
i
; ...; k
r1
Þ; i ¼ 1; ...; r:
ð5:22Þ
k
r1
0
ðD
r1
Þ is the face of D
r
opposite to the origin, and k
r1
i
ðD
r1
Þ are the faces
with k
i
¼ 0 in D
r
(and k
j
of D
r1
is becoming k
jþ1
of D
r
for j i).
Like it was done in the last section for domains of integration, formally linear
combinations of singular simplices with integer coefficients may be introduced and
usefully exploited. An r-chain of singular r-simplices r
l
in M is a finite linear
Fig. 5.3 A singular
2-simplex
124 5 Integration, Homology and Cohomology
combination c ¼
P
l
k
l
r
l
; k
l
2 Z: The set of r-chains forms the free Abelian group
generated by the set of all singular r-simplices. It can also be considered as a
Z-module. However, it turns out to be useful to allow for a field K instead of the
ring K ¼ Z of integers. Most important besides K ¼ Z are K ¼ R and K ¼ F
2
;
the field of integers modulo 2: F
2
¼f0; 1g; 0 0 ¼ 0; 0 1 ¼ 1; 1 1 ¼ 0; 0
0 ¼ 0 1 ¼ 0; 1 1 ¼ 1: With a field K (R or F
2
), the r-chains form a vector space.
The module or vector space over K of all r-chains in M is denoted as
0
C
r
ðM; KÞ¼ c ¼
X
l
k
l
r
l
k
l
2 K; r
l
continuous singular r-simplices in Mjg;
(
1
C
r
ðM; KÞ¼ c ¼
X
l
k
l
r
l
k
l
2 K; r
l
smooth singular r-simplices in M
jg
(
:
ð5:23Þ
Since for every non-trivial manifold M there is an infinite set of distinct singular
simplices r, both spaces
ð0;1Þ
C
r
ðM; KÞ are in general infinite-dimensional for r 0
with the distinct singular simplices forming a base. For r\0, there is no base
element, and hence
ð0;1Þ
C
r
ðM; KÞ¼f0g for r\0: ð5:24Þ
Later, the direct sum of these spaces will be treated as a grated (by r) module
(vector space).
Now, the boundary operation may be defined as
o or o
r
:
ð0;1Þ
C
r
ðM; KÞ!
ð0;1Þ
C
r1
ðM; KÞ;
oc ¼ o
X
l
k
l
r
l
!
¼
X
l
k
l
or
l
; o r ¼
X
r
i¼0
ð1Þ
i
r k
r1
i
:
ð5:25Þ
If it is necessary to indicate the dimension r of the chain to which the boundary
operator is applied, the notation o
r
will be used. The boundary of a chain is defined
as the corresponding chain of boundaries of the singular simplices, and the
boundary of a singular simplex is a chain (with integer coefficients 1) formed by
first mapping by k
r1
i
the standard ðr 1Þ-simplex D
r1
onto the ith face of the
standard r-simplex D
r
, then mapping by r this face of D
r
into M, and finally
linearly combining those mappings.
The standard r-simplex D
r
is a special case of an r-simplex S
r
and hence (5.21)
holds for it. It is then obvious that
o o ¼ 0 ð5:26Þ
holds on every r-chain.
Let M be a smooth n-dimensional manifold and let the image of the r-chain c of
smooth singular simplices be part of an open set in the topology of M on which an
5.2 Chains of Simplices 125
r-form x is defined, r n: By the singular r-simplex r; x may be pulled back
to D
r
: In a coordinate neighborhood of x ¼ rðxÞ2M; x 2 D
r
; that is, r ¼
ðr
1
ðxÞ; ...; r
n
ðxÞÞ; x may be given as x ¼
P
1\i
1
\\i
r
\n
x
i
1
i
r
ðxÞdx
i
1
^^
dx
i
r
: Then, with the orthonormal base in R
r
3 D
r
and the corresponding coordi-
nates k
i
; r
ðxÞ may be given as r
ðxÞ¼
P
1\i
1
\\i
r
\n
x
i
1
i
r
ðrðxÞÞ
P
j
1
;...;
j
r
ðor
i
1
=ok
j
1
Þðor
i
r
=ok
j
r
Þdk
j
1
^^dk
j
r
¼
P
1\i
1
\\i
r
\n
x
i
1
i
r
ðrðxÞÞDðr
i
1
; ...; r
i
r
Þ=
Dðk
1
; ...; k
r
Þdk
1
^^dk
r
(cf. (5.2)). The integral of the r-form x over the
image of the singular r-simplex rðD
r
Þ in M may now be defined as the ordinary
R
r
-integral of the pull-back r
ðxÞ over D
r
:
Z
r
x ¼
Z
D
r
r
ðxÞ for r 1;
Z
r
x ¼ xðrð0ÞÞ for r ¼ 0: ð5:27Þ
The integral over an r-chain c ¼
P
l
k
l
r
l
is defined as
Z
c
x ¼
X
l
k
l
Z
r
l
x: ð5:28Þ
Now, Stokes’ theorem for r-chains,
Z
oc
x ¼
Z
c
dx; ð5:29Þ
can be proved in the general r-dimensional case, where it obviously suffices to
prove it for a smooth singular r-simplex. The proof is technical but straightforward
with the above developed tools. It can be left as an exercise.
Stokes’ theorem for r-chains is the key to the deepest interrelations between
topology, algebra and analysis, the investigation of which in the middle of 20th
century, but proposed mainly by Poincaré at its beginning, was initiated by de
Rham’s theorem (Sect. 5.4).
In the above considerations, r must at least be of class C
1
ðR
r
Þ in order that
x can be pulled back. For x itself it would suffice for the integral to exist that
it is a continuous r-form. However, in Stokes’ theorem x must also be C
1
: In
most applications both r and x may be assumed smooth. Note that in this
section, r was not assumed to be bijective; for that reason the simplices r were
called singular. For instance, r might be constant: rðD
r
Þ¼fxg; x 2 M: In this
case the pull back of x is the constant r-form equal to its value at x and the
integral is the volume jD
r
j¼1=r! of D
r
times this constant x: In that sense,
integrals over r-chains are still integrals in R
r
: Nevertheless, these constructs
are very useful. Before exploiting them, in the next section more natural
integrals which may be understood more directly over domains of manifolds
are considered.
126 5 Integration, Homology and Cohomology