Eschrig H. Topology and Geometry for Physics
Подождите немного. Документ загружается.

5.3 Integration of Differential Forms
First, a regular domain X in a paracompact smooth orientable n-dimensional
manifold M is defined: every point x 2 M is either an inner point of X or an inner
point of M n X or there is a coordinate neighborhood ðU; uÞ of x such that uðU \
XÞ¼uðUÞ\R
n
where R
n
is the half-space of points x ¼ðk
1
; ...; k
n
Þ2R
n
with
P
i
k
i
1: In other words, the boundary of X is locally diffeomorphic to an ðn 1Þ-
dimensional hyperplane (the hyperplane
P
i
k
i
¼ 1 of R
n
). In this precise sense a
regular domain X is a domain with smooth boundary oX: Note, however, that a
regular domain X need not have a boundary at all, it could for instance be all M:
Let X have a boundary. Consider a smooth real function F on a neighborhood
of oX, which is constant on oX and for which Fðx
i
Þ\Fðx
o
Þ whenever x
i
is an inner
point of X and x
o
is an inner point of M n X: Let x 2 oX: A vector X of the
n-dimensional tangent space T
x
ðMÞ is an outer vector to X,ifXF [ 0: Consider
now the ðn 1Þ-dimensional tangent space T
x
ðoXÞ at a boundary point x 2 oX:
A base X
1
; ...; X
n1
in this tangent space is called coherently oriented with M,if
with an outer vector X to X the base X; X
1
; ...; X
n1
of T
x
ðMÞ defines the orien-
tation of M, that is, the dual base dx; dx
1
; ...; dx
n1
in T
x
ðMÞ defines the positive n-
form dx ^ dx
1
^^dx
n1
: It is clear that this definition of coherent orientation
does not depend on the chosen outer vector X, and that there is a coordinate
neighborhood U of x in oX and there are local coordinates x
0
1
; ...; x
0
n1
in U
smoothly defining an orientation coherent with that of M: In other words, an
orientation of T
x
ðoXÞ coherent with that of M is a smooth and hence all the more
continuous function of x on oX: Since an orientation can only have two discrete
values, if the orientation on oX is coherent with that of M, it must be constant on
each topological component of oX:
Now, let X be a regular domain in M and let x be an at least continuous n-form,
n ¼ dim M, with compact support. In order to define the integral of x over X,
regular n-simplices are defined as diffeomorphisms r from a neighborhood in R
n
of the standard n-simplex D
n
into M: If r preserves orientation, it is called an
oriented regular simplex.
A partition of unity on M (which exists since M is paracompact) is used to
reduce the integral over X to a sum of integrals over oriented regular simplices
covering supp x \ X: Since supp x \ X is compact, it has a finite open cover
fU
1
; ...; U
m
g: Let furthermore U be the open set U ¼ M nðsupp x \ XÞ, so that
fU; U
1
; ...; U
m
g is a finite open cover of M: Consider a partition of unity
f/; /
1
; ...; /
m
g subordinate to this open cover of M, that is, supp /
U; supp /
i
U
i
; i ¼ 1; ...; m and /ðxÞþ
P
i
/
i
ðxÞ¼1 on M: If U
i
X, choose
an oriented regular simplex r
i
the image of D
n
of which contains U
i
and is entirely
in X (which is always possible since X is closed and U
i
is open). If U
j
\ oX is non-
empty, choose an oriented regular n-simplex r
j
with X r
j
ðD
n
ÞU
j
\ X and so
that oX intersects only with the image of the face of D
n
opposite to the origin
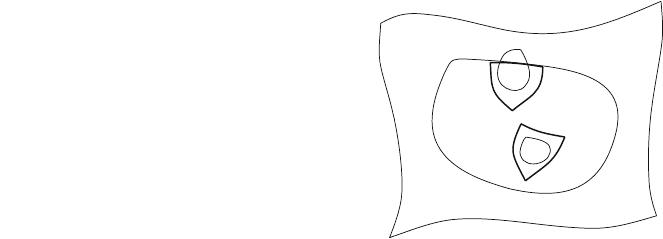
(Fig. 5.4).
5.3 Integration of Differential Forms 127
Although U may intersect X, no simplex need be chosen for U since supp / \
supp x \ X ¼ £ and hence /ðxÞxðxÞ¼0 on X: The images of the simplices
r
i
; i ¼ 1: ...; m form a closed (overlapping) cover of supp x \ X, and r
i
ðD
n
Þ\
ðM n XÞ¼£ for all i: On the other hand, /
i
ðxÞxðxÞ are smooth n-forms with
support in U
i
,ifx is smooth (since the /
i
are smooth by definition of a partition of
unity), and x ¼ /x þ
P
i
/
i
x on M: Since, however, /x ¼ 0 on X; x ¼
P
i
/
i
x
on X: Therefore, one may define
Z
X
x ¼
X
m
i¼1
Z
r
i
/
i
x ¼
X
m
i¼1
Z
D
n
r
i
ð/
i
xÞ: ð5:30Þ
The last sum is over well defined ordinary integrals in R
n
: It remains to show that
this expression is unique in the sense that it does not depend on the used partition
of unity.
Indeed, consider another partition fw; w
1
; ...; w
l
g subordinate to the open cover
fU; V
1
; ...; V
l
g and correspondingly chosen simplices r
0
i
; i ¼ 1; ...; l: (U was
defined by X and x only, hence it is not changed.) On supp x \ X, there holds
/ ¼ w ¼ 0: Hence,
X
m
i¼1
Z
r
i
/
i
x ¼
X
ij
Z
r
i
w
j
/
i
x;
X
l
j¼1
Z
r
0
j
w
j
x ¼
X
ij
Z
r
0
j
/
i
w
j
x:
By the above construction, for each pair ði; jÞ one has that suppðw
j
/
i
xÞ\r
i
ðD
n
Þ¼
suppð/
i
w
j
xÞ\r
0
j
ðD
n
Þ: It may be empty. If it is non-empty, r
1
i
r
0
j
is an ori-
entation preserving diffeomorphism on its open domain of definition in R
n
(open
neighborhood of part of D
n
) which maps part of D
n
into D
n
: Therefore,
Z
r
i
w
j
/
i
x ¼
Z
D
n
r
i
ðw
j
/
i
xÞ¼
Z
D
n
ðr
1
i
r
0
j
Þ
ðr
i
ðw
j
/
i
xÞÞ
¼
Z
D
n
r
0
j
ð/
i
w
j
xÞ¼
Z
r
0
j
/
i
w
j
x;
M
σ
i
σ
j
U
i
Ω
U
j
Fig. 5.4 Regular 2-simplices
for a parition of unity of M
128 5 Integration, Homology and Cohomology
and both double sums in the previous expressions are equal. (ðr
1
i
r
0
j
Þ
r
i
¼
r
0
j
r
1
i
r
i
¼ r
0
j
was used, see p. 74).
The definition (5.30) may now justly be considered to be the integral of the n-
form x over the regular domain X in M: If, on the other hand, x is a smooth
ðn 1Þ-form on M; dim M ¼ n, and x has compact support, then dx has also
compact support, and Stokes’ theorem holds:
Z
X
dx ¼
Z
oX
x: ð5:31Þ
Proof Use the partition of unity as in the definition of
R
X
: Since
P
i
/
i
¼ 1 on a
neighborhood of supp x \ X;
P
i
d/
i
¼ d
P
i
/
i
¼ 0 there and hence
P
i
dð/
i
xÞ¼
P
i
/
i
dx ¼ dx on X: For U
i
X;
R
oX
/
i
x ¼ 0 because /
i
¼ 0 on oX. /
i
¼ 0 on
the image of dr
i
too, and since a regular simplex is all the more a smooth singular
simplex, (5.29) applies, and
R
X
/
i
x ¼
R
r
i
/
i
x ¼ 0: Let U
i
\ oX 6¼ £: Then,
/
i
6¼ 0 in the interior of r
i
ðD
n1
0
Þ only where D
n1
0
is the face of D
n
opposite to
the origin. Since D
n1
0
is coherently oriented with D
n
and r
i
is orientation pre-
serving, r
i
ðD
n1
0
Þ is coherently oriented with r
i
ðD
n
Þ: Again (5.29) applies,
and
R
X
dð/
i
xÞ¼
R
r
i
dð/
i
xÞ¼
R
or
i
/
i
x ¼
R
oX
/
i
x: Hence in total,
R
X
dx ¼
R
X
P
i
dð/
i
xÞ¼
R
oX
P
i
/
i
x ¼
R
oX
x: h
Observe for both the definition of the integral over X and the proof of Stokes’
theorem: If X itself is compact, then x need not have compact support in M:
5.4 De Rham Cohomology
Consider as an example dim M ¼ 2 and the equation dx ¼ q where a 2-form q is
given and a 1-form x, in local coordinates x ¼ x
1
dx
1
þ x
2
dx
2
; is sought. One has
dx ¼ðox
2
=ox
1
ox
1
=ox
2
Þdx
1
^ dx
2
: How must q behave in order that the
equation has a solution x? For any domain X of finite measure one has
R
X
q ¼
R
X
dx ¼
R
oX
x: Hence, if X has no boundary (for instance if X ¼ S
2
is the two-
dimensional sphere), then
R
X
q ¼ 0 must hold as a necessary condition for a
solution x to exist. If M ¼ R
2
; then there are no such compact domains X without
boundary, and no such condition need be posed on q:
In the latter case, R
2
may be considered as the complex plane, x
1
¼
Re z; x
2
¼ Im z, and x may be considered as a complex function,
~
x ¼ iðx
1
þ
ix
2
Þ: For an analytic function
~
x; in this notation dx ¼ 0 by the Cauchy–Riemann
equations, and hence
R
oX
x ¼ 0; if X is an oriented domain of analyticity of
~
x the
oriented boundary of which is oX: This integral is in the adopted notation the
imaginary part of the complex integral, and its vanishing is part of Cauchy’s
5.3 Integration of Differential Forms 129
integral theorem. For the integral to vanish it is sufficient that oX is the complete
oriented boundary of a domain of analyticity of
~
x:
The two natural questions that arise in these considerations are: (i) which are
the domains X of a manifold M that have no boundary, and (ii) which surfaces of
M are complete oriented boundaries of oriented domains X: If for instance M is the
two-dimensional torus of Fig. 1.3 on p. 3 (which is orientable), then non of the
circles drawn in the figure is a complete oriented boundary, because as a boundary
it would have to have both orientations simultaneously. Only pairs of oppositely
oriented circles (winding around the torus in opposite directions are boundaries of
domains of the torus.
A domain which has no boundaries is called a cycle. (For instance a circle is a
one-dimensional cycle, an n-dimensional sphere S
n
is an n-cycle.) Clearly, every
boundary is a cycle, but, as the above example shows, the reverse need not be true.
Not every cycle need be a boundary. The classification of cycles and boundaries of
manifolds is the subject of homology theory. However, this theory turned out to be
simpler in a more general setting.
In Sect. 5.2, as a certain generalization of domains of manifolds r-chains of
singular r-simplices were introduced. Consider the real vector space
1
C
r
ðM; RÞ of
r-chains c ¼
P
l
k
l
r
l
of linear combinations with real coefficients k
l
of smooth
singular r-simplices r
l
: Only the smooth case is treated in the sequel although most
results hold also true in the continuous case. Therefore, the presubscript will be
omitted, C
r
ðM; RÞ¼
1
C
r
ðM; RÞ: Let B
r
ðM; RÞ be the set of boundaries and
Z
r
ðM; RÞ the set of cycles of C
r
ðM; RÞ: Since linear combinations of boundaries
are boundaries and linear combinations of cycles are cycles, both sets are linear
subspaces of C
r
ðM; RÞ: The boundary operator (recall that its operation on
C
r
ðM; KÞ is sometimes denoted by o
r
) maps C
r
ðM; RÞ into B
r1
ðM; RÞ
Z
r1
ðM; RÞC
r1
ðM; RÞ (since o o ¼ 0), and by definition of cycles it maps
Z
r
ðM; RÞ to 0:
Im o
r
¼ B
r1
ðM; RÞ; Ker o
r1
¼ Z
r1
ðM; RÞB
r1
ðM; RÞ; ð5:32Þ
where Im o
r
means the image of the boundary operator o
r
defined on C
r
ðM; RÞ;
and the kernel Ker o
r1
is defined as the preimage of the origin of C
r2
ðM; RÞ in
C
r1
ðM; RÞ: (See Compendium C.1 on homomorphisms.)
The direct sum of all C
r
ðM; RÞ; r 2 Z may be considered as a graded (by r)
vector space CðM; RÞ with an endomorphism o of degree 1:
CðM; RÞ¼f!
o
C
rþ1
ðM; RÞ!
o
C
r
ðM; RÞ!
o
C
r1
ðM; RÞ!
o
g: ð5:33Þ
CðM; RÞ is called a (real) chain complex. Recall that by definition C
r
ðM; KÞ¼
f0g for r\0, hence CðM; KÞ may be considered as an infinite sequence of map-
pings o
r
of modules. Together with a collection of r-simplices (repetition allowed)
the chain complex CðM; ZÞ contains all their oriented faces as ðr 1Þ-simplices,
the oriented faces of the latter as ðr 2Þ-simplices and so on down to the oriented
edges of 2-simplices as line elements and their oriented endpoints as 0-simplices
130 5 Integration, Homology and Cohomology
(set of all vertices of the original collection). This is how complexes originally
were introduced in topology. In the case of CðM; RÞ all those collections have in
addition real coefficients.
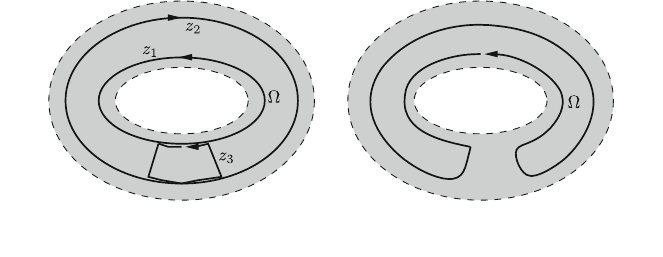
As an example, consider the three 1-cycles on the 2-torus depicted on the left
part of Fig. 5.5. As was already discussed, the cycles z
1
and z
2
are not boundaries.
Depending on the orientation of the torus, b ¼ z
1
þ z
2
is the boundary of the
visible domain X on the torus or of X: Let the first case be valid. Then, z
3
is the
boundary of minus the visible domain enclosed by this cycle. The sum b ¼
z
1
þ z
2
þ z
3
depicted on the right part of the figure is the boundary of the visible
enclosed domain denoted again X on this figure. One realizes, if certain cycles are
not boundaries, nevertheless their sums or differences may be boundaries. The
alert reader also immediately realizes the relevance of considerations of that type
for complex analysis, and indeed complex analysis of several variables was one of
the early motivations to develop homology theory.
Two r-cycles z
1
; z
2
are called homologous, z
1
z
2
, if their difference is an
r-boundary:
Z
r
ðM; KÞ3z
1
z
2
() z
1
z
2
2 B
r
ðM; KÞ: ð5:34Þ
A boundary is called homologically trivial. Hence, two cycles are homologous, if
their difference is homologically trivial. Clearly, the homology relation (5.34)is
an equivalence relation. The Abelian group of equivalence classes in homology of
r-cycles is called the rth homology group H
r
ðM; KÞ: It is the quotient group
H
r
ðM; KÞ¼Z
r
ðM; KÞ=B
r
ðM; KÞ¼Ker o
r
=Im o
rþ1
: ð5:35Þ
In the case K ¼ Z; as every Abelian group it may also be considered a module; if
K is a field (like R), more specifically it is a vector space. Unlike Z
r
ðM; KÞ and
B
r
ðM; KÞ; H
r
ðM; KÞ is finite-dimensional in most interesting cases.
The reader may convince himself from the above example that the main
topological difference between the 2-torus T
2
and the plane R
2
is that in R
2
every
cycle is a boundary (of the encircled domain) while in T
2
there are cycles which
are not boundaries. If all cycles of a chain complex (5.33) are boundaries, this
Fig. 5.5 1-cycles on a 2-torus. Left: z
1
and z
2
are not boundaries, z
3
is a boundary. Right:
b ¼ z
1
þ z
2
þ z
3
is a boundary
5.4 De Rham Cohomology 131
means that Im o
rþ1
¼ Ker o
r
for all r, or, equivalently, that all homology groups
are trivial: H
r
ðM; KÞ¼f0g: A sequence of morphisms between algebraic objects
like (5.33) is called an exact sequence, if the image of one morphism in the
sequence is the kernel of the next. Sequences of non-trivial chain complexes are
not exact.
Yet, exact sequences form a powerful tool in algebra. For instance, the exact
sequence of homomorphisms of Abelian groups or modules (in particular vector
spaces)
0 ! G!
f
H
means that f is injective: Since the image of the first mapping can only consist of
the zero element of G, the kernel of f must be f0g, and by linearity f must be
injective. If, on the other hand, the sequence
G!
f
H ! 0
is exact, this means that f is surjective: since all of H is mapped to 0 by the right
mapping, its kernel is all of H which also must be the image of f : Hence, the exact
sequence
0 ! G!
f
H ! 0
means that the homomorphism f is indeed an isomorphism. Interpret as an exercise
the so called short exact sequence for the case of Abelian groups or modules,
0 ! H ! G ! G=H ! 0;
where H is a subgroup or submodule of G and G=H is the quotient structure.
Coming back to the homology groups H
r
ðM; KÞ of (5.35), it will be seen later
that their dimensions are topological invariants.
b
r
ðMÞ¼dim H
r
ðM; RÞð5:36Þ
is called the rth Betti number of M:
Recall that a 0-simplex is just a point of M, a 0-chain hence is a linear com-
bination of points. Since C
1
ðM; RÞ is trivial, a 0-chain has zero boundary. Hence,
every 0-chain is a 0-cycle. The standard 1-simplex is a line element, its image in M
is a finite path between two points. Every pair of points ðz
1
; z
2
Þ which can be
connected by a path X in M yields a boundary as its difference: oX ¼ z
2
z
1
:
Hence, all points which can be connected by a path in M are homologous: the
pathwise connected components of M form a base of the vector space H
0
ðM; RÞ;
and the zeroth Betti number of any manifold M is equal to the number of pathwise
connected components of M:
If M is contractible (see Sect. 2.5), that is M may continuously be contracted
into one point, then it is intuitively clear and will formally be proved in the next
132 5 Integration, Homology and Cohomology
section that every r-cycle, r [ 0 is a boundary, that is, H
r
ðM; RÞ¼f0g: Hence,
b
r
ðMÞ¼0; r [ 0, if M is contractible. In particular,
b
0
ðR
n
Þ¼1; b
r
ðR
n
Þ¼0; r [ 0; n 1: ð5:37Þ
Less trivial cases will be considered in the sequel.
Comparison of o o ¼ 0 with d d ¼ 0 for the exterior derivation d of degree
+1 and consideration of Stokes’ theorem suggest a duality between the chain
complex CðM; RÞ and the graded algebra DðMÞ of exterior forms:
DðMÞ¼f
d
D
rþ1
ðMÞ
d
D
r
ðMÞ
d
D
r1
ðMÞ
d
g: ð5:38Þ
Again, as previously in Sect. 4.2, D
r
¼f0g if r\0 or r [ dim M: An exterior
r-form x on M is called a closed form,ifdx ¼ 0, it is called an exact form,if
there exists an ðr 1Þ-form r so that x ¼ dr: Two closed forms x
1
and
x
2
; dx
i
¼ 0 are called cohomologous to each other, x
1
x
2
, if their difference is
exact, that is, x
1
x
2
¼ dr for some form r: An exact form is called cohomo-
logically trivial. Clearly, every exact form is closed, and clearly, closed forms as
well as exact forms form linear subspaces of the vector spaces D
r
ðMÞ: De Rham’s
cohomology group is the quotient group
H
r
dR
ðMÞ¼fclosed r-formsg=fexact r-formsg¼Ker d
r
=Im d
r1
: ð5:39Þ
Since dim H
r
dR
ðMÞdim D
r
ðMÞ because H
r
dR
ðMÞ is a quotient space of a subspace
of D
r
ðMÞ; clearly dim H
r
dR
ðMÞ¼0 for r\0 or r [ dim M: Moreover, from
dim D
1
¼ 0 it follows that Im d
1
¼f0g, and hence H
0
dR
ðMÞ¼Ker d
0
: Now, a
0-form x
0
is a real function on M, and hence dx
0
¼ 0 means that the function x
0
is constant on each pathwise connected component of M (by integration of dx
0
along any path in M). If M has m components, then Ker d
0
is the space of real
m-tuples which means that dim H
0
dR
ðMÞ¼dim Ker d
0
is equal to the number of
pathwise connected components of M and hence equal to the Betti number b
0
ðMÞ:
It will be seen that this is not an accident.
Let x be a closed r-from and let z be an r-cycle. Consider the real number
hx; zi¼
Z
z
x
given by the integral (5.27, 5.28). It is obviously bilinear in x and z as suggested
by the way of writing. Let x
0
¼ dr be any exact r-form and let b ¼ oz
0
be any
r-boundary. Then, by virtue of Stokes’ theorem (5.29) for singular chains,
hx þ x
0
; zi¼
Z
z
x þ
Z
z
dr ¼
Z
z
x þ
Z
oz
r ¼hx; zi;
since oz ¼ 0 for a cycle z: Likewise,
5.4 De Rham Cohomology 133
hx; z þbi¼
Z
z
x þ
Z
oz
0
x ¼
Z
z
x þ
Z
z
0
dx ¼hx; zi;
since dx ¼ 0 for a closed form x: In effect, the considered integral depends on the
homology class ½z of the cycle z and on the cohomology class ½x of the closed
form x only:
h½x; ½zi ¼
Z
z
x ð5:40Þ
is a linear form on the space H
r
ðM; RÞ; that is, an element of the dual space
ðH
r
ðM; RÞÞ
; and every element ½x of H
r
dR
ðMÞ yields uniquely such a linear form.
In other words, (5.40) yields a homomorphism of vector spaces
H
r
dR
ðMÞ!ðH
r
ðM; RÞÞ
: ð5:41Þ
This reflects the point of view of letting ½x run through H
r
dR
ðMÞ and considering
(5.40) as linear functions on H
r
ðM; RÞ; that is, as elements of ðH
r
ðM; RÞÞ
:
De Rham’s theorem states that (5.41) is in fact an isomorphism.
In this connection the real number (5.40) is called the period of the r-form x
over the cycle z,
perðzÞ¼h½x; ½zi ¼
Z
z
x: ð5:42Þ
De Rham’s theorem implies that, if there exists a linear function per on Z
r
ðM; RÞ
with the property perðbÞ¼0 for every boundary b, then there exists a closed
r-form x so that
R
z
x ¼ perðzÞ: It also implies
dim H
r
dR
ðMÞ¼dimðH
r
ðM; RÞÞ
¼ dim H
r
ðM; RÞ¼b
r
ðMÞ: ð5:43Þ
Two isomorphic vector spaces have the same dimension, and two spaces con-
nected by a non-degenerate bilinear form have also the same dimension. More-
over, H
r
dR
ðMÞH
r
ðM; RÞ; if b
r
ðMÞ\1, since two real finite-dimensional vector
spaces of the same dimension are isomorphic. Now, considering (5.40)asa
bilinear form on H
r
dR
ðMÞH
r
ðM; RÞ; for every ½x 6¼ 0 there is a ½z so that (5.40)
is non-zero. Otherwise (5.40) would yield the same result on all ½z for ½x 6¼ 0 and
for ½x
0
¼0 and (5.41) could not be an isomorphism. Likewise, for every ½z 6¼ 0
there is an ½x so that (5.40) is non-zero. Otherwise for all ½x2dim H
r
dR
ðMÞ
(5.40) would yield the same value 0 on ½z 6¼ 0 and on ½z
0
¼0 and (5.41) would
not be surjective.
An immediate consequence is
b
r
ðMÞ¼0 for r [ dim M ð5:44Þ
134 5 Integration, Homology and Cohomology
and also that dim H
r
dR
ðMÞ¼0 for all r [ 0, if M is contractible. Hence in par-
ticular, on a contractible manifold M the necessary and sufficient condition for the
equation dx ¼ q to have a solution x is that q is closed, dq ¼ 0, since
dim H
r
dR
ðMÞ¼0 means that every closed form is exact.
In these considerations both H
r
dR
ðMÞ and H
r
ðM; RÞ are treated as real vector
spaces. (Recall that every vector space is an Abelian group with respect to vector
addition. This justifies to retain the names homology group and cohomology group
in the considered more special cases.) However, DðMÞ is also an algebra with
respect to exterior multiplication. It is easily seen that the wedge product is
compatible with the cohomology classes of DðMÞ: Indeed, let m; m
0
; x; x
0
be closed
forms and let m m
0
¼ dq; x x
0
¼ dr for some forms q and r, that is, ½m m
0
¼
0; ½x x
0
¼0: Then, obviously m ^ x and m
0
^ x
0
are also closed forms, and
m ^ x m
0
^ x
0
¼ðm m
0
Þ^x þ m
0
^ðx x
0
Þ¼dq ^ x þm
0
^ dr
¼ dðq ^ x þð1Þ
r
m
m
0
^ rÞþð1Þ
r
m
q ^ dx ð1Þ
r
m
dm
0
^ r:
The last two terms vanish since x and m
0
are closed forms. Hence, m ^x m
0
^ x
0
is an exact form. This implies that m ^ðx x
0
Þ and ðm m
0
Þ^x as special cases
of the just considered one are also exact forms. This altogether means that the
cohomology class ½m ^ x does not depend on the representatives of the coho-
mology classes ½m and ½x, and one may define a wedge product in H
r
dR
ðMÞ by
½m^½x¼½m ^ x: ð5:45Þ
Therefore, the de Rham cohomology H
dR
ðMÞ; the direct sum of all H
r
dR
ðMÞ; is
indeed again a graded algebra.
5.5 Homology and Homotopy
The alert reader may anticipate from the last section that there is a close con-
nection between the homology of chain complexes and homotopy.
Let F : M ! N be a (smooth) mapping from the (smooth) manifold M into the
(smooth) manifold N: (Recall that generally smooth entities are considered in this
volume.) Let CðM; RÞ be the chain complex on M: A (smooth) singular r-simplex
r 2 CðM; RÞ is a mapping of a neighborhood of the standard r-simplex in R
n
into
M: Clearly, F
ðrÞ¼F r is a singular r-simplex in N: Since the oriented
boundary of r was defined in (5.25) as the push forward by r of the oriented
boundary of the standard r-simplex, it is clear that F
maps cycles on M into cycles
on N and boundaries on M into boundaries on N: These mappings need of course
not be one–one, also, M and N need not have the same dimension. Recall that a
singular r-simplex in N even may consist of a single point. Nevertheless, and that
is one of the main advantages of singular chains, it is clear that F
o ¼ o F
and that F
: H
r
ðM; RÞ!H
r
ðN; RÞ is a homomorphism of vector spaces. Indeed,
5.4 De Rham Cohomology 135

if z
1
z
2
are homologous chains of CðM; RÞ then F
ðz
1
ÞF
ðz
2
Þ are homologous
chains of CðN; RÞ:
Now, let F
1
and F
2
be two homotopic mappings from M into N, that is
(Sect. 2.5), there is a continuous mapping H : ½0; 1M ! N with Hð0; Þ ¼ F
1
and Hð1; Þ ¼ F
2
. H may be extended to
~
I M where
~
I is an open neighborhood in
R of the closed interval ½0; 1: Together with M;
~
I M is also a smooth manifold.
Hence, H may be assumed to be smooth since F
1
and F
2
are smooth and a
continuous function on a smooth manifold (which latter is locally diffeomorphic
with R
n
) may be arbitrarily closely approximated by a smooth function.
Let z 2 CðM; RÞ be an r-cycle. Then, ðId
~
I
; zÞ2Cð
~
I M; RÞ is a singular
ðr þ 1Þ-chain, which is the image of an ðr þ 1Þ-cylinder in R
nþ1
of height 1 whose
basis and top is the same cycle of ordinary simplices. Clearly its boundary is
ð1; zÞð0; zÞ (Fig. 5.6, z itself as a cycle has no boundary). Hence, H
ðId
~
I
; zÞ2
CðN; RÞ is also a chain whose boundary is ðF
2
Þ
ðzÞðF
1
Þ
ðzÞ: Since the latter
difference is a boundary, ðF
1
Þ
ðzÞðF
2
Þ
ðzÞ are homologous:
The homomorphisms in homology ðF
1
Þ
and ðF
2
Þ
of homotopic maps F
1
and
F
2
from M into N are the same: ðF
1
Þ
¼ðF
2
Þ
:
Finally, let M and N be homotopy equivalent, that is, there exist mappings
F : M ! N and G : N ! M so that G F ffi Id
M
and F G ffi Id
N
(Sect. 2.5).
Since ðId
M
Þ
: H
r
ðM; RÞ!H
r
ðM; RÞ is the identity homomorphism and
ðG FÞ
¼ G
F
(cf. p. 73), it follows that G
¼ðF
Þ
1
and hence H
r
ðM; RÞ
and H
r
ðN; RÞ are isomorphic:
Homotopy equivalent manifolds have isomorphic homology groups.
Consider now a contractible manifold, that is, a manifold that is homotopy
equivalent to the one-point manifold fxg: In the latter manifold, every singular r-
simplex is a constant mapping r
r
of the standard r-simplex to x: Hence, every r-
chain is given as kr
r
; k 2 R; r 0: From (5.25) it follows that for r [ 0 the
boundary of kr
r
is kr
r1
if r is even and is the zero r-chain, if r is odd. That means
that for r [0; r odd, every r-chain is a cycle and at the same time is a boundary of
an ðr þ 1Þ-chain, while for r [ 0; r even, there are no non-zero cycles. In sum-
mary, all homology groups H
r
ðfxg; RÞ for r [ 0 are trivial (consist of the zero
element only and hence are also zero-dimensional). In view of the last theorem the
same is true for any contractible manifold, which also proves (5.37).
0
1
Fig. 5.6 A cylinder of height
1 with a cycle z (boundary of
a triangle) as basis
136 5 Integration, Homology and Cohomology