Durst F. Fluid Mechanics: An Introduction to the Theory of Fluid Flows
Подождите немного. Документ загружается.

24 2 Mathematical Basics
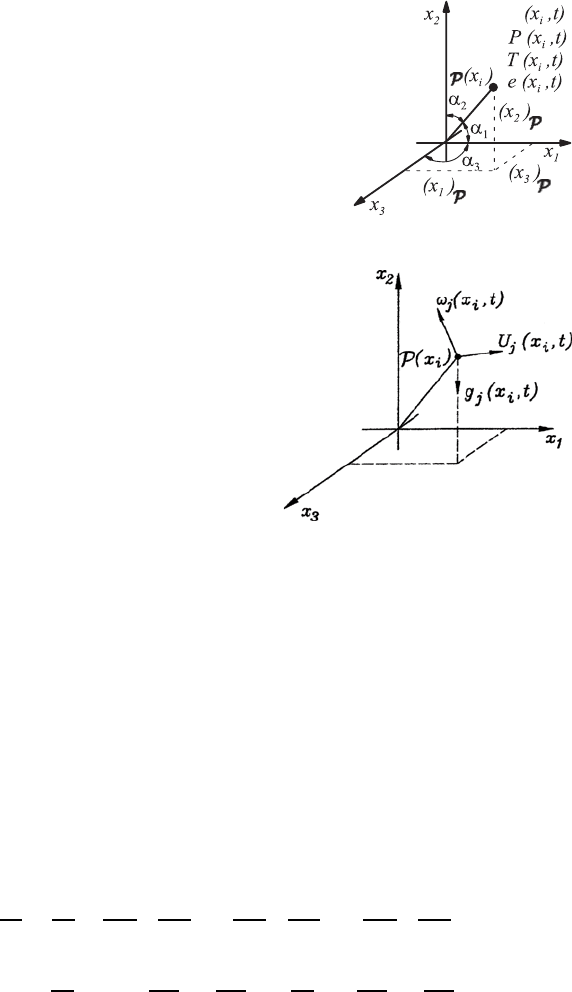
Fig. 2.4 Scalar fields assign a scalar to each point in
the space and as a function of time
r
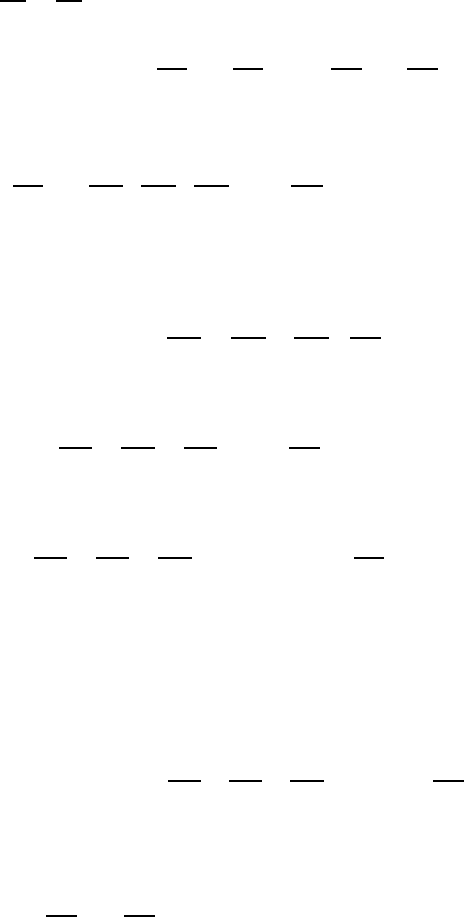
Fig. 2.5 Vector fields assign vectors to each
point in the space as functions of time
P(x
i
)attimet.Itrepresentsthej-momentum transport acting in the x
i
di-
rection. Further,
ij
(x
i
,t) represents the fluid element deformation depending
on the gradients of the velocity field at the location P(x
i
)attimet.
The properties introduced as field variables into the above considerations
represented tensors of zero order (scalars), tensors of first order (vectors) and
tensors of second order. They are employed in fluid mechanics to describe
fluid flows and the corresponding fluid description is usually attributed to
Euler (1707–1783). In this description, all quantities considered in the repre-
sentations of fluid mechanics are dealt with as functions of space and time.
Mathematical operations such as addition, subtraction, division, multiplica-
tion, differentiation and integration, that are applied to these quantities, are
subject to the known laws of mathematics.
The differentiation of a scalar field, for example the density ρ(x
i
,t), gives
dρ
dt
=
∂ρ
∂t
+
∂ρ
∂x
1
dx
1
dt
+
∂ρ
∂x
2
dx
2
dt
+
∂ρ
∂x
3
dx
3
dt
(2.32)
=
∂ρ
∂t
+
3
i=1
∂ρ
∂x
i
dx
i
dt
=
∂ρ
∂t
+
∂ρ
∂x
i
dx
i
dt
In the last term, the summation symbol
3
i=1
was omitted and the “Einstein’s
summation convention” was employed, according to which the double index
2.5 Field Variables and Mathematical Operations 25
i in
∂ρ
∂x
i
dx
i
dt
prescribes a summation over three terms i =1, 2, 3, i.e.:
3
i=1
∂ρ
∂x
i
dx
i
dt
=
∂ρ
∂x
i
dx
i
dt
(2.33)
The differentiation of vectors is given by the following expressions:
dU
dt
=
dU
1
dt
,
dU
2
dt
,
dU
3
dt
T
⇒
dU
i
dt
,i=1, 2, 3 (2.34)
i.e. each component of the vector is included in the differentiation. As the
considered velocity vector depends on the space location x
i
and the time t,
the following differentiation law holds:
dU
j
dt
=
∂U
j
∂t
+
∂U
j
∂x
i
dx
i
dt
(2.35)
When one applies the Nabla or Del operator:
∇ =
∂
∂x
1
,
∂
∂x
2
,
∂
∂x
3
T
=
∂
∂x
i
,i=1, 2, 3 (2.36)
on a scalar field quantity, a vector results:
∇a =
∂a
∂x
1
,
∂a
∂x
2
,
∂a
∂x
3
T
=grada =
∂a
∂x
i
,i=1, 2, 3 (2.37)
This shows that the Nabla or Del operator ∇ results in a vector field deduced
from the gradient field. The different components of the resulting vector are
formed from the prevailing partial differentiations of the scalar field in the
directions x
i
.
The scalar product of the ∇ operator with a vector yields a scalar quantity,
i.e. when (∇·) applied to a vector quantity results in:
∇·a =
∂a
1
∂x
1
+
∂a
2
∂x
2
+
∂a
3
∂x
3
=diva =
∂a
i
∂x
i
(2.38)
Here, in ∂a
i
/∂x
i
the subscript i again indicates summation over all three
terms, i.e.
3
i=1
∂a
i
∂x
i
=⇒
∂a
i
∂x
i
(Einstein’s summation convention) (2.39)
The vector product of the ∇ operator with the vector a yields correspondingly
∇×a =
e
1
∂/∂x
1
a
1
e
2
∂/∂x
2
a
2
e
3
∂/∂x
3
a
3
=
⎧
⎨
⎩
∂a
3
/∂x
2
− ∂a
2
/∂x
3
∂a
1
/∂x
3
− ∂a
3
/∂x
1
∂a
2
/∂x
1
− ∂a
1
/∂x
2
⎫
⎬
⎭
=rota (2.40)

26 2 Mathematical Basics
or
∇×a =rota = −
ijk
∂a
i
∂x
j
=
ijk
∂a
j
∂x
i
(2.41)
The Levi–Civita symbol
ijk
is also called the alternating unit tensor and is
defined as follows:
ijk
=
0 : if two of the three indices are equal
+1 : if ijk = 123, 231 or 312
−1:if ijk = 132, 213 or 321
(2.42)
Concerning the above-mentioned products of the ∇ operator, the distributive
law holds, but not the commutative and associative laws.
If one applies the ∇ operator to the gradient field of a scalar function, the
Laplace operator ∇
2
(alternative notation ∆) results. When applied to a,the
result can be written as follows:
∇
2
a =(∇·∇)a =
∂
2
a
∂x
2
1
+
∂
2
a
∂x
2
2
+
∂
2
a
∂x
2
3
=
∂
2
a
∂x
i
∂x
i
(2.43)
The Laplace operator can also be applied to vector fields, i.e. to the compo-
nents of the vector:
∇
2
U =
⎛
⎜
⎝
∇
2
U
1
∇
2
U
2
∇
2
U
3
⎞
⎟
⎠
=
⎛
⎜
⎝
!
∂
2
U
1
/∂x
2
1
"
+
!
∂
2
U
1
/∂x
2
2
"
+
!
∂
2
U
1
/∂x
2
3
"
!
∂
2
U
2
/∂x
2
1
"
+
!
∂
2
U
2
/∂x
2
2
"
+
!
∂
2
U
2
/∂x
2
3
"
!
∂
2
U
3
/∂x
2
1
"
+
!
∂
2
U
3
/∂x
2
2
"
+
!
∂
2
U
3
/∂x
2
3
"
⎞
⎟
⎠
(2.44)
2.6 Substantial Quantities and Substantial Derivative
A further approach to describing fluid mechanics processes is to derive the
basic equations in terms of substantial quantities. This approach is generally
named after Lagrange (1736–1813) and is based on considerations of proper-
ties of fluid elements. The state quantities of a fluid element such as the
density ρ
, the pressure P
, the temperature T
and the energy e
are em-
ployed for the derivation of the laws of fluid motion. If one wants to measure
or describe these properties of a fluid element in a field, one has to move with
the element, i.e. one has to follow the path of the element:
(x
i
)
,T
=(x
i
)
,0
+
#
T
0
(U
i
)
dt (2.45)
As the path of a fluid element is only a function of time t and an initial space
coordinate (x
i
)
,0
, the substantial quantities, i.e. the thermodynamic state
quantities of a fluid element can also only be functions of time.

2.7 Gradient, Divergence, Rotation and Laplace Operators 27
Thus the total differentials of all substantial quantities can be formulated
as follows, with reference to (2.35):
da
dt
=
∂a
∂t
+
∂a
∂x
i
dx
i
dt
, where
dx
i
dt
=(U
i
)
(2.46)
The quantity specified with (dx
i
/dt)
indicates the change of position of a
fluid element with time, i.e. the substantial velocity of a fluid element.
If a fluid element is positioned at time t at location x
i
,then(U
i
)
= U
i
results and from this arises the final equation of the substantial derivative of
afieldvariableDa/Dt:
da
dt
=
Da
Dt
=
∂a
∂t
+ U
i
∂a
∂x
i
(2.47)
This equation results also from the identity relationship. This states, for a
representation of a fluid flow in two different ways, without contradiction,
that the following equality of Euler and Lagrange variables holds:
a
(t)=a(x
i
,t)if(x
i
)
= x
i
at time t
From this one can derive
da
dt
=
∂a
∂t
+(U
i
)
∂a
∂x
i
=
∂a
∂t
+ U
i
∂a
∂x
i
=
Da
Dt
(2.48)
From (2.47), it can be seen that the operator
D
Dt
(= substantial derivative)
can be written as follows:
D
Dt
=
∂
∂t
+ U
i
·
∂
∂x
i
=
∂
∂t
+(U ·∇) (2.49)
This operator can be applied to field variables and is very important for the
subsequent derivations of the basic equations of fluid mechanics, as it permits
the formulation of the basic equations in Lagrange variables and in a second
step the subsequent transformation of all terms in this equation into Euler
variables. In this final form, i.e. expressed in Euler variables, the equations
are suited for the solution of practical flow problems.
2.7 Gradient, Divergence, Rotation
and Laplace Operators
a(x
i
,t) represents a scalar field, i.e. it is defined or given as a function of space
and time. The gradient field of the scalar ‘a’ can be assigned the following
components at each point in a space:
28 2 Mathematical Basics
a(x
i
,t)=⇒
∂a
∂x
i
=grad(a)=
⎧
⎨
⎩
∂a/∂x
1
∂a/∂x
2
∂a/∂x
3
⎫
⎬
⎭
;grad(a)=f(x
i
,t) (2.50)
Thus the operator grad( ) is defined as follows:
grad() =
∂()
∂x
i
=
∂()
∂x
1
∂()
∂x
2
∂()
∂x
3
(2.51)
i.e. grad(a) is a vector field, whose components are marked by the index i.
The grad(a) vectors exhibit directions which are perpendicular to the lines
of a = constant of the considered scalar field, i.e. perpendicular to a(x
i
,t)=
constant.
Furthermore, the Laplace operator can be assigned to each scalar field
a(x
i
,t) ⇒ ∆a(x
i
,t) (J.S. Laplace (1749–1827)). Here, ∆a(x
i
,t) is a scalar
field, e.g. to each space point the quantity ∆(a)isassigned
∆a(x
i
,t)=
∂
2
a
∂x
i
∂x
i
=
∂
2
a
∂x
2
1
+
∂
2
a
∂x
2
2
+
∂
2
a
∂x
2
3
(2.52)
Employing the previously defined divergence operator, the following equation
results:
∆a(x
i
,t) = div(grad a)=div
∂a
∂x
i
=
∂
2
a
∂x
i
∂x
i
=
∂
2
a
∂x
2
i
(2.53)
For the mathematical treatment of flow problems, there are other mathemat-
ical operators of importance, in addition to the operators div( ) and rot( ) =
curl( ) that are applicable to vector fields such as U (x
i
,t) and are defined as
follows:
div (U (x
j
,t)) =
∂U
i
∂x
i
=
∂U
1
∂x
1
+
∂U
2
∂x
2
+
∂U
3
∂x
3
(2.54)
and
rot U(x
j
,t)=
ijk
·
∂U
j
∂x
i
=
⎧
⎨
⎩
∂U
3
/∂x
2
− ∂U
2
/∂x
3
∂U
1
/∂x
3
− ∂U
3
/∂x
1
∂U
2
/∂x
1
− ∂U
1
/∂x
2
⎫
⎬
⎭
(2.55)
Here, div U is a scalar field and rot or curl U are vector fields. When U is a
velocity field, the value of div U describes the temporal change of the volume
δV
of a fluid element with constant mass δm
, i.e.
div (U )=
∂U
i
∂x
i
=
1
δV
d(δV
)
dt
(2.56)
If the density ρ = constant is included, div(ρU ) implies a mass density source
at the point x
i
at time t. Correspondingly, rot (U)orcurl(U )representthe
vortex density of the velocity field at the point x
i
at time t.Ifcurl(U)=0,
a fluid element at the point x
i
,andattimet, experiences no contribution

2.8 Line, Surface and Volume Integrals 29
to its rotation by the velocity field. For rot (U) =0attimet and at point
x
i
, a fluid element consequently experiences, at the corresponding point, a
contribution to its rotational motion.
In summary, the operators described above can be formulated as follows:
grad(a)=
∂a
∂x
i
= ∇a (2.57)
div (U )=∇·U
i
=
∂U
i
∂x
i
(2.58)
∆a = ∇
2
a = ∇·∇a =
∂
∂x
i
∂a
∂x
i
=
∂
2
a
∂x
i
∂x
i
(2.59)
rot (U )=∇×U =
ijk
∂U
j
∂x
i
(2.60)
These operators will be employed for the derivation of the basic equations of
fluid mechanics and also when dealing with flow problems.
2.8 Line, Surface and Volume Integrals
The line integral of a scalar function a(x
i
,t) along a line S is defined as
follows:
I
s
(t)=
#
S
a dS =
#
S
a(x
i
,t)dS with x
i
∈ S (2.61)
Line integrals of this kind are required in fluid mechanics to define the position
of the “center of gravity” of a line. Their computation is carried out in three
stepsasfollowsfort = constant:
1. The viewed curve is parameterized:
S : s(γ)={s
i
(γ)}
T
,α≤ γ ≤ β (2.62)
2. The arched element ds is defined by differentiation:
ds =
ds
i
(γ)
dγ
dγ =
$
ds
i
(γ)
dγ
2
dγ (2.63)
3. The computation of the defined integral from γ = α to γ = β:
I
s
=
#
β
α
a(s
i
(γ))
$
ds
i
dγ
2
dγ ; I
s
(2.64)
The application of the above steps for the computation of the defined integral
leads for a = 1 to the length of the considered curve s(γ) between γ = α and
γ = β.

30 2 Mathematical Basics
Analogous to the above considerations, the integration of a vector field
along a curve can be carried out in the following way:
I
s
i
(t)=
#
S
a
i
· ds
i
=
#
β
α
a
i
(s
j
(γ))
ds
i
(γ)
dγ
dγ at time t (2.65)
Computations of the work done in the fields of forces, the circulation
of mass and momentum flow in the case of two-dimensional flow fields are
effected via such defined integrations of vector fields along space lines.
Analogous to the integrals along lines or along line segments, space inte-
grals for scalar and vectors can also be defined and computed according to
the following computation rules:
I
F
(t)=
#
F
#
a dF at time t (2.66)
If F is the surface area of a considered fluid element and a(x
i
,t) a scalar field,
that is continuous on the surface, the above integral as the surface integral is
named from a to F . The surface-averaged value of a is computed as follows:
˜a =
1
F
0
#
F
0
#
a dF
0
(surface mean value) (2.67)
For the surface integral of a vector field holds that
I
F
(t)=
#
F
#
a
i
dF
i
=
#
F
#
a
i
n
i
dF at time t (2.68)
For the case a
i
= U
i
, i.e. the execution of a surface integration over the veloc-
ity field, an integral value is obtained that corresponds to the instantaneous
volume flow through the surface F :
˙
Q(t)=
#
F
#
U
i
dF
i
(volume flow through F at time t) (2.69)
Analogously, the mass flow through F is computed by
˙
M(t)=
#
F
#
ρU
i
dF
i
(mass flow through F at time t) (2.70)
The mean mass flow density is given by
%
˙m(t)=
1
F
#
F
#
ρU
i
dF
i
(2.71)
2.9 Integral Laws of Stokes and Gauss 31
The above integrations can be extended to volume integrals, which again
can be applied to scalar and vector fields. If V designates the volume of a
regular field and a(x
i
,t) a steady scalar field (occupation function) given in
this space, the total occupancy of the space is computed as follows:
I
V
(t)=
##
V
#
a dV (total occupancy of V through a at time t) (2.72)
The mass of a regular space with the density distribution ρ(x
i
,t)resultsin
the following triple integral of the density distribution ρ(x
i
,t):
M(t)=
##
V
#
ρ(x
i
,t)dx
1
dx
2
dx
3
(2.73)
Here, variables with %and &symbols indicate surface- and volume-averaged
quantities in this chapter of the book.
For the practical implementation of surface and volume integrations, it is
often advantageous to employ the laws of Guldin:
1. Law of Guldin (1577–1643): The surface area of a body with rotational
symmetry is given by
'
s
2π · r(s)ds,withds denoting an arc element of
the plane curve s generating the body and r(s) denoting the distance of
ds from the axis of rotation.
2. Law of Guldin (1577–1643): The volume of a body with rotational sym-
metry is given by
'
F
2π · r
s
(F ) · dF ,withdF denoting an area element
oftheareaenclosedbytheplanecurves generating the body and r
s
(F )
denoting the distance of dF from the axis of rotation.
2.9 Integral Laws of Stokes and Gauss
The integral law named after Stokes (1819–1903) reads
(
s
a · ds =
#
O
s
#
rot a · dF (2.74)
which means that the line integral of a vector a over the entire edge line of
a surface is equal to the surface integral of the corresponding rotation of the
vector quantity over the surface. Thus the integral law of Stokes represents
a generalization of Green’s law (1793–1841), which was formulated for plane
surfaces, i.e. for “spatial areas”. If one stretches two different surfaces over a
boundary of surface S, Stokes’ law gives
#
O
S
1
#
rot a · dF =
#
O
S
2
#
rot a · dF (2.75)
32 2 Mathematical Basics
where S is equal to the stretching quantities of O
S
1
and O
S
2
. If one introduces
by Γ =
)
S
Uds the term of circulation of a vector field U along a boundary
S employing the mean-value law of the integral calculus from the rot integral
of velocity field U
i
over a surface O
S
with normal n, surface area F and
boundary curve S, the surface integral of the vector field U when F → 0in
the borderline case results:
Γ = n · rot U = lim
F →0
1
F
(
S
U · dS
This relation makes it clear that the rotation effect of a fluid element is at its
maximum when the surface normal n is in the direction of the rot U vector.
The integral law named after Gauss can be formulated as follows:
##
V
#
div a · dV =
##
V
#
∂a
i
∂x
i
dV =
(
O
V
(
a · dF =
(
O
V
(
a
i
· n
i
dF (2.76)
Thus the flow of the vector field a(x
i
,t) through the surface of a regular
space, i.e. the flow “from the inside to the outside”, is equal to the volume
integral of the divergence over the space. The mean-value theorem of the
integral calculus for V → 0 and consideration of a velocity field U
i
give
div U =
∂U
i
∂x
i
= lim
V →0
1
V
#
O
V
#
U · dF (2.77)
The divergence of a velocity field thus measures the flow emerging from the
volume unit, i.e. it is the source density of U
i
in the point x
i
at time t.
2.10 Differential Operators in Curvilinear Orthogonal
Coordinates
The compilation of important equations and definitions of vector analysis
to date is based on the Cartesian coordinate system. A great number of
problems can, however, be treated more easily in a curvilinear coordinate
system usually adapted to a considered special geometry. As examples are
cited the creeping flow around a sphere or the flow through a tube with
a circular cross-section which can be described appropriately in spherical
and cylindrical coordinates, respectively. In addition, the solution of a flow
problem can often be simplified considerably by exploiting the symmetry
properties of the problem in a curvilinear coordinate system adapted to the
geometry.
In this section, only some frequently used relationships for the differential
operators in curvilinear orthogonal coordinate systems will be recalled with-
out strict derivations. More detailed and mathematically precise presentation

2.10 Differential Operators in Curvilinear Orthogonal Coordinates 33
can be found in the corresponding literature, as for example [2.3], [2.4] and
[2.5], on whose presentation this section is oriented.
General curvilinear coordinates (x
1
,x
3
,x
3
) can be computed from
Cartesian coordinates (x, y, z) by (local) unequivocally reversible relations:
x
1
= x
1
(x, y, z)
x
2
= x
2
(x, y, z) (2.78)
x
3
= x
3
(x, y, z)
Conversely the Cartesian coordinates depend on the curvilinear ones:
x = x(x
1
,x
2
,x
3
)
y = y(x
1
,x
2
,x
3
) (2.79)
z = z(x
1
,x
2
,x
3
).
If one holds on to two coordinates, one obtains, with the third coordinate as
a free parameter, a space curve, the so-called coordinate line, for example:
r = r(x
1
,x
2
= a, x
3
= b) (2.80)
Concerning the respective tangential vectors
t
i
=
∂r
∂x
i
,i=1, 2, 3 (2.81)
of the coordinate lines in point P (x
1
,x
2
,x
3
) with the definition of the so-
called metric coefficients
h
i
:=
∂r
∂x
i
,i=1, 2, 3 (2.82)
the unit vectors
e
i
=
1
h
i
t
i
,i=1, 2, 3 (2.83)
can be defined that form the basic vectors for a local reference system in point
P . To be emphasized here is the local character of this reference system for
general curvilinear coordinates, as the basic vectors themselves can depend
on coordinates, contrary to coordinate-independent basic vectors (e
x
, e
y
, e
z
)
of the Cartesian coordinate system. If the coordinate lines at each point stand
vertically on one another in pairs, i.e. the following relationship
e
i
· e
j
= δ
ij
(2.84)
holds, one designates the coordinate system curvilinear orthogonal coordinate
system. Curvilinear orthogonal coordinate systems are the subject of this
section. The reader interested in general curvilinear coordinate systems is
referred, for example, to the book by R. Aris [2.3].