Du C., Xie L. Modeling and Control of Vibration in Mechanical Systems
Подождите немного. Документ загружается.

24 Modeling and Control of Vibration in Mechanical Systems
10
2
10
3
10
4
−60
−50
−40
−30
−20
−10
0
10
20
Frequency(Hz)
Magnitude(dB)
FIGURE 2.4
Multiplicative uncertainty of a VCM.
Modeling of Disk Drive System and Its Vibration 25
roughly classified into two categories: static models and dynamic models. There
are various static models for friction, for example, the Coulomb model, the viscous
model, and friction models with t he Stribeck effect, etc. However, a static friction
model cannot capture observed friction phenomena like hysteresis, positio n depen-
dence, and variations in breakaway forces. Therefore, a friction model involving
dynamics is necessary to describe friction phenomena accuratel y. A rel at ively new
dynamic friction model proposed in [43] combines the Dahl stiction behavio r with
arbitrary steady state frict ion characteristics, which is able to include the Str ibeck
effect. A nonli near friction observer is then required for position control because
the involved interim state is not measurable and has to be observed in order to es-
timate the friction fo rce. Later, to overcome the limitations of the above model, an
integrated model is proposed in [44], which is used in [41] for VCM pivot friction
modeling in HDDs. The resultant friction model needs to be iteratively impr oved and
verified using the measured and the simulated responses. Another dynamic model
used in VCM pivot friction modeling is the preload and two-slope model, which is
detailed in [40, 42] respectively in the frequency domain and the time domain. How-
ever, although the time-domain approach provides a good match between the time
domain response of the model and the data collected, it cannot guarantee a good
match in the frequency domain, and vice versa.
The non-model based appr oaches include the neural network method [46][47] and
the disturbance observer method [45]. The neural network method does not require
full knowledge of t he no nlinearity model, but its implementation in real di sk drives
seems difficult because of sl ow convergence [48]. In [45], a novel method for the
cancelation of pivot n onlinearities is proposed and it consists of an accelerometer
and a disturbance observer. The accelerometer is employed to linearize the dynam-
ics fr om the desired input signal to carriage angular acceleration, and the observer
estimates the nonlinear disturbances d ue to pivot friction for disturbance cancelation.
In this sectio n, a mathematical model will be developed to closely describe the
friction hysteresis behavior. Among existing hysteresis models in the literature, the
Prandtl model [50] is less complex and more attractive in real-time applications. The
element ary operator in the Prandtl hysteresis model is a rate-independent backlash
or linear play operator, defined by p
r
(π
0
, x(t)), where x(t) is the actuator response
and π
0
∈ R is usually initialized to 0. Hysteresis nonlin earity can b e modeled by a
linearly weight ed superposition of many backlash operator s with different threshold
r > 0 and weight values w
b
, i.e.,
F
h
(x(t)) =
Z
∞
0
w
b
(r)p
r
[π
0
, x(t)]dr, (2.15 )
where the weight w
b
defines the ratio of the backlash operator, as seen in Figure 2.5.
In order to have an accurate mathematical model for the hysteresis, th e creep model
proposed in [49] is al so incorporat ed. Hence we consider the operator model given
by
F (x(t)) = ax(t) +
Z
∞
0
w
b
(r)p
r
[π
0
, x(t)]dr +
Z
∞
0
w
c
(λ)l
λ
[ξ
0
, x(t)]dλ,
26 Modeling and Control of Vibration in Mechanical Systems
(2.16 )
where t ∈ [0, T ], a, w
b
(r) and w
c
(λ) are parameters to be determined, p
r
and l
λ
are
the elementary hysteresis and linear creep operators, and are defined as follows.
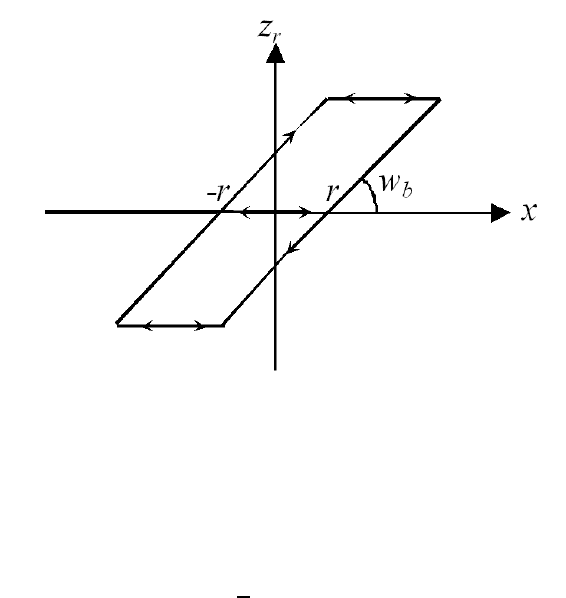
The elementary h ysteresis o perator p
r
with threshold r is d efined as the solution
operator p
r
[π
0
, x(t)] = z
r
(t) o f the rate in dependent hybrid differential equation
˙z
r
(t) =
˙x(t), if x(t) = z
r
(t) − r
0, if z
r
(t) − r < x(t) < z
r
(t) + r
˙x(t), if x(t) = z
r
(t) + r
with the init ial value
z
r
(0) = max{x(0) − r, min{x(0) + r, π
0
(r)}}. (2.17 )
FIGURE 2.5
The op erator z
r
versus x.
Define the linear creep operator l
λ
with λ > 0 as the solution operator l
λ
[ξ
0
, x(t)] =
z
λ
(t) o f the differential equation
1
λ
˙z
λ
(t) + z
λ
(t) = x(t) (2.18 )
with the init ial value equation
z
λ
(0) = ξ
0
(λ).
Modeling of Disk Drive System and Its Vibration 27
The explicit integral formula for the linear creep operator l
λ
is as foll ows.
l
λ
[ξ
0
, x(t)] = e
−λt
ξ
0
(λ) + λ
Z
t
0
e
λ(τ−t)
x(τ)dτ. (2.19 )
For numerical implementation of t he operator-based modeling, a discrete-time
model F (x(k)) of the operator F (x(t)) in (2.16) is developed as fo llows.
F (x(k)) = ax(k) +
n
X
i=1
w
bi
p
r
i
[π
0
, x(k)] +
m
X
j=1
w
cj
l
λ
j
[ξ
0
, x(k)], (2 .20)
where
1) the output sequence of the discrete hysteresis operato r is calculated by
p
r
i
[π
0
, x(k)] = z
r
i
(k), (2.21)
z
r
i
(k) =
x(k) + r
i
, if z
r
i
(k − 1) − r
i
≥ x(k)
z
r
i
(k − 1), if z
r
i
(k − 1) − r
i
< x (k) < z
r
i
(k − 1) + r
i
x(k) − r
i
, if z
r
i
(k − 1) + r
i
≤ x(k)
with the init ial value z
r
i
(0) = max{x(0) − r
i
, min{x(0) + r
i
, π
0
(r
i
)}};
2) t he discrete counterpart to the continuou s elementary creep operator is given by
l
λ
j
[ξ
0
, x(k)] = z
λ
j
(k) (2.22 )
with
z
λ
j
(k + 1) = e
−λ
j
T
s
· z
λ
j
(k) + (1 − e
−λ
j
T
s
) · x(k) (2 .23)
and the initial value z
λ
j
(0) = ξ
0
(λ
j
).
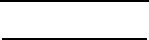
Consider the hysteresis curve of the frictio n f versus the displacement x in Figure
2.6. Let f
e
= F (x(k)) be the approximated friction, then the approx imation erro r
e = f −f
e
. We define the energy gain between the actuator position and the error as
kT
ex
k
∞
=
v
u
u
t
P
L
k=1
e
T
(k)e(k)
P
L
k=1
x
T
(k)x(k)
, (2.24 )
where L is the number of d at a points.
Denote w
b
= (w
b1
, w
b2
, ···, w
bn
), w
c
= (w
c1
, w
c2
, ···, w
cm
), and Λ = (λ(1),
λ(2), ···, λ(m)). We aim to find optimal parameters a, w
b
, w
c
, and Λ in (2.20) so
that (2.24) is minimized, and thus a model (2.20) can be obt ai ned to approx imate the
friction f with the displacement x as t he input.
Note that kT
ex
k
∞
is a function of a, w
b
, w
c
, and Λ, and is denoted as
kT
ex
k
∞
= ℓ (a, w
b
, w
c
, Λ) . (2.25)
The MATLAB fun ct ion fminsearch can be used to minimize ℓ (a, w
b
, w
c
, Λ) with
respect to (a, w
b
, w
c
, Λ).
28 Modeling and Control of Vibration in Mechanical Systems
FIGURE 2.6
Fricti on f versus actuator displacement x.
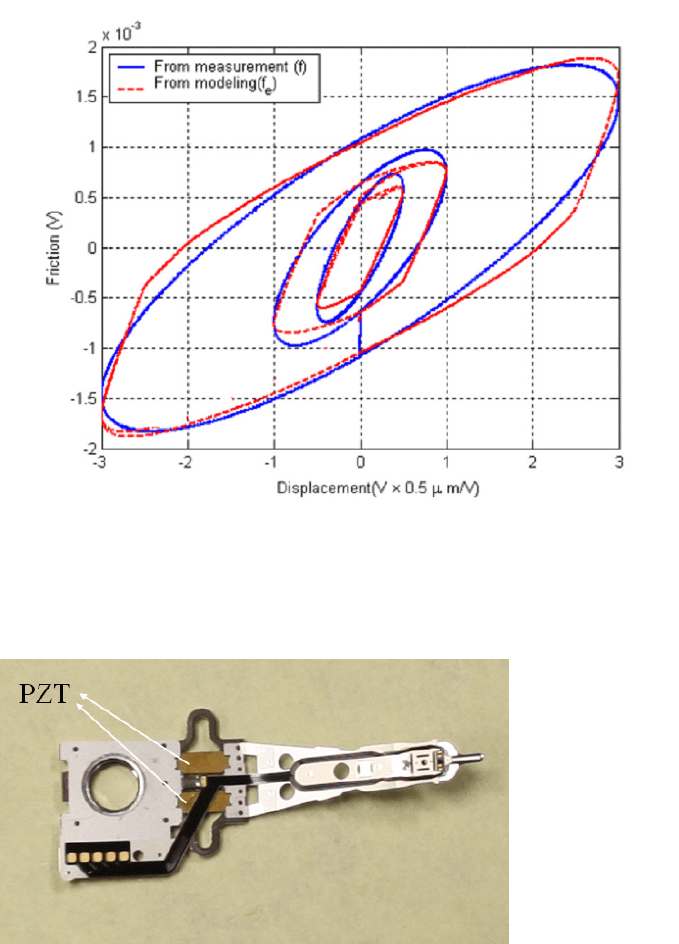
FIGURE 2.7
A PZT actuated suspension.
Modeling of Disk Drive System and Its Vibration 29
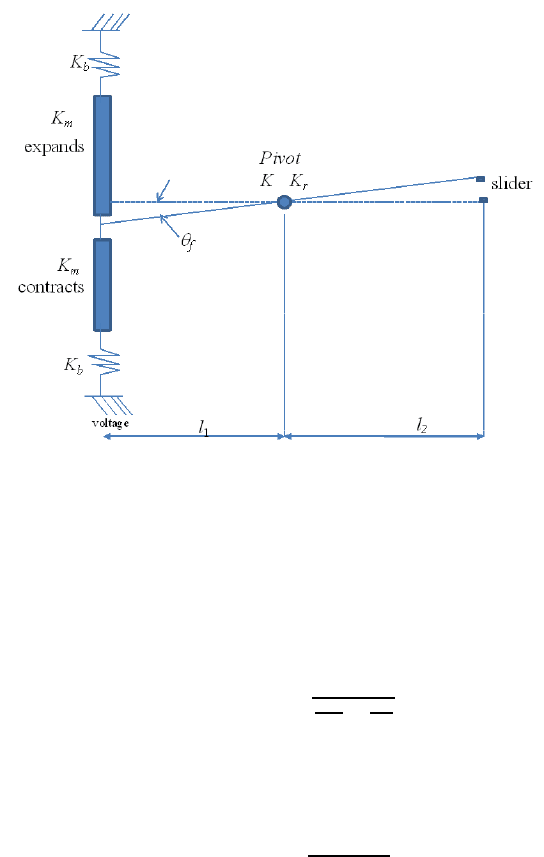
2.3.3 Modeling of a PZT microactuator
A piezoelectric-based microactuator located on the suspension as shown in Figure
2.7 is considered in this section. The mechanical operati on of th e microactuator
can be understood via an equivalent spring- mass system. The compliance of the
base plate is simplified as a single spring K
b
, and the compliance of the flex hinge
element s is simplified as a single rotational spr ing K
r
.
FIGURE 2.8
Equivalent spring mass system of PZT microactuator.
An import ant point for PZT microactuato r modeli ng is that the PZT element acts in
series wi th the b ase plate springs. Thus the displacement o f th e PZT element results
in displacements of the springs. The PZT and the base plate wi th spring constants
K
m
and K
b
can be equivalent to a single spring with constant
K
T
=
2
1
K
m
+
1
K
b
. (2.26)
The model is derived b y applying forces at the interface of the piezo element and
the base plate sprin g and b y summing moments abou t the pivot point. The free
expansion of the piezo element is expressed as
θ
f
=
L
m
d
exp
V
cl
1
, (2.27 )
30 Modeling and Control of Vibration in Mechanical Systems
where L
m
is the piezo leng th, d
exp
is the piezo expansion coefficient, V is the volt-
age, c is the piezo thickness, and l
1
is the length as indicated in Figure 2.8.
The following second order differential equation can be derived to capture the
dynamic behavior of the microactutor:
K
d
2
θ
dt
+ C
dθ
dt
+ (K
r
+ K
T
l
2
1
)θ =
K
T
L
m
d
exp
l
1
c
V, (2.28 )
where K is the torsio nal inertia, K
r
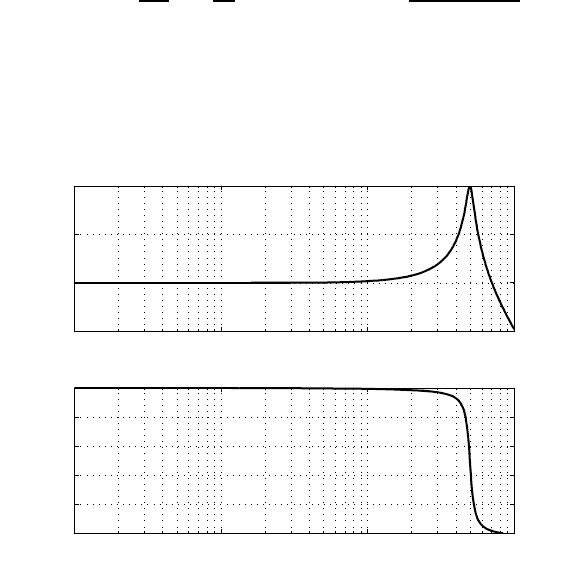
is the torsional spring rate. A typical frequency
response of the PZT microactuator from volt age input to position output is shown in
Figur e 2.9.
10
1
10
2
10
3
10
4
−30
−20
−10
0
Magnitude(dB)
10
1
10
2
10
3
10
4
−200
−160
−120
−80
−40
0
Phase(deg)
Frequency(Hz)
FIGURE 2.9
A typical frequency response of the PZT microactuator.
2.3.4 An example
2.3.4.1 Dynamics modeling
The hard disk drive und er consideration is sh own in Figure 2.10. It includes the VCM
actuator mounted with the arm and the suspension/head. The actuator i s driven by a
driver which converts voltage differences into current differences l inearly.
The actuator dynamics measurement is taken using a Laser Doppler Vibrometer
(LDV) and a Dynamic Signal Analyzer (DSA). The displacement y i s measured via

Modeling of Disk Drive System and Its Vibration 31
FIGURE 2.10
An opened 1.8-inch hard disk drive.
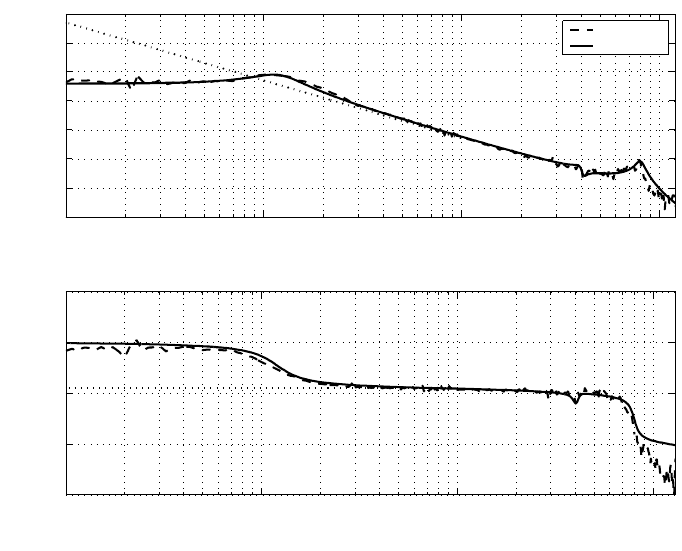
the LDV, and the frequency response is measured by using the DSA to generate a
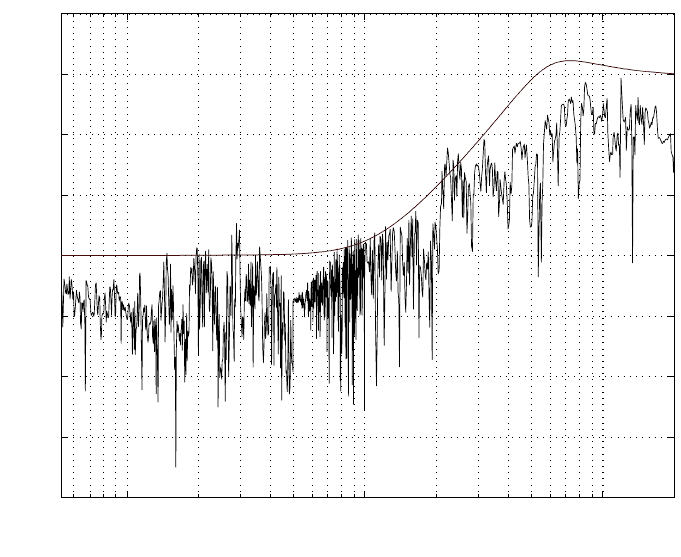
swept sine sign al to excite the actuator. The measured frequency response is shown
in Figure 2.11 , where the modeled one is plotted from t he following transfer function
P (s) obtained by curve fitting to the measured frequency responses.
P (s) = KP
f
(s)P
res
(s), K = 5.3290 ×10
17
,
P
f
(s) =
1
s
2
+ 2 × 0.25 × 2π120s + (2π120)
2
,
P
res
(s) =
s
2
+ 1081s + 7.3 × 10
8
(s
2
+ 1056s + 6.964 ×10
8
)(s
2
+ 6032s + 2.527 ×10
9
)
. (2.29)
The resonance of P
f
(s) at 120 Hz is due to the nonli nearity of actuator pivot
friction. When the friction nonlinearity is neglected, it is replaced with the pure
double integrators model, i.e.,
P (s) =
K
s
2
P
res
(s), K = 4.8209 ×10
17
, (2.30 )
which is plotted as the dotted curves in Figure 2.11. However, the friction in the
actuator pivot [39] [40] is known to limit the low frequency gain of the control loop.
Translated to the error rejection function or sensitivity fu nction, it lif ts the magnitude
32 Modeling and Control of Vibration in Mechanical Systems
10
1
10
2
10
3
10
4
−40
−20
0
20
40
60
80
100
Magnitude(dB)
10
1
10
2
10
3
10
4
−600
−400
−200
0
200
Frequency(Hz)
Phase(deg)
Measured
Modeled
FIGURE 2.11
Measured and modeled frequency responses of the VCM actuatio n system (LDV
range 0.5 µm/V).
Modeling of Disk Drive System and Its Vibration 33
of the sensitivity function at low frequencies, and thus reduces the ability of the
control loop to reject low-frequency vibrations and affects the positioning accuracy.
Therefore, it is necessary to compensate the friction impact.
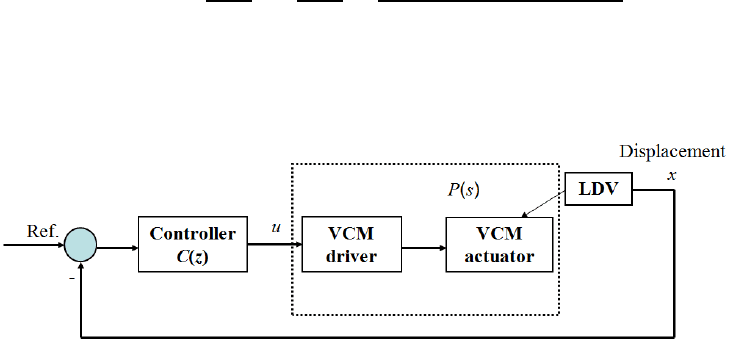
2.3.4.2 Friction measurement and modeling
Due to t he fluctuation of the head when the d isk is rotating (rotational speed is 4200
RPM), it is difficult to have a steady displacement signal of the head. Thus the
friction measurement is carried out under the closed loop control as sh own in Figure
2.12. The control ler C(z) is a PI D control ler combined with a notch filter and is
expressed in (2.31). The sampling time T
s
is 83.3 ms. With the controller, the open-
loop 0 dB crossover frequ ency is 945 Hz, the gain margin is 8.7 dB, and the phase
margin is 49 deg.
C(z) = k
c
(k
p
+ k
d
z − 1
T
s
z
+ k
i
T
s
z − 1
) ×
0.9023z
2
+ 0.9467z + 0.724 2
z
2
+ 0.929z + 0.6442
,
k
c
= 0.0625, k
p
= 0 .8, k
d
= 400 × 10
−6
, k
i
= 400. (2. 31)
FIGURE 2.12
Closed control loop of a disk drive with a VCM actuator for frict ion measurement
via LDV.
A 10 Hz sinusoidal signal w ith increasing amplitude of 0.5, 1 , and 3 V is r e-
spectively used as the reference signal in Figure 2.12. The control signal u and
displacement x are measured, and shown in Figure 2 .13.
The VCM actuator model with consideration of nonlinearity F (x) is shown in
Figur e 2.14, which includes two pure integrators, the resonance modes P
res
(s) and
the gain K given in (2.30).
With the measured u and x, u
a
can be obtained from x, and thus f = u −u
a
. The
relation between x and f can be obtained and shown as hysteresis curves in Figure
2.6.