Du C., Xie L. Modeling and Control of Vibration in Mechanical Systems
Подождите немного. Документ загружается.

54 Modeling and Control of Vibration in Mechanical Systems
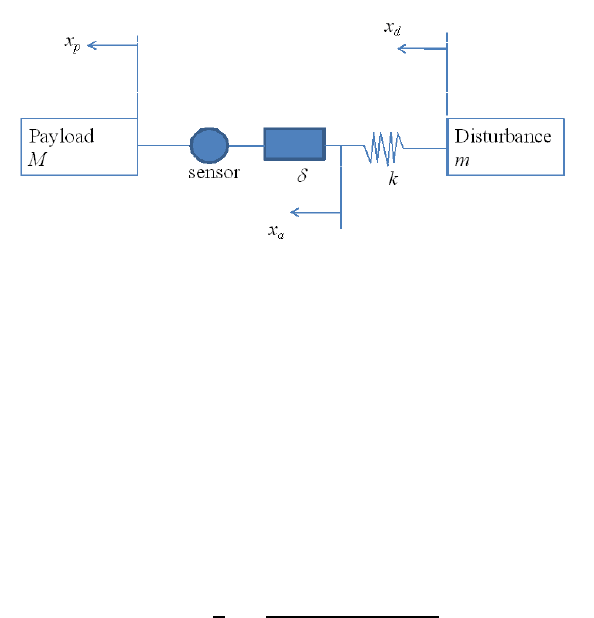
FIGURE 3.1
Single-axis system using piezoelectric stiff actuator.
Ms
2
x
p
= −ms
2
x
d
= k(x
d
−x
a
) = y (3.1)
and
δ = x
p
− x
a
. (3.2)
The transfer function between the extension δ of the piezo stack and the sensor
output y is
y
δ
= k
Mms
2
Mms
2
+ k(M + m)
. (3.3)
Consider the piezoelectric hexapod integrated in a structure. Let M and K be the
mass and stiffness matrices of the global passive system, i.e., structure and hexapod.
The dy namic equati on governi ng the system is written as
Ms
2
x + Kx = Bf, (3.4)
where B is the fo rce Jacobian matrix, x represents payload frame disp lacement, and
f = kδ represents the equivalent piezoelectric force in the leg. A force sensor is lo-
cated i n each leg of the hexapod and collocated with the actuator. The corresponding
sensor output is
y = k(q − δ), (3.5)
where y is the force sensor outpu t and q is the leg extension from the equilibrium
position. Taking in to account the relationship between the leg extension and the
payload fr ame displacement
q = B
T
x, (3.6)
Modeling of Stewart Platform 55
the sensor output equation becomes
y = k(B
T
x − δ). (3.7)
The sensor output y is to be used as the input to the controller.
Next an adaptive filtering approach will be used to model the hexapod Stewart
platform and verify the dynamics equati on (3.3).
3.3 Modeling using ad aptive filtering approach
3.3.1 Adaptive filtering theory
LMS algorithm
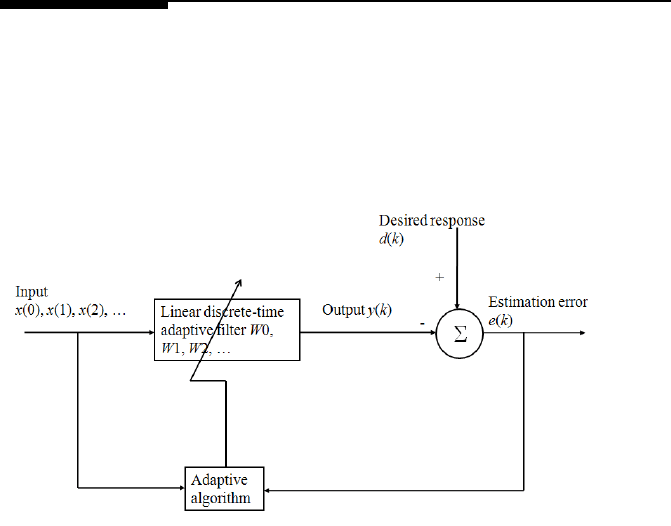
FIGURE 3.2
Linear discrete t ime adaptive filter.
In Figure 3.2, the statistically stationary time sequence of input signal, x(0), x (1),
···, is applied to the linear discrete time filter wh ose coefficients are W 0, W 1, ···.
The filter out put at time k, y(k), is to be as close as possible to the desired response,
d(k). The difference between y(k) and d(k) is defined as the estimation error, e(k)
that is then applied back to the filter to adjust the filter weig hts so as to minimize
the estimatio n error in the statistical sense. y(k) = W
T
(k)X(k), where W
T
(k) =
[W 0 W 1 W 2 ···], and X
T
(k) = [x (k) x(k − 1) x(k − 2) ···].
In most practical instances the adaptive process aims to minimize t he mean-square
value, or average power of the error signal [37]. Optimizatio n under this criterion is

56 Modeling and Control of Vibration in Mechanical Systems
most effective in stati stical sense. So the performance index of the adaptive filter is
determined by the mean-squared error (MSE) criterion in which the cost functi on is
defined as follows.
ξ(k) = E[e
2
(k)], (3.8)
where E[ ] denotes the expected value.
e(k) = d(k) − y(k)
= d(k) − W
T
(k)X(k). (3.9)
ξ(k) = E[(d(k) − W
T
(k)X(k))
2
]
= E[d
2
(k)] − 2W
T
(k)E[d(k)X(k)] + W
T
(k)E[X(k)X
T
(k)]W (k)
= R
dd
−2W
T
(k)R
dx
+ W
T
(k)R
xx
W (k), (3.10 )
where R
dx
is the cross correlation function between d(k) and x(k), R
dd
and R
xx
are
respectively the autocorrelat ion functi ons of d(k) and x(k).
In many practical applications, the st atistics of d(k) and x(k) are unknown; the
exact knowledge o f gradient vector is not available. Thus t he metho d of steepest de-
scent [35] cannot be implemented in practical situations. Therefore another method
called the Least Mean Square (LMS) algorithm was introduced by Bernard Widrow
[37]. In the LMS algorithm, instantaneous squ ared error is used as an estimati on
of the mean squared error. The mathematical derivation of the LMS alg orithm is as
follows.
ˆ
ξ(k) = e
2
(k),
∇
ˆ
ξ(k) = ∇e
2
(k) = 2[∇e(k)]e(k),
e(k) = d(k) − W
T
(k)X(k),
∇e(k) =
∂e(k)
∂W (k)
= −X(k),
∇
ˆ
ξ(k) = −2X(k)e(k). (3.11 )
The up dating equation of the adapt ive filter coefficient:
W (k + 1) = W (k) −
µ
2
∇
ˆ
ξ(k),
becomes
W (k + 1) = W (k) + µX(k)e(k). (3.12 )
Modeling of Stewart Platform 57
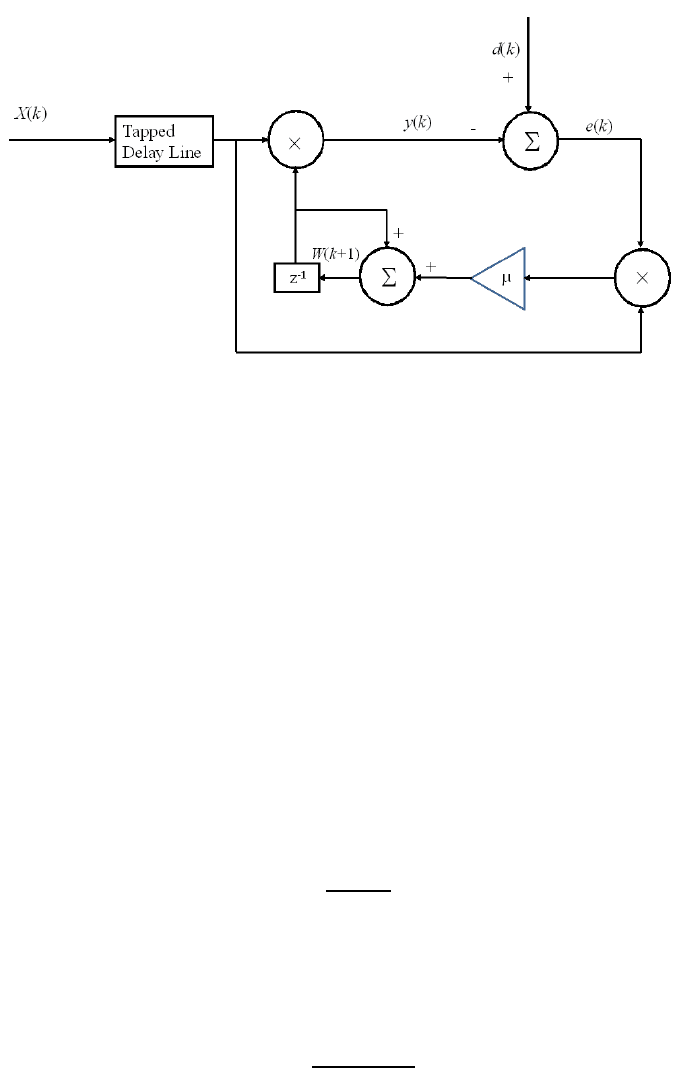
FIGURE 3.3
Block diagram of the LMS adaptive filter.
Equation (3.12) is the well-known LMS algorithm th at is suitable for practical
signal processing applications because o f its simplicity and the availability of th e in-
stantaneous error in real time. The block diagram of the LMS al gorithm is illustrated
in Figure 3.3.
Normalized LMS algorithm
The LMS adaptation process is very much dependant on the step size µ and the
reference signal power. The step si ze determines the system convergence rate and
stabil ity [36][37]. The maximum stable step size is i nversely proportional to the filter
order L and the power of the reference signal x (k). A technique used to optimize
the convergence speed, independent of the reference signal power, is known as the
normalized LMS algorithm (NLMS).
The NLMS algor ithm is given as follows.
W (k + 1) = W (k) + µ(k)X(k)e(k), (3.13 )
where each variable is identical to the one for the LMS algorithm except for µ(k)
that is an adaptive st ep size computed as
µ(k) =
α
L
ˆ
P
x
(k)
, (3.14)
where α is a normalized step size that satisfies 0 < α < 2, L is the filter length, and
ˆ
P
x
(k) is the estimated power of the reference signal x(k).
The estimation of
ˆ
P
x
(k) can be done using the mean square value of the reference
signal as follows.
ˆ
P
x
(k) =
X
T
(k)X(k)
L
. (3.15 )
58 Modeling and Control of Vibration in Mechanical Systems
Then Equation (3.14) reduces to
µ(k) =
α
X
T
(k)X(k)
. (3.16 )
This step size is the most widely used for the NLMS algor ithm. A variant of the
NLMS alg orithm uses a small constant ε as follows.
µ(k) =
α
ε + X
T
(k)X(k)
. (3.17)
This con stant ensures that the step size does not tend to infinity in the case of a
zero input signal.
The NLMS algori thm guarantees an attenuation level of γ ≤ 1, where γ is the
induced-norm from noise or signal inputs to the filtering error. Therefore, a salient
feature of this algorit hm is that it lowers t he influence o f the input signal on the no ise
amplification effect, especially when t he input signal x(k) is large.
3.3.2 Modeling of a Stewart platform
Adaptive identification is a technique th at uses an adaptive filter to model an un-
known system. An adaptive identification method can be applied either online along
with the vibration control or offline pri or to the vibration control. In an onlin e identi-
fication system, the number of adaptive filters required for an adaptive control system
will be increased. Furthermore, convergence of the adaptive filter used in the identi-
fication section of the system can be affected by a large amount of primary vibration
signal [36]. Therefore an offline identification technique will be applied for the sys-
tem mod eling.
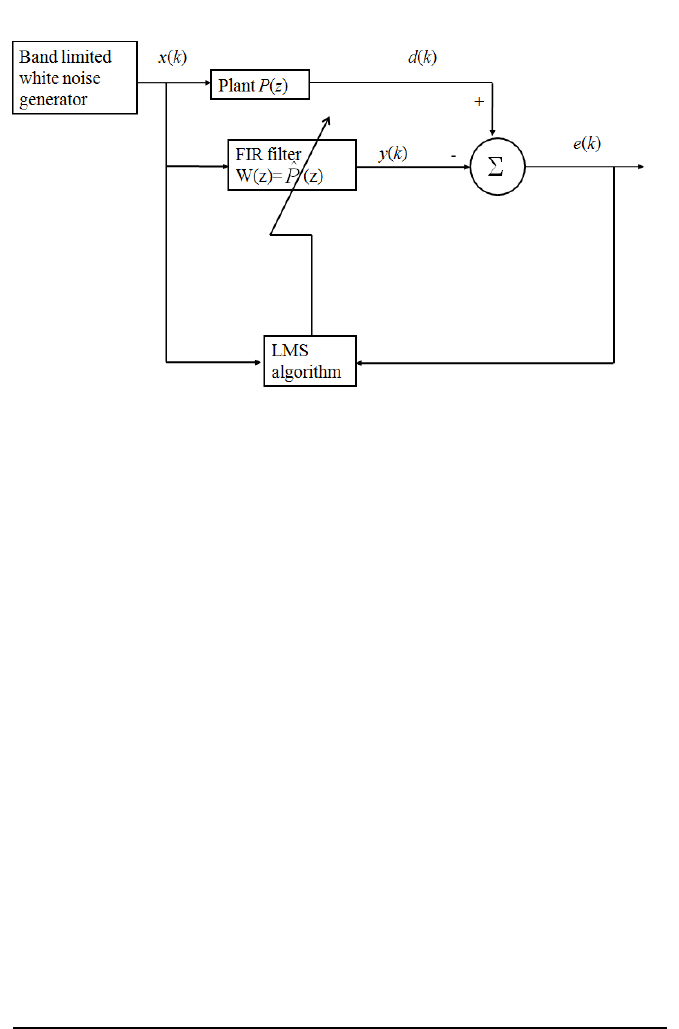
The block diagram of the adaptive identification is illustrated in Figure 3.4. P (z)
is the transfer function of the system to be identified. W (z) is a digital filter used
to model P (z) based on the LMS error minimization algorithm. Both systems P (z)
and W (z) are excited by a band limited white noise. The difference between the
two outputs d(k) and y(k) is fed back into the LMS algorithm as error signal e(k).
The LMS algorithm will adaptively adjust the coefficients of filter W (z) to minimize
e(k) based on the least MSE criterion. When the error signal reaches the minimum
level, the filter W (z) r epresents a model of P (z).
The LMS adaptive filter approach is applied for the modeling of the Stewart plat-
form. A Simulink program is developed for offline identification of the platform.
A 16th order LMS adaptive filter with adaptation step size of 0.01 is chosen. A
band-limited white noise is used as the training signal. Sampling frequency of the
white noise generator is set at 1 kHz so that the response of the PZT actuator will be
confined to the bandwidth of 500 Hz (half o f sampling frequency). But the sampling
frequency of the adaptive filter is set to 10 kHz to give enough time for adaptive filter
to compute the filter weights within each sample of the training signal .
The Simulink pr ogram for the identification is downloaded into a dSPACE real
time interface board DS1104. Identification process for each PZT actuator is per-
formed alternatively. Filter tap values are recorded throug h the dSPACE manager
Modeling of Stewart Platform 59
FIGURE 3.4
System identi fication u sing LMS adaptive filter.
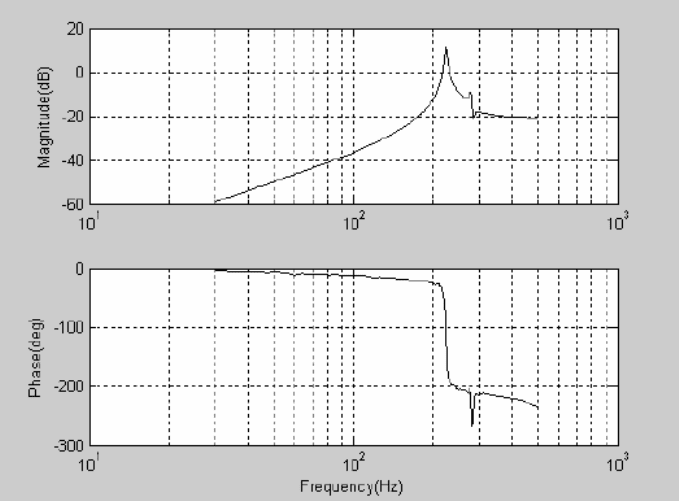
software during the identification process. From the results of the identification of
six PZT actuators of the Stewart platform in Figure 1.2, one of the resonance fre-
quencies of the smart structure is found to be around 240 Hz. Figure 3.5 is the phase
and magnitude responses of one of the six PZT actuators. The result shows that there
is a resonance peak at about 240 Hz. The ph ase response between 60 Hz and 200
Hz i s approximately linear. Experimental results of the active vibration control sy s-
tem also indicate that the frequency region that can attenuate the vibration signal i s
between 60 Hz and 220 Hz.
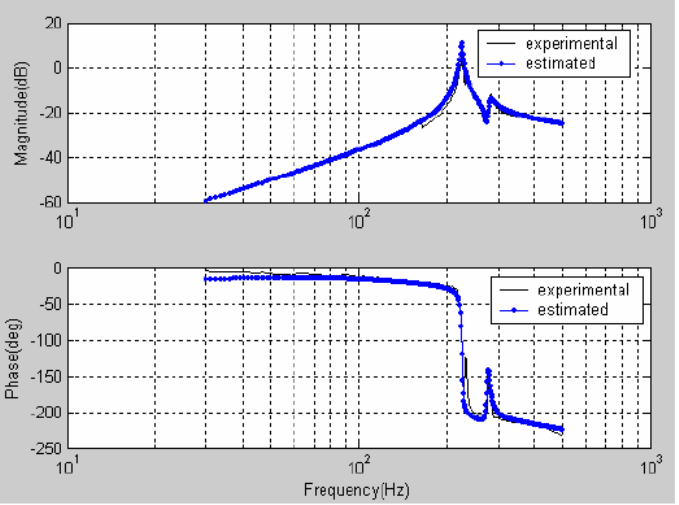
By applying a frequency domain modeling approach, an approximate model in
terms of a transfer fun ct ion for each leg can be obtained. Figure 3.6 shows the fre-
quency responses of an PZT actuator, including the estimated and the experimental
ones. It is clearly shown that the estimated transfer f unction is well fitted to th e real
one. It is also noted that the shape o f the frequency responses in Figure 3.6 agrees
with that of the model in (3.3).
The transfer function of the PZT actuator i s obtained as:
P (s) =
−190.9s
4
−1.499 × 10
4
s
3
−5.703 × 10
8
s
2
− 2.507 × 10
10
s − 5.624 × 10
11
s
5
+ 3232s
4
+ 5.378 × 10
6
s
3
+ 1.621 × 10
10
s
2
+ 6.82 ×10
12
s + 1.943 ×10
16
.
(3.18 )
60 Modeling and Control of Vibration in Mechanical Systems
FIGURE 3.5
Frequency responses of a PZT actuator.
Modeling of Stewart Platform 61
FIGURE 3.6
Estimated and experimental frequency responses.

62 Modeling and Control of Vibration in Mechanical Systems
3.4 Conclusion
This chapter has studied the modeling of an active piezoelectric Stewart platform.
The LMS adaptive filterin g approach has been adopted for the system identification.
The model obtained via the adaptive identification or the experimental testing has
shown consistency with the governing mot ion equation.
4
Classical Vibration Control
4.1 Introduction
The presence o f vibration often leads to undesirable effects such as structural o r
mechanical failure, frequent and costly maintenance of machines, worsening posi-
tioning performance, and human pain and discomfort. Vibrations can sometimes be
eliminated theoretically. However, due to the high manufacturing cost that may be
involved in eliminating vibration , reduction of vibrati on is preferred so as to achieve
a compromise between an acceptable amount of vibr at ion and a reasonable manu-
facturing cost . Various cl assical techniques of vibration contr ol for the purpose of
vibration reduction have been presented, such as balancing of rotating and recipro-
cating machine, contro l of natural frequency, damping and stiffness modification,
isolat ors, and absorbers. Some of the techniques will be introduced briefly in this
chapter.
An active vibratio n control is required for a system if it needs an external power
to perform it s function. Examples of some active v ibration control include, (1) usi ng
hybrid mass dampers to apply a control force to a movable mass so as to reduce
building sway caused by wind and seismic waves, (2) reducing aircraft cabin noise
by attenuating the vi bration of the large panels of thin metal that form the cabin
walls, (3) damping out vibrations using piezoelectric devices installed on the trailing
edge of helicopter blades, etc.
4.2 Passive control
4.2.1 Isolators
Vibration isolation methods are used to reduce the undesired effects of vibration. It
involves the insertion of a resilient member called an isolator between the vibrating
mass and the source of vibration so that a reduction in the dynamic response of
the system is achieved under specified conditions of vibration excitation [4]. A n
isolat ion system is said to be active or passive depending on whether or not external
power is required for the isolator to perform its function. A passive i solator consists
63